지중탐지 레이더 기술동향 분석
Analysis of Ground Penetration Radar Technology Trend
- 저자
- 김동규 / 융합기술미래연구팀
- 권호
- 30권 5호 (통권 155)
- 논문구분
- ICT 융합기술 R&D동향 특집
- 페이지
- 22-27
- 발행일자
- 2015.10.01
- DOI
- 10.22648/ETRI.2015.J.300503
- 초록
- 도로함몰 사고 증가를 계기로 지하 구조물의 안전 관리 방법, 특히 비파괴 검사 장비에 대한 관심이 고조되고 있다. 지중투과 레이더 기술은 전자파의 투과, 반사 특성을 이용한 비파괴 검사 기술로써 투과 깊이, 투과 해상도 등 비파괴 검사 성능 측면에서 가장 주목받고 있는 기술이다. 본고에서는 지중투과 레이더 기술의 특징, 국외 제품 동향을 살펴본다.
Share
Ⅰ. 머리말
2000년도 이후 국내에서 도로함몰 발생 사고는 급격하게 증가하고 있다. 국내에서는 이를 편의상 흔히 ‘싱크홀’이라고 부르고 있는데 싱크홀은 도로뿐 아니라 지반이 약한 지형에서는 어디서든 발생할 수 있는 지반함몰 현상을 통칭하는 것이다. 국내에서는 유독 차도, 인도 등 도로나 그 주변에서 이러한 현상이 집중적으로 발생하고 있다. 싱크홀의 발생 원인은 자연적 원인과 인위적 원인으로 구분되며, 국내 싱크홀 사고의 경우 대부분이 인위적 원인에 의해 발생하는 것으로 분석되고 있다. 서울시의 도로 시설물은 준공된 지 20년이 넘는 시설물이 전체의 절반을 넘는 수준이며, 자동차 전용 대로와 같이 비교적 구조가 단순하고 체계적인 시설물은 전체의 20%에 불과하다. 반면에 주택가 도로, 이면도로, 인도 등 도로폭이 좁고 노후화 진행도가 높으면서 복잡하게 얽힌 구조를 가진 도로 시설물이 전체의 80%를 차지하고 있으며, 이러한 도로 시설물상에서 도로함몰 사고의 85% 이상이 발생하는 것으로 파악되고 있다.
도로함몰 사고의 가능성을 검사하기 위해서는 초음파법, 자기법, 충격파법, 방사선법, 전자기파법 등 다양한 비파괴 검사 방식이 활용될 수 있다. 최근 국내에서는 그중에 전자기파법의 일종인 지중탐지 레이더 기술 (Ground Penetration Radar: GPR)에 대한 관심도가 증가하고 있다. 지중탐지 레이더 기술은 전자기파의 투과 및 반사 특성을 이용하여 지하의 내부 구조를 측정하는 방법이며, 포장도로 내부 상태분석, 콘크리트 철근 상태분석, 철로 밸러스트 상태분석, 지뢰탐지 등 다양한 비파괴 검사 분야에 응용되고 있다. 본고에서는 지중탐지 레이더 기술의 특징, 국외 제품 동향을 중심으로 기술하고자 한다.
Ⅱ. 기술 특징
지중탐지 레이더 기술 방식은 신호의 생성 방식에 따라 구분할 수 있으며, 자세한 설명은 다음과 같다.
