
강군석 (Kang K.S.) 위성휴대방송통신연구실 책임연구원
장대익 (Chang D.I.) 위성휴대방송통신연구실 실장
안재영 (Ahn J.Y.) 위성무선융합연구부 부장
Ⅰ. 서론
무인기는 조종사가 탑승하지 않고 무선링크를 이용한 제어를 통해 조정이 가능하거나 자율적으로 비행하는 고정익 및 회전익 비행체를 총칭한다. 이러한 무인기는 과거 군용으로 국한되어 활용되었으나 최근 기술 발전에 힘입어 점차 민간용 시장으로 확대되고 있으며, 그 시장 규모가 급격히 성장할 것으로 예상된다[1]. 현재 운송, 통신중계, 교통감시, 산불감시·진화, 재해·재난대처, 생태계 모니터링, 국토·해양감시, 위험지역 정찰, 항공촬영, 과학임무(환경, 기상연구, 자원탐사) 등 다양한 민간·공공 분야에서 수요 증대가 전망되고 있다.
반면 현재 무인기는 제한된 공역에서 제한된 시간과 날씨에만 비행이 허가되는 등 특별한 상황에서만 비행 안전 관리가 이루어지고 있고, 항공교통관리 하에 공역에서의 무인기 비행은 예외적인 사례로 통상적인 절차에 의한 공역 비행은 실현되고 있지 않은 실정이다. 이는 무인기의 활용을 크게 제한하는 요인으로 무인기의 국가 공역으로의 진입을 위한 빠른 해결책이 요구되며, 이를 위해 무인기 인증과 운항 규칙 등의 제도 정비와 함께 안전성 확보를 위한 기술적 해결책 마련이 시급한 실정이다. 이러한 국가 공역으로의 안정적 진입을 위한 기술적 해결책으로 신뢰성 높은 무인기 제어용 통신링크 확보, 유인기 조종사에 의한 시각 감지 및 회피와 동일한 수준의 안전성을 제공하는 탐지회피 능력 확보, 유무인기 통합항공교통관리 등이 필수적으로 요구된다.
특히 고신뢰성 무인기 제어용 통신링크의 경우 현재까지 무인기 제어 전용 주파수 할당과 표준화된 통신 기술 및 장비 부재로 새로운 무인기 개발 때마다 임의로 상용 또는 자체 제작한 제어용 통신 장비를 실험국 형태로 운용하는 문제점이 있었다. 따라서 WRC(World Radio Conference)-12에서 무인기 안전운항을 위한 전용 주파수 분배가 이루어짐에 따라 무인기의 안정적 운용 및 시장 확대를 위한 무인기 제어 전용 주파수 활용 기반이 마련되었고, 전용 주파수 할당 및 효율적 활용, 표준화된 제어용 통신 기술 및 시스템 구축 필요성이 증대되고 있다.
이와 관련하여 미국을 중심으로 선진국에서는 무인기 수요 증대 및 기술 발전 추세에 따른 무인기의 국가 공역으로의 안정적 진입을 위해, 고신뢰성 제어용 통신 기술 개발 및 표준화를 이미 시작하였다. 미국의 경우 NASA(National Aeronautical and Space Administration)를 중심으로 무인기의 미국 공역 내의 안정적 진입을 목표로 하는 NextGen(Next Generation Air Transportation Systems) 프로젝트를 통해 고신뢰성 제어용 통신 기술 개발을 진행 중이며, NASA의 개발 기술 및 연구 결과는 현재 미국 항공무선기술 표준화 기구인 RTCA(Radio Technical Commission for Aeronautics)에서 진행 중인 무인기 제어용 통신링크 표준 개발에 적극 활용되고 있다[2]. 반면, 유럽 EC(European Commission)는 민간 무인기 관련 정책자문기구로 2012년 7월 ERSG(European RPAS Steering Group)를 설립하였고, ERSG 주도로 2013년 6월 무인항공기의 유럽 공역 내의 진입을 위한 R&D 로드맵을 발표한 바 있으며 제어용 통신 기술 개발이 포함되어 있다[3]. 유럽은 이와 같은 연구개발 로드맵을 실현하기 위해 Eurocontrol 등을 중심으로 SESAR(Single European SKY ATM(Air Traffic Management) Research) 프로젝트를 진행 중이며 프로젝트 결과는 유럽 항공장비기술 표준화 기구인 EUROCAE(European Organization for Civil Aviation Equipment)의 표준 개발에 적극 활용될 예정이다[4]. 마지막으로 국제민간항공기구인 ICAO(International Civil Aviation Organization)는 2007년부터 무인항공기 시스템 연구그룹(UASSG: Unmanned Aircraft System Study Group)을 결성하여 무인항공기 관련 업무에 대한 국제적 상호협력, 무인기 관련 규정 및 매뉴얼 개발, 기술적 세부사항과 SARPs(Standards and Recommended Practices)의 개정에 대한 연구를 진행 중이며 기술적 세부사항 연구는 RTCA와 EUROCAE을 통해 진행하기로 하였다[5].
