모바일 단말 기반 고정밀 실내 융합 측위 방법
High Accuracy of Indoor Hybrid Positioning Method based on Mobile Device
- 저자
- 이재기, 소운섭, 이준석, 유성재 / ICT멘토링지원팀
- 권호
- 29권 6호 (통권 150)
- 논문구분
- 일반 논문
- 페이지
- 113-125
- 발행일자
- 2014.12.01
- DOI
- 10.22648/ETRI.2014.J.290612
- 초록
- 최근 모바일 단말 기술의 발전과 무선망의 성능 향상에 따른 다양한 서비스가 제공되고 있는 추세이며, 위치정보인식시스템과 결합된 서비스에 많은 관심이 높아졌다. 본고에서는 GPS(Global Positioning System)의 신호가 미치지 못하는 건물의 실내환경에 적합한 경로 안내서비스 및 지하시설물 안내 등 초정밀 실내 측위 서비스를 제공하기 위한 융합 측위 방안을 제안한다. 융합 측위 방안은 실내외 연속 측위를 위해 실외에서는 GPS를 이용하고 실내환경에서는 WLAN 기반의 측위 전용 AP(Access Point)를 이용, 전파신호의 LoS(Line of Sight)를 확보하여 측위하고 전파음영지역에서는 스마트폰의 가속도, 자이로센서 등 여러 가지 관성센서를 활용하여 PDR(Pedestrian Dead Reckoning) 알고리즘 등을 적용하여 측위한다. 또한 측위 정확도 향상 및 오차를 줄이기 위한 방법으로 LSE(Least Squire Estimation) 및 EKF(Extended Kalman Filter), KNN(K-Neighbor Node)/ MSSM(Maximum Signal Strength Model) Algorithm 등 다양한 융합 측위 알고리즘을 적용하여 실내환경에 적합한 최적의 초정밀 실내 측위 서비스를 제공한다.
Share
I. 서론
무선 네트워크 기술의 발전과 모바일 기기의 성능이 비약적으로 발전함에 따라 실내 위치인식에 대한 사용자의 관심과 이를 활용한 다양한 서비스에 대한 관심이 매우 높아졌다. 기존의 측위기술인 GPS(Global Positioning Service)의 위치인식 기술이 활용되지 못하는 실내환경에서는 정확한 위치인식(location-aware) 및 경로안내(Navigation) 등을 위한 위치추적(Location Tracking) 및 초정밀 실내 측위(HAIP: High Accuracy Indoor Positioning)에 한계가 있다. 위와 같은 문제점을 해결하고자 스마트폰을 활용한 고정밀 실내 융합 측위 알고리즘과 측위기술을 개발하여 정확도가 높은 스마트폰용 실내 측위 서비스를 제공하고자 하는 것이다.
위치정보서비스(LBS: Location Based Service)는 크게 실내 및 실외 위치정보서비스로 구분하여 적용되어 왔으며, 실외 위치정보서비스는 주로 GPS를 이용한 다소 오차가 허용되는 측위 서비스를 제공하였다. 이에 반해서 실내 위치정보서비스는 적용되는 측위기술에 따라 크게 2 가지 형태로 구분할 수 있다.
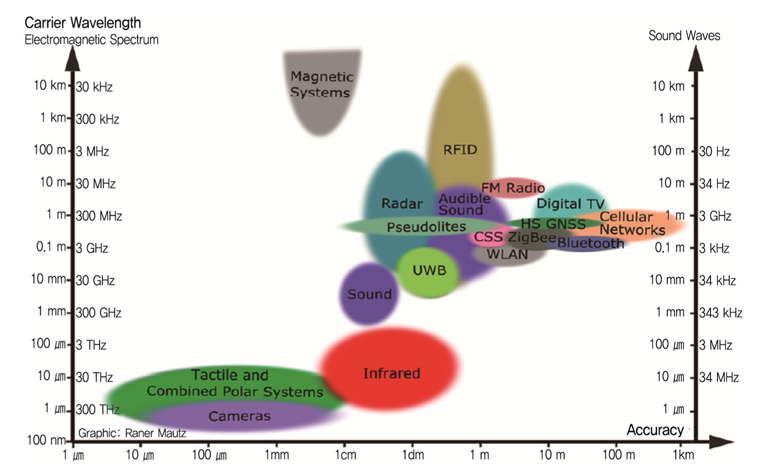
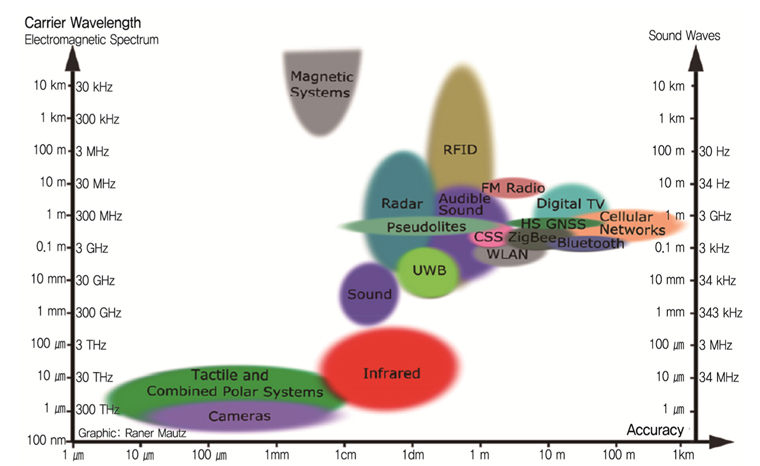
첫째, AP(Access Point)로부터 수신한 신호세기(RSS: Received Strength Signal)를 측정하여 이것을 지리정보지도(Geo-Graphic Map)로 매핑 처리하여 측위하는 방법(Fingerprint 방식)과 Wave Propagation & Distance 기술을 적용하여 측위하는 방법으로 Range based Location Service가 있으며, 둘째는 전파신호가 미치지 못하는 전파음영지역(NLoS: Non Light of Sight)에서는 스마트폰에 내장된 관성센서(Inertial Sensor)들을 활용하여 측위하는 방법인 Range free Location Service가 있다. 또한 실내 측위기술은 정확도 및 적용범위(Coverage)에 따라 다양한 측위기술들이 제안되고 있으며, (그림 1)과 같이 Carrier Wave Length에 따른 측정기술 및 구현방법이 달라진다[1].
본고에서는 실내 측위에 적용되는 다양한 기술 중에서 ‘스마트폰을 활용한 고정밀 실내 측위기술 개발’로 측위 오차 범위가 2m 이내인 고정밀 실내 측위기술 개발방안을 제안한다.
