국방 무인‧로봇 핵심 기술동향 및 획득전략
Trends and Acquisition Strategies on Defense Unmanned Robot Core Technology
- 저자
- 계중읍 / 3D인지플랫폼연구실
- 권호
- 29권 3호 (통권 147)
- 논문구분
- 일반 논문
- 페이지
- 118-130
- 발행일자
- 2014.06.01
- DOI
- 10.22648/ETRI.2014.J.290313
- 초록
- 전문 서비스로봇인 국방 무인‧로봇은 무기체계 개발 시, 소요군의 운용개념 미확정, 국내 로봇 기술수준(TRL) 및 기술성숙도 미흡 등으로 무인체계의 소요기획 및 전력화 소요 반영이 되지 않고 장기적인 획득 대안으로 생각하고 있으나, 미국의 미래 전투체계(Future Combat System)에서 보듯이 네트워크 중심전(NCW)으로의 전장 환경변화 등 무인전투체계의 통신 및 소프트웨어(복합체계 공통운용환경(SOSCOE: System of Systems Common Operating Environment))의 중요성은 더욱 커지고 있다. 국가적으로는 국방 무인‧로봇을 시장확산분야로 인식하고 있으며, 그동안 해외 도입 위주의 국방 무인‧로봇 시장에 대한 중요성이 부각되고 있어, 우리나라 창조경제 발전의 견인차 역할로 무인체계 시장의 선점 및 새로운 고용시장을 창출할 수 있는 기반으로 투자를 확대하고 있다. 따라서, 본 논고를 통하여 무인체계에 대한 체계개발 활성화 방안에 기여하기 위한 선제적인 방법으로 연구개발 방향을 설정하고, 기술개발 방향 및 획득 우선순위 등 개발전략을 수립하고 그 대안을 제시하고자 한다.
Share
I. 서론
1. 미래전 양상 및 주변환경 분석
가. 전쟁양상 및 작전수행 변화
최근 전쟁양상은 걸프전과 이라크전의 비교 결과 감시•정찰기술의 발달로 표적탐지율이 향상되었고, C5I1) 기술의 발달로 센서-슈터 간 사이클 속도가 단축되었으며, 정밀유도무기 기술의 발달로 정밀무기의 사용비중이 증대된 것으로 분석되어 전쟁에서 군사과학기술의 중요성이 단적으로 입증되고 있다. 전쟁양상은 최근의 전쟁사례, 위협유형의 다양화, 전쟁수행의 변화를 고려하여 ‘인간적 요소를 중시’하는 작전(국방 무인‧로봇이 대표적 사례)으로 변화되고 있다[1][2].
나. 국방 획득환경 및 정책
국방 획득에 대한 패러다임이 국내 개발, 수출지향, 업체 간 경쟁과 협력 등으로 전환됨에 따라 우수한 민간업체의 국방연구개발사업 참여기회는 크게 확대될 것으로 전망되고, 미래전 양상의 변화와 무기체계 전력소요 증가에 따라 향후 무인‧로봇체계 분야의 사업기회가 크게 증대될 전망이다. 또한, 국방 획득 패러다임이 국내 개발, 개방 및 경쟁 촉진 등으로 변화됨에 따라 소프트웨어 및 하드웨어의 원천기술을 보유한 기관들의 국방 무인‧로봇 시장 진입기회는 크게 확대될 것으로 예상된다.
II. 국방 무인‧로봇 핵심 기술동향
1. 대상 체계 및 목표 기술
가. 필요성
국방 무인‧로봇은 왜 필요한가? 라는 질문에 답변이 쉽지는 않을 것이다. 우선 1만km 떨어진 곳에서도 원격조종 기능으로 아군의 인명 손실 방지가 가능하다. 인명 손실 없는 전쟁수행으로 국민에 대한 정치적 부담 감소, 실시간 감시/정찰 및 공격으로 전쟁의 불확실성 해소가 가능하다. 또한, 위험지역 내 작전 및 화생방 탐지/분석과 불가능한 장기간/지속적 작전수행이 가능한 유인전투체계 등 3D(Dangerous, Dirty, Dull) 전장 임무수행이 가능하다. 정규전과 비정규전을 동시 수행(Hybrid Warfare)하고 긴장 고조 시 적 영해 및 영공 내 침투작전으로 적 공격 징후 포착 시 또는 공격 시 즉각 대응공격이 가능하다. 그러므로 실시간/지속적 감시정찰 공격으로 인명 손실 없는 전쟁수행이 가능하다[2].
나. 대상 체계
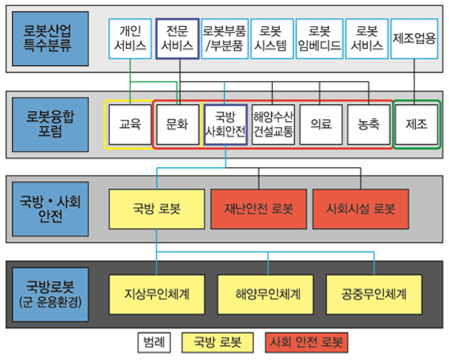
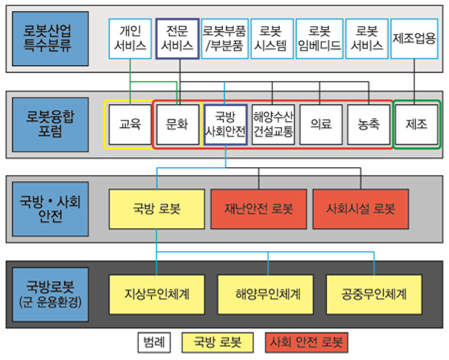
국방 무인‧로봇은 운용환경에 따라 지상 무인‧로봇체계인 UGS(Unmanned Ground System), 해양 무인‧로봇체계인 UMS(Unmanned Maritime System) 및 공중 무인‧로봇체계인 UAS(Unmanned Aerial System)로 구분할 수 있으며, 이는 로봇 전체분야로는 전문 서비스 영역에서 다룰 수 있다. (그림 1)은 산업통상자원부가 운영 중인 로봇융합포럼의 서비스로봇에 대한 운영방안을 보여주고 있다[3].