1. Pulse-train GPR
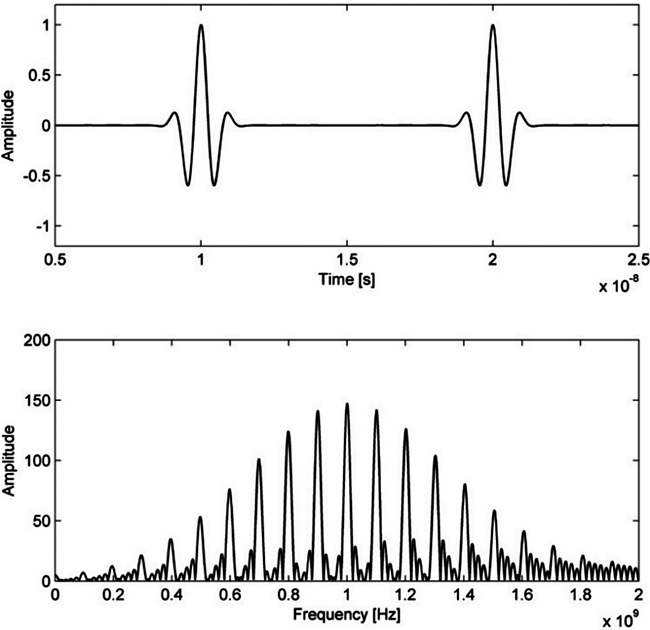
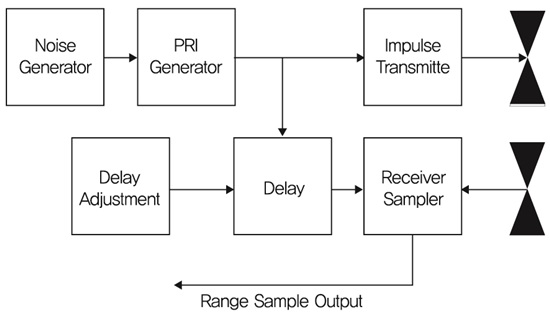
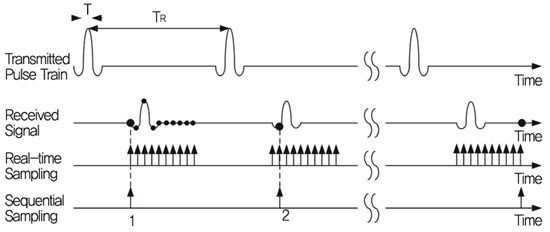
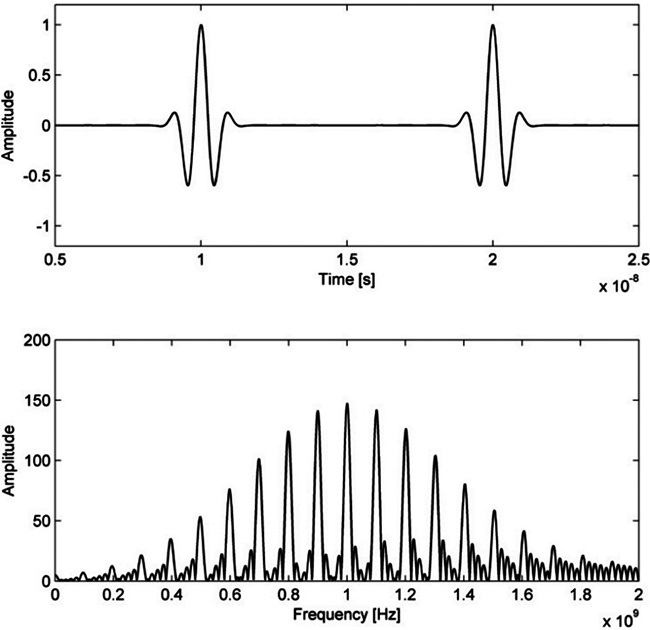
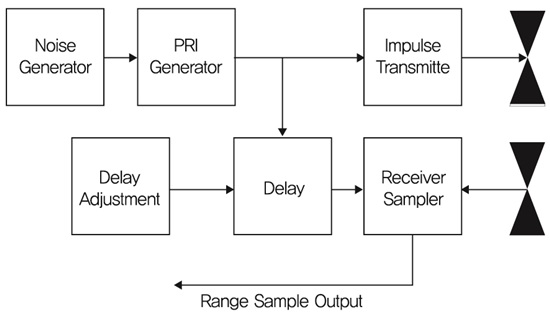
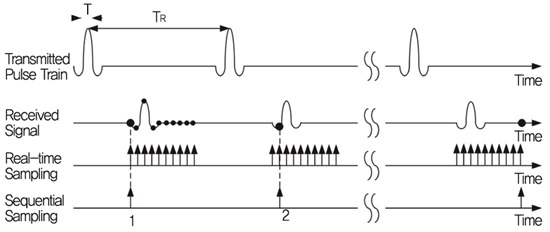
Pulse-train GPR 기술은 초광대역 펄스열을 생성하는 방식이며, 일반적으로 펄스폭은 수 nsec 이내, 펄스 간격은 수십 nsec~수 usec 내외로 구성된다[(그림 1) 참조]. 특정 지점에 대한 투과 탐지 신호 하나를 얻기 위한 동작을 단위 스캔이라고 한다. 단위 스캔을 수행하기 위해서는 하나의 펄스열이 필요하며 이를 단위 펄스열이라고 한다. 단위 펄스열은 대개 64개에서 4,096개의 펄스로 구성된다. 단위 펄스열 당 펄스의 수가 작은 경우 단위 스캔에 소요되는 시간이 단축되는 장점이 있는 있으나, 스캔 응답 신호의 사양, 즉 샘플링률과 스캔 응답 시간 범위가 떨어지는 단점이 존재한다. 반면에 단위 펄스열 당 펄스의 수가 클 경우, 스캔에 소요되는 시간이 길어지는 단점이 있으나, 스캔 응답 신호의 사양이 향상된다. 따라서 탐지에 요구되는 속도, 얻고자 하는 스캔 응답 신호의 사양에 따라 펄스열 당 펄스의 수를 조절해야 한다. Pulse-train GPR 시스템의 구조는 (그림 2)와 같다. 송신부는 펄스열 생성부, 임펄스 송신부로 구성되며, 수신부는 수신 샘플러, 지연기로 구성된다. 