본고의 전체 구성은 II장에서 실내 측위 관련 연구 및 기술동향, 표준화 동향 등을 살펴보고 III장에서 융합 측위를 위한 핵심 알고리즘 개발 및 기술개발 내용에 대해 언급한다. IV장에서는 융합 측위기술을 이용한 실험결과 및 시험환경, 측위 결과를 분석한다. 그리고 마지막으로 결론 및 향후 연구방향 등을 제시한다.
II. 실내 측위기술 동향분석
실내 측위기술은 크게 인프라 기반(혹은 네트워크 기반)과 단말 기반으로 분류할 수 있으며, 이들의 단점을 상호 보완할 수 있는 융합 측위기술 등으로 분류된다. 즉, 장애물이 많은 실내환경에서는 신호의 방향, 세기, 도달시간 등을 기반으로 하는 위치추정 방법에 많은 제약상황이 존재함으로 실내환경 특성상 다중경로(Multi path)에 따른 신호 감쇄(multi-path Loss) 등에 의해 일정한 값을 획득하기 어렵기 때문에 측위 성능 평가에 많은 지장을 주고 있다. 이렇게 전파의 세기가 잘 미치지 못하는 음영지역에 대한 실내 측위를 하기 위한 대안으로써 휴대 단말을 이용하여 측위를 하는 방법이 있는데, 그 대표적인 방법이 모바일 단말(MD: Mobile Device)인 스마트폰을 이용, 폰에 내장된 관성센서들을 이용하여 사용자의 보폭 및 폰의 장착위치나 방향 등을 추정하고 DR(Dead Reckoning) 알고리즘을 적용하여 측위하는, 보행자 보폭기준의 PDR(Pedestrian Dead Reckoning) 기법[2]-[4] 등이 있다. 위와 같이 복잡한 실내환경에서 융합 측위할 수 있는 제반 기술동향에 대한 분석은 참고문헌 [5]에 상세히 기술되어 있다.
1. 인프라 기반 측위기술
인프라 기반 측위기술은 (그림 1)에 제시한 것과 같이 커버리지 및 적용기술에 따라 WLAN, UWB, RFID, IR(Infrared) 등 무선통신 네트워크 인프라를 기반으로 셀인지 기술 및 ToA(Time of Arrival), TDoA(Time Difference of Arrival), AoA(Angle of Arrival), Fingerprinting 방식 등이 있다. 이 방식은 측위 정확도가 높은 반면에 인프라 구성을 위한 초기 환경 구축비용이 많이 소요되며, AP의 위치변경에 따른 DB 재구성 및 수신신호세기(RSS)의 재측정 등으로 시스템 운영상의 효율성이 많이 떨어지는 단점이 있다.
2. 단말 기반 측위기술
인프라 구성이 필요 없는 모바일 단말의 관성 측정장치를 이용하여 측위하는 기술로 네트워크 기반의 측위기술에 비해 환경구축 비용은 저렴하나 측위오차를 줄이는 보정방법이 필요하고 추정오차 보정을 위한 칼만필터(KF: Kalman Filter) 알고리즘 적용 등이 필요하다. 가속도계(Accelerometer)나 자이로(Gyro) 등 모바일 단말의 관성센서를 이용한 측위는 센서의 출력값을 이용하여 사용자 패턴을 적용, Noise를 제거하고 정밀 필터링(Particle Filtering)을 거쳐 위치를 계산한다[3].
가속도센서로부터 수집된 데이터를 토대로 스텝 수를 계산(Count)하고 사용자의 특성을 고려하여 이를 추정한다. 또 자이로나 컴파스(Compass)센서 등을 활용하여 진행방향을 추정, 건물의 맵 정보 등과 융복합하여 최종 정밀필터를 거쳐 에러를 보정한 후 정밀한 위치를 추정하게 된다. 이와 같이 스마트폰의 관성센서를 활용하여 사용자의 행동패턴 등을 반영, 신발이나 로봇, 벨트, 주머니 및 핸드백 등에 스마트폰을 장착하여 실내 측위를 수행한 다양한 연구결과들이 보고되고 있다[3][4][6][7].
3. 표준화 동향
실내 측위 표준화 동향은 Open Mobile Alliance Location WG을 중심으로 실내 측위 향상을 위한 LPPe2.0 프로토콜 표준화가 진행 중이며, 3GPP(3rd Generation Partnership Project)의 LPP(LTE Positioning Protocol) 표준을 User Plane으로 확장한 이동통신 단말(UE)과 서버 간 측위용 프로토콜에 대한 표준문서 작성 및 기술규격 논의를 거쳐, 20114년 말 Candidate Enabler 승인을 목표로 진행 중이다. 현재 표준으로 추진되고 있는 분야별 주요 내용을 요약해 보면 전파특성 정보전달, 영상 기반 상황인지 방법, 보행자용 추측항법 측위 방법, 실내외 지도 속성정보 제공 및 단말 보조 기반 운동서브 상태 제공 등을 들 수 있다.
III. 융합 측위기술 개발
1. 고정밀 실내 측위를 위한 제안 시스템
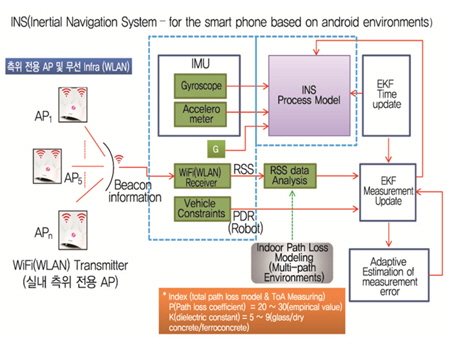
실내 측위를 위한 시스템의 구조는 (그림 2)와 같이 측위 전용 AP 및 WLAN 기반의 무선 인프라(Infra)를 활용하는 비콘(Becon) 정보처리 부분과 스마트폰에 내장되어 있는 관성센서들을 활용하는 부분, 측정된 데이터의 잡음 등 오류를 보정하고 측위 정확도를 높일 수 있는 Particle Filtering 모듈 등으로 구성된다.
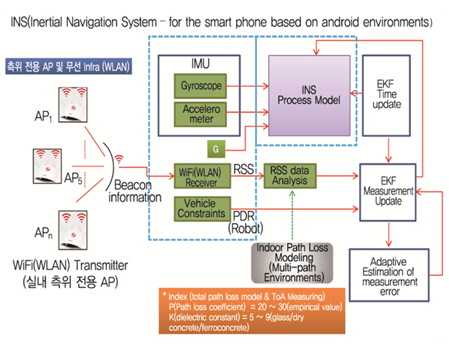
즉, 스마트폰의 관성 측정장치(IMU: Inertial Measurement Unit), 실내 측위 안내시스템(INS: Inertial Navigation System)의 Process Model, AP의 비콘 정보를 수신하여 신호세기를 측정/분석하는 모듈, 측위 추정 데이터의 보정 및 누적오차 등을 줄일 수 있는 EKF(Extended Kalman Filter) 모듈 및 추정 에러 보정 처리부, 전파음영지역에 대한 보행자 기반의 위치, 속도, 방향 등을 추정하기 위한 Vehicle Constraints 처리부 등으로 구성된다.