다. 목표 기술
국방 무인‧로봇은 운용체계를 비롯하여 통신, 자율제어(자율주행, 자율운항, 자율비행) 기술 등 주요기술로 구성되며, (그림 2)는 국방 무인‧로봇의 목표기술에 대한 요소 기술을 나타내고 있다. 이러한 주요 기술은 자동화를 위한 인공지능을 목표로 장애물 회피, 최적 비행경로 자율 설정, 자율 기동, 고장진단 및 제어기술과 제반 센서 요소 기술, 정보융합기술 및 작전지역 내 제반 작전요소와의 통신 및 Data Link 기술 등이 있으며, 특히 유인 및 무인전투체계와의 협력작전으로 상호 원격통제 및 공격에 대한 시너지를 확보할 수 있다[2].

2. 지상 무인‧로봇체계
가. 운용개념
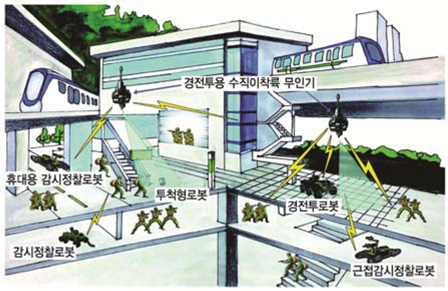
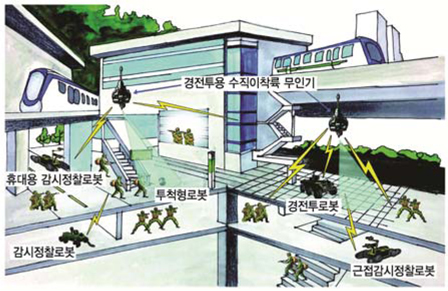
지상체계는 전술 C4I체계와의 연동을 통해 위성, 레이더, 항공기, 헬기 등 광역 감시수단으로부터의 전장정보를 공유하고, 소형 무인기, 감시정찰 로봇, 개인 전투체계 등의 감시수단으로부터 작전지역 내 전장정보를 전술 네트워크 기반에서 실시간 인식함으로써, 동시․통합전을 수행하고, 네트워크 수단에 의해 무인-무인, 무인-유인 등으로 상호 네트워킹과 지휘통제 플랫폼에 연계 운용되어 유‧무인 전투수단과 네트워크 기반 인간중심의 지휘통제하에 지상 무인 전투체계를 운용한다((그림 3) 참조).
자주포 등 원거리 타격체계는 위성, 무인기로부터의 표적정보를 이용하여 자동으로 사격제원을 산출하고, 인공지능탄을 보다 원거리에서 발사하며, 표적 손상정도를 영상이미지탄으로부터 전송받아 판단하는 효과중심의 능동적 사격임무를 수행함으로써, 적 종심공격, 대 화력전, 보병부대 직접지원 등의 임무를 수행한다.
인명피해를 최소화하면서 최대효과를 달성할 수 있도록 운용하며, 협소지역 정찰 등 인간이 임무를 수행하기에는 매우 제한된 분야에 휴대용, 초소형 및 생체모방형 무인장비를 투입하여 운용하는 등 인간의 기능과 능력을 병행 대체 운용한다. 이를 통해 신뢰성 유지 및 시너지 효과를 추구하고, 소형 무인기, 감시정찰 로봇 등 감시정찰 수단을 최선단에 배치하여 적 정보를 입수하며 전술 네트워크를 통해 공유하여, 작전지역 내 지상/항공 감시정찰, 정밀타격의 Sensor-to-Shooter 임무 수행으로 자주포 등 원거리 타격체계와의 통합 기반 전투를 수행한다[4].
미래의 지상 무인전투체계 기반 무기체계는 네트워크로 결합하여 감시정찰 기능을 가지는 공중의 무인기와 지상의 감시정찰 로봇이 전투선단에서 표적을 획득하고, 후방의 안전한 곳에는 지휘통제 차량이 위치하며 전투선단에는 직사탄‧미사일 사격이 가능한 중 전투로봇과 비교적 안전한 곳에는 직사/곡사/미사일/소모성 무인기까지 포함한 다목적 탄 발사가 가능한 다목적 화력로봇이 위치하여 운영될 것으로 예상된다.
시가전‧테러전을 포함한 특수전에도 지상 무인전투체계가 활용될 것으로 예상되며, 개인 혹은 소대의 감시정찰을 위해 공중에서는 수직 이착륙 무인기를 운용하고 지상에서는 근거리 감시정찰 로봇을 운용하며, 개인병사가 휴대하면서 특수지역을 감시‧정찰하는 휴대형 감시‧정찰 로봇, 중화기 발사가 가능한 경전투 로봇 등 다양한 무인체계가 운영될 것으로 예상된다. 또한 지뢰는 적 기동차량의 이동로에 차량 또는 수동으로 지상에 지뢰를 설치하여 원격 무선통신으로 운영한다.
나. 네트워크 구조
1) 미국의 미래 전투체계(FCS)
• FCS(Future Combat System) 네트워크 구조
미래의 네트워크 중심 전장(NCW: Network Centric Warfare) 환경에서 각 전투단위가 개별적으로 가지는 방호력 및 타격능력을 극대화하기 위해서는 작전임무를 수행하는 각각의 구성단위들을 하나의 통신망으로 연결하여 각 단위가 수집/획득한 정보를 신속하게 공유하고, 이를 기반으로 하여 전장상황에 최적으로 부합하는 분산, 협력된 임무계획 및 임무수행을 실시하여(Don't Fight Alone!) 네트워크 기반 생존성을 고려해야함[5].
- FCS는 네트워크 기반의 복합무기체계(System of Systems)로 비교적 경량의 유/무인 지상차량과 무인기에 대한 지휘통제, 사격, 전송, 감시정찰 등에 관한 기능을 갖으며, 주요 특징으로는 분산, 협력계획 및 임무수행 체계, 자가 구성, 이동형, 통합 네트워크 및 최저 전술 레벨까지 가용한 감시정찰(ISR) 체계로 구분될 수 있음.