송신부에서 펄스열 생성부는 앞서 기술한 펄스열을 사양에 맞게 송신되도록 제어한다. 임펄스 송신부는 펄스열 생성부의 펄스 송신 명령을 받을 시 펄스를 안테나 포트로 송신한다. 임펄스 송신부는 n-th derivative Gaussian 펄스를 생성하는 회로로 구현되는데, 높은 출력 전력을 동반할 수 있는 아날로그 소자로 구성한다. 수신부에서 지연기는 펄스열 생성부의 제어 특히 펄스 간 간격 제어에 맞도록 수신 샘플러의 시간 지연을 구현하는 기능을 가진다. 수신 샘플러는 지연기에서 생성되는 타이밍에 수신 신호를 샘플링하는 A/D 변환이다. Pulse-train GPR 시스템 수신기의 가장 큰 특징은 지연기와 수신 샘플러가 등가 시간 A/D 변환 기능을 수행한다는 점이다. (그림 3)에서와 같이 등가 시간 A/D 변환 기능은 Pulse-train과 시간이 동기화된 상태에서 수신 샘플러보다 더 고속의 A/D 변환을 수행할 수 있는 방식이다. 등가 시간 A/D 변환의 사양을 향상시키기 위한 방법은 스캔 응답 신호 사양을 향상시키는 방법과 동일하다. 요컨대, Pulse-train GPR 기술은 첫째, 송신부의 임펄스 송신기가 생성하는 개별 펄스의 품질과 둘째, 송신부 펄스열 생성기의 설정과 수신부 등가 시간 A/D 변환 성능에 따라 결정된다.
추가로 Pulse-train GPR 기술이 일반적으로 고속 스캔에 유리하다고 평가받고 있는데, 지금까지 기술한 내용에서 보듯이 고사양의 스캔 응답 신호를 얻기 위해서는 긴 펄스열을 사용해야 하므로 스캔 속도와 스캔 응답 신호의 사양 간의 절충이 필요하다.
