
송유승 (Song Y.S.) 자율주행인프라연구실 선임연구원
최정단 (Choi J.D.) 자율주행인프라연구실 실장
손주찬 (Sohn J.C.) 스마트모빌리티연구부 부장
Ⅰ. 서론
스마트카는 기계 중심이었던 자동차 기술과 전자 및 IT기술의 융합을 통하여 정보화, 편의성, 안전도를 극대화시켜 자율주행까지 발전할 수 있는 차세대 자동차이다. 스마트카는 환경 센서 기반의 단독형 시스템에서 V2X 통신 기술과 결합한 협력형 능동안전 시스템으로 발전하여 개발이 본격화되고 있다. 협력형 능동안전 시스템은 고기능의 안전운전지원 센서 위주의 개발과 함께, 도로 인프라, 빅데이터를 기반으로 ICT기술과 연계하여 교통흐름을 예측하고 대응하기 위한 클라우드 기반 자율주행 서비스를 위한 기반 기술로 발전하고 있다[1][2].
자동차와 도로 인프라, V2X 통신 기술의 융합을 통해 안전과 편의를 위한 다양한 정보를 차량 내·외부와 쉽게 소통할 수 있는 클라우드 컨넥티드 자율주행 자동차 실현을 위해서는 차량 내부 네트워크의 진화와 외부 Connectivity(연결성) 지원용 네트워크 기술 발전이 필수적이다. 또한, 발전하고 있는 IoT 환경과 스마트카의 융합을 위해서는 스마트카에서 커넥티비티 역량이 무엇보다도 중요하게 되었으며 이를 위한 요소기술로 차량용 이더넷, V2X 네트워킹, 네트워크 보안기술을 꼽을 수 있다.
본고에서는 스마트카에 적용되는 차량 내부 네트워크 및 게이트웨이, V2X네트워킹 및 네트워크 보안에 관한 최근 표준 기술동향 및 이슈를 살펴보고자 한다.
II. 스마트카 네트워크 기술동향
1. 차내 네트워크 기술
차량 내부 네트워크 기술은 전자제어시스템 간의 데이터 공유를 목적으로 개발되었으며, 점대점(Point-to-Point) 방식으로 연결하는 전통적인 배선 시스템 체계보다 통합 및 운용에 많은 장점을 제공하고 있다. 차량 내부 네트워크에는 Controller Area Network(CAN), Local Interconnect Network(LIN), FlexRay, Media Oriented Systems Transport(MOST), 이더넷 등의 다양한 네트워크 시스템이 존재한다.
가. 차내 버스 시스템
CAN 통신은 차량 내부 전자장치들을 연결하는 직렬 버스 네트워크 통신으로 파워트레인에서부터 바디에 이르기까지 모든 자동차 분야에서 꾸준히 사용되고 있다.
LIN 통신은 저비용의 직렬 버스 통신 프로토콜로 간단하면서도 경제적인 방식으로 안전성을 고려해야 하는 운전 영역이 아닌 편의 영역 내에서 신호 데이터 교환을 위해 사용된다. FlexRay와 MOST 버스는 실시간 요구사항이 많고 더 넓은 대역폭이 필요한 경우에 CAN을 대체해 사용된다. (그림 1)은 차량 내부 네트워크의 시스템 적용분야와 대역폭을 나타내고 있다.
")
최근 차내 전자제어시스템의 사용이 점차 증가하여 고대역폭, 실시간 데이터 전송을 요구하고 있어 기존 차내 버스 시스템을 보완하기 위한 CAN with Flexible Data rate(CAN FD)와 차량용 이더넷 도입이 적극적으로 검토되어 차량에 적용되고 있다.
CAN-FD는 CAN 네트워크의 평균 데이터 전송률을 증가시키기 위해 기존 CAN 프로토콜을 향상시킨 버전이다. CAN-FD의 데이터 전송률은 멀티 드롭 네트워크에서 2Mbit/s까지, 점대점 통신에서 5Mbit/s까지 가능하다. 이와 관련하여 ISO 표준 11898-2/-5/-6에서는 CAN 고속 트랜시버의 개발을 다루고 있다[3].