• FCS 망의 표준 체계 및 구조
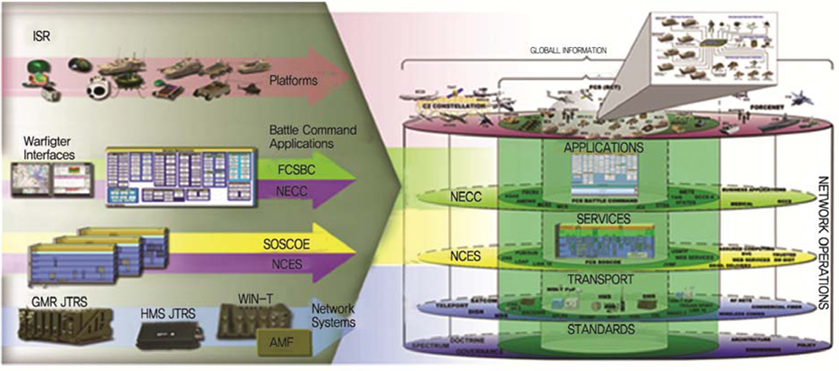
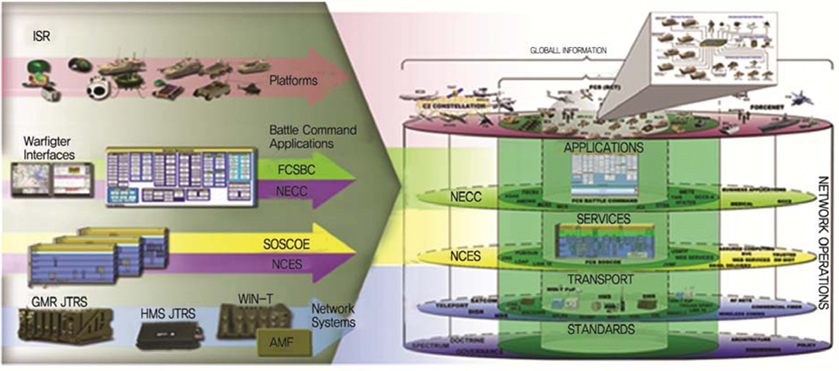
- FCS 프로그램의 전역망(GIG: Global Information Grid)에서 LANDWARNET 기반의 표준-전송-서비스-응용-센서로 연계되는 계층별 구조를 나타내고 있으며, 네트워크 기반 FCS 시스템의 주요 구성 요소라 할 수 있는 통신, 프로토콜 및 무전기에 관한 내용을 살펴보면, FCS의 궁극적인 목표는 네트워크화된 C4ISR 체계를 통해 기동성, 통신 능력, 신속성, 상황 인식능력, 생존성 등을 고도화하는 것이며, 이를 위해서는 광범위하고, 진화된 무선통신 네트워크가 요구된다. (그림 4)는 FCS 망의 표준체계 및 구조를 나타냄.
2) 국내 유‧무인체계 네트워크 운용개념
현재 무기체계 관련 네트워크는 TICN(Tactical Information Communication Network, 전술정보통신체계)과 연동하며 무인장비의 원격제어, 대용량 영상정보의 실시간 전파를 위한 이동전술제어망이 운영된다[2].
- 무인 전투체계 제어망과 무인감시, 무인감지 장비 간 연동과 비가시선 영역의 통신 사각지역을 해소하고 지형적인 제한요소를 극복하여 단절없는 네트워크 제공을 위한 무인중계기를 운영함.
- 유‧무인 전투체계 간 네트워크화된 지휘통제 체계를 운영하고, 무인전투 통제체계와 C4I체계 간 연동을 통하여 음성, 화상 및 데이터 형태로 전술정보를 접수 및 분석하여 지‧해‧공군과 정보공유 및 유‧무인 감시, 지휘통제, 타격전력 간 전술정보의 실시간 연동을 위한 데이터링크(Data-Link)체계를 운영함.
- 지상-해상-공중 간 전술데이터링크체계를 통한 전술정보를 연동하고, 지휘통제는 인간이 주 임무를 수행하고, 무인체계는 인간을 보조하는 수단으로 활용하며, 합리적 의사결정 및 지휘통제를 위한 표적 식별/인식장치를 운영함.
다. 기술발전 추세
1) 체계분야
소형 감시정찰 로봇은 미국의 i-Robot사 Packbot 계열이 대표적인 로봇으로 현재 3,000대 이상 생산되어 아프가니스탄전과 이라크전 미군에 투입되어 활용 중이며, 주로 경계 시 감시정찰 목적의 견마로봇은 이스라엘의 Avantguard, Guardium 등이 긴급 개발되어 국경지역 감시정찰용으로 배치/활용 중이며, 미국의 MDARS-E는 시설감시 및 침입탐지 목적으로 개발, 시험평가를 완료하여 실전에 배치되어 있고, 그 외 로봇은 미국이 차기 변경된 JRP(Joint Robotics Program) 체계개발 계획에 포함되어 2015년 전력화를 목표로 개발 중이다.
2) 감지센서
미국 등 선진국에서 쌍안영상센서, 라이다, 수목관통 레이더, 충돌방지 레이더 등 다중센서 기반으로 센서 특징을 융합하여 정보를 감지하고 있으며, 고감도 CCD, 비냉각 IR, 2D/3D 라이다, 수목관통 레이다, 충돌방지 레이더 등 다중센서 기반의 지형 감지기술 및 다중밴드 플래쉬 라이다 설계기술과 초광대역(UWB: Ultra-WideBand)센서, 중성자(고속중성자 및 열중성자)센서 및 센서 융합으로 금속/비금속 지뢰탐지 기술이 요구된다.
3) 인식 및 처리
다중영상센서, 다중레이저, RF센서 기반의 다중밴드 인식, 융합하는 기술과 인식 후 분류된 결과를 융합하여 통합하는 기술을 연구 중이며, 야지 자율주행을 위하여 다양한 지형/지물을 인식하고 목적에 맞도록 분류하고 융합하여 최종 자율주행 및 임무 목적용 인식 맵을 제작하는 기술이 필요하고, 자동탐지/인식/추적을 기반으로 표적(전투차량, 항공기, 건물 등)처리 지능화기술과 가시광선 또는 적외선 영역의 초분광센서를 활용하여 은폐 또는 위장 표적탐지 및 인식기술이 요구되며, 또한 기존에 D/B형태로 장착하고 있는 DEM(Digital Evaluation Map) 및 벡터지도를 기반으로 상호 매칭하면서 실시간으로 주행 및 인식지도를 작성하는 월드모델링 기술이 요구된다.