2. Stepped-frequency GPR
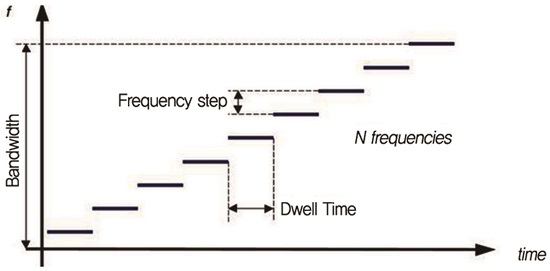
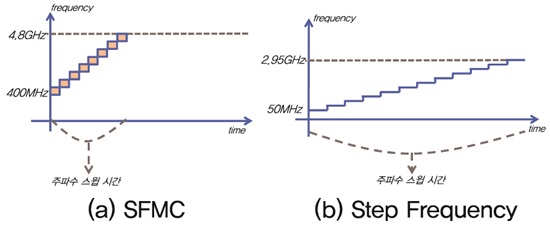
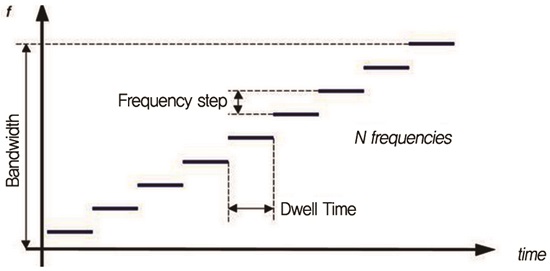
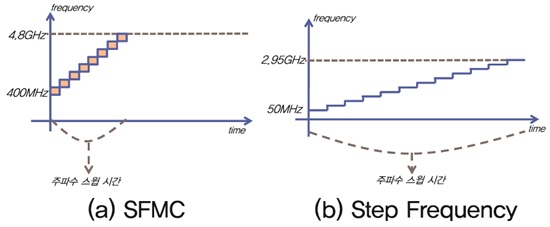
한순간에 초광대역 신호를 생성해야 하는 Pulse-train GPR 기술과는 달리, Stepped-frequency GPR 기술은 (그림 4)와 같이 한 순간(그림에서 Dwell time)에 특정 주파수의 협대역 톤 신호를 생성하고 주어진 대역폭(그림에서 Bandwidth) 내에서 톤 주파수를 계단형으로 제어하는 방식으로 초광대역 신호를 합성하여 생성하는 방식을 사용한다.
Dwell time, bandwidth, frequency step에 따라 초광대역 신호 생성의 시간이 결정되는데, Bandwidth가 동일한 조건에서는 일반적으로 Stepped-frequency GPR이 Pulse-train GPR보다 스캔 속도가 떨어진다.
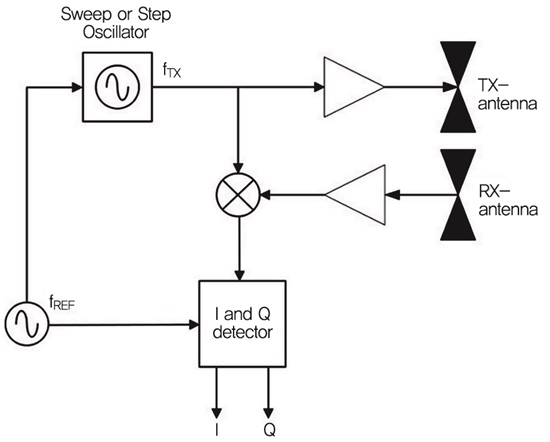
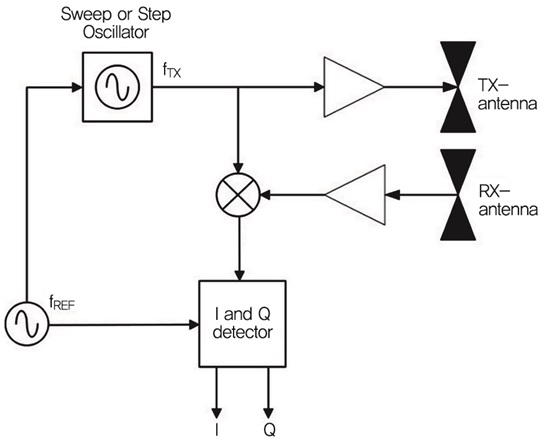
Stepped-frequency GPR 송수신기의 구조는 (그림 5)와 같이 비교적 간단하다. 좋은 성능을 위한 조건은 기준 오실레이터의 품질(예, 위상잡음지수), 송신부에서 수신부로의 전파 유입량, 주파수 스위칭 속도 등이 있다. Stepped-frequency GPR 기술의 장점은 초광대역의 스캔 응답 신호에 대한 주파수 세기 및 위상 정보를 동시에 획득할 수 있으며, 송신부에서 이 두 가지에 대한 자유로운 성형이 가능함에 있다. 즉, 송신 신호 스펙트럼의 자유로운 성형과 수신 신호의 크기 및 위상 정보의 이용을 통해 Pulse-train GPR보다 상황에 대한 적응력이 더 뛰어나게 된다. 구조 또한 간단하여 구현이 쉬운 장점이 있으나, 스캔 속도가 매우 느린 결정적인 단점을 갖고 있다.