스마트폰의 관성센서들은 전파음영지역에서 보행자 기반의 위치추정을 위해 사용되며, 유사 결과로 모바일 단말을 이용한 PDR 시스템의 설계 및 기능을 구현한 사례로 실내 위치기반서비스 제공을 위한 보행자기반의 실내 측위 연구결과가 이미 발표된 바가 있다[2][4].
2. 실내 측위시스템 요구사항 분석
실내 측위시스템의 요구사항 분석은 User Requirements와 Technical Parameter 등 크게 2 가지 측면을 고려하여 분석[1]하였으며, 주요 요구사항을 살펴보면 측위 정확도 및 측정 불확실성, 적용범위, 비용, 인프라 및 통신방식, 데이터 출력형태, Interface, 가용도 및 규모 등 사용자 관점과 상위 요구사항들을 해결하기 위한 솔루션으로써 필수적으로 고려되어야 할 기술적인 요소들로 측정기술의 원리 및 측정횟수, Technology, 위치추정 알고리즘 및 통신수단, 시스템 구조, 응용분야 등을 토대로 실내 융합 측위기술 개발 및 알고리즘 적용, 측위시스템 개발에 활용하였다.
3. 융합 측위 알고리즘 개발 및 적용
본 시스템에 적용된 융합 측위 알고리즘은 1차로 모바일 단말을 사용하여 RSS 기반의 셀인지 시험 앱 및 스마트폰 관성센서 시험 앱을 이용하여 측위 전용 AP로부터 수신된 비콘 정보를 활용하여 위치 좌표(x,y) 및 신호세기(RSSI: Received Signal Strength Indicator) 등을 수집, 분석하여 해당정보를 실내 측위에 이용한다. 이때 실내환경에 적합한 추정 모델 파라미터들을 적용하고 Indoor Multi-path Loss Model[8]에 적용, 추정하게 된다. 또한 추정오차를 줄이기 위한 각종 보정 알고리즘[9]을 적용하여 추정오차를 최소화하도록 한다.
아래 식은 건물의 장애물에 대한 감쇄지수를 반영한 신호전파모델(Radio Propagation Mode)l[1][10]에 의한 수신 Power를 구하는 모델식이다.
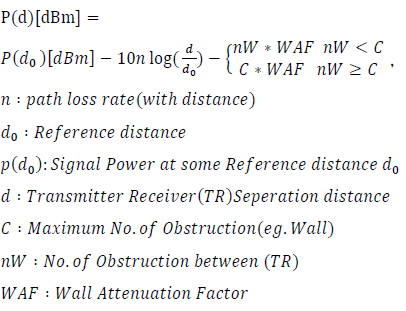
Multi Path Loss Model[11]에 의거한 기존 연구결과[4]에서는 Free path loss environment에서 n=2, 실내공간(indoor Environments)에서는 n=3에 가까운 것으로 발표한바 있다. 기준점(RP: Reference Point)으로써 AP로부터 1m 또는 일정거리로 고정시켜 놓고 RSSI를 측정하여 이를 비교하는 방법 즉, 전파지도로 Mapping 처리하는 방식(일명 Fingerprinting 방식[10][12]이라고 칭함)을 주로 이용하고 있으나 AP의 설치위치가 변경되는 경우에는 기존에 구축된 측위 DB를 사용하기 곤란해 측위를 다시 반복 수행해야 하는 단점이 있다.
이러한 문제점을 극복하기 위해 단말 기반의 실내 측위를 수행하되, 일부 LoS(Line of Sight)를 확보할 수 있는 구간은 AP로부터 수신되는 RSS 기반의 측위(ToA방식 이용)를 수행하고 NLoS 구간에서는 스마트폰의 관성센서를 이용한 측위를 수행, 이 2개의 기술을 융합하여 측위함으로써 좀 더 정밀한 실내 융합 측위 결과를 도출한다. 이와 같이 RSSI 및 INS를 조합한 실내 측위 모델은 순수 WLAN 기반의 Fingerprinting 방식의 측위 정확도보다도 높은 정확도를 가지는 연구결과를 발표한 예[8]도 있다. RSSI 값 측정을 기본으로 하는 신호감쇄모델(Signal Attenuation Model)[1]의 기본 식은 아래 식(1)과 같이 표현된다.
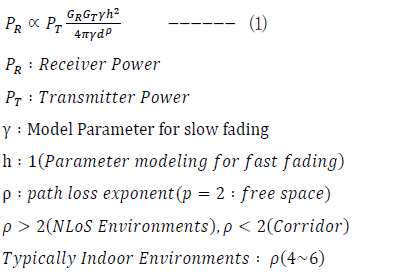
위 모델은 송수신기 간의 전송 Power를 이용, 실내환경에 대한 모델 파라미터를 적용하고 통신채널 간의 신호감쇄를 기반으로 거리를 측정할 수 있는 통신채널 신호 감쇄를 기반으로 한 대표적인 실내 측위모델이다.
이론적으로 거리 di(i = 1, 2, 3, ... n)는 수신기 측에서 반복 결정된 멀티 비콘의 RSSI 값으로 결정하기 때문에 핑거프린트(Fingerprint) 방식이 신호전파모델에 많이 활용되고 있는 추세이다. 이러한 방법을 수학적 공식(Mathematical Formulation)으로 모델링 한 연구결과를 Bensky가 2007년에 발표한 바 있다.
측위 데이터 수집은 Android 기반의 스마트폰을 이용하여 AP로부터 수신된 비콘(Beacon) 정보를 이용하여 측정, 수집, 분석한다. 또한 신호세기와 추정거리(좌표)에 대한 오차를 최소화하기 위해서 적용한 추정 에러 보정 알고리즘은 EKF[6][7] 및 MinMax 알고리즘[13] 등을 적용하여 누적 추정오차를 최소화하여 실측치와 근접하도록 융합 측위 알고리즘을 적용, 관측하였다.