따라서, 본고에서는 무인기 제어용 통신 기술의 개요를 간단히 언급하고 국가 공역으로의 안정적 진입 및 무인기 응용 확대를 위한 무인기 제어용 통신 기술 주요 이슈 사항에 대해 살펴본다. 다음으로 무인기 제어용 통신 기술 및 표준화 동향을 간단히 살펴본 후, 고신뢰도 제어를 위한 기술적 및 표준화 이슈를 제시하고자 한다.
Ⅱ. 기술 개요
무인기와 함께 이륙/항행, 비행통제, 착륙/회수 등 제어용 통신시스템을 포함한 전 비행 과정에 필요한 모든 구성 요소를 모두 포괄해 무인항공시스템(UAS: Unmanned Aircraft System) 또는 원격조종항공시스템(RPAS: Remotely Piloted Aircraft Systems)이라 한다. 이러한 무인항공시스템은 (그림 1)과 같이 무인기, 지상 통제장비, 그리고 데이터 링크로 구성되며, 데이터 링크는 지상 무선국과 무인기 간의 무선 데이터 링크와 위성을 통한 위성 데이터 링크로 구분할 수 있다.
")
UAS 데이터 링크는 (그림 2)와 같이 크게 UAS 지상 제어 및 비임무용(CNPC: Control and Non-Payload Communication) 데이터 링크와 UAS 임무용 링크로 구분할 수 있다. 임무용 데이터 링크는 임무 수행과 관련된 데이터를 전달하기 위한 링크로서 일반적으로 CNPC 데이터 링크보다 광대역이다. 반면 CNPC 링크는 무인기 비행 제어, UAS 상태 모니터링, CNPC 링크 관리와 관련된 데이터를 전달하기 위한 링크로서 조종사/ATC(ATC: Air Traffic Control) 중계 링크와 UAS 제어 링크로 구성된다. 조종사/ATC 중계 링크는 항공교통관제센터와 조종사 간의 음성 및 데이터를 무인기를 통해 중계하기 위한 통신 링크이며, UAS 제어 링크는 조종사와 무인기 간의 안전 운항 관련 제어 정보를 전달하기 위한 링크이다. UAS 제어 링크의 경우 다시 원격명령(TC: Telecommand) 링크와 원격측정(TM: Telemetry) 링크로 구분할 수 있으며, TC 링크는 비행궤도 제어 정보, 안정 비행에 요구되는 모든 무인기 시스템 제어 정보 등을 지상의 조종사로부터 무인기로 전달하는 상향링크이고 TM 링크는 무인항공기 위치/고도/속도, UAS 시스템 동작 모드 및 상태, 항법 보조 데이터, 탐지 및 회피 관련 추적/기상레이더/영상 정보를 무인기에서 지상의 조종사에게 전달하는 하향링크이다.
")
현재 위성 데이터 링크보다는 지상 데이터 링크에 대한 기술 및 표준화가 보다 활발히 진행 중이기 때문에, 본고에서는 무인기 제어용 통신 기술로서 주로 (그림 2)의 UAS 지상 데이터 링크 중 지상 CNPC 링크에 해당하는 기술을 다룬다.
Ⅲ. 국내외 기술개발 현황
1. ITU-R 무인기 제어 전용 주파수 현황
국제전기통신연합(ITU: International Telecommunications Union)는 관련 연구그룹에서 WRC-12 의제 1.3에 따라 무인기 제어용 주파수 요구사항 관련 연구를 통해 무인기 CNPC 링크 제공 서비스를 도출하고, 도출 서비스의 필요 데이터양과 UAS 운용 시나리오(운용 고도, 무인기 수 및 분포, 셀 크기, 주파수 재사용 방법 등)를 고려하여 무인기 CNPC 링크 스펙트럼 소요량을 계산하였다. ITU-R(ITU Radio Sector) 보고서 M.2171에 따르면 지상 CNPC 링크와 위성 CNPC 링크를 위한 주파수 소요량은 각각 34MHz(상향: 4.6MHz, 하향: 29.4MHz)와 46MHz(리턴링크: 18.9×2MHz, 포워드링크: 4.1×2MHz)로 예측되었다[6]. 이를 바탕으로 ITU는 2012년 개최된 세계전파통신회의(World Radiocommunication Conference-12, 이하 WRC-12)에서 항공이동업무용(무인기 지상 제어용) 주파수를 C 대역(5030~5091MHz)으로 61MHz 대역폭을 신규 분배하였다.