4) 임무 및 통제
다양한 로봇이 운용되는 도메인에서 상호 동작제어, 운용 S/W 공유 등의 기술과 3차원 상황 도시기술, 지형정보와 결합하여 지도정보를 전시하는 실시간 전투 판단 및 통제기술 등이 연구되고 있으며, 임무계획 수립, 분석 및 통제하는 기술과 다중로봇의 상호운용 및 정보전시기술이 필요하고, 전투차량의 위치 및 기동진로 식별을 위하여 전장의 입체 지형 영상정보를 실시간으로 합성하고 이를 기반으로 각종 운용 및 전투상황 도시기술이 요구된다.
5) 자율제어
자율의 수준을 나타내는 척도로 4단계의 10가지 자율수준(자율화 기술수준 추세)으로 세분화되며, 원격제어단계는 무선 혹은 유선기반으로 원격의 운용자가 무인‧로봇을 가시권 및 비가시권에서 제어하는 단계를 의미하고, 반자율단계는 정해진 경로를 주행하는 경로주행, 비교적 지역경로 범위를 보다 먼 곳의 기동점 기반으로 주행하는 기동점주행, 정해진 경로가 없는 상태에서 임무 기동점을 주행하는 목표점주행으로 세분화되며, 자율단계 및 협동/협력단계는 기술의 난이도가 대단히 높아서 기술적 도전이 필요한 단계로, 현재 자율/제어 기술의 선두주자인 미국은 자율레벨 6의 기술수준을 확보하고 있는 것으로 판단된다.
미 육군은 미래 전투체계(Future Combat System) 개발사업을 통해 실용화를 추진하였다. 예를 들면, FCS 사업에 포함된 대표적인 지상 무인전투체계인 MULE (Multifunction, Utilities, Logistics and Equipment)은 보병의 장비를 운반하고 근거리 무인전투를 수행하며 지뢰를 탐지하는 등의 기능을 포함하고 있는 장비로 자율레벨 6을 목표로 개발하였으며, ARV(Armed Robotic Vehicle)는 중전투 수행을 목적으로 하는 장비로 자율레벨 7을 목표로 개발을 추진하였으며, 국내에서 민군겸용 기술개발과제로 추진되었던 견마로봇은 상기 MULE과 ARV를 벤치마킹한 대표적 사례로 볼 수 있다.
- 다중센서를 기반으로 기지의 정보를 활용하여 복잡한 지형/지물 및 환경조건을 극복하며 사람이 운전하는 속도와 대등한 수준의 자율/제어 능력과 보병 및 특수부대가 활용 가능한 휴대형 감시정찰 로봇을 활용하여 수색정찰, 시가전등 위험지역에서 원격제어를 기반으로 침투 후 작전 간 긴급상황에서 자율복귀 주행능력의 필요성이 생존성 측면에서 요구되며, 건물내부 등 특수지역에 투척 후 신속이동을 위하여 다양한 임무를 위한 자세나 임무수행에 적절한 임무장비의 자율제어 기술능력이 필요함.
- 유무인 복합체계의 자율적인 통제 및 임무 수행, 통합 상황인식, 계획 및 준비, 정보관리의 최적 수행을 위해서는 유무인 체계에 공통으로 포함되는 WMI 기반의 공통 운용환경(SOSCOE)으로 통합 운용/제어 기술과 근접 지상작전이나 특수작전 수행 시 차량에서 수직 이륙하여 병사 대신 근거리 감시정찰, 미확인 시설의 수색정찰 및 유․무인 차량 간의 통신중계 등을 위한 영상 유도제어 기술능력이 요구됨.
6) 통신/통신망
전술 무선통신의 성능을 저해하는 다양한 전파간섭 및 장애요소가 존재하는 야지환경에서 고속의 데이터 전송을 위한 강인한 변복조방식, 채널 코딩방식, 시공간 다중화 방식, 항재밍 저피탐방식 및 다중접속 등의 기술을 기반으로 하여 기반 구조에 무의존적이며 동적 토폴로지(topology) 변화에 강인한 자율/적응형 Ad-hoc 네트워킹 분야 기술 및 초광대역 무선 인지/적응 네트워킹기술이 요구된다.
3. 해양 무인‧로봇체계
가. 운용개념
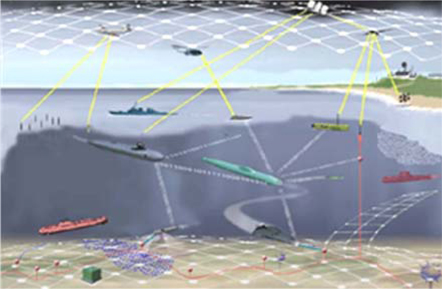
1) 무인잠수정(UUV)
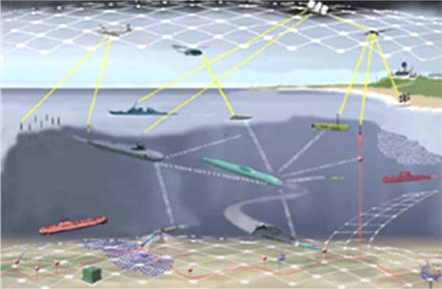
전시 및 평화 시 기존의 잠수함이나 전투함정의 작전이 어려운 연안지역 및 분쟁지역에 은밀한 정보/감시/정찰 임무를 수행하며, 적 연안에서 은밀히 침투하여 기뢰탐색 작전 수행 및 상륙작전 시 아함정의 Q-route Survey 임무수행이 가능하도록 운용되고, 전천후 잠수함 탐색을 위한 대잠전(ASW, Anti-Submarine Warfare) 임무수행 및 수중노드로 모함과 연계된 네트워크 정보중계기로 운용될 것이며, (그림 5)는 해군의 무인잠수정 및 무인수상정 운용개념을 나타내고 있다. 상륙작전, 특수전 요원 및 잠수함에 위치정보 제공 등으로 항해 지원 및 다른 항법 시스템 간에 통신링크를 제공하고, 잠수함이나 수상함정이 접근하기 어려울 때 항구나 연안에 은밀히 침투하여 군사작전에 필요한 해양환경 자료를 획득하도록 운용될 것이며, 전천후 수송이 가능한 수중 무인 운반 및 특수전 요원에게 물자보급 임무를 수행하며, 적 함정이나 잠수함에게 허위정보 제공으로 기만작전을 수행하거나 위험작전 지역에서 적 함정 출현을 경보하는 노드로 정보작전을 수행하고, 초공동무기(Super- Cavitation Weapon) 또는 고속어뢰 등의 무장 탑재로 적 잠수함/함정을 무력화할 것이며, 기타 해난사고 시 수중탐색 및 구조활동 지원장비로 운용될 것이다[6].