정확한 실내 측위를 위해서는 효율적인 AP의 선택방법[9] 또한 중요하며, 이에 대한 적정 수준의 Power, 거리 등을 판단할 수 있는 알고리즘도 제시되어야 한다. 참고문헌 [14]에서는 이러한 문제점을 해결하고자 CaDet Algorithm 제시하여 실내 측위에 활용한 결과를 보여주고 있다. 측위에 사용된 비콘 프레임정보는 IEEE 802.11 표준을 이용, SSID(Service Set Identifier) 및 BSSID(Basic Service Set Identifier) 등 위치정보 등을 이용해 측위 데이터로 활용함으로써 측위에 필요한 다양한 정보들을 획득한다. 즉, 비콘 정보를 이용하여 실내 측위를 한 사례[15]도 이미 발표되었으며, IEEE 802.11 비콘 프레임(Beacon Frame)의 IE(Information Element) 정보를 활용하여 다양한 서비스를 제공한 사례도 제시[16]되었다.
본 연구에서는 측위 추정결과의 오차를 줄이기 위해서 관성센서의 추정오차 및 RSS 기반 셀인지 방법으로 추정된 데이터를 KF와 LSE(Least Squire Estimation) method에 적용, 추정함으로써 실내 측위 추정오차가 최소화되도록 하였다.
IV. 측위 결과 및 분석
1. 시험환경 구축
시험환경 구축은 건물의 층별 구분(Layering)을 위해 1층 층계에 AP를 2대를 설치하고 2층 대강당 안에 12m 간격으로 5개를 사각 형태로 설치, 측정하였다. 건물의 실내 측위 수행 영역은 RSS 기반 셀인지가 가능한 지역(LoS 확보)과 전파신호가 미치지 못하는 NLoS 영역으로 나누어 융합 측위하였다.
실내 측위를 수행한 시험대상 건물은 ETRI 융합기술 연구생산센터의 7층 건물 중 넓은 Open 공간과 층간 고도가 높은 공간이 존재하는 2개층(1, 2층)으로 정하였으며, 콘크리트와 유리벽으로 구성되어 있고 1층에서 2층으로 계단이 연결되어 있는 구조로, 넓은 오픈 공간으로 구성되어 실내 측위에 적합한 환경이다.
2. 실내 융합 측위 개념 및 방법
가. Basic Concept
실내 융합 측위 개념은 측위 전용 AP를 이용한 RSS 기반 셀인지를 통한 측위 방법과 스마트폰의 관성센서를 이용하여 측위하는 2 가지 방법을 이용하였다. 즉, RSS 기반으로 측위하고 LoS가 확보되지 않는 구간에서는 PDR 기반으로 측위하는 방법이다. 향후에는 TDoA 및 AoA 기반의 실내 측위 방법도 고려할 예정이다.
나. 융합 측위 방법
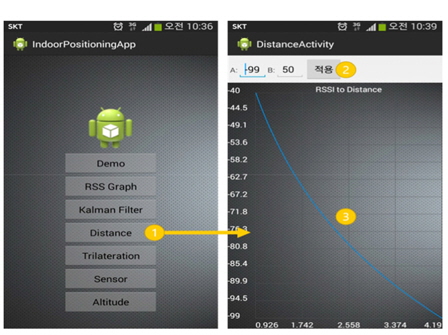
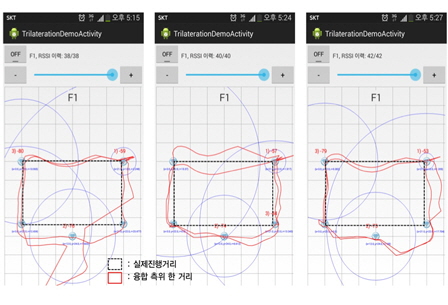
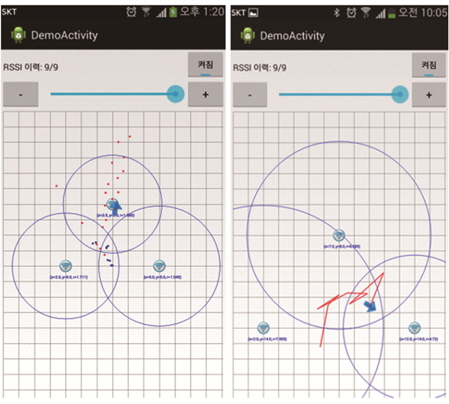
(그림 3)과 같이 RSS 기반 측위 방법은 측위 전용 AP로부터 받은 신호세기를 측정, 위치 좌표(x,y)를 구하고 삼변측량법(Trilateration)을 활용하여 정확한 위치(Location)를 계산하였다. 또한 스마트폰의 관성센서를 이용한 측위 방법은 가속도센서의 오차속도와 이동거리에 따른 누적오차를 줄이기 위해 z축 가속도((그림 3) 오른쪽 노란색) 변화로 성인남자의 PDR 기반으로 스텝을 인식하여 추정하였으며, 지자계 센서와 각속도 센서(Azimuth)로 이동방향을 계산하고 압력센서(고도센서, Altitude)로 고도를 유추하여 층간의 이동경로를 추정함으로써 복합측위 방안을 마련하여 상호융합 측위하는 ‘고정밀 융합 실내 측위기술’을 적용하였다.
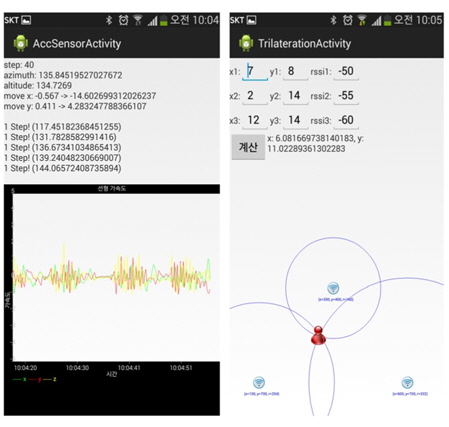
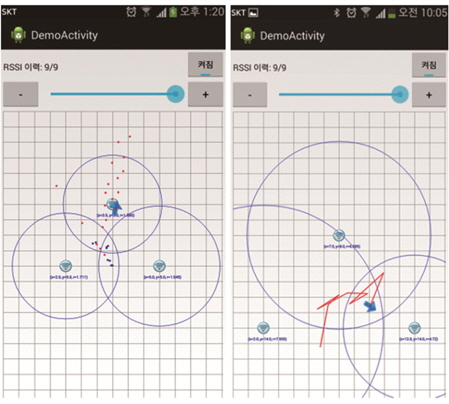
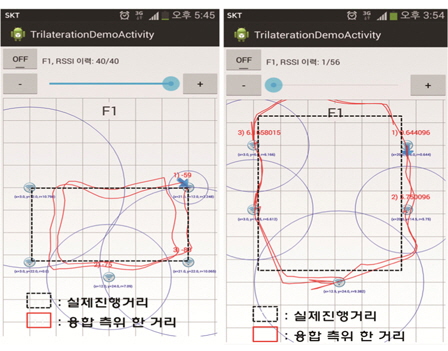
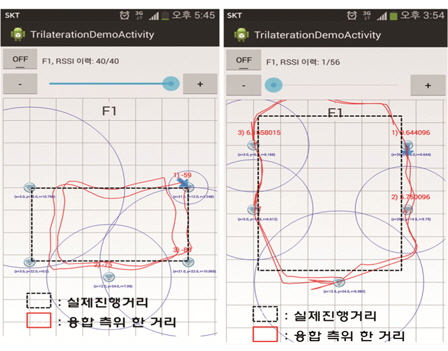
즉, Beacon Node(측위 전용 AP)의 RSSI 값을 감지하여 우선적으로 삼변측량(Trilateration) 방식을 기반으로 이동경로를 화면에 출력하고 그 이력(History)을 관리하여 정확한 스마트폰용 실내 측위 결과분석에 활용하였으며, 모바일 단말의 이동경로에 따른 실내 측위 결과는 (그림 4)의 우측 중앙에 붉은 실선으로 표시한 것과 같다. 붉은색 점은 화살표 방향으로 이동하면서 PDR 기반으로 측정한 결과이고 파란색 점은 측위전용 AP를 이용하여 삼변측량법을 사용, RSSI 기반으로 실내 측위를 추정한 결과다. PDR 기반 이동경로에 대한 측정횟수와 AP로부터 받은 비콘 정보를 활용하여 측정한 RSS 신호를 기반으로 측위한 횟수가 다른 것은 이동거리에 따른 측정주기 및 데이터 반영주기가 다르기 때문이다.