또한, WRC-12에서 전파규칙 개정에 따라 960~ 1164MHz 대역에서 기존의 항공무선항행 시스템에 혼신을 주지 않는 조건하에 신규 항공통신 시스템(무인기 지상 제어용)의 사용이 가능하게 되었다. 그러나 L 대역의 경우 기존 항공 시스템이 혼재되어 운용되고 있어서 글로벌하게 사용될 수 있는 무인기 제어용 주파수 확보가 어려울 수 있다.
마지막으로 2015년 개최될 WRC-15에서 고정위성업무용으로 분배된 주파수의 위성 CNPC 링크 이용 가능성 검토를 위해, 현재 ITU 관련 연구그룹은 WRC-15 의제 1.5에 따라 Ku-대역(10.95~14.5GHz) 및 Ka-대역(17.8~20.2GHz, 27.5~30GHz)의 고정위성업무 주파수를 이용한 무인기 제어를 위한 기술적, 운용적, 규정적 검토를 수행 중이다.
2. 미국
2013년 11월 미국연방항공청(FAA: Federal Aviation Administration)은 민간 무인기 공역 통합 로드맵을 발표한 바 있으며, NASA를 중심으로 무인기의 미국 공역 내 안정적 진입을 목표로 하는 NextGen 프로젝트를 통해 제어용 통신 기술, 탐지·회피 기술 등의 연구개발을 진행 중이다. 무인기 관련 NextGen 프로젝트는 무인기를 국가 공역체계에 완전히 통합하여 운용할 수 있도록 하는 계획으로, 프로젝트 내에서 CNS(Communication Navigation Surveillance)에 대한 연구가 진행 중이다.
NASA는 끊김 없고 신뢰성 높은 제어용 통신 링크 제공을 위해 지상과 위성 기반 통합 네트워크를 고려하고 있으며, 현재는 지상 CNPC 링크에 대한 연구가 진행 중으로 통신의 신뢰성을 확보하기 위해 L 대역을 주 대역으로 하고 C 대역을 보조 대역으로 하는 IEEE(Institute of Electrical and Electronics Engineers) 802.16 기반 무인기 지상 제어용 통신 링크 기술을 2016년 완료를 목표로 개발 중이다. 이를 위해 NASA에서는 Rockwell Collins와 함께 SWaP-C(Size Weight and Power-Cost), 시스템 용량, 복잡도 등 다양한 측면에서 지상 CNPC 링크 waveform trade study를 수행하여 상향링크 TDMA(Time Division Multiple Access), 하향링크 FDMA(Frequency Division Multiple Access) 접속방식을 갖는 TDD(Time Division Duplex) 기반의 후보 waveform 기술을 도출한 바 있다[7]. 이를 바탕으로 L 대역용 지상 제어용 통신 모듈 시제품 개발을 이미 완료하였으며, 현재 C 대역용 무인기 지상 제어용 통신링크 채널 모델 및 시제품을 개발 중이다. 또한, 아직 초기 단계이지만 NASA는 네트워크 기반 무인기 제어용 통신 기술에 대한 연구개발도 진행 중이다.
이러한 NextGen 프로젝트를 통한 NASA의 연구 및 기술 개발 결과는 현재 미국 RTCA에서 진행 중인 무인기 제어용 통신링크 및 충돌회피 기술 표준 개발에 적극 활용되고 있다.
