Human-Vehicle Interaction을 위한 운전부하 관리 기술개발 동향
Human–Vehicle Interaction: Technology Trends in Drivers’ Driving Workload Management
- 저자
- 황윤숙, 김경호 / 자동차인터랙션연구실, 윤대섭 / 주소정보연구팀, 손주찬 / 산업IT융합연구단
- 권호
- 29권 5호 (통권 149)
- 논문구분
- IT 융합기술 특집
- 페이지
- 1-8
- 발행일자
- 2014.10.01
- DOI
- 10.22648/ETRI.2014.J.290501
- 초록
- 최근 차량 내부와 외부 교통환경으로부터 운전자에게 다양한 다량의 정보가 제공되고 있다. 이와 같은 정보가 범람하는 교통환경에서 운전자가 안전하게 운전하기 위해서는 운전자에게 ‘필요한 정보’가 ‘적절한 시기’에, ‘쉽게 지각할 수 있는 형태’로 제공되어 ‘올바른 판단’을 할 수 있도록 해야 한다. 이를 인간-자동차 인터랙션(HVI: Human-Vehicle Interaction) 기술이라 할 수 있으며, 진정한 의미 의미에서의 HVI 기술이 이루어지기 위해서는 운전자가 운전을 함에 있어 사용하고 있는 자원에 대한 관리, 즉 운전부하 관리가 기반이 되어야 한다. 따라서 본고에서 운전자의 운전부하 관리에 대한 정의와 기술개발 동향을 살펴보고자 한다.
Share
I. 서론
최근 과학기술이 발달하고 생활수준이 향상됨에 따라 자동차와 운전자의 수는 많아졌고, 운전자가 운전하는 시간은 길어지고 있는 추세다. 또한, 운전자의 안전운전을 지원하기 위한 다양한 첨단운전지원시스템(ADAS: Advanced Driver Assistance System)이 개발되어 자동차 내부에 장착되었고, 이는 운전 안전성을 향상시키는데 일조하였다.
그러나 이와 같이 자동차의 안전성을 높이고 운전자의 안전운전을 지원하기 위한 다각도의 노력에도 불구하고, 우리 주변에서는 여전히 교통사고가 빈번하게 발생하고 있다.
우리나라에서 2010년에 발생한 교통사고를 기준으로 할 때, 총 교통사고 비용은 약 17조 9천억원이었고 이는 국내총생산의 1.53%에 달하는 금액이다. 이 금액 가운데 도로부문 교통사고로 인해 발생한 비용의 비중이 약 98.7%로 절대적인 것으로 나타났다[1].
우리나라의 교통안전 수준을 OECD 여러 국가와 비교할 때, 2010년 현재 28~30위로 최하위 수준인 것으로 나타났을 뿐만 아니라, 우리나라의 교통안전 개선속도를 볼 때 OECD 국가와의 교통안전 격차는 앞으로 더욱 벌어질 것으로 전망되고 있다[2].
따라서 우리나라는 교통사고, 특히 도로부문에서의 교통사고를 줄이기 위한 기술개발의 필요성이 여전히 남아 있다.
교통사고의 발생은 도로조건, 교통안전시설, 차량조건 등에 의해 형성된 물리적인 교통상황에서 교통참가자인 운전자와 보행자가 어떠한 교통행동을 하느냐에 따라 결정된다고 할 것이다[3].
이와 같은 교통사고는 운전자가 사소한 실수를 하거나 부적절한 운전행동을 하는 동시에 위험발견이나 판단까지 잘못할 경우에 그 발생가능성이 높으며, 운전자의 사소한 실수나 부적절한 운전행동을 야기하는 요인으로는 과속운전, 음주(약물)운전, 피로와 부적절한 주의행동 등의 요인이 있다[4].
따라서 운전자가 안전운전을 하기 위해서는 운전에 필요한 정보를 적절한 시기에 획득해야 하고, 획득한 정보들을 바탕으로 교통환경에 적합한 교통행동을 해야만 한다.
운전자는 운전과 관련한 정보 획득의 90%이상을 시지각 활동으로 한다. 다른 감각으로는 가까운 거리나 좁은 범위에 한정하여 정보를 획득할 수 있음에 반해, 시각은 먼 거리의 범위까지 정보 획득이 가능할 뿐만 아니라 방향, 형태, 속도 등에 관한 정보까지도 정확하게 획득할 수 있어 운전자 시지각 활동은 매우 중요하다[5].