삼변측량법에 의한 update 주기는 평균 3.7초(S3 기준)에 1회 정도로 PDR 기반으로 천천히 걸어도 10m 이내에 3번 정도 측위되는 반면에 스마트폰의 관성센서는 움직임을 감안하여 속도(스텝 수), 방향(r: radian), 위치 좌표(x,y)를 고려하여 실시간으로 측위함에 따라 측위 결과 비교 시 많은 차이를 보이고 있다.
RSSI 측정값을 반영하는 경우 진행속도에 따른 신호세기의 불안정으로 인한 특성 때문에 tracking 결과를 smoothing하게 처리하는 오차 보정방법이 필요하였다. 즉, 융합 측위 데이터에 대한 정밀 필터링(Particle Filtering) 과정이 필요하며, 이 과정을 통해서 User의 Location을 정밀 추정하는 방법을 사용하였다.
3. 측위 데이터 수집 및 분석, 시험
RSS 기반 및 스마트폰의 관성센서를 활용한 융합 측위 데이터는 (그림 3-5)와 같다. 측정에 소요된 장비는 안드로이드 기반의 삼성 Galaxy-S3를 이용, 반복 측위하여 적용한 결과이다. Time Interval은 3.7초 주기로, AP의 비콘 정보를 토대로 스마트폰을 이용하여 측정하였다. 측위에 적용된 측정데이터는 실내 측위에 유효한 데이터(Rx Power Range: −45db~−80db)를 선택, 적용하였으며, 범위(Range)를 벗어나는 값들은 측위 정확도를 높이기 위해서 반영하지 않았다.
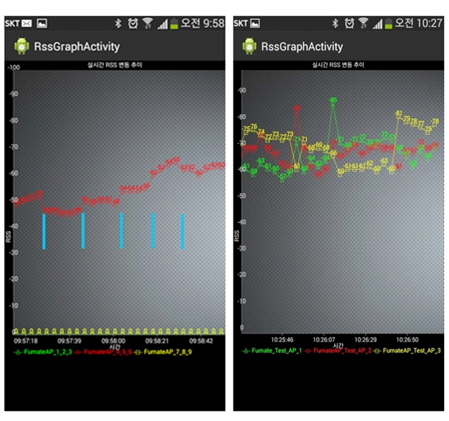
가. 측위 전용 AP 성능 시험
정확한 측위를 위해서 AP의 거리별 성능을 측정하여 이를 실내 측위에 반영하였다. 거리별 AP의 성능 측정은 1차적으로 (그림 5)의 좌측과 같이 가능한 한 신호 간섭을 최대한 제거하기 위해 AP를 한대만 놓고 벽이 없는 상황에서 테스트하였으며, 좌측 그림의 파란 막대 하나에 50cm로 2미터까지는 LoS 확보가 용이한 데이터가 수집되는 결과를 보여준다.
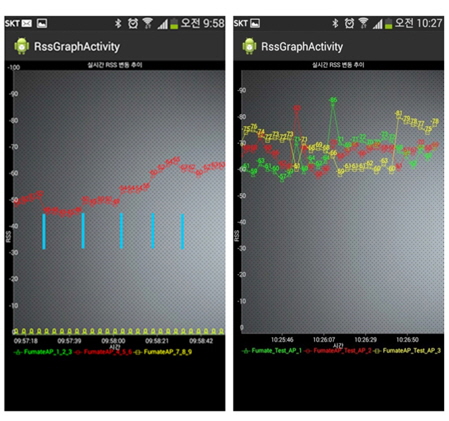
또, 비교분석을 위해서 우측 그림과 같이 기준점 3m이상 되는 거리에서 동일 벤더의 제품 3개를 가지고 RSSI를 측정하여 결과를 보여주고 있다.
측위 전용 AP의 유효 신호세기 반경은 최대 5m로 송신 파워를 조정 중에 있어 그 이상의 거리에서는 스마트폰의 관성센서들을 이용하여 측위를 수행하였다.
나. 측위오차 보정 및 알고리즘 적용
측위오차 보정은 관성센서 시험 앱을 이용하여 모바일 단말에서 측정한 RSSI 값에 오차가 포함되어 있는 것을 제거하기 위해 KF를 적용하였고 스마트폰의 관성센서 누적오차를 보정하기 위한 알고리즘을 적용, 시험하였다. 즉, PDR 기반의 측위 시 단말의 위치나 보폭, 속도 등 상황에 따른 오차 보정 및 알고리즘 적용이 필요하다[17].
AP 비콘 방식으로 사용자 주변의 측위 전용 AP를 검색하여 신호세기를 수신하고 Noise 제거를 위한 오차를 보정하여 이 값을 기반으로 거리를 추정한다. AP 수가 3개 이하이면 판단기준이 되는 1m 이내인지를 판단하여 사용자의 위치를 설정하거나 이 범주를 벗어나면 스마트폰의 관성센서들을 이용한 DR 기반으로 측위, 위치를 추정한다. 측위 전용 AP 기반 실내 측위가 불가능한 경우는 관성센서를 활용, 센서의 이벤트(Event) 발생 여부를 체크하고 센서타입을 결정하여 센서 메모리에 정보를 저장함과 동시에 센서 타입이 가속도센서인 경우는 해당 메모리에 3축 지자계 센서 정보 여부를 판단, heading 정보를 확보하고 진행방향과 속도를 계산한다. 또 자이로센서 정보 여부를 순차적으로 점검, 각도 등을 고려한 선형가속도를 계산한 후 보행자 기반으로 보폭을 감지하여 PDR 기반으로 추정한다.
