측면주사음탐기 센서 기술 동향 및 응용
Trends and Applications on Multi-beam Side Scan Sonar Sensor Technology
- 저자
- 계중읍, 조재일, 유원필, 최성록, 박재현 / 3D인지플랫폼연구실
- 권호
- 28권 6호 (통권 144)
- 논문구분
- 일반 논문
- 페이지
- 167-0
- 발행일자
- 2013.12.15
- DOI
- 10.22648/ETRI.2013.J.280617
- 초록
- 측면주사음탐기(side scan sonar) 센서는 해저면의 영상을 실시간으로 탐색하는 장비로서 해양탐사 및 지질조사, 해저통신 및 어초조사, 기뢰 및 잠수정 탐색 등 해양탐사와 관련한 대표적 장비라고 할 수 있다. 센서는 해저와 목표물을 표시하기 위해 소나 플랫폼의 움직임을 사용하며, 동작주파수 범위는 20kHz~500kHz이다. 이 주파수는 요구되는 깊이와 목표물의 크기에 의해서 결정된다. 센서는 수직으로 45˚, 수평으로 2˚ 정도의 신호전파 방사각도 폭을 가진다. 최근에는 해양탐사와 개발을 위해 빠른 스캔속도와 정확한 정보, 고해상도의 영상을 얻기 위해 해저면에 대한 다중빔 영상센서의 핵심기술로 활용되면서 그 활용성과 중요성이 점차 증가되고 있다. 본고에서는 측면주사소나 센서의 기본 원리 및 종류,다중빔측면주사소나 기술동향, 응용 분야의 사례를 소개함으로써, 국내 기반기술 및 상용화 개발이 취약한 측면주사 음탐기 센서에 대한 이해를 돕고자 한다.
Share
I. 머리말
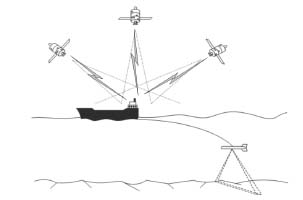
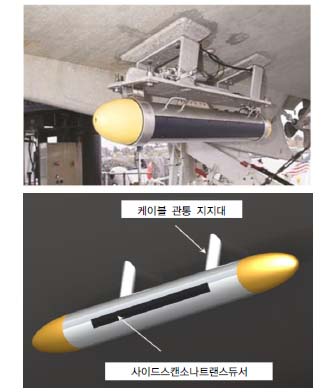
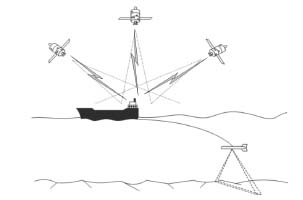
해저 지형은 시간적, 공간적으로도 복잡하게 변동하고 있다는 점에서 이를 정확히 기술하기 위해서는 이에 상응하는 방법이 필요하다. 즉, 해저지형의 최적 자료를 획득할 수 있는 연구의 필요성이 커지고 있다. 육상과 달리 해저에서는 지질학적인 연구방법을 적용하는 것이 대단히 어렵고 또한 많은 비용과 시간을 필요로 한다. 수중예인시스템(Underwater Towed Vehicle System)인 다중빔측면주사 음탐기*(Multi-Beam Side Scan Sonar)는 해저면의 영상을 실시간으로 탐색하는 장비로써 민간 분야에서는 해양탐사 및 지질조사, 해저통신 및 전력선 케이블 설치 보수 조사, 어초 조사 및 해양 정화사업 활용, 해저 유물 및 광물탐사에 사용되며, 군수분야는 기뢰 및 잠수정 탐색과 전자해도 기반 해저면 맵핑(Mapping) 기술로 대잠작전 자료 구축에 활용되는 등 해양 탐사와 관련한 대표적 시스템이라고 할 수 있다(그림 1) 참조).
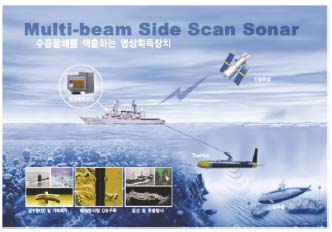
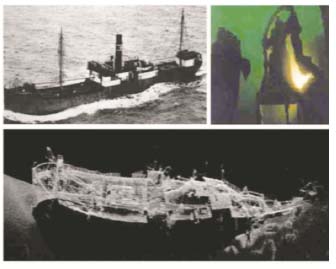
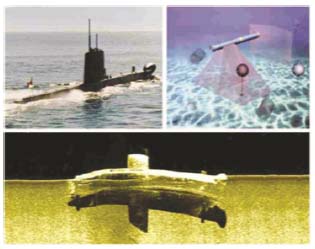
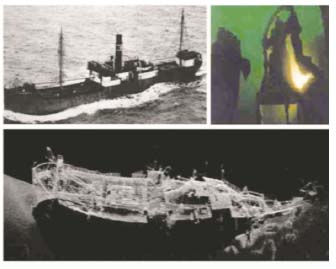
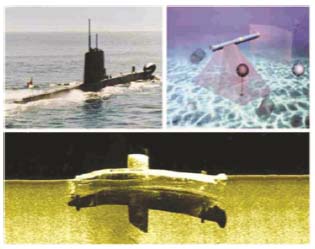
수중탐색 음탐기는 많은 해양 측량활동 및 구조활동에서 큰 역할을 담당하고 있고 군사용으로는 잠수함 및 기뢰탐색에도 그 중요성이 날로 증대되고 있다((그림 2, 3) 참조). 이러한 시스템은 국제 해양공학의 예인시스템처럼 위험한 작업 환경에서의 인간의 조작을 대체하고 있고 전통적인 방법을 획기적으로 대체하는 분명한 장점을 가지고 있다. 한편, 예인시스템에 대한 정확한 거동 해석은 해양탐사장비 개발 시에 시스템의 안정성, 운용성 및 경제성 등의 측면에서 매우 중요하다[1][2][3].