나. 이더넷 및 IP 적용
고속, 대용량 처리 가능하고 타 기기 연계 및 확장성이 용이한 네트워크 플랫폼으로 차량용 이더넷을 주목하고 완성차 업체를 중심으로 기술개발 및 표준화가 활발히 진행되고 있다. 이더넷은 차량 진단과 프로그램 업데이트를 위해 OBD 커넥터에 적용되기 시작하여, 카메라 기반 능동안전시스템에 적용되고 있으며 이더넷 기술을 차량 내부 네트워크의 백본으로 확장해 가고 있다.
(그림 2)에서는 차량에 적용되는 다양한 애플리케이션에 따른 전송계층과 관련 프로토콜을 보여준다. 붉은색으로 표기된 부분은 차량용으로 새로 개발된 영역이다.
")
차량진단(Diagnostic Access)을 위해서는 IEEE802.3 와 IPv4/IPv6를 기반으로 Diagnostics over IP(DoIP)프로토콜이 이용된다. 스마트그리드에서 차량과 충전소 간의 충전 형태(AC/DC)나 충전 일시, 충전 시간, 요금 및 지급방법 등의 정보를 교환하기 위해 TCP/IPv6과 전용 Smart Charge Communication(SCC) 프로토콜이 이용되며 관련된 표준으로는 ISO 15118 표준이 있다.
표준형 이더넷 차폐 케이블은 배선 비용이 비싸 차량 내 네트워크에 널리 이용하기 어려웠으나, 새로운 BroadR-Reach 물리계층(PHY)을 도입함으로써 이더넷을 차량 내 통신에 이용할 수 있게 되었다. 기존 IEEE Base-T PHYs 기술을 기반으로 비차폐 단일쌍 차량용 케이블과 커넥터를 지원하면서 Electromagnetic Com-patibility(EMC)를 저감한 BroadR-Reach는 100Mbit/s의 대역폭을 제공하는데, 이는 CAN과 비교할 때 100배나 빠른 속도이며 배선 비용도 경제적이다.
차량에 대한 요구사항을 충족시키기 위한 개방형 프로토콜 Service Oriented MiddlewarE over IP(SOME /IP)는 서비스 지향(Service-oriented) 통신을 위한 인터페이스를 제공하며 유연한 통신을 구현하기 위해 사용 가능한 대역폭을 최적으로 사용하는 것을 목표로 한다. SOME/IP 프로토콜은 크게 세 가지 기능을 구분된다. 서비스 디스커버리(Service Discovery: SD), 원격 절차 호출(Remote Procedure Call: RPC), 데이터 처리를 위한 액세스로 나눌 수 있다. SD 영역은 Electronic Control Unit(ECU)이 서비스를 검색하거나 네트워크상에서 다른 서비스를 제공하도록 한다. 사용자는 RPC를 통해 SD가 제공하는 방법을 활용할 수 있다. 또한, 특정 이벤트에 대한 알림(notification)을 설정하는 것도 가능하다. 애플리케이션은 특정 프로세스 데이터에 액세스하기 위해 읽기/쓰기 기능을 사용할 수 있다[4].
다. 차량 게이트웨이
앞서 설명한 바와 같이 이더넷/IP 기술이 차량에 도입되면서 기존 버스 시스템과 공존하는 형태로 차량 네트워크는 발전해 갈 것이다. 현 단계에서 이더넷과 기존 버스 시스템과 결합하기 위한 네트워크 토폴로지에 대한 연구가 필요하다. 이종 네트워크 간의 연동을 위한 게이트웨이나 외부 클라우드나 모바일기기로 데이터 전송을 위한 게이트웨이도 중요한 역할을 하게 된다.
(그림 3)은 진단서비스에서 게이트웨이 기능 및 네트워크 구성 예를 보여준다. 이더넷/IP기반으로 외부 진단 서버 및 진단기기와 네트워킹을 위해 DoIP 게이트웨이는 차량 내부 CAN, LIN, FlexRay 기반 ECU와 연동을 위한 스케줄링 및 프로토콜 변환 기능을 제공한다.
무선통신기술이 차량과 융합되면서 헤드유닛에서 클라우드와 접속하게 되어 차량 게이트웨이는 차량 내부 네트워크 구성원리 및 제어 구조에 최적화된 인터페이스 표준을 기반으로 개발되어야 한다. 또한, 외부기기에서 차량 액세스가 가능하게 되면서 차량게이트웨이에는 인증/암호화 같은 보안 서비스가 필수 기능이 되었다.