3. SFMC GPR
Stepped-frequency-Multi-Carrier(SFMC) GPR 기술[1]은 (그림 6)과 같이 동일한 Bandwidth 기준으로 잡을 때, 스캔 속도를 Stepped-frequency GPR 기술보다 획기적으로 고속화할 수 있는 기술이다.
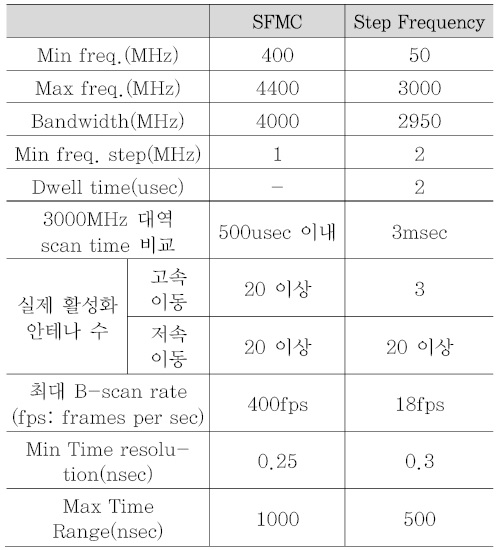
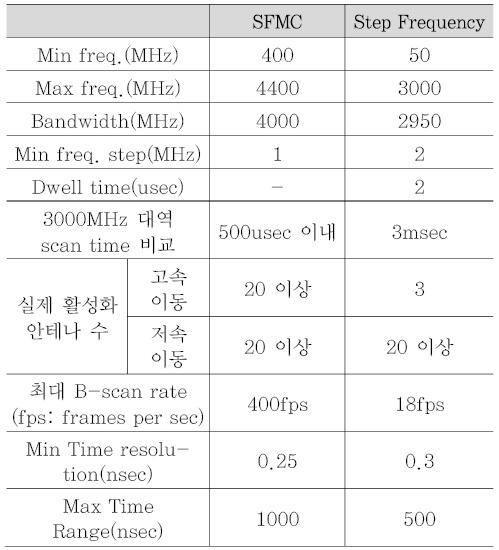
<표 1>은 두 기술 간의 사양 비교를 위한 예시로써, SFMC GPR이 Stepped-frequency GPR보다 더 좁은 Bandwidth를 사용하지만 SFMC GPR이 Stepped-frequency GPR보다 20배 이상 빠른 스캔 속도를 실현할 수 있다.