이러한 수중탐색 음탐기는 주로 측면주사 음탐기(Single-beam, Multi-beam), 선저탑재형음탐기 및 합성개구면음탐기(SAS: Ssynthetic Aperture Sonar)로 구분할 수 있으며, 최근 합성개구면음탐기의 기술발전 추세가 향상되고 있는 추세이다[4].
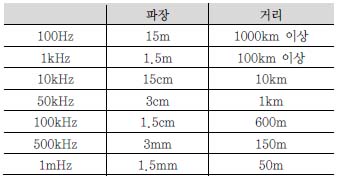
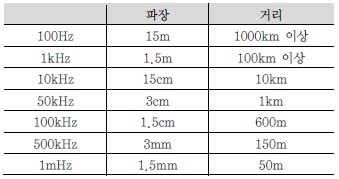
모든 음탐시스템은 수동적(passive) 소나와 능동적(active) 소나로 나눌 수 있다. 수동적 소나는 외부에서 생성된 소리를 단순히 수신하기만 하는 것으로써, 이때 음향신호는 하이드로폰(hydrophone)이라 불리는 수중 수신기를 통하여 수신하게 되며, 음원(source)으로 부터의 단방향 주행 시간만을 다루게 된다. 능동적 소나는 음향을 생성시킨 후 이를 수중을 통하여 내보내게 한다. 이 신호는 목표물에서 반사되며, 반사된 신호는 소나의 하이드로폰에서 수신된다. 실제 모든 측면주사 음탐기는 능동 시스템으로 되어 있다. 능동소나시스템을 구성 하는 구성체는 투사기인 프로젝터(projector)와 수신기인 하이드로폰이며, 이 구성체들은 또한 변환기(transducer) 라고도 불린다. 일반적으로 측면주사 음탐기의 토우피시(towfish)에 부착되는 프로젝터는 전기신호를 수중압력 파동(소리)으로 변형시키는 역할을 하며, 하이드로폰은 반대의 역할을 한다. 측면주사 음탐기에 있어서 변환기는 소리를 내보낼 수도 있고 받을 수도 있으며, 또한 이 둘의 역할을 모두하기도 한다. 특수한 경우 소리를 보내고 받는 두 개의 독립된 변환기를 갖는 것이 유리할 수도 있으나, 대부분의 중주파수 측면주사음탐시스템은 두 역할을 모두 하는 변환기를 사용하고 있다. 원하는대로 음탐기의 빔 모양을 만드는 것은 정교환 변환기를 만듬으로써 가능해지는데, 이를 통하여 매우 다양한 종류와 모양의 빔을 만들어 낼 수 있다. 즉, 변환기들은 전방향 혹은 단방향, 그리고 연속적인 신호 혹은 펄스신호를 만들어 낼 수 있으며 음파의 강도도 조절할 수 있다. 소리는 파동의 형태로 진행하는데, 이를 파악하기 위해서는 우리 눈에 보이는 파동의 형태를 관찰해야만 한다. 작은 공을 수면에 떨어뜨리면 수면 위에는 파동이 생겨난다. 이 파동은 공으로부터 바깥쪽으로 전파하여 간다. 이 공을 수면에서 눌렀다 놓았다 하는 동작을 반복하면, 이 파동의 생성은 계속되게 된다. 특정한 위치를 1초 동안에 통과하는 파동의 개수를 그 파동의 진동수(frequency)라고 부르며, 1초 동안의 1회 순환(cycle)을 1헤르츠(Hertz)로 표현한다. 각 파동의 동일 위상에서 측정되는 파동과 파동 사이의 거리는 파장(wavelength) 이라 한다. 파동이 통과하여 가는 비율이 그 파동의 속도를 결정하게 되는데, 수중에서의 소리 속도는 통상 1,500m/sec로 알려져 있으며, 이는 소나의 속도로 채택되어 있다. 측면주사 음탐기에 있어 위에서 언급한 파장과 진동수는 매우 중요하다. 수중 음향시스템에 있어 이들 중의 하나가 결정되면 다른 하나는 자동적으로 결정되게 된다. 고주파 음향의 경우 에너지는 해수에 의해 급격하게 감소되지만, 저주파의 음향에너지는 훨씬 작은 비율로 감소한다. 예를 들어 50Hz의 음파는 수천 킬로미터까지 전달되지만, 보통의 측면주사 음탐기에서 이용되는 50kHz의 음파는 단지 1∼2km를 진행할 뿐이다(<표 1> 참조). 이와 같이 주파수와 거리 사이의 관계는 많은 의미를 내포하고 있다. 만약 측면주사 음탐기 사용자가 먼 거리로 보내고 받기를 원한다면 저주파수의 음원을 사용해야 한다[4].