4. Tracking a Mobile User
움직이는 모바일 사용자를 대상으로 AP로부터 수신된 신호세기를 고려하여 평균치를 적용하고 거리 및 방향을 추정하였다. 이때 적용된 알고리즘은 모바일 단말 주변의 AP를 검색, 선택하여 신호세기가 가장 센 것부터 검색, 3개의 AP를 기반으로 하여 RSSI 값을 측정하고 이를 평균하여 해당 평균치를 적용하는 최대신호세기모델(MSSM: Maximum Signal Strength Model)과 KNN(K-Neighbor Node) 알고리즘[18]을 조합하여 신호세기의 강도에 따른 우선순위(Priority)를 적용, 추정한다[9][14].
스마트폰의 관성센서와 AP 비콘 정보를 이용, 연속적으로 사용자를 추적하였으며, 스마트폰의 전파세기 측정 주기를 보정, 최적의 측위를 수행함으로써 원활한 위치 추적이 가능하도록 하였고 폰의 위치는 벨트 위 135° 각도로 기울여 측정하였다. 측위 실행 순위는 PDR → RSSI 셀 기반 순으로 실시하였다.
PDR 기반의 측위 문제점은 폰 화면에 반영되는 측위 결과의 update 주기에 의존함으로써 진행속도에 따른 거리(성인 남자 기준: 초당 1.1m 진행)와 휴대폰에 반영된 진행거리가 맞지 않는 현상의 발생함에 따라 이를 실제 진행 거리에 근접하게 처리되도록 경험치(empirical data) 반영 및 AP의 위치정보를 기반으로 보정, 처리하였다.
가. 스마트폰 관성센서를 활용한 고정밀 측위
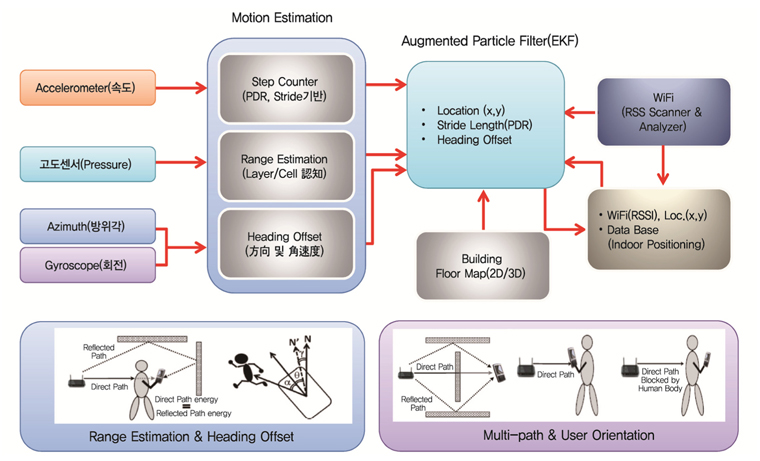
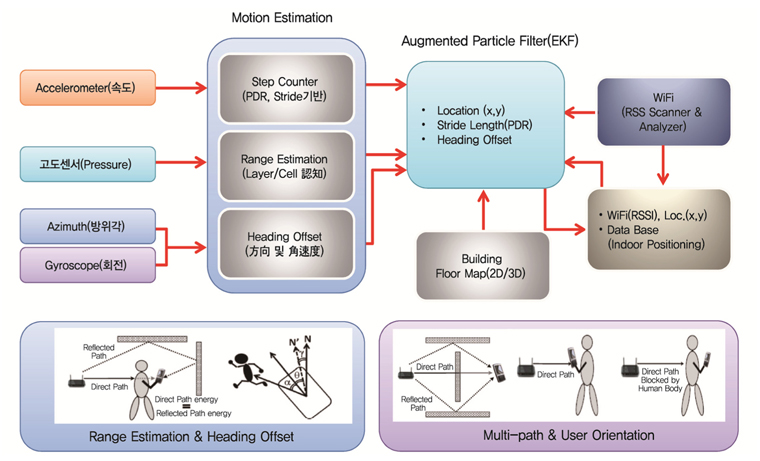
전파신호세기가 미약하거나 미치지 못하는 영역에 스마트폰 관성센서를 이용하여 측위하는 경우는 (그림 6)과 같이 속도나 고도, 회전, 방향 등을 추정하기 위해 관성센서를 이용하여 측정된 값을 Motion Estimation 과정을 거쳐 Augmented Particle Filtering을 통해 위치좌표나 보폭기준 측위, 방향 등을 추적하게 된다.
보폭기준은 성인 남자 기준으로 70cm(30~70cm 가변)로 설정해서 측정하였으며, 측위 데이터 update 주기는 스마트폰의 성능을 고려, 누적 진행거리를 감안하여 오차를 보정할 수 있는 알고리즘을 적용함으로써 실제 위치와 근접하게 추정토록 처리하였다.
사용자의 위치에 따라 실제 AP의 거리가 가까운 경우에도 신호가 약하게 잡히는 경우가 있어 이에 대한 보정처리를 하였으며, (그림 6)의 하단에 제시한 것과 같이 사용자의 스마트폰의 위치에 따라 신호세기가 달라질 수 있기 때문에 실내환경에 맞게 측위 방법을 달리하였다.
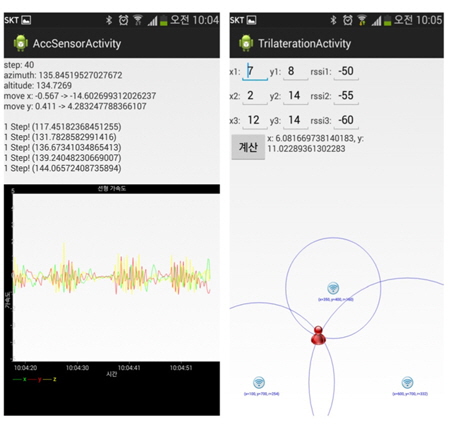
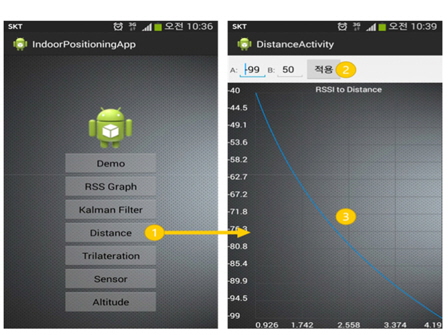
(그림 7)은 실내 측위를 하기 위해 스마트폰에 구현한 고정밀 실내 측위 앱(App)을 이용하여 측정한 RSS 신호를 바탕으로 위치정보를 추정하기 위해 모바일 단말과의 거리를 환산한 예를 보여주고 있다. 또한 삼변측량법에 의한 측위 결과 및 RSSI를 이용한 거리변환과 스마트폰의 관성센서를 이용한 측위 방법, 건물 내 층간 구분을 위한 기능 구현으로 이러한 각 기능들을 이용하여 고정밀 실내 융합 측위를 수행하였다. 이 기능들은 안드로이드 기반 스마트폰에 적합하도록 기능을 구현, 최적으로 운영되도록 개발되었다.