그러나 운전자의 운전 안정성을 향상시키기 위해 자동차 내에 장착된 정보제공 시스템들은 운전자의 시각 분산을 유발하고, 운전자에게 다량의 정보를 무분별하게 제공함으로써 인지부하를 높여 교통사고의 발생가능성을 높이는 역기능적인 측면이 있음이 연구를 통해 밝혀지고 있다.
미국 도로교통안전국(NHTSA: National Highway Traffic Safety Administration)에서는 교통사고의 70% 이상이 운전자의 주의분산과 집중력 감소로 인해 발생하였음을 발표하였다. 뿐만 아니라, 운전 중 문자메시지를 이용할 경우 교통사고 발생 확률이 23배 증가하고, 이는 사물에 대한 운전자의 순간적인 반응시간이 30%정도 늦어지면서 음주운전보다 더 위험한 것이라고 분석하였다[6].
또한, 2010년에 미국에서 발생한 충돌 사고 가운데 93%의 주된 원인이 운전자의 휴먼 에러인 것으로 나타났다[7].
따라서 차량 내부뿐만 아니라, 차량 외부의 교통환경에서 다양한 방법으로 운전자에게 다량의 정보가 제공되고 있는 현재의 교통환경에서 자동차 자체나 차량 내 시스템들은 운전자에게 운전과 관련하여 필요한 정보를 적절한 시기에, 쉽게 지각할 수 있는 적절한 형태로 제공하여 운전자가 올바른 판단을 할 수 있도록 지원해야만 할 것이다. 이를 인간-자동차 인터랙션(HVI: Human-Vehicle Interaction) 기술이라고 할 수 있다.
그러나 진정한 의미에서의 HVI 기술이 이루어지기 위해서는 운전자가 운전을 함에 있어 어느 정도의 자원(resource)을 활용하고 있는지, 가용한 자원이 어느 정도인지 등에 관한 ‘운전부하’ 연구를 기반으로 해야 할 것이다.
운전자의 운전부하를 정량화하고 적절히 관리할 수 있다면, 자동차 및 차량 내 시스템은 운전자의 자원을 최적으로 활용하는 방법으로 운전자와 지능적인 인터랙션을 하게 됨으로써 안전운전을 지원할 수 있을 것이다.
II. 운전부하 관리 기술이란
1. 정의 및 중요성
작업부하(workload)는 과제수행에 필요한 정보처리 능력의 양으로 정의할 수 있다[8]. 본 글에서는 운전자가 운전환경에서 운전작업을 하면서 경험하는 부하를 의미하므로, 작업부하라는 용어 대신 운전부하(Driving Workload)라는 용어를 사용하였다.
운전부하 관리자(Workload Managers)란 운전자의 상태가 과부하 또는 주의분산인 것으로 판단될 경우에 운전자가 차량을 조작하거나 기타 기기를 사용하는 것에 대해 경보 또는 경고할 수 있는 시스템을 작동시키는 시스템이라고 할 수 있다[9].
최근 델파이의 최고기술경영자 제프 오웬스는 운전자-상태 센싱 시스템(driver-state sensing system)과 실시간 운전부하-관리 시스템(real-time workload-management systems)의 중요성에 대해 언급하였다. 그는 상기 시스템을 이용하여 운전자의 집중도를 모니터링하고, 운전자가 도로에 적절한 주의를 기울이지 않을 때 경보를 제공하거나, 이용 가능한 연결 콘텐츠를 정지시킬 수 있으며, 이와 같은 시스템들을 통합하는 것은 안전과 연결된 운전의 미래에 아주 중요한 요소라고 하였다[10].
2. 운전부하 관리자의 유형
P. Green[9]에 따르면, 일반적으로 운전부하 관리자는 운전부하를 관리하기 위해 측정 및 수집하는 정보의 종류에 따라 운전 상황(driving situation), 운전자 조작(driver input), 주행 성능 및 반응(vehicle performance and response), 그리고 운전자 상태(driver state) 등 4 가지 유형으로 구분된다.