")
2. V2X 네트워킹 기술
V2X는 Vehicle to Everything의 약어로 자동차에서 유무선 통신망을 통해 정보를 주고받는 차량전용통신시스템을 말한다. V2X 통신기술은 기존 ITS와 결합한 협력형 ITS와 능동안전시스템과 결합한 통합안전시스템(Cooperative Active Safety System)에서 그 중요성이 더욱 부각되고 있다.
V2X를 기반으로 하는 협력형 ITS는 차량과 인프라, 차량과 차량의 고속 무선통신을 기반으로 다양한 첨단 시스템과 기술을 활용하여 협력 시스템과 역동적인 데이터 교환 시스템 구축을 통해 이용자 중심의 다양한 ICT 융복합 서비스를 제공한다. (그림 4)에서와 같이 협력형 ITS에서 정보교환의 주체는 센터, 노변장치, 차량, 개인용 단말이라고 하는 ITS 스테이션이며 ITS 스테이션 간의 네트워킹을 위해 ISO 21217 기반의 통신 아키텍처를 채택하고 있다. 스테이션 간의 통신 경로설정은 ISO 24102 표준을 따른다.
")
ISO 21217에서 정의한 ITS 스테이션의 참조 구조를 살펴보면 접속(Access) 계층, 네트워킹 및 트랜스포트 계층(Network & Transport), 퍼실리티(Facilities) 계층과 보안(Security)과 관리(Management)를 위한 엔티티 및 최상위에는 애플리케이션(Application)계층으로 구성되어 있다. ITS 스테이션 간의 경로설정을 위해서는 접속계층에서 제공하는 다양한 무선통신(이동통신, 무선랜, DSRC, DMB, WAVE 등) 중에서 상황에 맞는 무선통신 매체를 선택하여 사용할 수 있다. 현재 ISO TC204 WG16에서는 LTE, Device to Device(D2D) 인터페이스 수용을 위한 표준화도 진행 중이다.
V2X 통신기술은 협력형 ITS뿐만 아니라 차량 안전 시스템에도 융합되기 시작하였다. 자동차 주변의 위험상황은 주변 환경 인식기술(레이더, 영상 센서 등)을 이용하고 차량에 장착된 센서로 인식할 수 없는 교차로를 가로지르는 차량, 보이지 않는 선행차량의 급정거, 곡선로의 고장 난 차량 등의 정보를 V2X 통신기술을 통해 획득할 수 있기 때문이다. 이처럼 차량 센서와 V2X 통신 기술이 통합된 차량 안전 시스템 개발이 본격화되고 있으며 ISO TC204 WG14에서 협력형 차량 안전시스템 표준화가 활발히 진행되고 있다.
3. 스마트카 네트워크 보안기술
최근 미국 보안기술 연구원은 고속도로를 달리던 차량을 16km 떨어진 집에서 컴퓨터로 해킹해 급정거하는 모습을 성공적으로 시연하였다. 이처럼 V2X 통신 기술과 서비스가 발전함에 따라 차량 내외부 간 네트워킹이 증가하여 폐쇄망 성격을 가지던 자동차 내부 네트워크가 해킹위협에 노출되고 있다. 또한, V2V 통신과 차량 레이더를 융합한 기술이 차량 안전시스템 및 자율주행 시스템에 적용되어 외부 통신망을 이용하여 차량 내부까지 제어하는 기술이 요구되므로, 해킹 위협이 더욱더 증가할 것으로 예상된다.
현재 차량 네트워크에 가장 많이 사용되는 CAN 통신은 브로드캐스트 통신 프로토콜임에도 불구하고 데이터 암호화나 인증기능이 제공되고 있지 않다. 공격자는 CAN 통신 내용을 도청할 수 있고 통신 구간 메시지를 위변조할 수 있다. 이에 주요 선진 자동차 업계는 차량 내 임베디드 시스템 해킹 문제에 대한 심각성을 인식하고 다양한 대응 방안을 제시하고 있다. 포드사에서는 제동장치와 인터넷 접속을 담당하는 네트워크를 분리하여 사이버 공격을 받더라도 차량 운행에 지장이 없도록 하고 있으며, 도요타에서는 앱을 통한 바이러스 침입을 막기 위해 자사 전용 앱 스토어만 이용하도록 하고 있다.