나. 실내 측위 관리 기능
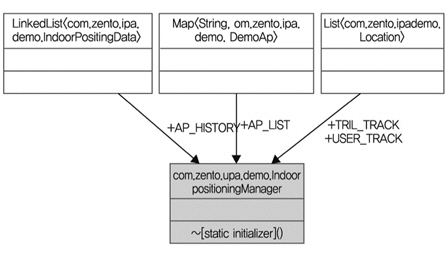
실시간 위치 추정을 위한 핵심 기능 블록으로 실내 측위를 관리하기 위한 <IndoorPositioningManager> 구조체를 구현하고 <IndoorPositioningData> 리스트를 저장하여 실내측위 이력을 관리하며, <DemoAp> 리스트를 저장, 융합 측위 AP들을 관리한다((그림 8) 참조).
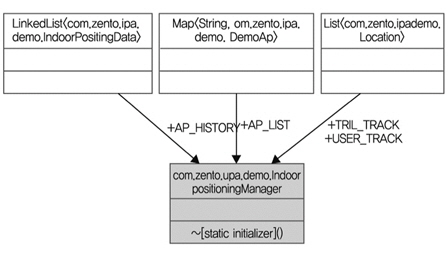
또 <Location> 구조체 리스트를 저장하여 사용자의 이동위치 이력을 관리하는 한편 융합 측위 결과를 시뮬레이션 할 수 있는 GUI 기능을 제공하여 실시간 실내 융합 측위가 가능하도록 기능을 구현하였다.
실시간 실내 융합 측위를 관리하기 위해 아래에 언급한 측위 관리를 위한 주요 기능 구조체와 함께 사용자의 층간 이동 시 층별 2차원 맵(2D map)을 제공하기 위한 <Demo3DActivity> 클래스를 제공한다. 또한 융합 측위 결과를 2D 또는 3D로 지도 위에 표시해 주기 위한 기능으로 <DemoApCustomerView> 클래스 및 건물의 층간 이동 시 새로운 맵을 안드로이드 환경에서 2D로 제공해 주기 위한 <DemoPageFragment> & <DemoPageAdapter> 클래스 등을 구현하였다.
5. 신호전파모델 적용 결과 분석
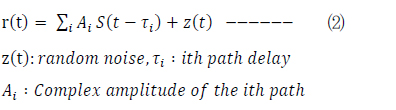
전파신호모델은 복잡한 실내환경에서 다중채널 페이딩(fading)에 의한 감쇄 및 신호의 지연(delay) 등이 발생한다. 즉, 수신된 다중경로신호전파모델 [r(t)]은 아래 식(2)로 표현된다.
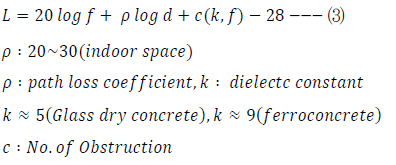
또한, Indoor path loss L은 식(3)과 같이 표현되며, 다양한 실내환경에 따른 모델 파라미터가 달리 설정된다.
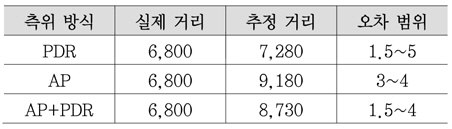
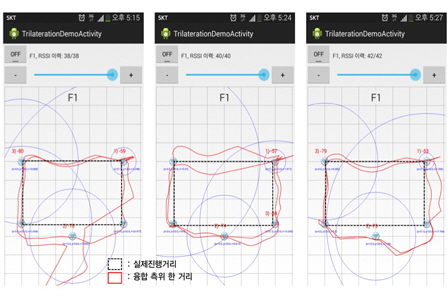
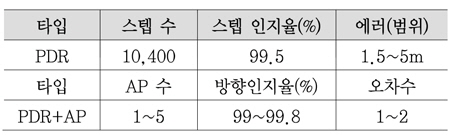
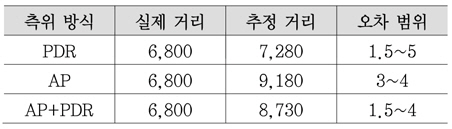
위와 같은 신호전파모델 및 경로감쇄(Path Loss) 모델식에 빌딩의 실내환경에 적합한 모델 파라미터값을 적용, 변화시켜 실측 데이터와 추정치 간의 오차 및 측위 정확도를 확인하였으며, 그 결과는 <표 1-2> 및 (그림 9)와 같다.
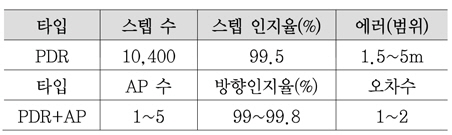
관성센서 자체의 오차로 인해서 일부 구간이 실제 진행한 거리와 측위 추정치 간에 약간의 차이를 보인다.
(그림 9)는 AP의 RSS 신호가 없는 순수 PDR 기반의 측위 결과와 PDR 기반으로 측위를 수행하다가 정확한 위치추정의 RP(Reference Point)가 되는 AP를 만나면 해당 AP의 셀 인지 영역으로 접근, 인지되는 순간 이 위치정보를 활용하여 사용자의 location을 좀더 정밀하게 보정하는 PDR+AP 융합 측위 방식을 취한 결과이다.
6. MNN Model 적용 결과 분석
MNN (Multiple Nearest Neighbor 또는 KNN) 알고리즘을 적용한 결과는 우선적으로 모바일 단말로부터 측정한 인접한 다수(n 혹은 k개)의 AP로부터 수신된 신호세기(RSSI)를 반영하여 추정하였으며, 단말과 인접한 AP의 선택 개수에 따라 측위 오차가 변화할 수 있다. 이에 대한 거리 및 좌표에 대한 추정식은 아래와 같이 식(4), (5)로 표현된다.