3. 유럽
유럽 EC(European Commission)는 민간 무인기 관련 정책자문 기구로 2012년 7월 ERSG를 설립하였고, ESRG 주도로 2013년 6월 무인기의 유럽 공역 내의 진입을 위한 연구개발 로드맵을 발표하였다. 로드맵의 주요 내용으로 제어용 통신 기술, 지상 및 항공기반 충돌회피 기술, 지상 장애물 탐지·회피 기술 등을 포함하고 있다. 유럽은 이러한 연구개발 로드맵을 실현하기 위해 Eurocontrol 등을 중심으로 유럽 전 공역을 기술적, 경제적, 법제적 관점에서 단일 공역으로 통합하는 것을 목표로 하는 SESAR 프로젝트를 진행 중이다. 또한, 이와는 별도로 영국 정부와 BAE(British Aerospace) systems, Thales UK, EADS(European Aeronautic Defence and Space)와 같은 산업체는 ASTRAEA(Autonomous Systems Technology Related Airborne Evaluation & Assessment) 프로그램을 통해 2006년부터 민간 공역 진입을 위한 무인기 연구를 진행 중이며, 통신/보안/주파수 분야와 충돌 회피 분야의 연구를 포함하고 있다.
반면, 민간 공역 내 안정적 진입을 위한 위성 제어용 통신 기술의 경우는 ESA(European Space Agency)를 주축으로 우주개발 및 활용과 관련된 무인항공기 프로그램을 별도로 진행하고 있다.
4. 국내
국내의 경우, 무인기 제어 전용 주파수 국내 할당과 표준화된 통신 기술 및 장비가 부재한 상태이다. 현재 무인기 제어를 위해서는 기존의 항공이동업무용으로 분배된 주파수를 이용하는 상황으로 WRC-12에서 분배된 신규 무인기 지상 제어 전용 C 대역 주파수를 국내에서도 용도 지정하였으나, 세부 주파수 이용기준이 없기 때문에 KARI(Korean Aerospace Research Institute) 및 KAI(Korea Aerospace Industries) 등은 민간차원의 실험 무선국 주파수로 이용 중이다. 이에 따라 새로운 무인기 개발 때마다 표준화된 장비 없이 임의로 제어용 상용 통신 장비를 도입하여 운용하는 상황이다. 따라서, 무인항공기 안전운항을 위한 제어 전용 주파수에서의 표준화된 통신 기술 및 시스템 구축 필요성이 대두되고 있으나 2014년까지 무인항공기 안전운항을 위한 제어전용 통신 기술에 관한 본격적인 연구 및 개발이 추진된 바가 없다.
Ⅳ. 국내외 표준화 현황
1. 미국
2013년 구성된 RTCA 특별위원회(SC)-228에서는 무인항공기시스템 제어용 통신링크 및 충돌회피 기술에 대한 최소운용성능 표준(MOPS: Minimum Operation Performance Standard)을 개발 중이고, 무인기 제어용 통신 기술 표준화는 SC-228 산하 C2(Command and Control) 작업반(WG(Working Group)-2)에서 진행 중이다. 현재 SC-228 산하 WG-2 작업반에서는 무인기 제어용 통신링크에 대한 MOPS 표준을 개발 중이며, 이중 무인기 제어용 지상 통신링크 MOPS 표준은 2015년 중순 초안, 2016년 중순 완료를 목표로 하고 있고, 무인기 제어용 위성 통신링크 MOPS 표준은 2016년 중순 이후 개발을 시작할 예정이다[8].
현재 무인기 제어용 지상 통신링크 MOPS 표준 개발을 위해 무선인터페이스 성능 요구사항, 주파수 재사용 방법, 동적 스펙트럼 할당 방법, 검증 및 인증 방법 등에 대한 논의가 진행 중이다. 현재는 주로 P2P(Point-to-Point)용 MOPS 표준 개발이 진행 중이나 궁극적으로 무인기의 국가 공역으로의 안정적 진입을 위해서는 네트워크형 무인기 제어용 통신링크 기술에 대한 표준화도 진행될 것으로 예상하고 있다. 제어용 통신링크의 가용도를 높이기 위해 L 대역을 주 대역으로 하고 C 대역을 보조 대역으로 하여 독립적으로 운용하는 것을 고려하고 있다[9].
NASA와 Rockwell Collins사가 공동 개발하고 있는 L 및 C 대역에서 동작하는 TDD 기반 제어용 무선인터페이스가 MOPS 표준에 반영될 예정이나 현재는 물리계층 규격만을 정의하고 있다. 그러나 네트워크형 무인기 제어용 통신링크를 위해서는 물리계층뿐만 아니라 상위계층에 대한 규격 정의도 추가적으로 필요할 것으로 예상한다.
향후 RTCA에서 개발될 무인기의 안정적 운용 관련 MOPS 표준을 바탕으로 FAA는 무인항공기 관련 기술표준규칙(TSO: Technical Standard Order)을 제정할 예정이며 또한, RTCA의 기술 표준화 결과는 ICAO의 무인항공기 및 시스템 관련 SARPs 개발에 반영될 예정이다.