가. 운전 상황기반 운전부하 관리자
운전 상황을 기반으로 한 운전부하 관리자 시스템에서 측정하는 대표적인 요인은 도로너비, 곡률, 시간대, 제한속도, 경로(회전), 마찰계수 등이다. 이와 같은 요인을 측정하여 운전부하를 관리하는 경우에는 도로구간별로 사고 데이터를 연계시킬 수 있는 장점이 있지만, 도로구간별로 사고 데이터를 수집하기가 쉽지 않고, 사고가 적게 발생한 상황에 대해서는 그 수를 추정해야 하는 등의 단점이 있다[9].
나. 운전자 조작기반 운전부하 관리자
운전자 조작 기반 운전부하 관리자 시스템에서는 운전자가 조향 핸들, 브레이크 및 가속 페달 등을 조작함으로써 발생하는 정보를 이용하여 운전자의 운전부하를 관리한다[9].
운전자 조작정보는 차량의 종/횡방향 제어라는 1차 과제(primary task)에 대한 직접적인 정보이므로 운전자의 운전부하 측정을 위한 중요한 요인으로 활용될 수 있다. 이러한 운전 조작정보는 차량으로부터 직접 획득하거나 별도의 센서를 이용하여 수집이 가능하다.
다. 주행 성능 및 반응 기반 운전부하 관리자
주행 성능 및 반응을 이용한 운전부하 관리자는 대표적으로 차량 속도와 차로에서의 위치, 가속 정보 등을 측정/수집한다. 이와 같은 유형에서는 차량 속도정보는 비교적 쉽게 습득할 수 있지만, 이 외에 차로에서의 위치정보나 측면 가속정보를 획득하기 위해서는 차선추적기(lane tracker)나 별도의 센서를 부착하여 정보를 수집해야 하는 한계가 있다[9].
라. 운전자 상태기반 운전부하 관리자
운전자의 상태는 대표적으로 운전자의 심장박동률이나 시선 방향 등을 측정할 수 있다. 특히, 운전자의 시선방향에 대한 정보는 주의분산을 알아보기 위한 최상의 요인이라고 할 수 있다. 그러나 이와 같이 운전자의 상태를 측정하기 위해서는 별도의 센서가 필요하다는 단점이 있다.
상기와 같이 운전부하 관리자의 4 가지 유형을 살펴보았지만, 대부분의 운전부하 관리자 시스템은 기본적으로 차량에 장착된 센서들을 기반으로 하기 때문에 단일 유형이 아닌 여러 유형들을 결합한 혼합 형태라고 할 수 있다[9].
III. 운전부하 관리 기술개발 동향
본고에서는 기술의 상용화를 염두에 두고, 산업계를 중심으로 한 운전부하 관리 기술개발 동향에 대해 살펴보고자 하였다. 그러나 국외 기술동향의 경우, 산업계를 중심으로 한 몇몇의 연구내용을 파악할 수 있었으나, 국내의 경우 산업계를 중심으로 한 연구결과를 확인하는데 한계가 있었다.
따라서 국외 기술동향 부분은 산업계를 중심으로 기술내용을 구성하였으나, 국내 기술동향 부분은 연구기관의 기술개발 내용을 중심으로 구성하였다.
1. 국외 기술개발 동향
가. Ford社
Ford社의 운전자 운전부하 추정자(Driver Workload Estimator)는 (그림 1)과 같이 레이더나 카메라와 같은 센서 정보와 운전자가 스로틀, 브레이크, 조향휠을 조작함으로써 입력되는 정보가 결합된 실시간 데이터를 이용하여 운전부하를 측정한다.
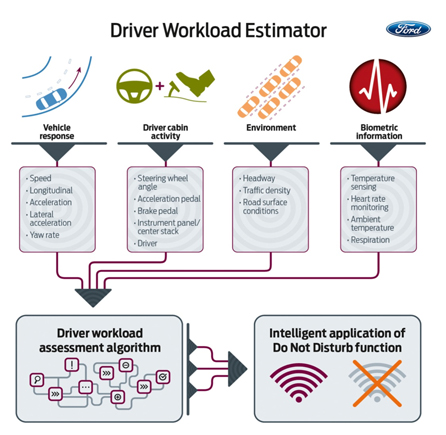
본 시스템은 운전 상황에 대해 측정된 운전부하를 기반으로 차량 내 장치를 관리하는 기능을 기능을 제공한다. 예를 들어, 운전부하 추정자는 운전자가 속도를 높이기 위해 스로틀 페달을 밟는 상황을 차량 내에서 전화벨이 울리기에 부적절한 타이밍이라고 판단한다.