2) 무인수상정(USV)
상륙작전 시 연안의 기뢰탐색 및 처리 등을 위한 대기뢰전 수행 및 주요 항만방어, 함정보호를 위한 주야간 정찰/감시 임무수행과 함상에 안정화된 소구경 기관포, 유도탄 및 소형 고속어뢰 등의 무장 탑재로 연안에서 대함전, 대잠전 임무를 수행하고, 특정한 위험작전 지역에서 인명 및 함정보호를 위한 해상초계 임무를 수행하고, 연안으로 침투, 착저해 있는 적 잠수함 탐색을 위한 제한된 대잠전 임무를 수행하며, 기타 적의 항적추적어뢰 등의 공격 및 유도탄 공격에 대한 아함정 보호를 위한 기만기로 운용될 것이다.
나. 기술발전 추세
1) 체계 분야
체계분야에서 에너지원은 수중 장기체재를 위한 에너지원으로 Li 계열의 2차 전지, 고분자 전해질 연료전지, 폐회로 추진엔진(디젤엔진, 스털링 엔진 등) 등이 개발되고 있으며, 소형 UUV 경우 2차 전지를 적용하고 대형 UUV 경우 연료전지나 폐회로 추진엔진 등이 연구개발되고 있는 추세이고, 탑재되는 무장은 소구경 기관포(7.62mm, 12.7mm 등), Hellfire 같은 유도탄을 탑재하며, 수중공격을 위한 소형 고속어뢰 등을 고려하고 있으며, 고속 기동하면서 정확한 표적추적, 함포사격 및 유도탄 유도능력을 보유하기 위한 무장 안정화 능력 및 사격통제 기술이 연구되고 있다.
2) 자율제어 및 추진제어
자율제어는 UUV의 정찰감시(ISR), 대기뢰전(MCM: Mine Counter Measure), 대잠전(ASW) 등의 다양한 임무를 자율적으로 수행하기 위하여 자율(autonomy)제어 기술이 활발히 연구개발되고 있으며, 실제로 UUV가 임무를 수행하는 동안 모함과 지속적으로 통신 연결상태를 유지하는 것은 매우 어렵기 때문에 다른 무인체계(USV, UAV, UGV)보다 높은 자율제어 수준이 요구되고 있으며, 미국 MRUUV의 경우 자율제어 8 수준으로 개발 중에 있고, 도킹 및 회수는 회수를 위하여 모함과 UUV 간에 유체력 상호간섭에 따른 안정영역 규명과 함께 수중에서 정밀한 도킹기술이 연구개발되고 있으며, 도킹 후에 잠수사의 지원 없이 잠수함의 어뢰발사관으로 회수하기 위하여 로봇팔 또는 소형 ROV를 이용하는 자동화 기술들이 연구개발되고 있다. 추진장치는 저속으로 기동 시 양호한 조종성 및 제어특성을 갖도록 하는 제어판을 고속 추진기 후류에 설치함으로써 제어판의 타효(effectiveness)를 극대화한 일체형 추진장치(IMP: Integrated Motor & Propulsor)가 연구개발되고 있으며 항법기술은 UUV가 장시간 운행 시 현재의 위치를 정확하게 파악하기 위해서 기존의 EM-로거(Electro-Magnetic logger) 대신에 도플러 속도 로거(Doppler Velocity Logger)를 사용하여 조류에 따른 오차를 최소화하고, 필요시 부상하여 GPS로 보정하는 소형 고정밀 수중종합항법기술이 연구개발되고 있다.
3) 탐지 및 무장 분야
탐지 및 무장체계분야에서 통신은 수중/수상 네트워크와 연결되어 수상항해 시 RF 또는 위성통신, 수중항해 시 수중통신 및 광케이블통신 등을 이용하며, 특히 수중통신의 통달거리는 수중환경에 따라 다르지만 약 10m 근방(최대 30km까지), 통신속도는 10kbps 정도(최대 20kbps)이다. 수중통신의 경우 원거리 고속통신 및 적에게 탐지 되지 않도록 은밀성을 강구하고 있으며, 탐지센서는 성능향상을 위하여 원거리 고분해능의 합성개구면소나(SAS)가 개발 및 적용되고 있으며, 미래 전투용 UUV를 위하여 선체 외부 표면을 센서로 활용하는 일명 Smart Skin 음향센서가 개발되고 있다. 기타 해난사고 시 기름유출 등을 탐지하는 화학센서도 연구개발되고 있고, 소나센서의 신호처리 기술은 자동으로 표적탐지, 분류 및 식별을 위한 신호처리 기술이 연구개발 되고 있으며, 또한 무장체계는 근접하여 공격하거나 병목점(Choke Point)에서 대기하다가 조우시 공격하여 적 함정/잠수함을 무력화할 수 있는 200노트 이상의 초공동무기(Super-Cavi-tation Weapon)가 연구개발되고 있다[7].