2. 유럽
통상적으로 유럽 EUROCAE는 항공기 시스템의 운용 및 안전 성능 요구사항, 상호 운용성 요구사항, 항공기 시스템 및 운용 최소 요구사항 표준을 개발하여 유럽연방항공청(European Aviation Safety Agency)에 제언한다. 현재 EUROCAE 산하 작업반 WG-73과 WG-93에서 각각 중대형 무인기와 소형 무인기의 유럽 공역 내의 안정적 진입을 위한 표준 및 권고 개발을 진행 중이나 아직 구체적 활동은 미미한 상태이다.
3. ICAO
국제민간항공기구인 ICAO는 2007년부터 무인항공기시스템 연구그룹인 UASSG을 결성하여 무인항공기 관련 업무에 대한 국제적 상호협력, 무인기 관련 규정 및 매뉴얼 개발, 기술적 세부사항과 SARPs의 개정에 대한 연구를 진행 중이다. 무인기 운용에서의 기술적 세부사항은 RTCA와 EUROCAE의 연구 결과를 준용하기로 하였으며 이에 따라 RTCA의 기술 표준화 결과는 ICAO의 UAS 관련 SARPs에 반영될 예정이다.
미국과 유럽은 (그림 3)과 같이 미국 NextGen 프로젝트와 유럽 SESAR 프로젝트를 바탕으로 무인항공기 안전운항을 위한 기술 개발 및 RTCA/EUROCAE 표준화 협력을 통해, 무인기 시스템 기술 표준 단일화를 모색 중이며 ICAO를 통해 전 세계 무인항공기 상호 운용성 확보를 추진 중이다.
")
Ⅴ. CNPC 기술 주요 이슈
Ⅱ장에서 언급한 바와 같이 무인기 지상 CNPC 링크를 위한 주파수로는 WRC-12에서 신규 전용 대역으로 분대된 C(5030~5091MHz) 대역과 WRC-12에서 항공이동업무로 활용할 수 있도록 기준이 마련된 L(960~ 1164MHz) 대역이 주로 고려되고 있다. L 대역의 경우 C 대역에 비해 전파 특성이 좋으나(C 대역에 비해 14dB 정도 전파 손실 낮음), DME(Distance Measurement Equipment), ADS-B(Automatic Dependent Surveillance–Broadcast), TACAN(Tactical Air Navigation System) 등 기존 항공 시스템들이 L 대역에서 혼잡하게 운용되고 있어 주파수 확보에 어려움이 있다. 이에 반해 C 대역의 경우 링크마진 확보를 위해 지향성 안테나 사용이 고려되어야 하고 도플러 영향이 L 대역에 비해 5배가 큰 단점이 있으나 기존 시스템과의 주파수 혼신 영향이 적은 장점이 있다. UAS는 L 및 C 대역 중 하나의 대역을 활용할 수도 있으며, 지상 CNPC 링크의 신뢰성을 높이기 위해 L 및 C 대역을 이중으로 이용할 수도 있다. 예를 들어 소형 무인기의 경우 L 대역을 이용하여 99.8% 가용도를 가지는 지상 CNPC 링크를 지원하고, 중대형 무인기의 경우 각 링크에서 99.8% 링크가용도를 가지는 L 및 C 대역을 이중으로 독립적으로 이용하여 99.999%의 링크 가용도를 가지는 지상 CNPC 링크를 지원할 수 있다[8].
다음으로 지상 CNPC 링크 접속 형태의 경우, 지상 CNPC 링크는 (그림 4)와 같이 P2P형과 네트워크형을 고려할 수 있다. P2P형은 하나의 통제소(CS: Control Station)가 직접 무인기와 데이터 링크를 형성하는 개념으로 기존 무인항공시스템에서 주로 고려되었던 형태이다. 이에 반해, 네트워크형은 지상 무선국(GRS: Ground Radio Station)들이 네트워크에 연결되어 있고 각 CS는 지상 네트워크와 GRS를 통해 무인기와 정보를 교환하는 형태로서 공공 및 민간 무인기의 응용 확대를 위해서는 다수 무인기와 동시에 통신링크를 형성할 수 있는 GRS와 전국 커버리지의 통신 네트워크가 필수적으로 필요하다.