그러나 저주파수 음파는 긴 펄스 폭(pulse width)과 긴 펄스 시간(pulse length)을 갖기 때문에 낮은 해상도의 정보를 우리에게 주게 된다. 반대로 만약 정교한 상(image)을 원한다면 고주파수를 사용하는 것이 좋지만 짧은 파장의 음파는 먼 거리를 진행할 수 없고 결과적으로 사용범위가 제한적이다. 따라서 소나 이용자들은 유효 거리와 해상도 사이의 상호 교환 관계를 고려하여 자신의 사용 목적에 가장 적합한 주파수를 찾아야만 한다. 대부분의 소나시스템들은 중주파수를 100kHz, 고주파수를 500kHz로 사용하며, 100kHz는 대형의 목표물을 찾고자 할 때, 혹은 개략적인 지역조사를 위하여 사용되며, 토우피쉬로부터의 주사역 한계가 약 600미터이다. 반면, 더 높은 해상도를 만들어 내는 500kHz는 이상적인 환경 조건과 적절한 소나 기하 등이 보장될 때 약 150미터 범위까지 가능하지만 일반적인 사용 가능 주사역은 100미터이다. 두 주파수의 이 같은 차이는 사용자에게 하나의 시스템으로 광역 음탐기와 고해상도 음탐기를 겸용하게 하는 장점을 제공한다. 수중음향의 세기(power level)는 데시벨(decibel: dB로 표기)이라는 단위를 사용하여 표현하는데 이 단위는 소리의 수준을 측정하기에 적절한 로그(logarithmic) 단위로 되어 있다. 일반적으로 1마이크로바(microbar), 혹은 특정 거리에서(보통 1미터)의 마이크로파스칼(micropascal) 같은 표준과 비교하여 소나의 출력 수준은 표현된다. 측면주사 음탐기의 적용은 목표물 탐색, 해저면 상태조사, 석유 산업의 이용, 준설, 환경, 어업분야 활용 및 기뢰 탐색 등 다양한 분야의 핵심 기술로 활용되면서 그 활용성과 중요성이 점차 증가되고 있다. 측면주사 음탐기술은 이러한 광범위한 분야에서의 응용에도 불구하고, 미국, 유럽 및 일본에 비하여 수중해양과학분야의 발전이 상대적으로 미약한 국내에서는 그 동안 크게 주목 받지 못한 관계로 관련 핵심 기술의 확보가 아직 미약한 수준이다. 본고에서는 측면주사 음탐 기술에 대한 이해를 통하여 국내 관련 산업 기술개발을 촉진하고자, 측면주사 음탐기의 기본 원리 및 종류, 합성개구면 소나 기술개발 동향, 주요 응용 분야 등에 대하여 간략히 소개하고자 한다.
II. 측면주사 음탐기 센서 기술
1. 측면주사 음탐기의 기본 원리
• 측면주사 음탐기 및 수중예인체(towfish)
측면주사 음탐기 센서 시스템의 구성은 응용 분야에 따라 때로는 매우 복잡하게 구성되지만, 기본적인 구성은(그림 4)에 보는 바와 같이 단일 케이블에 연결된 수중예인체 시스템 구조이다.
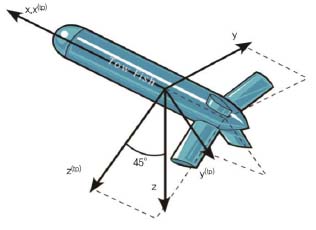
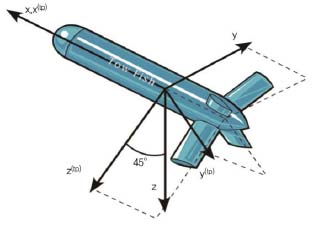
수중예인체(Towfish)는 선체, 수력감압장치, 4개의 수평 꼬리날개로 구성되며 (그림 5)에서 보는 바와 같이 꼬리날개(tailplane)에 맞춰 좌표계가 정렬되어 힘을 계산할 수 있다. 수평 꼬리날개의 힘은 수력학적 힘들의 결합 이전의 예인 좌표계(vehicle frame)로 변환되며, 수평 꼬리날개 좌표계(tailplane frame)는 수중예인체의 χ축에 대해 −45° 회전에 의해 예인체 좌표계(vehicle frame)와 관련된다[2].
• 측면주사 음탐기 기본 개념
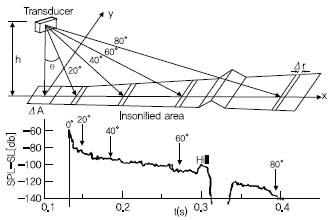
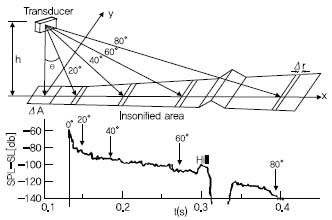
대부분의 소나 장치들은 수중에서 거리를 측정하거나 수중 및 지질에 관련된 유용한 정보를 취득하기 위해 수행하는 일련의 운용은 수중에서의 음파 동작을 이용하여 이뤄진다. 수중에서 음파를 발생시키기 위해서는 보편적으로 압전소자(PZT: Piezoelectric element)를 이용하여 만들어진 센서를 이용하여 음파 빔을 형성하여 전달되도록 설계되어 있다. 센서를 이용하여 초음파를 송신, 수신하고 입력되는 신호를 (그림 6)과 같이 신호 강도를 이용하여 영상을 만드는 개념은 하나의 점을 연결하면 선이 되고 여러 개의 선을 병렬로 조밀하게 나열하면 하나의 면이 만들어진다. 이것이 측면주사 음탐기에서 초음파 영상 구현의 기본적인 개념이다.