국내에서도 자동차 내부 네트워크 보안을 위해 국책과제로 CAN 통신 취약점을 증명하고 이러한 위협으로부터 보호할 수 있는 암호화 및 인증 기법을 설계하였고 현재 자동차-ICT 융합 보안 분야에서 자동차 전장 ECU 간 보안전송기술 개발이 진행되고 있다.
V2X 통신 기반 안전서비스에서는 차량과 차량, 차량과 인프라 간 주기적으로 안전메시지를 보낸다. 주변상황, 자동차속도, 자동차 위치 등이 포함되어 있어, 서비스 현실화될 경우 운전자의 위치정보 보호하기 위한 익명성 보장 기술제공이 필수적이다. WAVE 통신 기술의 보안을 위해 IEEE 1609.2에 보안 메시지 규격과 보안 통신을 위한 절차가 정의되어 있다. IEEE 1609.2에서는 WAVE 메시지에 대한 인증 메커니즘과 사용자에 대한 인증 메커니즘을 제공하며, 사용자 보호를 위한 익명 메커니즘도 표준에 포함되어 있다. WAVE 보안에서 해결해야 할 가장 큰 기술적인 이슈는 고속 이동 중인 차량 간에 전송되는 메시지를 보호하기 위해 패킷 손실이 발생하지 않도록 보안 처리 지연시간을 최소화하는 것으로 하드웨어적인 방법으로 해결하고 있다[7].
Ⅲ. 스마트카 네트워크 표준화 동향
1. ISO TC22 표준화 동향
ISO TC22 SC31에서는 자동차 전장 데이터 통신 전반을 담당하고 있으며, ISO TC22 SC32에서는 자동차 전기전자부품 및 시스템을 다루고 있다. SC31의 작업분과는 (그림 5)와 같이 구성되어 있으며, 데이터 버스 및 프로토콜, Vehicle to Grid(V2G)통신, 진단 및 테스트 프로토콜, 데이터 포맷 등이 주요 표준화 대상이 된다.
")
ISO TC22 SC31 WG2 차량진단 분과에서는 IP기반 차량진단 통신(ISO 13400 series) 표준화가 진행 중이다. ISO 13400-1은 일반정보와 유스케이스 정의, ISO 13400-2는 트랜스포트 프로토콜과 네트워크 계층 서비스, ISO 13400-3는 IEEE802.3 표준기반의 유선 차량 인터페이스, 그리고 ISO 13400-4는 이더넷 기반의 고속 통신 데이터 링크 커넥터를 다루고 있다.
최근 ISO TC22 SC32 교토 회의(2015. 6.)에서는 기가비트 이더넷 표준개발이 제안되어 논의되었다. 일본에서 Tokyo 2020 올림픽에 맞춰 ITS 확산정책을 가지고 자율주행시스템(self-driving automation level3) 구현을 위한 기반기술 활용을 목표로 제안하였다. ISO TC22 SC32에서 optical component의 hardware를 다루고, SC31은 이 기술을 활용한 통신 프로토콜 및 시스템(IEEE802.3bv 활용) 표준화 진행에 대해 제안하였다. 제안한 표준구성과 표준개발 추진 일정은 (그림 6)과 같으며 관련하여 국가기술표준원 산하 차량 전자전기 및 통신 전문위원회에서 국내 표준화 대응 방안에 대해 논의 중이다.
")
2. 차량용 이더넷 산업표준화 동향
선진국의 차내 네트워크 표준화 활동은 이더넷 표준제정 및 관련 표준채택을 위한 이해 집단을 만들고 참여 업체들의 적극적인 개입을 통해 표준화가 이루어지고 있으며 대표적인 조직으로는 OPEN Alliance, AVnu Alliance, AUTOSAR가 있다.