이와 같은 기능은 운전부하가 높은 상황에서 운전자가 도로 상황에 집중할 수 있도록 지원하는 MyFord® Touch의 한 부분으로 이용이 가능하다[11].
Ford社는 차량 내/외부에서 발생하는 정보와 운전자의 상태 정보가 결합된 정보를 주의분산에 대한 필터링뿐만 아니라, 전방 충돌 경고 시스템이나 보행자 검출 시스템과 같은 ADAS를 위한 초기 경고 정보로도 활용할 수 있을 것으로 기대하였다[12].
나. Denso社
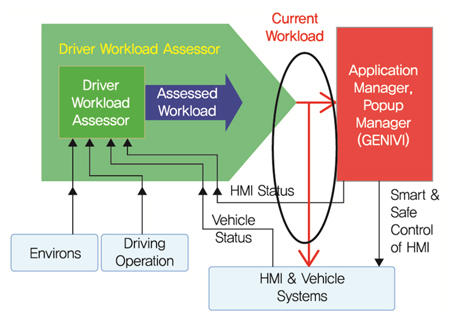
Denso社의 운전자 운전부하 관리(Driver Workload Management)는 GENIVI(GENAVA In-Vehicle Infotain-ment alliance)의 아키텍처를 기반으로 개발되었다.
GENIVI 운전자 운전부하 평가자(Driver Workload Assessor)는 현재 운전부하 수준을 평가하기 위해 이용 가능한 입력 소스를 모니터링하여 현재 수준에서의 운전부하를 평가하고, HMI 컨트롤 및 애플리케이션에서 활용할 수 있도록 제공한다((그림 2) 참조).
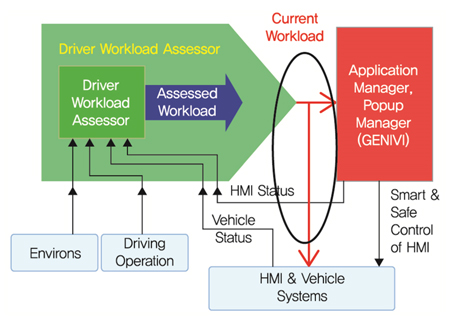
GENIVI 애플리케이션 관리자와 팝업 관리자는 HMI(Human-Machine Interface) 시스템을 컨트롤하고 운전자가 과부하 상태가 되지 않도록 지원하기 위해 정보 간 우선순위를 정하며, 애플리케이션/정보 보류를 결정하고, 애플리케이션으로 ‘운전 친화형(driving friendly)’ HMI 모드 명령 등의 기능을 수행한다[13].
다. 기타
운전자의 운전부하 관리와 관련하여 가장 대표적인 시스템은 볼보社의 지능형 운전정보 시스템(Intelligent Driver Information System)과 Saab社의 통화관리기(Dialogue Manager)라고 할 수 있다. 해당 기술은 조향각, 브레이크 작동, 방향 지시등, 우적 센서 등 차량 네트워크상에 존재하는 정보를 이용해 운전자의 운전부하를 추정하고, 운전부하가 높을 때 휴대전화 또는 문자 메시지 전달을 지연시킴으로써 운전자의 안전운전을 지원하고 있다[14].
이 밖에도 Motorola社는 차량 속도, 조향각, 기어 위치 등의 정보를 이용하여 운전자의 운전부하를 계산하여 그 결과에 따라 외부에서 걸려오는 전화를 제어하는 ‘Polite Phone’ 기술을 개발하였다[15].
2. 국내 기술개발 동향
가. 한국전자통신연구원
한국전자통신연구원에서는 지난 2009년부터 2014년까지 운전자의 운전부하를 정량화하고 이를 기반으로 지능형 멀티모달 인터페이스를 제공할 수 있는 기술개발을 진행하였다[16].
본 운전부하 관리 시스템(Driving Workload Manage-ment System)에서는 운전자의 심리적 특성 및 운전에 대한 태도 등을 기반을 개발된 주관적 운전부하 예측 정보, 운전자의 행동/상태 정보, 도로/주행 상황 정보 등을 기반으로 운전자의 운전부하를 정량화한다((그림 3) 참조).