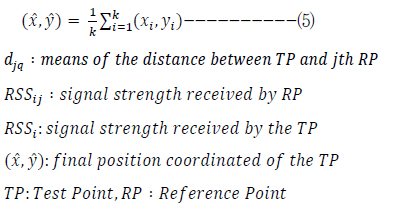
이 방법은 기준점(RP)에서 측위한 결과와 임의의 위치(TP)에서 측정한 결과를 가지고 상호 비교하여 거리를 추정하는 방식으로 초기 시험은 최소의 측위 전용 AP(총 5개)를 가지고 측정하였으며, Max Signal Strength를 토대로 측위 전용 AP의 수를 가변시켜 비교 분석하였다. 기존의 유사 프로젝트의 연구결과[19]는 k값(선택한 AP 수)의 범위가(4~6)일 때 측위 정확도가 가장 높은 것으로 연구결과가 보고되고 있다.
또한 신호세기가 미치지 못하는 공간에서는 스마트폰의 관성센서를 이용한 PDR 알고리즘을 적용, 추정하는 방법을 사용하여 측위하였다((그림 10) 참조). 이와 같이 RSS 기반 셀인지 기술과 PDR 기반의 실내 측위기술을 이용, 단점을 보완하고 측위기술을 융합함으로써 ‘스마트폰용 고정밀 실내 측위’가 가능하도록 하였다.
V. 결론 및 향후 연구
본고에서 제시한 융합 측위 방법은 실내환경에 적합하게 2개의 경우를 고려하였다. 첫째, RSS 기반 셀인지 기술을 이용하여 실내 측위를 수행한 결과와 둘째, 스마트폰에 내장된 관성센서들을 활용한 PDR 기반의 측위 기술을 수행하고 이 2개의 기술을 융합하여 추정하는 실내 측위 방법이다. RSS 기반 셀인지 기술 및 스마트폰의 관성센서를 활용하는 방법에 대한 실내 측위 결과들이 속속 발표되고 있으나 측위를 수행한 실내환경 특성에 따라 측위 정확도 등 특성이 달라지는 결과를 초래하고 있어 실내 측위 정확도 및 성능에 대해 확실한 대안을 제시하지 못하고 있는 실정이다.
본고에서는 스마트폰을 이용하여 실내환경에 적합하게 전파신호세기가 미치지 못하는 음영지역에도 정확한 실내 측위가 될 수 있도록 LoS 및 NLoS 양쪽 측면을 모두 고려한 융합 측위 방안을 제시하였다.
향후 연구방향으로는 다양한 건물의 실내 특성 적용과 이를 효율적으로 측위할 수 있는 융합 알고리즘 개발 및 기능 구현, 정확도 검증 등이 뒤따라야 하며, 실제 경험 데이터를 활용(Empirical Research & Case Study)한 고정밀 실내 측위시스템 개발 및 경로안내서비스(Navigation), 지하시설물 추적관리서비스(Precise Tracking, Positioning System & Various Application Services) 개발 등 고정밀 실내 측위기술과 쉽게 접목할 수 있는 다양한 융복합 서비스로의 점진적 확장 및 활용이 필요하다.
약어 정리
3GPP
3rd Generation Partnership Project
AoA
Angle of Arrival
AP
Access Point
BSSID
Basic Service Set Identifier
DR
Dead Reckoning
EKF
Extended Kalman Filter
GPS
Global Positioning System
HAIP
High Accuracy Indoor Positioning
IMU
Inertial Measurement Unit
INS
Inertial Navigation System
IR
Infrared
IRB
Image Recognition Based Method
KF
Kalman Filter
KNN
K-Neighbor Node
LBS
Location Based Service
LoS
Line of Sight
LPP
LTE Positioning Protocol
LSE
Least Squire Estimation
MD
Mobile Device
MNN
Multiple Nearest Neighbor
MPLM
Multi Path Loss Model
MSSM
Maximum Signal Strength Model
NLoS
Non Light of Sight
PDR
Pedestrian Dead Reckoning
RP
Reference Point
RSS
Received Strength Signal
RSSI
Received Signal Strength Indication
SSID
Service Set Identifier
TDoA
Time Difference of Arrival
ToA
Time of Arrival
D. Kamisaka et al., “Design and Implementation of Pedestrian Dead Recking System on a Mobile Phone,” Proc. IEICE Trans., 2011, pp. 1137-1146.
E. Foxlin, “Pedestrian Tracking with Sheo-Mounted Inertial Sensors,” IEEE Comput. Graphics Appl., 2005, pp. 38-46.
김상일 외, “차세대 HPS(Hybrid Positioning System) 기술동향 및 향후 전망,” 한국통신학회, vol. 28, no. 7, 2011. 6. 30, pp. 44-51.
J. Seitzat et al., “A Hidden Markov Model for Pedestrian Navigation,” 2010 7th Workshop Positioning Navigation Commun.(WPNC), Mar. 2010, pp. 120-127.
김아솔, 황준규, 박준구, “AP 상대위치 정보를 고려한 향상된 WLAN RSSI 기반 실내 측위 알고리즘,” 제어로봇시스템학회, vol. 19, no. 2, 2013. 2, pp. 146-151.
H. Huang, “Post hoc Indoor Localization Based on RSS Fingerprint in WLAN,” Master of Science in Electrical and Computer Engineering, University of Massachusetts Amherst, Feb. 2014.
I. Sharp and K. Yu, “Enhanced Least-Squares Positioning Algorithm for Indoor Positioning,” IEEE Trans. Mobile Comput., vol. 12, no. 8, Aug. 2013, pp. 1640-1650.
H. Liu et al., “Survey of Wireless Indoor Positioning Techniques and Systems,” IEEE Trans. Syst., Man, Cybern., Part C: Appl. Rev., vol. 37, no. 6, Nov. 2007, pp. 1067-1080.
A. Aboodi and T.-C. Wan, “Evaluation of WiFi-based Indoor (WBI) Positioning Algorithm,” 2012 Third FTRA International Conf. Mobile, Ubiquitous, and Intelligent Comput., June 2012, pp. 260-264.
Y. Chen et al., “Power-Efficient Access-Point Selection for Indoor Location Estimation,” IEEE Trans. Knowl. Data Eng., vol. 18, no. 7, pp. 877-888.
V. Gupta and M.K. Rohil, “Information Embedding in IEEE 802.11 Beacon Frame,” IJCA Proc. National Conf. Commun. Technol. & its impact on Next Generation Comput. 2012, 2012.
A. Jime´nez et al., “A Comparison of Pedestrian Dead-Reckoning Algorithms Using a Low-Cost MEMS IMU,” IEEE International Symposium on Intelligent Signal Process., Aug. 2009, pp. 37-42.
J. Yu and J. Liu, “A KNN Indoor Positioning Algorithm that Weighted by the Membership of Fuzzy Set,” 2013 IEEE International Conf. Green Comput. Commun. IEEE Internet Things IEEE Cyber, Physical and Social Comput., IEEE Comput. Soc., Aug. 2013, pp. 1899-1903.
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.