OPEN Alliance는 2011년에 차량 환경에 적합한 이더넷 표준을 제정하여 사용을 확산하고자 브로드컴, BMW, 프리스케일 반도체, 하만 인터내셔널, 현대자동차, NXP 반도체 등이 주축으로 설립된 특수 영리 단체이다. 주요 목적은 차량 네트워크에 차량용 이더넷 기술을 채택하여 비차폐 단일쌍 차량용 케이블상의 이더넷 연결 산업 표준제정하고, 개방형의 확장 가능한 이더넷 기반 네트워크에 기존 폐쇄적인 애플리케이션을 병합하는 것이다[5][6].
2015년에는 기존 IEEE Base-T PHYs 기술을 기반으로 비차폐 단일쌍 차량용 케이블과 커넥터를 지원하면서 EMC를 저감한 BroadR-Reach 이더넷 기술을 수용하여 통신 속도 100Mbit/s를 지원 가능한 BroadR-Reach 자동차 이더넷 칩을 공개하였다[5].
AVnu Alliance는 IEEE 802.1 Audio Video Bridging(AVB), IEEE 1722, IEEE 1733, 그리고 다양한 네트워크 링크 계층들과 관련된 표준채택을 촉구해 전문적인 품질의 음성 및 영상 전송 개발에 중점을 두는 산업포럼이다. AVnu Alliance는 네트워크로 연결된 오디오, 비디오 디바이스들의 AVB 상호 연동 가능성을 확인하기 위한 프로세스 및 테스트 절차들을 제공한다. AVnu Alliance는 마케팅 워크 그룹(Marketing Work Group: MWG)과 테크니컬 워크 그룹(Technical Work Group: TWG)으로 분류되고 마케팅 워크 그룹에서는 전문 AV 시스템, 자동차, 가전제품으로 구분되며, 자동차 관련 AVnu 기반 공통 요구사항들은 IEEE AVB 802.1AS, Qat, Qav, IEEE 1722, IEEE 1722.1 표준들을 포함하고 있다[5][6].
최근 AVnu Alliance는 AVB 네트워크에 Time-Sensitive Network 결합을 위해 802.1 표준의 하나의 파트로서 Time-Sensitive Networking(TSN) Task Group을 제정했으며 이를 Ethernet AVB Gen 2로 명명하였고 관련 표준목록으로는 <표 1>과 같이 P802.1 ASbt, P802.1 Qbu, P802.1 Qbv 등이 있으며 표준안 개발 중이다.

AUTOSAR에서도 차량에 이더넷 기술을 도입하기 위해 R4.x 버전부터 이더넷 통신 클러스터를 포함시켰다. 이를 지원하기 위한 이더넷 드라이버, 이더넷 트랜시버 드라이버, 이더넷 인터페이스, 이더넷 상태 매니저, UDP 네트워크 매니저, 소켓 어댑터 등 모듈이 추가되었다. AUTOSAR 4.1.1에서는 이더넷 스택이 다음과 같은 기능이 개선됐다[4].
- AUTOSAR 모듈로 구성된 TCP/IP 스택
- IPv4 및 IPv6 지원. 두 가지 IP 버전을 단일 ECU 내에서 개별/병렬로 운영 가능
- 가상 랜(VLAN) 사용 가능
- 소켓 어댑터 상의 PDU 기반 데이터 전송 효율성 증대
- 상위 레벨의 모듈에 대한 소켓 어댑터의 일반 인터페이스 제공
- DoIP 프로토콜을 소켓 어댑터에서 삭제하고 별도의 DoIP 모듈로 분리
- SD 프로토콜을 AUTOSAR 신규 모듈로 사양화
3. ISO TC204 표준화 동향
ISO TC204는 지능형교통시스템에 대한 표준화를 추진하고 있으며, 차량네트워크 기술과 관련 표준을 개발하고 있는 작업그룹으로는 WG14(차량제어 및 경고시스템), WG16(광역통신), WG17(ITS서비스를 위한 노매딕 & 모바일기기)이 있으며, 최근에는 스테이션 간의 안전하고 지속 가능한 상호통신 및 정보교환을 위한 요구사항 충족을 위해 작업그룹 간 Joint 미팅이 이루어지고 있다. (그림 7)에서는 차량 내부 네트워크, 차량 ITS 스테이션 게이트웨이, ITS 스테이션 간의 관계와 각 작업그룹의 표준개발 범위를 나타내고 있다.