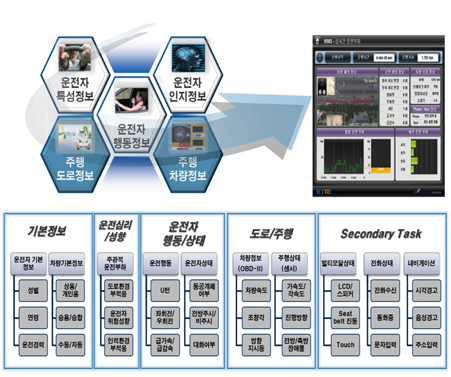
상세하게는 운전자가 29문항으로 구성된 주관적 운전부하 예측도구에 응답함으로써 운전자의 운전부하 산출 시 운전자의 성격 및 태도를 기반으로 한 주관적 운전부하 예측 정보를 포함하게 된다. 본 도구에 대한 타당도는 차량 시뮬레이터를 기반으로 한 실험연구를 통해 입증하였다[17]
또한, 운전자가 조향휠, 가/감속 페달 등을 조작함으로써 입력되는 정보와 GPS 등과 같은 차량 움직임 정보 등을 기반으로 운전자가 수행하고 있는 운전과제를 판단할 수 있도록 하였다. 이는 각각의 운전과제(예, 회전, 유턴, 급/가감속 등)를 수행하며 나타날 수 있는 운전부하의 차이를 고려하고자 함이다.
운전과제에 따른 운전부하의 차이는 실 차/실제 도로를 기반으로 수집한 운전자의 뇌파 정보를 이용하여 분석한 결과[18]를 활용하였다.
이와 같이 다양한 정보를 활용하는 본 운전부하 관리시스템은 Paul Green[9]이 제시한 혼합형 운전부하 관리자로 볼 수 있을 것이다.
본 운전부하 관리 시스템에서 산출되는 운전자의 운전부하는 세부 운전부하(시각, 청각, 인지, 신체)와 통합 운전부하이며, 운전자에게 제공되는 정보는 세부 운전부하 정보를 기반으로 여유가 있다고 판단되는 자원 모달리티로 제공하도록 설계하였다. 즉, 운전자에게 필요한 정보를 제공할 때, 운전자의 시각, 청각, 인지, 신체의 운전부하를 비교하여 여유가 있는 자원으로 제공하는 것이다. 이 때 모달리티의 종류는 시각, 청각, 촉각이며, 각 모달리티는 두 가지 이상의 세기/강도를 가진다.
뿐만 아니라, 본 시스템은 Yekers와 Dodson의 법칙[19]에 따라 운전자의 운전부하 상태를 저부하 상태(underload), 정상 상태, 과부하 상태(overload)로 구분하여 산출함으로써 운전자의 단조로움으로 인한 위험에 대해서도 고려하였다.
본 운전부하 관리 시스템은 주행 중에 운전자의 운전부하를 정량화하여 제공할 뿐만 아니라, 운전자가 운전부하를 스스로 관리할 수 있도록 운전부하 및 주행 상황 정보 등을 운행별로 저장하여 지속적으로 확인할 수 있도록 설계하였다.
이와 같은 운전부하 정량화 관리 시스템은 차량 매립형 AVN(Audio Video Navigation) 단말기((그림 4) 참조)[16] 및 다양한 OS 기반의 스마트폰 버전(안드로이드 버전, iOS 버전 등)으로 개발 완료하였다.

나. 자동차부품연구원
자동차부품연구원은 FOT(Field Operational Tests) 기반의 운전 상황/도로 상황 모델링 및 분석 기술을 개발하였다((그림 5) 참조)[20].

본 기술개발을 통해 운전자 254명의 운전자에 대한 운전자/주행상황 패턴 분석이 가능한 DB를 구축하였고, 현재 DVI (Driver-Vehicle Interaction)라 명명하여 자동차부품연구원 홈페이지를 통해 상용화 서비스를 실시하고 있다. 뿐만 아니라, 운전 상황 및 도로 상황 분석기술을 활용하여 차량 시뮬레이터를 기반으로 한 HVI 테스트 베드(test bed)를 구축하였다.
또한, 기존 연구들에서는 뇌파(EEG: Electroence-phalography)를 이용하여 운전자의 운전부하를 측정하기 위해 β/α 정보를 활용한 것과는 다르게 FOT를 기반으로 수집한 운전자의 뇌파 데이터를 이용하여 운전자의 운전부하를 측정할 수 있는 새로운 방법을 개발하였다.