4. 지중탐지 레이더 신호처리 기술
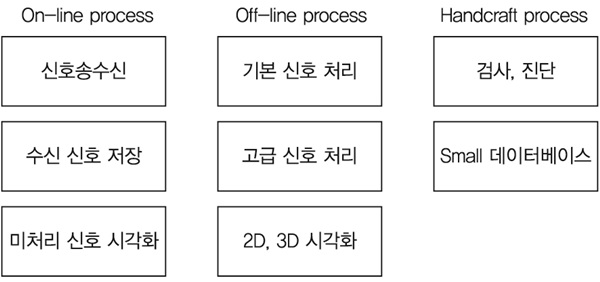
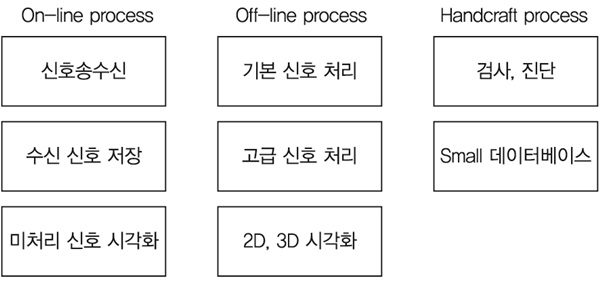
지중탐지 레이더 신호처리 기술은 (그림 7)과 같이 크게 3단계로 구분할 수 있다. On-line 단계는 신호의 송수신, 수신된 스캔 신호 저장, On-line으로 간단히 시각적 확인을 위한 초기 신호처리만 거친 미처리 신호의 A/B 스캔 데이터 시각화 과정으로 구성된다. On-line 시각화 영상 신호만으로는 도로함몰의 원인을 파악하기 어렵다. Off-line 단계는 dewow, clutter removal, lowpass filtering, time-varying gain control 등의 기본 신호처리 과정, migration, time-frequency analy-sis, time-space analysis, velocity analysis, material analysis 등의 고급 신호처리 과정, 2D/3D 시각화 및 영상 Enhancement 과정으로 구성된다. 기본 신호처리 단계의 일부 기능은 On-line화 할 수 있으나 고급 신호처리 과정 없이 On-line으로 도로함몰 분석은 현재로써는 불가능하다. Off-line 단계를 거친 영상 정보는 전 문가에 의해 검사, 진단에 사용된다. 일부 검사, 진단 응용 분야는 자동화되어 있지만 대부분 실무적으로는 전문가의 수작업으로 검사, 진단이 이루어진다. 도로함몰 검사, 진단 분야 역시 아직 매우 기초적인 단계를 벗어나지 못하고 있으며 수작업에 의존할 수밖에 없다.
Ⅲ. 국외 제품 동향
1970년대에 설립된 미국에 본사를 둔 GSSI사는 Pulse-train GPR 제품을 생산하는 업체이며, Band width가 500MHz~2GHz의 비교적 저해상도급 제품을 생산한다. (그림 8)과 같이 긴 역사에 걸맞게 도로 검사용 차량형, 카트 탑재형, 핸드헬드형 등 다양한 형태의 GPR 하드웨어 및 도로, 교량, 농지 등 다양한 응용 분야의 GPR 소프트웨어를 출시하고 있다.

MALA사는 1930년대에 설립된 스웨덴 업체이며, 보유 제품군은 GSSI사와 유사하나, 특징은 (그림 9)와 같이 배열 안테나 기반의 GPR 제품을 보유하고 있으며, GPR 시스템 운용을 위한 다양한 엔지니어링 서비스를 제공하고 있다.

IDS사는 이탈리아에 본사를 두고 세계 6개국에 지사를 둔 군수 회사이다. MALA사와 유사한 제품군을 보유하고 있는 유럽의 양대 GPR 생산 업체이다. 배열 안테나 제품은 (그림 10)과 같이 MALA사보다 높은 수준의 제품군을 보유하고 있다. 자동과 수동 신호처리 소프트웨어를 제공하고 처리 신호를 캐드맵에 자동으로 오버로딩하는 기능 등 비교적 높은 완성도를 갖는 소프트웨어를 제공한다.