")
또한, 앞 단락에서 언급한 바와 같이 무인기의 안정적 운용 및 무인기 수요 확대를 위해서는 제한된 무인기 제어 전용 주파수 대역에서 다수의 무인기를 효율적으로 운용할 수 있는 무인기 제어용 통신 주파수 자원의 효율적 활용 기술이 필요하다. 이를 위해 무인기 클래스별 수직적/수평적 분포, 셀 당 GRS 위치, 셀 크기, 무인기 클래스별 요구 전송속도 등을 고려하여 최적의 3차원 셀 설계 및 스펙트럼 재사용 방식 적용을 고려할 수 있다. (그림 5)는 고도에 따라 다른 스펙트럼 재사용률을 가지는 3차원 셀 설계의 예를 보여준다.
")
무인기는 다양한 고도에 분포하며 일반적으로 특정 항로에서 운행하기 때문에 비균일 분포를 가진다. 그리고 네트워크에 연결된 GRS는 각 셀의 중심 지역에 위치시키는 것이 가장 좋으나, P2P 기반의 GRS는 셀 가장자리에도 위치할 수 있으므로 보다 큰 인접 셀 간 간섭을 야기할 수 있다. 또한, 셀 크기를 작게 하면 스펙트럼 재사용 효율이 높아지나 무인기 속도 및 고도 변화 시 잦은 핸드오버가 필요하고, 고도가 높을수록 인접 셀 간섭을 피할 수 있도록 낮은 스펙트럼 재사용률이 필요할 수 있다.
제한된 무인기 전용 스펙트럼의 효율적 이용을 위해 무인기 제어용 통신에서 고려해야 할 또 다른 부분은 무인기 제어용 스펙트럼 할당 및 관리 방안이다. 무인기 제어용 통신링크의 스펙트럼은 관련 주관청에 의해 관리 및 할당될 것으로 예상되며, 한정된 스펙트럼의 효율적 사용 및 무인기의 안정적 운용을 위해서는 스펙트럼의 동적 할당 및 재사용 방식 적용이 필요할 수 있다. 제어용 통신링크 스펙트럼은 일정 기간(한 달, 하루, 또는 1회의 비행 기간) 동안 고정적으로 할당될 수 있고, GRS의 실시간 할당 요청에 따라 네트워크를 통해 동적으로 할당될 수도 있다[10]. 예를 들어, P2P 기반 제어용 통신링크의 스펙트럼 할당은 (그림 6)과 같이 GRS와 주관청 사이가 지상 네트워크로 연결되어 있을 경우 네트워크를 통해 요청하고, 네트워크 연결이 없을 경우에는 전화 등을 통해 할당 신청하는 것을 고려할 수 있다.
")
반면, 네트워크 기반 제어용 통신링크에서의 스펙트럼 할당은 GRS의 능력(capability) 및 지상 인프라 이용 가능성 등에 따라 GRS의 직접 요청에 따른 할당[(그림 7 a) 참조], 서비스 제공자에게 상시 주파수 할당[(그림 7 b) 참조], 서비스 제공자 네트워크를 통한 GRS의 요청에 따른 할당, 서비스 제공자 네트워크를 통한 개별 무인기의 요청에 따른 할당 방식을 고려할 수 있다.
")
마지막으로 네트워크 기반 무인기 제어용 통신의 경우 민간 공역 내에서 무인기 안정적 운용을 위한 끊김 없는 통신링크 지원을 위해, (그림 8)과 같이 무인기의 이동에 따라 동일 CNPC 네트워크 내의 GRS 간 핸드오버, 또는 다른 CNPC 네트워크의 GRS 간 핸드오버가 요구된다.