실제 도로에서 운전자가 실제 차량을 운전하는 동안 측정한 뇌파 정보의 β파 범위에는 차량의 진동으로 발생한 정보가 중복되어 있기에 차량 진동에 의한 정보를 제거하여 운전자의 순수한 운전부하를 정량화할 수 있도록 half β/α를 이용하는 방법을 개발하였다[20].
IV. 결론
본고에서는 HVI 기술을 위해 필수적인 운전자의 운전부하 관리 기술의 개요 및 국내외 기술개발 동향에 대해 살펴보았다.
최근 차량 내부에서 제공되는 다량의 정보로 인해 발생하는 운전자의 과부하 문제, 국도나 고속도로에서의 장시간 운전으로 인해 발생하는 저부하 문제 등은 실제 교통사고의 주요 원인으로도 이어지고 있다.
따라서 운전자의 운전부하를 최적화하고 이를 관리할 수 있는 기술의 중요성 및 산업계의 수요도 점차 높아질 것으로 전망되며, 운전부하 관리 기술 및 이를 기반으로 한 HVI 기술은 현재 개발 진행 중인 스마트카와 자율주행 자동차 기술 등 지능형 자동차를 개발하는데 있어 운전자의 상태를 객관적으로 판단할 수 있는 운전자 상태 인식 분야 요소 기술로 활용될 것으로 기대된다.
안전하고 편리한 운전, 탈(脫)교통사고를 위한 자동차 및 차내 시스템 개발이라는 궁극적인 목표를 달성하기 위해서는 운전자의 운전부하에 기반한 최적의 정보관리 기술개발에 대한 노력이 지속되어야 할 것이다.
용어해설
HVI 기술 운전자와 차량간 지능적이고 적응적이며 효율적인 인터랙션을 지원하기 위한 기술을 의미함.
운전부하 작업자가 작업을 수행하면서 경험하는 일반적인 작업부하의 의미를 기반으로 운전자가 교통환경이라는 특수한 환경에서 운전작업을 수행하며 경험하는 작업부하라는 의미를 표현하기 위해 사용함.
약어 정리
ADAS
Advanced Driver Assistance System
AVN
Audio Video Navigation
DVI
Driver-Vehicle Interaction
EEG
Electroencephalography
EEG
Electroencephalography
FOT
Field Operational Tests
GENIVI
GENAVA In-Vehicle Infotainment alliance
HMI
Human-Machine Interface
HVI
Human-Vehicle Interaction
NHTSA
National Highway Traffic Safety Administration
이순철, 오주석, “운전행동결정요인이 위험운전, 주의행동 및 피로대처에 미치는 영향,” 한국심리학회지 산업 및 조직, vol. 20, no. 4, 2007, pp. 395-414.
A.S. Cohen, “Feed forward programming of car driver's eye movement behavior: A system theoretical approach,” PN, 1980.
D. de Waard, “The Measurement of Drivers’ Mental Workload,” The Traffic Research Centre VSC, 1996.
P. Green, “Driver Distraction, Telematics Design, and Workload Managers: Safety Issue and Solutions,” SAE International Paper Number 2004-21-0022, 2004.
Ford, “Ford Research Developing Intelligent System to Help Drivers Manage Stressful Situations on the Road,” 2012. http://corporate.ford.com/news-center/press-releases-detail/pr-ford-research-developing-36728
WIRED, “How Ford Calculates Driver Workload to Dial Back Distractions,” 2012. http://www.wired.com/2012/06/ford-workload/
Y. Nakamura, “Driver workload management based on GENIVI Driver Workload Assessor,” Automotive Linux Summit, 2014.
Y. Hwang et al., “A Validation Study on a Subjective Driving Workload Prediction Tool,” IEEE Trans. Intelligent Transp. Syst., vol. 15, no. 4, 2014.
H.S. Kim et al., “Driver Workload Characteristics Analysis Using EEG Data From an Urban Road,” IEEE Trans. Intelligent Transp. Syst., vol. 15, no. 4, 2014, pp. 1844-1849.
R.M. Yerkes and J.D. Dodson., “The relation of strength of stimulus to rapidity of habit-formation,” J. Comparative Neurology and Psychology, vol. 18, no. 5, Nov. 1908, pp. 459~482.



- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.