그 외 Pulse-train GPR 제조사로는 캐나다의 Sensors & Software, 미국의 Penetrate 등이 있다. Pulse-train GPR 제조사의 공통점은 오랜 기간 축적된 펄스 Ultra-wideband(UWB) 레이더 기술의 노하우를 기반으로 솔루션을 구축하고 있다. 이로 인해 제품의 내부 구조가 지나치게 아날로그 소자에 의존하고 있어 기존의 제품보다 성능이 향상된 신제품을 쉽게 출시하기 어려운 특징이 있다. 실제로 다양한 제품들의 근간을 이루는 임펄스 송신기나 등가 시간 A/D 변환기의 성능은 대동소이하며 3GHz를 넘기는 제품이 존재하지 않는다.
전 세계 Pulse-train GPR 제조사의 수가 10여개 내외지만, Stepped-frequency GPR 제조사는 단 하나에 불과하다. 2001년 스웨덴에서 설립된 3d Radar사는 Bandwidth가 3GHz인 Stepped-frequency 방식의 GPR 제품을 생산하고 있다. 3d Radar사의 제품군은 Pulse-train GPR 제조사보다는 다양하지 못하다. 3d Radar사는 (그림 11)과 같이 배열 안테나 방식의 시스템을 차량에 탑재하여 투과 깊이 1m 내외의 포장도로를 검사하는 장비를 생산하고 있는데, dwell time, frequency step의 설정이 비교적 자유로워 Stepped-frequency GPR의 장점을 활용할 수 있다. 그러나 스캔 속도가 극도로 느려서 시스템의 운용상에서 불편한 점이 많이 발생하는 단점이 있다. 제품의 기능으로 미루어 볼 때, 송수신기의 구조가 매우 단순하게 구성되어 있을 것으로 추정되며, 무선통신에서 활용되는 첨단 기능은 거의 적용되어 있지 않은 것으로 추정된다. 신호처리 동작은 Off-line 단계에 집중된 것으로 보인다. 3d Radar사뿐 아니라 Stepped-frequency GPR의 연구에 관한 문헌에서 ICT기술이 적용된 주목할 만한 연구결과는 거의 눈에 띄지 않는데, 최근 Step-Frequency GPR 신호처리 연구에서는[2] 주파수에 반비례하는 Filter gain을 갖는 Fourier Transform에 대한 연구가 주목할 만하다.

Ⅳ. 맺음말
본고에서는 최근 도로함몰 원인분석을 위해 주목받고 있는 지중탐지 레이더 기술에 대한 특징과 국외 제품 동향에 대해 알아보았다. Pulse-train GPR 기술은 저해상도급 성능을 가지며 기술적 성숙도가 포화 상태에 이르고 있음을 알 수 있었다. 반면 Stepped-frequency GPR 기술은 연구개발이 아직 초기단계에 머물고 있어 제조사의 수도 적고 연구개발의 다양성도 떨어지고 있다. 그러나 시스템 구조가 무선통신 기기와 유사하기 때문에 무선통신 시스템에서 사용되는 다양한 핵심 기술의 활용을 통해 고성능화, 다양화에 대한 연구가 가능할 것으로 판단된다. 향후 이러한 연구개발을 통해 현재 제한적으로 사용될 수밖에 없는 지중탐지 레이더 시스템의 방식 및 하드웨어 성능을 개선하는 연구, 신호처리 소프트웨어 기술의 고도화 연구 등을 통해 정확성, 신속성이 높은 실효성 있는 도로 상태 검사를 가능하게 하며, 건축물 검사 분야 등 다양한 비파괴 검사 분야에 널리 활용될 수 있도록 이 분야의 보다 많은 연구개발이 필요하다.
약어 정리
D.K. Kim, Y.W. Choi, and D.W. Kang, “Step Frequency Multi Carrier Algorithm for High-Speed and High-Accuracy Radio Frequency Nondestructive Road Test,” Inter. Conf. ICT Convergence, Oct. 2013, pp. 875-878.
J. Sala, H. Penne, and E. Eide, “Time-Frequency Dependent Filtering of Step-Frequency Ground Penetrating Radar Data,” Inter. Conf. GPR, June 2012, pp. 430-435.




- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.