")
V. 결론
지금까지 무인기 제어용 통신 기술 개발 및 표준화 동향에 대해 살펴보았다. 무인기 기술의 발전에 따른 무인기의 민간 및 공공 수요 확대를 고려할 때, 무인기의 국가 공역에서의 운용이 임박하고 있으므로 이에 대한 준비가 요구된다. 무인기의 국가 공역으로의 안정적 진입을 위해서는 높은 수준의 안정성을 제공하는 탐지·회피 능력 확보와 함께 신뢰성 높은 무인기 제어용 통신링크 확보가 필수적이다. 이에 따라 WRC-12에서의 무인항공기 제어용 전용 신규 주파수 분배에 따른 무인기 제어 전용 표준화된 통신 기술 개발 및 시스템 구축 필요성이 증대되고 있다. 이를 위해 제어용 통신의 신뢰성을 확보하기 위한 무인기 제어 전용 주파수 할당이 필요하며, 공공 및 민간 무인항공기의 응용 확대를 위해서는 다수 무인기 제어를 위한 표준화된 제어용 지상 통신 기술, 전국 커버리지의 무선통신 네트워크 구축, 최적 스펙트럼 할당 및 주파수 재사용 방안 등이 필수적으로 고려되어야 할 것으로 보인다. 또한, 산간 지역 등 전파음역 지역으로의 커버리지 확장을 위한 리피터/릴레이 등 지상 중계 기술 및 지상무선통신 커버리지를 벗어난 초가 기선 영역에서의 무인기 제어 중계를 위한 위성통신 기술도 필요할 것으로 판단된다. 마지막으로 글로벌 무인기 제어용 통신 기술 시장 진입 및 선점을 위해서는 NASA 등 선진기관과의 협력과 국제표준화 단체에서의 적극적인 활동을 통한 기술 개발 가속화 및 개발 기술의 국제표준화 추진이 필요하다. 특히, 네트워크 기반의 무인기 제어용 통신 기술 개발 및 표준화는 아직 초기 단계에 있으므로 관련 표준화 선도 및 시장 선점 가능성이 높을 것으로 예상된다.
약어 정리
ADS-B
Automatic Dependent Surveillance-Broadcast
ASTRA
Autonomous Systems Technology Related Airborne Evaluation & Assessment
ATC
Air Traffic Control Centre
ATM
Air Traffic Management
BAE
British Aerospaces
C2
Command and Control
CNPC
Control and Non-Payload Communications
CNS
Communications Navigation Surveillance
CS
Control Station
DME
Distance Measurement Equipment
EADS
European Aeronautic Defence and Space
EASA
European Aviation Safety Agency
EC
European Commission
ESA
European Space Agency
EUROCAE
European Organization for Civil Aviation Equipment
ERSG
European RPAS Steering Committee
FAA
Federal Aviation Administration
FDMA
Frequency Division Multiple Access
GRS
Ground Radio Station