• 측면주사 음탐기 작동 원리
측면주사 음탐기는 수체의 하부 지면에 대한 광역사진을 제공하는 음향 영상기기로 정의된다. 이는 음탐 기록장치의 충전된 전기력으로 기록장치로부터 명령을 받아 변환기(transducer)로 전달되고, 이 변환기는 음파를 발생시켜 수중으로 발사한다. 그 후 매우 짧은 시간 동안(수 천분의 1초부터 1초 이상의 시간까지) 해저면으로부터 되돌아오는 회귀파가 다시 변환기로 수신되며, 이 신호는 시간변화 이득(time varied gain) 곡선에 의하여 증폭된 후, 케이블을 통하여 다시 기록장치로 전달 된다. 기록장치는 이 신호에 대한 처리과정을 거친 후 계수화하고, 이 신호가 최종 기록에 나타날 위치를 픽셀(pixel) 단위로 계산한다. 그리고 이 신호를 한 번에 한 줄씩(한 주사씩) 감열지나 감전지에 출력한다. 측면주사 작동 이론의 주요 부분은 영상화의 많은 과정이 이루어 지는 수중장치에 집중된다. 비록 기록장치가 시스템에 대한 명령을 내리며, 출력기까지 포함하고 있긴 하지만, 변환기는 수중 음향장치의 음원이며 동시에 영상화의 열쇄가 되는 부분이기 때문이다. 변환기의 주요 부분은 압전도기판(piezo-electric ceramic plate)으로써, 이는 전기장의 변화에 의하여 팽창하거나 수축하게 된다. 적절한 모양의 변환기 배열을 만들기 위해서는 특별한 모양의 많은 도기판 혹은 결정체(crystal)들이 하나의 선을 이룰 수 있도록 전기적으로 묶어 주어야 한다. 이 배열은 다시 반사체에 결합되어 음향적으로 적당한 복합체에 담겨지게 된다. 음탐기의 개시 전기장치(triggering elec-tronics)가 작동되면, 전기장은 도기판의 양면에 있는 얇은 은막을 통해서 전달된다. 이와 같이 하여 전압이 도기판에 걸리면, 이 판의 크기가 급작스럽게 변화 한다. 변환기와 접촉하고 있는 물에게 압력을 제공하여 결국 음파를 투사시키게 하는 것은 바로 이 판 모양의 변화이다. 몇 번의 변화 사이클이 지나가면 이 도기판 배열은 다시 정지상태로 돌아오게 된다. 해저면에서 반사된 파가 저진폭의 모양을 갖고 돌아와 다시 이 배열에 부딪치게 되면, 케이블을 따라 기록장치로 전달된다. 변환기 배열의 크기를 매우 정밀하게 조절하면 음파의 모양을 정확하게 조절할 수 있는데 이를 빔 생성(beam forming)이라고 한다. 측면주사 빔은 수평적으로는 매우 좁은데 이것은 각각의 투사 음파가 해수와 해저면의 매우 얇고 긴 조각 부분만을 통과하도록 하기 위함이다. 반면, 이 빔은 수직적으로는 매우 넓어서 한 번에 수주 전체를 통과할 수 있도록 되어 있다. 이같은 부채꼴 모양의 빔은 결국 시스템으로 하여금 해수 표면으로부터 해저면에 이르기까지 가능한 모든 반사파에 대한 기록이 만들어지게 한다. 해저면과 수중의 불연속면 등에 의하여 반사된 음향에너지는 변환기로 수신된 후, 케이블을 따라 기록장치에 전달되어 기록지에 출력되거나 화면에 보여지게 된다. 우리 눈에 보이는 음탐 출력자료는 반사파의 모양은 물론, 빔의 모양과 펄스 시간(pulse length)에 좌우되게 된다. 음파가 변환기로부터 발사되면, 이는 매우 급격히 에너지를 잃게 된다(attenuation). 수중에서의 물리적 화학적 작용들은 투사파와 반사파의 세기를 약화시키는데 이를 흡수(absorption)라고 한다. 해수에서의 흡수는 담수에서의 그것보다도 훨씬 빨리 일어난다. 데시벨 단위로 측정했을 때 반사파의 진폭은 흡수과정을 통해서 거리에 따라 선형적으로 감소한다. 따라서 이 흡수과정이 빔 퍼짐(beam spreading), 산란(scattering) 등과 같은 여타의 에너지 손실 효과와 겹쳐질 때 반사되는 음파 에너지는 거리에 따라 기하급수적으로 감소하게 된다. 측면주사 음탐기가 흔히 사용되는 범위 안에서 소리 흡수(dB/meter)는 대략 주파수와 비례하여 증가한다. 소나 시스템에서는 토우피시 바로 아래 지역으로부터 오는 가까운 반사파나 주사역의 가장 자리로부터 오는 먼 반사파나 모두 한결같이 표시가 되어야만 한다. 이를 위해서는 음파가 발사된 직후 이득(gain)이 빠르게 증가하여야 하고, 이는 또한 다음번 음파가 발사되기 직전 원래의 상태로 떨어져야 한다. 토우피시 바로 아래의 해저로부터 수신되는 첫 번째 반사파는 매우 높은 에너지 상태이며, 따라서 토우피시에서의 수신 이득이 높을 필요가 없다. 그러나 음파가 토우피시로부터 멀리 투과될수록(대부분 시간에 비례하여) 더욱더 많이 희석, 산란, 흡수되게 된다. 따라서 먼 거리로부터의 수신파는 그 에너지 수준이 매우 낮아서 이를 정상화시키려면 높은 증폭을 시켜야만 한다. 이는 결국 시간에 따라 이득을 조절해야 함을 의미하는데, 이를 시간변 화이득(TVG: Time Varied Gain)이라고 한다. 이와 같은 조절은 음탐기 사용자에게는 매우 당연한 것이긴 하지만, 실제로 이 시간 변화 이득 회로는 자료의 질에 결정적인 영향을 미치게 된다[5][6].