")
가. ISO TC204 WG14(차량제어 및 경고시스템)
WG14에서는 스마트 안전 시스템에 대한 시스템 표준을 다루고 있다. 레이더, 비전 등의 센서를 기반을 둔 단독형 능동안전시스템뿐만 아니라 V2X 무선통신과 결합한 통합안전시스템(Cooperative Safety System)도 표준화가 진행 중이다. 이에 시스템 간의 데이터 교환을 위해 WG16과 협조체계 마련이 필요한 시점이다.
현재 Preliminary Work Item(PWI) 20035로 채택된 Cooperative Adaptive Cruise Control(CACC)시스템은 V2V통신을 기반으로 하며 자율주행의 초기단계 표준으로 표준화 진행 중이다. 통합안전시스템과 관련하여 논의 중인 주요 표준화 아이템은 다음과 같다.
- Definitions of terminology and classification to facilitate professional communication
- Definitions of functionality(user expectations)
- Performance requirements(especially related to safety)
- Testing procedures
- Interoperability(V2V and V2I/I2V messaging)
나. ISO TC204 WG16(광역통신)
V2V, V2I 중장거리 통신 시스템에 대한 표준화 작업을 추진하고 있는 ISO TC204 WG16에서는 차량 내에서 장소에 구애받지 않고 ITS 스테이션 간에 원활한 연결성을 제공하기 위하여 Communication Access for Land Mobile(CALM)이라는 통신 시스템에 대한 표준화 작업을 추진하고 있다.
광역통신방식을 이용한 통신시스템에서 ITS 서비스 제공에 필요한 프로토콜과 인터페이스를 규정하는 WG16에서는 최근에는 D2D 혹은 M2M, IoT 서비스에 대응하기 위한 LTE 인터페이스, IPv6 over Low-Power wireless Area Networks(6LoWPAN), Constrained Application Protocol(CoAP) 프로토콜을 ITS 스테이션에 적용하는 표준화가 진행 중이다.
ISO 17515 표준은 ITS 스테이션에 LTE 인터페이스 적용을 위한 표준으로 ITS 스테이션 아키텍처에서 통신적응계층과 관리적응 엔티티에 대한 내용을 구제화하여 통신에 적용할 수 있도록 한다. 관련 통신 미디어 타입은 ISO 21218에 미디어타입 10으로 규정되어 있다. ITS 스테이션에서 802.15.4 통신미디어를 이용하여 M2M 혹은 IoT 응용서비스를 고려한 6LoWPAN & CoAP 프로토콜 적용을 위한 구조 및 기능모듈은 (그림 8)과 같이 논의 중이며, 관련 표준은 다음과 같다.
")
-
ISO/C D 19079 Intelligent Transport Systems – Communications access for land mobiles – 6LoWPAN networking
-
ISO/CD 19080 Intelligent Transport Systems – Communications access for land mobiles – CoAP facility
다. ISO TC204 WG17(모바일&노매딕기기)
ISO TC204 WG17은 모바일 기기를 이용하여 ITS 서비스 제공을 위한 표준화를 추진하고 있다. 현재 개발 중인 표준으로는 ITS 응용서비스에서 차량데이터 접근을 위한 차량 인터페이스 표준 ISO 13185 Unified Gateway Protocol(UGP)와 차량안전주행을 위한 인프라협력 서비스를 위한 ISO 13184 Road Guidance Protocol(RGP) 표준이 있다. ISO 13185는 (그림 9)와 같이 차량 내부의 차량게이트웨이와 접속하여 동작한다.
차량 스테이션 게이트웨이(Vehicle Station Gateway: VSG)는 ITS 스테이션과 연결되고 외부 기기에 대한 보안 기능을 제공한다. 차량 게이트웨이에 VSG 소프트웨어와 UGP 서버 프로토콜이 탑재되어 외부기기에 UGP 클라이언트 프로토콜이 탑재되는 형태로 표준화 진행 중이다.
")
Ⅳ. 결론
스마트카는 고기능의 안전운전지원 센서 위주의 개발과 함께, 도로 인프라, 빅데이터를 기반으로 ICT기술과 연계하여 협력형 자율주행 자동차로 발전함에 따라 급속한 기술 변화가 일어나고 있다. 이와 관련하여 본고에서는 스마트카에 적용되는 차량 네트워크 기술 및 국제표준화/산업표준화 동향에 대해 살펴보았다.