4. 공중 무인‧로봇체계
가. 운용개념
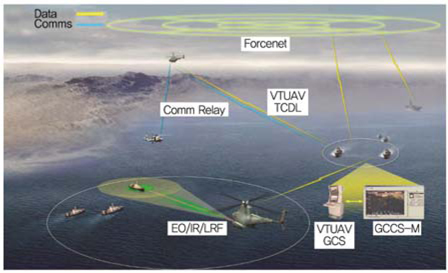
1) 감시‧정찰 무인항공기(UAV)
최근 북한 정찰용 무인항공기의 침투를 계기로 국내 무인항공기의 방어체계가 이슈화되어 이에 대한 대비가 요구되는 시점이다. 감시정찰 무인체계의 대형화, 고성능화 추세에 따라 향후에는 45,000ft 이상의 비행운용 고도를 목표로 하는 중고도 정찰무인기가 운용될 것이며, 또한 광역 전장감시 및 징후감시를 위하여 고해상 영상장비 및 고속 광대역 데이터링크 기능을 갖춘 고고도(65,000ft 이상) 장기체공(40시간 이상) 정찰 무인기를 전략급 정찰 무인체계로 운용하며, (그림 6)은 감시정찰 무인항공기(UAV) 운용개념을 보여준다.

2) 무인전투기(UCAV)
무인전투기체계는 소형․경량화 고정밀 무장을 탑재하고 SEAD, 지상 공격임무를 단독 또는 유인기와의 협동 개념으로 운용될 전망이며, 무인화, 단순화로 획득비의 대폭 절감이 가능하며, 평시에는 장기 저장하고 모의비행 훈련을 수행하고 전시에는 공중전력으로 집중운용이 가능토록 운용되고, 기술적 한계로 최초에는 유인 전투기 수행 시 가장 위험한 임무인 대공망 제압이 무인전투기의 우선적인 임무이지만 궁극적으로는 모든 전자전 공격임무와 정밀, 전천후 타격임무를 수행할 수 있는 다목적 무인전투기로 발전될 것으로 예상된다.
나. 기술발전 추세
1) 데이터링크 시스템
데이터링크시스템은 무인항공기에 장착된 EO/IR, SAR 등의 임무장비로부터 영상정보를 획득하여 지상장비로 데이터를 전송하는 것이 주 임무이며, 이 때 지상장비와 무인항공기 사이에서 데이터의 압축, 변복조, 송수신 등을 수행하는 일련의 서브시스템들을 데이터링크(Data Link)라 칭하고, 데이터링크는 상향(Uplink) 및 하향링크(Downlink)로 구성되며 상향링크는 비행체 및 탑재장비 제어명령(TC: Telecommand)을 지상에서 무인항공기로 전송하고, 하향링크는 무인항공기 상태데이터(TM: Telemetry)와 EO/IR, SAR 장비 등을 통하여 수집한 영상데이터를 지상으로 전송하며, 신호정보 수집, 고해상도 영상정보 획득과 같은 임무장비의 발전 및 다수의 무인기 운용 필요성에 따라 고속 데이터링크기술과 동적 네트워킹기술이 필요하다. 무인전투기의 경우는 적의 감청 및 방탐장비에 탐지되지 않도록 하는 저피탐성이 요구되고, 무장 탑재 무인기로 항상 통신이 연결될 수 있도록 위성통신을 포함한 다중화 통신시스템이 구성되어야 하며, 무인전투기 간의 local 네트워크는 유인기와의 협동작전 및 ISR, C2체계와의 연결을 위해 전술 데이터링크와 같은 외부체계 네트워크와 상호운용이 가능토록 개발하여야 한다.
2) 체계 분야
비행통제장비 1대로 1기의 무인기만을 통제할 수 있었으나, 미래의 무인기체계는 운용 편의성, 자율화운용 추구 등의 발전방향에 따라 다수 무인기의 동시 제어기술과 이를 위한 주파수 할당, 운용로직 및 복수 무인기 실시간 통제기술이 필요하고, 임무계획에서는 표적의 획득 및 무력화를 위해 어떤 임무장비를 탑재해야 하는가를 결정해야 하고, 임무 비행거리에 따라 주입하여야 할 연료량 등의 결정이 필요하며, 이러한 임무계획과정은 매우 복잡한 의사결정 단계이므로 오류를 줄이고 최적의 임무 계획을 수립할 수 있는 지능화 임무계획기술이 필요하나, 임무 계획은 비행 전에만 이루어지는 것은 아니므로 비행 중에도 표적의 변경, 전장환경의 변화 등에 따라 임무계획을 동적으로 변경하는 경우가 발생하므로 자율비행 제어기술이 필요하다.
3) 스텔스 분야
스텔스비행체 기술은 저피탐을 위한 무미익 형상은 일반적으로 비행안정성이 저하되고, 조종성도 양호하지 못하므로 신속한 응답성을 가지는 FBW(Fly-By-Wire) 수준의 비행제어계통이 필요하며, 무장 탑재 항공기로써의 신뢰성 확보를 위해 항공전자, 비행제어 등 주요 계통의 다중화는 필수적 요소로 비행체는 복합재를 기본으로 RAM과 RAS를 응용하여, 외피의 이음매를 최소화하여 개발되어야 하고, 비행체에 부착되는 모든 안테나는 레이더 전파에 대해 거울과 같이 반사하게 되므로, 이러한 레이더 반사신호 감소를 위해 비행체 외피와 일체화된 배열 안테나를 사용하거나, 사용 주파수는 투과하고 적 레이더 전파는 반사 또는 흡수하는 레이돔이 필요하며, 무장 외부 장착 시에는 매우 큰 레이더 반사신호를 유발하므로 무장을 내장하고 사출, 발사할 수 있는 기술이 필요하다. 무인전투기는 평시 장기보관하며 유사시 운용한다는 개념이므로, 무윤활 회전부 등을 채용하고 의도적으로 한정된 수명의 고효율 엔진개발이 필요하며, 흡∙배기구 레이더 단면적 감소 및 배기구의 적외선 방출 최소화도 요구된다.
4) 무인자율비행 및 임무통제기술
비행체와 지상의 임무통제소로 구성되는 무인전투기체계에서, 비행체와 이격된 임무통제소에서 다수의 무인기를 동시에 운용하는 조종사가 1기만을 통제하면 나머지 편대기는 자율적으로 추종하여 업무부하를 경감하고, 상호 간의 위치 및 시간 간격을 자율제어하여 편대를 구성, 표적 동시타격으로 공격효과를 높이기 위한 동시운용기술이 필요하며, 편대 내 무인전투기 사이나, 유인기와의 협동 운용 또는 민간공역 진입 시의 공중충돌 자동회피기술과, 각 무인전투기가 수집한 정보를 융합, 처리하여 정보의 정확도를 높이고 상황을 인지하는 기술, 인지된 상황에 자율적으로 비행경로나 임무계획을 재수립하는 기술, 계속 변화하는 전술환경 및 편대 구성에서 지속적인 정보교환을 위한 동기화 네트워크 구성기술 및 활주로 상의 운용 및 자동 이착륙기술 등이 필요하다.