2. 측면주사 음탐기의 구성 및 운용
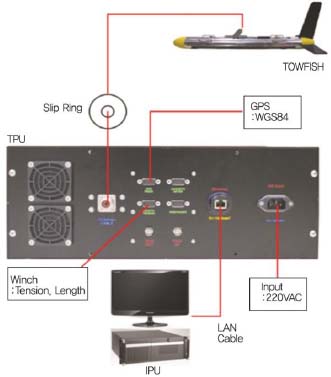
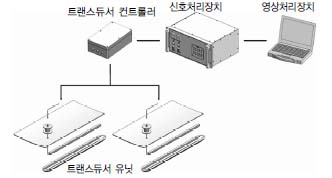
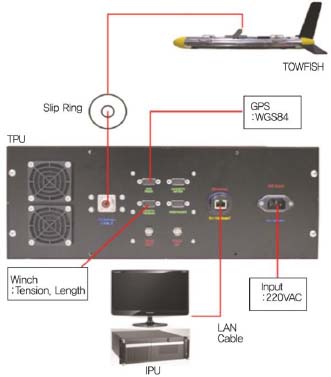
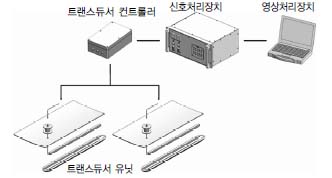
측면주사 음탐기 센서 시스템의 구성은 응용 분야에 따라 때로는 매우 복잡하게 구성되지만, 기본적 수중예 인체의 주요 형상 및 특성으로서는 (그림 7)과 같이 트랜스듀서 유닛부와 컨트롤부로 구성된 수중예인체(towfish), 신호처리장치(TPU)인 제어부, 영상처리장치(IPU))인 콘솔과 소프트웨어(SW)로 구성되어 있으며, 100∼500 kHz 주파수대역을 갖는 다중빔(multi-beam) 트랜스듀서로 운용환경 및 주파수를 고려하여 제작되며 트랜스듀서 고정을 위한 브라켓을 설치한 후 선체 바닥 케이블 통과 부분 수밀을 위한 케이블 그랜드유닛과 윈치(winch) 및 침하기(depressor)로 구성되어 있다. 신호 처리기(TPU)는 수중예인체(towfish)로부터 초음파 데이터를 전송 받아 신호 처리하여 영상처리기(IPU)로 전송 하며, 영상처리기와 함께 rack에 설치되고 GPS, 윈치와 연결되는 케이블은 매설하여 설치된다. 수중침하기(depressor)는 수중예인체(towfish)를 깊은 수심에 위치하기 위한 심해용 침하기로서, 고속 운행 시에도 적정 고도 유지가 가능하다((그림 8) 참조).

윈치(winch)는 예인용 강선케이블과 함께 함정 후미에 설치되며, 케이블 길이, 장력 측정 센서 및 케이블 정렬기를 포함한다. 작동원리는 케이블 길이를 윈치에서 직접 조절하거나 상황실에서 원격으로 조절이 가능하다((그림 9) 참조).

수중예인체(towfish)의 운용은 예인용 케이블과 연결하여 수중에서 초음파를 송수신하며, 분실방지용 안전 장치를 내장하여 sheave와 함께 설치 및 운용된다. 수중예인체의 예인은 윈치나 원격 조이스틱을 사용하여 케이블을 조절하며, 수중예인체를 적정고도에 위치시킨다. 상황실에서는 파라미터를 조절하여 영상을 획득한다. (그림 10)은 수중예인체(towfish)의 해상 운용(SAT) 장면을 보여준다.

3. 측면주사 음탐기의 핵심기술
기존의 측면주사 음탐기 기술들은 수중 및 해저탐색을 목적으로 주로 연구되었으며, 최근에는 위성에서의 기술 관측, 무인 로봇 센서 및 3차원 영상 모델링을 위한 기술들이 연구된다. 기본적인 측면주사 음탐기 기술들을 정리하면 다음과 같다.
• Towfish: 변환기와 신호조절 회로를 포함하고 있는 수중 감지장치로써, 외관은 금속으로 된 어뢰 혹은 실린더 모양을 하고 있으며, 양 측면에 부착되어 있는 변환기에 의하여 펄스 신호를 수중으로 발사하고, 또한 반사된 신호를 받아드리는 역할을 수행함. 케이블에 의해 선상의 레코더와 연결되어 있고, 대개 선박의 후미에서 예인 되는 핵심부품 기술
• Transducer: 수중탐색기의 전기역학적인 부분으로서towfish 내에 장착되어 전기에너지를 음향에너지로 바꾸거나, 혹은 그 반대의 역할을 수행하며, 전기장의 변화에 의하여 팽창하거나 수축하는 여러개의 압전도기판(PZT)들을 전기적으로 묶는 변환기 배열(transducer array) 기술
• Mosaic: 인접지역에서 얻어진 소나 영상들을 연속적으로 연결함으로써 만들어진 2차원 해저면 영상 기술로 넓은 범위와 높은 해상도의 영상을 얻는 핵심기술
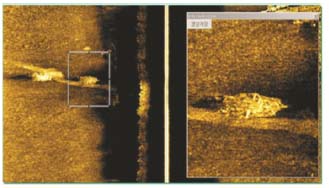
• Detail Mapping(상세 영상화): 특정 부분 영상화인 상세 영상화(detail mapping) 작업은 광역조사와는 다른 방법으로 수행되며, 광역조사의 경우는 넓은 주사역, 높은 토우피시 고도, 낮은 소나 주파수, 그리고 다양한 예인 속도가 사용됨. 작업자는 최소한의 음향화만으로 해저면 물체를 식별해야 하며, 탐색 도중에는 가능성 있는 모든 물체들을 기록함. 반면 상세 영상작업의 경우에는 특정한 예인속도와 빠른 핑 속도가 필요하다. 이러한 상세 영상화 작업은 큰 물체의 작은 부분뿐만 아니라 매우 작은 물체를 식별하는 목적으로도 사용되는데, 대상 물체에 대한 가능한 많은 정보가 필요한 기뢰 탐색에 있어 잠수부나 폭발물 제거용 ROV를 투입하기 전에 그 목표물에 대한 사전 식별작업 기술
III. 측면주사 음탐기 기술 동향 및 응용
1. Single/Multi Beam Side Scan Sonar
측면주사 음탐기는 그 유형과 조사 가능 수심, 사용 주파수에 있어 매우 다양하다. 정교하게 형성된 빔을 발사하고, 또한 그 반사파들을 수신하기에 적당하도록 조절한다. 수중영상화 작업에 있어서는 주파수(50kHz∼500kHz 사이)를 두 개 이상 이용하는 다중(multi) 주파수 소나가 이용되고 있다. 또한 다양한 주파수의 음탐기들이 이용 가능하며, 이들은 여러 종류의 조사 목적을 충족시킬 수 있다. 25, 50kHz와 같은 저주파수는 수중에서 멀리까지 진행하고, 따라서 넓은 범위를 조사하기에 적당하지만, 긴 파장으로 인해 영상의 해상도는 높지 않다. 이들은 5km 이상의 스와스(swath) 너비를 제공 하지만, 이들은 매우 넓은 범위를 조사할 때나 혹은 목표물의 크기가 매우 큰 경우에만 사용될 뿐이다. 반대로 300∼500kHz 범위의 고주파수음탐기들은 불과 수 인치의 목표물까지도 구분해낼 수가 있다. 이 같은 고해상도 시스템들은 스와스 너비가 단지 수 백미터에 불과하기 때문에, 기뢰 탐색이나 오래된 침몰선 같이 심하게 부식된 목표물 탐색의 경우처럼, 좁은 지역을 자세하게 조사하고자 할 때 사용된다. 적당한 주사역과 해상도에 대한 절충으로써, 90∼125kHz 사이의 중주파수음탐기가 가장 많이 사용된다. 수중탐색이나 조사에 사용되는 기본적인 음탐기들은 조절/표시부(control /display), 예인 변환기 구성부(towed transducer assembly), 그리고 이 두 부분을 연결하는 전기/지지(electromechani-cal) 케이블이다.