ICAO
International Civil Aviation Organization
IEEE
Institute of Electrical and Electronics Engineers
ITU
International Telecommunications Union
ITU-R
ITU Radio Sector
KAI
Korea Aerospace Industries
KARI
Korean Aerospace Research Institute
MOPS
Minimum Operation Performance Standard
NASA
National Aeronautics and Space Administration
NextGen
Next Generation Air Transportation Systems
P2P
Point-to-Point
RPAS
Remotely Piloted Aircraft Systems
RTCA
Radio Technical Commission for Aeronautics
SARPs
Standards and Recommended Practices
SESAR
Single European SKY ATM Research
SWaP-C
Size Weight and Power–Cost
TACAN
Tactical Air Navigation System
TC
Telecommand
TDD
Time Division Duplex
TDMA
Time Division Multiple Access
TM
Telemetry
TSO
Technical Standard Order
UAS
Unmanned Aircraft System
UASSG
Unmanned Aircraft System Study Group
WG
Working Group
WRC
World Radio Conference
References
(그림 1)
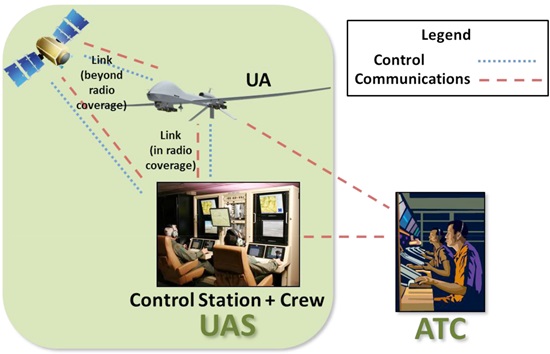
무인항공시스템 (UAS) 구성요소<a href="#r009">[9]</a>
(그림 2)
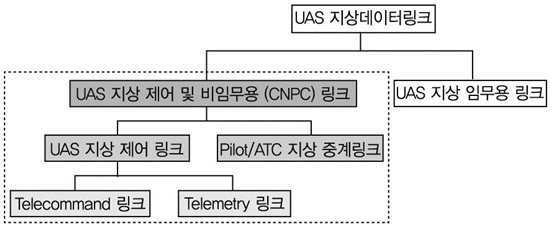
UAS 데이터 링크
(그림 3)
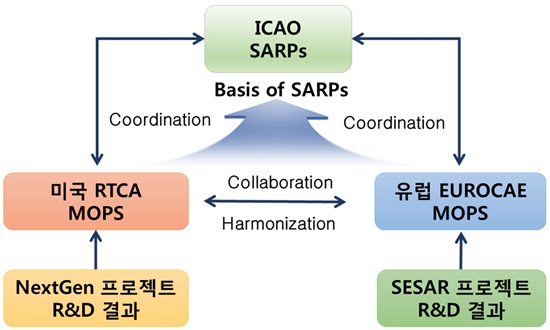
ICAO/RTCA/EUROCAE 관계
(그림 4)
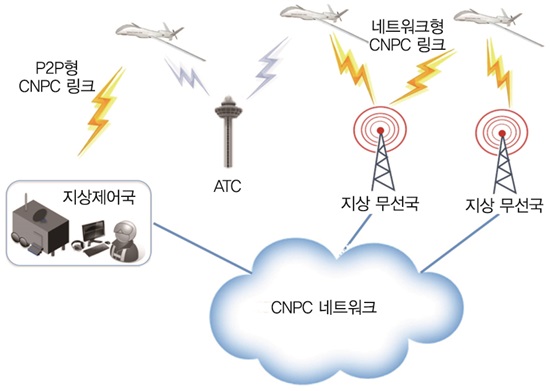
P2P 및 네트워크 형 지상 CNPC 링크
(그림 5)
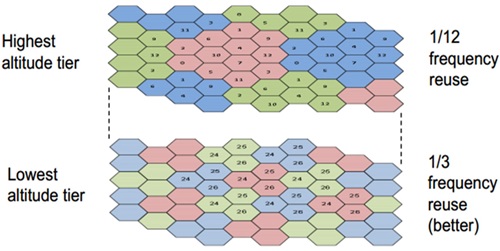
3차원 기반 셀 설계 예<a href="#r009">[9]</a>
(그림 6)
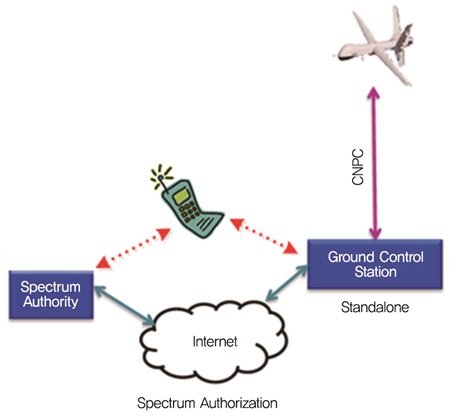
P2P CNPC 링크 스펙트럼 할당 예<a href="#r010">[10]</a>
(그림 7)
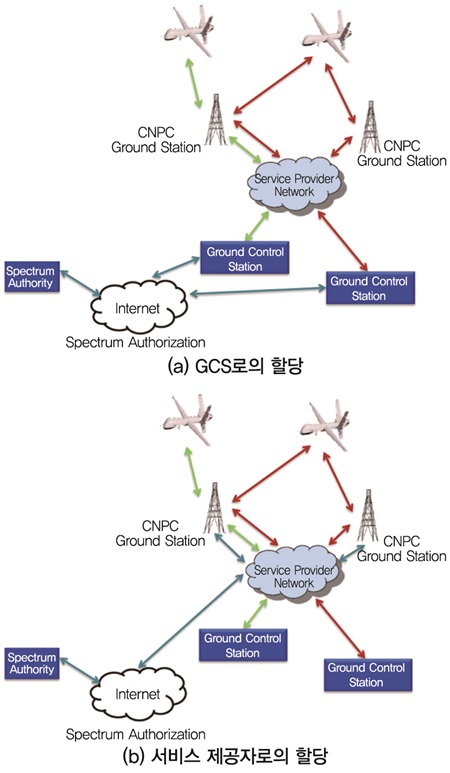
CNPC 네트워크 스펙트럼 할당 예<a href="#r010">[10]</a>
(그림 8)
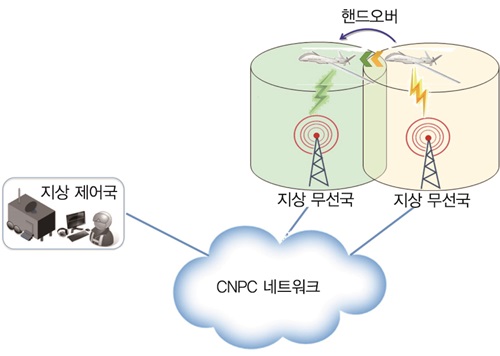
지상 CNPC 링크 핸드오버 개념