5) 센서기술분야
저피탐 센서 및 센서기술은 EO/IR 센서도 광학부 전면의 창을 통해 레이더 전파가 투과, 반사되면 큰 RCS 신호를 형성하므로, 레이더 신호를 반사 또는 흡수토록 표면처리되어 상대적으로 투과도가 저하된 광학창을 이용하는 시스템과 무인전투기에 탑재되는 센서로는 EO/IR, SAR, ESM 등이 있으며, 스텔스 특성을 요구하는 무인전투기에서 이러한 탑재 센서로 인한 피탐성 악화를 방지할 필요가 있으며, 특히 전파를 방사하는 SAR 센서는 선택적 전파투과 레이돔 내에서 안테나를 운용하거나, 비행체 외피에 내장된 낮은 게인의 배열 안테나를 이용하여야 하고, 방출된 전파를 감지당하지 않도록 하는 저피탐모드 기술을 적용한 SAR/MTI 시스템개발이 필요하며, ESM 센서 역시 상대적으로 낮은 게인의 배열안테나를 적용하여야 하며, 동시 운용 중인 타 무인전투기가 획득한 방탐정보를 통합하여 고해상도 정보를 추출할 수 있어야 한다.
III. 국방 무인‧로봇 획득전략
1. 연구개발 추진방안
기술발전 추세에서 살펴본 바와 같이 자율제어, 센서, 통신 및 소프트웨어 분야에 대한 국내 기술력을 비교하여 기술개발 우선순위를 도출하는 전략 수립이 요구된다.
가. 지상 무인‧로봇
미국의 FCS 프로그램에서 보듯이 SOSCOE(System of Systems Common Operating Environment)를 유무인체계에 연계하여 네트워크망 체계를 구축하였고, 이를 바탕으로 상호운용성에 투자한 사항을 알 수 있으므로, 국내 지상 무인전력을 개발하고자 할 경우 상호운용성을 고려한 공통운용환경(COE: Common Operating Environment) 소프트웨어 미들웨어에 대한 개발전략을 수립해야 할 것이다(지상 무인로봇의 네트워크분야 참조). 또한, 자율제어 및 센서기술에 대한 원천기술 개발능력 확보와 함께 민군기술 협력기술 개발방안에 대한 수요 창출이 필요하다.
나. 해양 무인‧로봇
수중항법기술은 기존의 관성항법센서를 기반으로 하는 전통적인 항법기술과 더불어 GPS와 같은 보조장비와 연동된 복합항법기술들이 활용되고 있다. 비전통적인 항법기술로는 해저지형이나 지구중력을 측정하여 이미 데이터베이스화된 해저지형 또는 지구 중력지도와 비교하여 항해하는 해저지형 대조항법 기술이 연구되고 있다. 미 해군의 경우 무인잠수정에 SWARM(Shallow Water Autonomous Reconnaissance Module) 또는 소나센서를 이용하여 해저지형 대조항법기술을 실험 적용한 바 있으며, 전통적인 항법기술로 KRISO와 대양전기의 군사용 MDV인 SAUV 개발과정을 통해 IMU와 SSBL에 의한 수중항법기술을 개발하여 일부 확보된 것으로 판단된다. 비전통적인 수중항법기술은 KRISO가 소형 AUV인 “이심이 100”을 개발하면서 SLAM 기법이 일부 연구된 바 있지만, 아직은 실용화를 위한 연구기반을 다지는 단계라 할 수 있다. 따라서 음향 및 영상기반 지형대조 항법기술과 지구중력 기반 은밀항법기술에 대한 연구가 중장기적으로 수행되어야 할 것이다. 현재, 개방형 및 폐쇄형 선체 설계 및 내압용기 설계 및 제작기술, BLDC형 추진기 기술, 리튬-이온 2차전지 기술, SSS, SBP 등의 센서기술 일부, 수중무선통신기술, ROV 관련 제어기술 등은 선진국에 근접되어 있거나 일부 기술을 확보하고 있으나 대부분의 기술분야들이 해양선진국에 비하여 낙후되어 있으며, 특히 일체형 추진시스템과 복합에너지원 및 고성능 2차전지 등의 추진 및 에너지원 기술, SSS5) 등의 정밀센서기술, 복합항법기술 및 해저지형 대조항법 등의 수중정밀항법기술, 고속 심심도 수중통신기술, UUV용 자율제어기술, 전기모터 기반 매니퓰레이터기술 등은 기술이 확보되어 있지 않거나 기초 연구수준이므로, 이는 국내의 수중로봇 관련 핵심기술에 대한 개발투자의 가능성과 필요성을 동시에 보여주는 사항으로 즉, 선별적으로 특화된 핵심기술에 대한 집중투자와 개발을 통하여 독자적인 핵심기술의 보유를 통한 수중로봇 선진국들과의 협력개발이 요구된다.
다. 공중 무인‧로봇
무인항공기 체계개발(현황)을 살펴보면 중고도 정찰용 무인항공기(MUAV), 사단 정찰용(30km~ 60km) 무인항공기, 소형정찰용 무인항공기, 차기 군단 정찰용 무인항공기, 무인 지상감시센서 개발이 필요하며, 향후 지속적인 수요와 예산반영이 예상된다. 공중분야(무인항공기)의 연구개발 추진 및 참여 전략은 단기적으로는 부족한 센서기술(EO/IR/SAR)을 조기에 국산화하고, 장기적으로는 SW(DDS, RTOS 미들웨어 등)에 대한 기술개발 능력을 확보해야 경쟁력을 갖출 수 있을 것으로 판단된다.