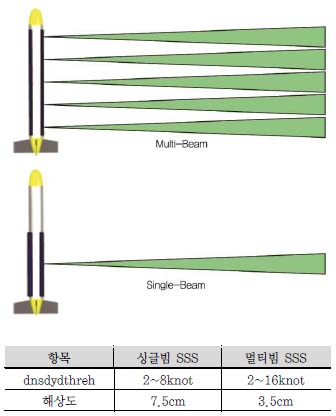
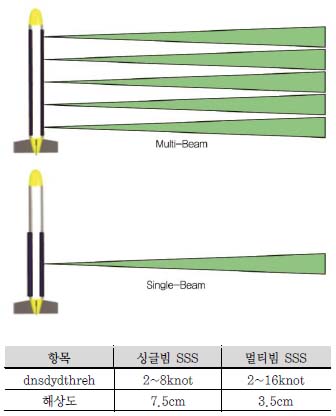
(그림 11)과 같이 single beam 측면주사 음탐기는 장비의 외형이 작아서 이동성이 좋으나 다중빔에 비해 운용속도의 제한이 있고, 해상도가 좋지못한 단점이 있다. 또한 multi beam 측면주사 음탐기는 장비 외형이 커져 운용의 어려움이 존재하나, 다수의 빔을 수신함으로써 운용속도가 빠르고 수평해상도가 높으며 송수신 감도가 좋다는 장점을 가지고 있다.
2. Mounted Side Scan Sonar
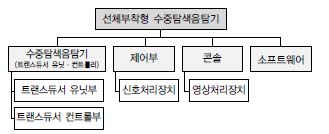
선저부착형 측면주사 음탐기(Mounted Multi beam Side Scan Sonar)는 트랜스듀서유닛, 컨트롤러, 신호처리장치 및 영상처리장치로 구성되며, 체계 구성도와 구성품 블록선도는 (그림 12) 및 (그림 13)과 같다.
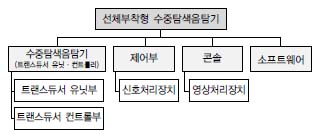
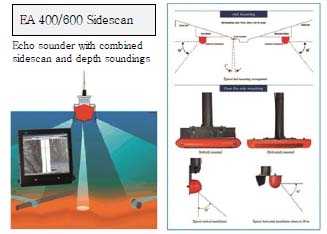
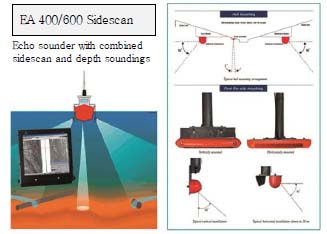
주요 형상 및 특성으로서 센서인 트랜스듀서는 다중빔을 사용함으로써 고속운항에서도 단일빔과 동급이상의 향상된 해상도를 획득하고, 고속으로 장비 운용 시 수중탐색 데이터를 효과적으로 획득하며, 탐사/탐색 시간을 크게 단축할 수 있다. 컨트롤러는 트랜스듀서의 초음파 송/수신 신호를 제어하는 역할을 수행하고, 각 보드 및 트랜스듀서에 전원공급, 초음파 신호 송신/수신 신호 증폭 및 다채널 송수신 고속 통신을 수행한다. 신호처리장치는 초음파 수신 데이터를 전송 받아 하드웨어적인 필터링을 통해 신호를 복원하고 필요한 데이터 추출과 다채널 전송데이터 복원 및 고속신호처리를 수행한다. 영상처리장치는 신호처리장치에서 복원된 신호를 영상화하는 기능을 수행하고, 신호처리장치와 LAN을 통해 통신하며 데이터 영상화, 장치 구동을 위한 각종 명령 송수신, 항적 및 정보 표시와 모자이크 기능을 수행한다. (그림 14)와 (그림 15)는 해양장비의 대표격인 노르웨이 콩스버그마린에서 필요에 따라 선체에 부착하여 사용하는 선저부착형 측면주사 음탐기의 사용 사례를 보여주고 있다.

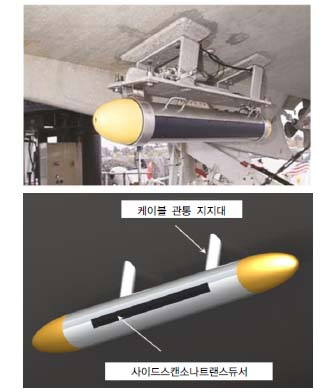
(그림 16)은 국내 음탐기 제작 전문업체인 (주)소나테크의 선저부착형 측면주사 음탐기의 개발 시제품에 대한 사례를 보여준다.
3. SAS(Synthetic Aperture SONAR)
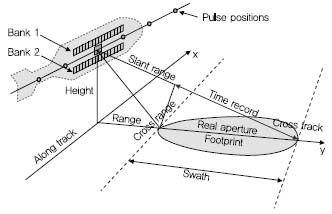
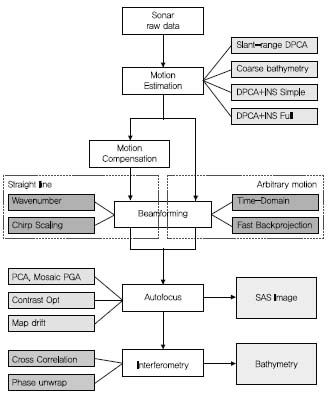
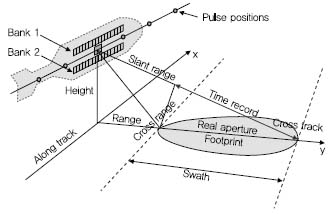
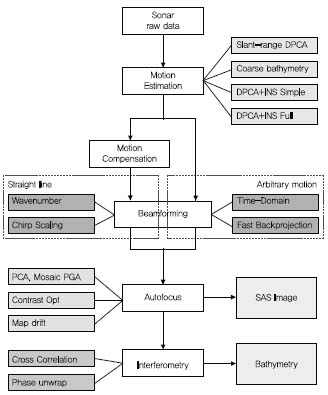
합성개구면소나는 수중의 물체를 원거리에서도 고해상도의 영상을 얻을 수 있는 기술이다. 측면주사 음탐기는 해저의 일정 지점에서 단일 신호를 송수신하지만 항공기의 SAR처럼 SAS는 앞으로 움직여 나가면서 동일한 지점을 반복적으로 탐색하면 개구면이 커져서 작은 물체에 대한 고해상도 영상을 얻을 수 있다(그림 17, 18) 참조). SAS 신호처리는 UUV등에서 운용되기 때문에 소나 신호처리를 용이하게 하기 위해서는 집적도가 높은 저전력 소모의 플랫폼이 요구된다. 이를 위해서 많은 연산량이 요구 되는 SAS의 핵심 신호처리 모듈인 빔 형성기 구현기술은 차기 핵심기술 확보를 위한 중요한 요소이다. 고해상도의 SAS 영상을 얻기 위해서는 Synthetic Aperture의 형상을 정확하게 얻는 것이 필수 적이다. 물속에서 운동체는 원하지 않는 방향으로 움직이기 때문에 운동체의 정확한 motion estimation을 얻기 위해 acoustic micronavigation 에 결합된 INS 시스템을 채택한다. SAS 신호처리는 광대역 소나 plse를 사용하기 때문에 mtched filter를 사용하여 거리, 방위 분해능을 얻는다. 전형적인 SAS의 개념은 (그림 19)와 같다.

합성개구면소나(SAS)의 신호처리 개념을 살펴보면 96개의 센서 엘레멘트로 구성된 2개의 along-track receiver array와 pased array transmitter(4×5)로 구성된다. 센서로부터 수신된 핑 신호를 실시간으로 수신하고 aousticmcronavigation 데이터를 수신하여 합성 개구면소나 빔 형성 처리를 하여 영상을 획득하게 된다. (그림 19)는 합성개구면소나의 신호처리 개념을 블록선 도로 나타내고 있다.
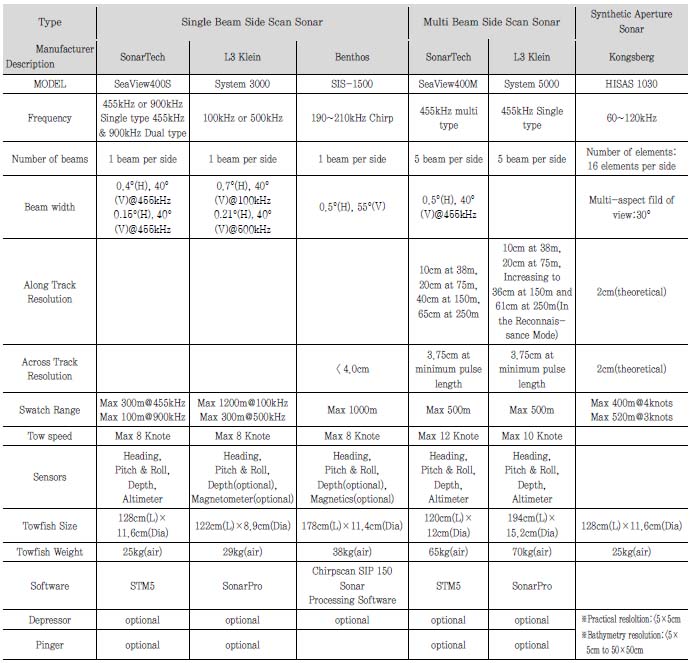
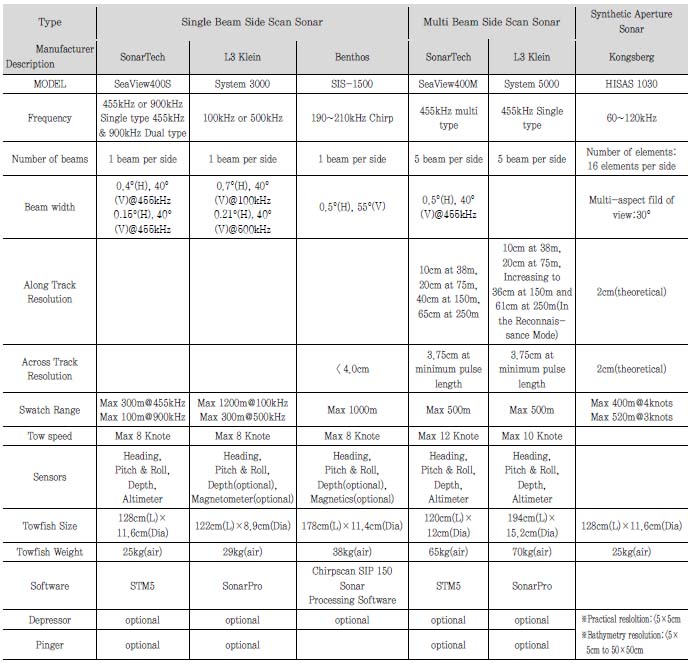
다음<표 2>의 제품들은 모두 수중탐색용 측면주사 음탐기의 특성을 갖는 장비 사양들이다. 국외의 경우 미국의 L3 Klein사와 노르웨이 Kongsberg사가 대표적이며, 국내의 경우 single beam/multi beam side scan sonar 생산업체는 대우조선해양(주), (주)소나테크 등에서 생산하고 있다.