2. 무기체계 및 핵심기술 확보방안
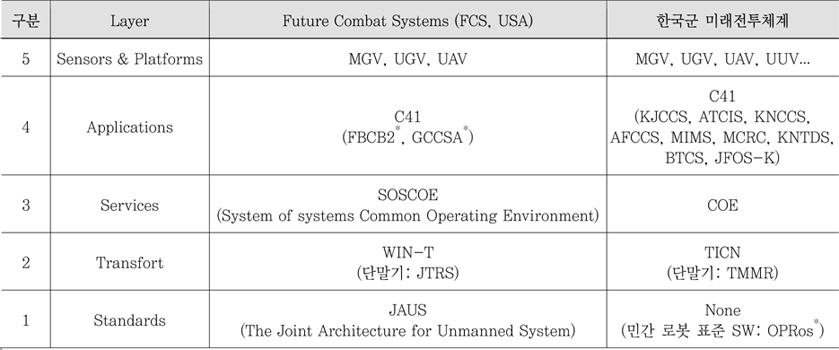
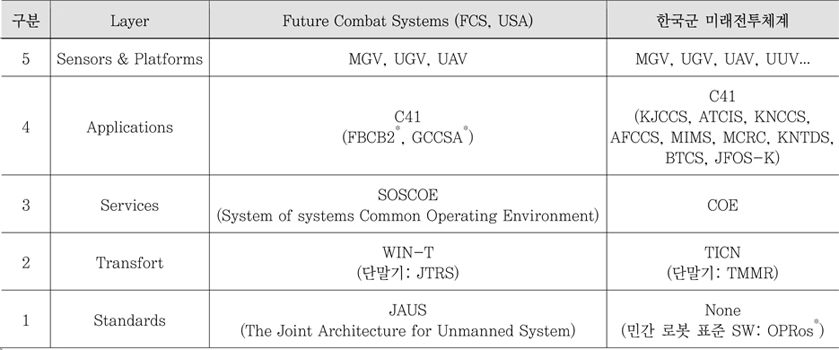
최근 방위사업청에서 국방로봇사업팀 발족과 함께 국방무인‧로봇에 대한 예산투자를 추진하고 있으며, 소요군도 장기전력(JMS)에 소요를 창출하고 있어 군의 운용개념을 보완하여 소요기획(P)-계획수립(P)-예산반영(B)-실행(E)-평가(E)로 환류되는 무기 체계 획득의 선순환 프로세스를 구축하는 방안이 추진되므로, 국방무인‧로봇체계 기술개발 투자가 이뤄질 경우, 민간부문의 연구개발, 사업화 트랜드를 고려하여 우선 민간중심의 시장을 염두에 둔 기술 및 상품화를 고려하여 1단계로 추진하고, 시장 검증 후에 기술수준, 시험평가 보완을 통해 군수용으로 전환하는 전략을 고려해야 할 필요가 있을 것이다. 또한, 민간의 자체투자와 병행하여 정부 R&D 방향을 분석하여 적정한 매칭 투자를 받아 개발을 추진하는 것도 효율적인 방법으로 사료된다[8]. 기술적으로는 자율제어기술에 대한 구현성(feasibility), 소프트웨어 확보 예산 등 많은 부분에 제약이 예상되므로 군 운용환경을 고려한 반자율기술수준(Level 4~6)에 대한 심층적인 검토가 필요할 것이다. 또한, 네트워크 및 표준 소프트웨어 플랫폼을 구현하기 위해서 미국의 FCS 프로그램 중 SOSCOE를 분석하여 각 계층구조에 대한 한국군미래전투체계를 위한 계획을 수립하여야 할 것이다. <표 1>은 미국 FCS 와 한국군의 네트워크 구조를 비교한 내용이다[2].
IV. 결론
미래전 양상에 따른 첨단 과학기술 기반의 무인체계 소요는 지속적으로 확대될 것이며, 이에 무인체계에 요구되는 기반 핵심기술(센서, 자율제어, 소프트웨어 미들웨어 및 통신기술 등)에 대한 능동적인 대책 마련이 필요하다. 국방무인‧로봇체계 개발의 경우, 무기체계 소요 확정까지 장시간이 소요되므로 민간분야에서 경쟁력과 핵심•요소 기술력을 우선 축적하고(단기적), 이를 토대로 실용화를 위한 국내 R&D 투자를 통해 무기체계용 제품개발 전환방안을 고려(장기적)하여야 할 것이다. 특히, 공중무인체계인 무인항공기(UAV)에 대한 소요가 지속적으로 증가하고 있으므로 체계 소요에 대한 핵심기술 확보 및 예산확보 증대가 요구된다. 향후, 지상, 해양, 공중무인체계 또는 센서, 항법, 자율기술 및 소프트웨어 등 핵심 요소 기술 확보방안에 대하여 세부 추진전략 수립을 위한 연구가 필요할 것으로 사료된다.
용어해설
국방 무인‧로봇(Defense Unmanned Robot System) 국방로봇은 무인장비를 운용하여 전투의 효율성을 증대시키고 인력을 절감함으로써 기존 인간 위주의 전투체계를 보완하기 위한 지상, 해양, 공중무인체계(UGS, UMS, UAS)로 정의(합동참모본부, “무인전투 합동개념요구능력,” 2009. 9.)
약어 정리
ABCTM
Army Brigade Combat Team Modernization
ARV
Armed Robotic Vehicle
CAI
Computer Aided Identification
DEM
Digital Evaluation Map
FBW
Fly-By-Wire
FCS
Future Combat System
GIG
Global Information Grid
IMP
Integrated Motor & Propulsor
JRP
Joint Robotics Program
JTRS
Joint Tactical Radio System
MANET
Mobile Ad-hoc Networking
MCM
Mine Counter Measure
MULE
Multi function, Utilities, Logistics and Equipment
NCW
Network Centric Warfare
SOSCOE
System of Systems Common Operating Environment
SSS
Side Scan Sonar
SWARM
Shallow Water Autonomous Reconnaissance Module
TC
Telecommand
TICN
Tactical Information Communication Network
UAS
Unmanned Aerial System
UGS
Unmanned Ground System
UMS
Unmanned Maritime System
USN
Ubiquitous Sensor Network
UWB
Ultra-WideBand
WIN-T
Warfighter Information Network-Tactical

- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.