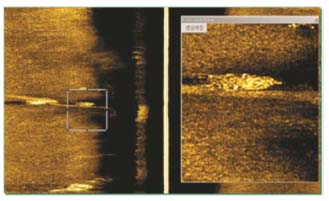
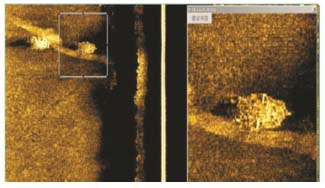
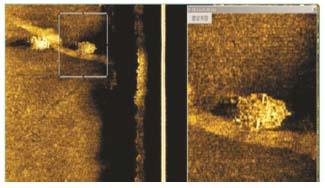
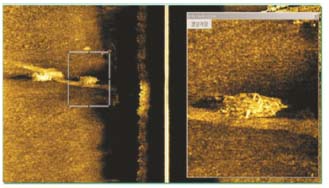
(그림 20)과 (그림 21)은 탐색 범위에 따른 다중빔 영상에 대한 해상도를 비교하여 보여주고 있다.
• Single Beam & Multi Beam 영상 비교
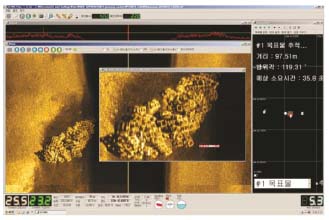
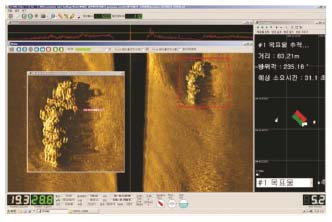
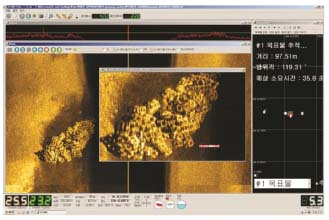
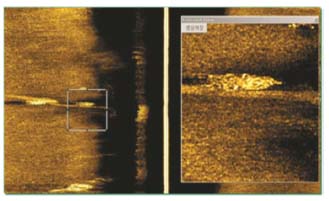
(그림 22) ∼ (그림 24)는 동일 물체에 대하여 single beam과 multi beam의 영상을 비교한 결과를 보여주고 있다.
IV. 맺음말
측면주사음탐기(side scan sonar) 기술은 해저면의 영상을 실시간으로 탐색하는 장비로서 높은 해상도를 바탕으로 해양탐사 및 지질조사, 해저통신 및 어초조사, 기뢰 및 잠수정 탐색 등 해양탐사와 관련한 대표적 장비로써, 폭넓은 산업 분야에 응용되는 기술로 발전하고 있다. 현재 국내에서는 측면주사음탐기 센서 관련 핵심 기술의 확보가 미흡한 수준이므로 선진국과의 기술 간격을 좁히고 향후 고부가 수중음향 센서 시장의 선점을 위하여 이 분야에 대한 적극적인 관심과 연구개발을 위한 투자가 필요한 시기라고 판단된다. 특히, 합성개구면소나(SAS)는 국내 개발사례가 없고 원천기술이 매우 취약한 분야이므로 이에 대한 체계적인 연구개발 전략이 필요할 것이다. 본고에서는 미래에 새로운 시장 창출이 가능할 것으로 예상되는 수중 측면주사음탐기 센서 기술의 이해를 돕고자 측면주사 음탐기 센서의 기본 구성 및 원리부터 최근 응용 분야에 이르기까지 기술개발 동향에 대하여 요약하였다.
용어해설
Side Scan Sonar 측면주사 음탐기는 수중에서 수 Cm부터 수백 m 크기의 물체까지 정확히 식별할 수 있는 기술로 소나는 평행선 측선을 따라 예인 되며, 각 스와스(Swath)는 중첩이 가능하다. 이 같은 방법으로 넓은 지역을 짧은 시간 내에 효과적으로 조사할 수 있는 기술
Towfish 변환기와 신호 조절 회로를 포함하고 있는 수중 감지장치로서 펄스신호를 수중으로 발사하고 반사된 신호를 받아들이는 역할을 수행하며, 케이블에 의해 선상의 레코더와 연결하여 영상을 획득할 수 있는 기술
Synthetic Aperture Sonar(SAS) 합성개구면소나로 명명되며, 수중의 물체를 원거리에서도 고해상도의 영상을 얻을 수 있는 기술임. 측면주사 음탐기는 해저의 일정 지점에서 단일 신호를 송수신하지만, 앞으로 움직여 나가면서 동일한 지점을 반복적으로 탐색하면 개구면이 커져서 작은 물체에 대한 고해상도 영상을 얻는 기술
약어 정리
GPS Global Positioning System
OTG Over-The-Ground
PZT Piezoelectric element
ROV Remotely Operated Vehicle
SAS Synthetic Aperture Sonar
SSS Side Scan Sonar
TVG Time Varied Gain







- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.