스마트카 네트워크는 차량 내부 전자제어시스템에서 차량 대 차량, 차량 대 인프라, 클라우드 서버까지 확장되고 있으며 협력형 자율주행자동차 실현을 위한 필수 기술로 부각되고 있다. 그러나 현재 자동차 네트워크 기술은 필요에 따라 다양한 통신 방식이 개발 시스템별로 채택되어 설계되고 개발됨에 따라 중복되고 과잉 설계되어 있다. 이를 극복하기 위해서는 차량 내부 네트워크에서 클라우드 서버 및 IoT 연결까지 전체 시스템을 고려한 체계적인 설계와 표준 통신 플랫폼이 필요하다. 국제표준기반 통신 플랫폼에 입각한 네트워크 전장 부품 개발을 통해 우리나라에서도 세계시장을 주도하는 차량부품업체 및 차량 ICT업체가 생겨나고 선진 자동차 융합 산업 생태계가 생겨나기를 기대해 본다.
약어 정리
6LoWPAN
IPv6 over Low-Power wireless Area Networks
AVB
Audio Video Bridge
CACC
Cooperative Adaptive Cruise Control
CALM
Communication Access for Land Mobile
CAN
Controller Area Network
CAN FD
CAN with Flexible Data rate
CoAP
Constrained Application Protocol
D2D
Device to Device
DoIP
Diagnostics over IP
ECU
Electronic Control Unit
EMC
Electromagnetic Compatibility
LIN
Local Interconnect Network
MOST
Media Oriented Systems Transport
MWG
Marketing Work Group
PWI
Preliminary Work Item
RGP
Road Guidance Protocol
RPC
Remote Procedure Call
SCC
Smart Charge Communication
SD
Service Discovery
SOME/IP
Service Oriented Middleware over IP
TSN
Time-Sensitive Networking
TWG
Technical Work Group
UGP
Unified Gateway Protocol
V2G
Vehicle to Grid
V2X
Vehicle to Everything
VSG
Vehicle Station Gateway
References
(그림 1)
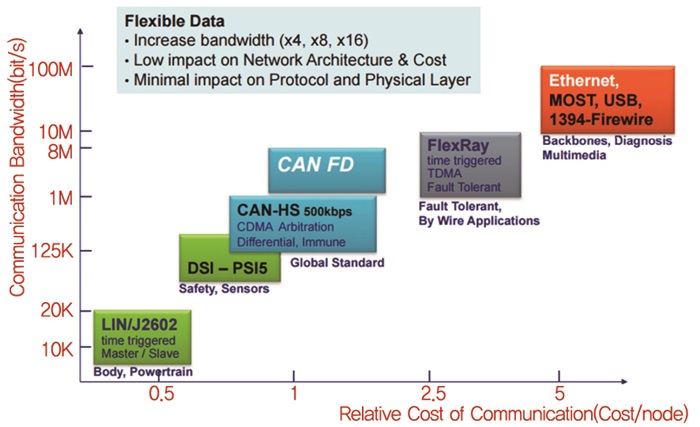
차량 내부 네트워크 적용분야 및 대역폭
(그림 2)
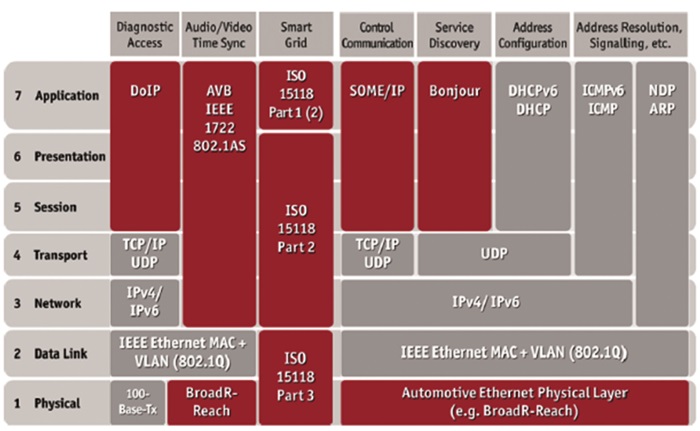
차량용 이더넷 & IP 프로토콜[4]
(그림 3)
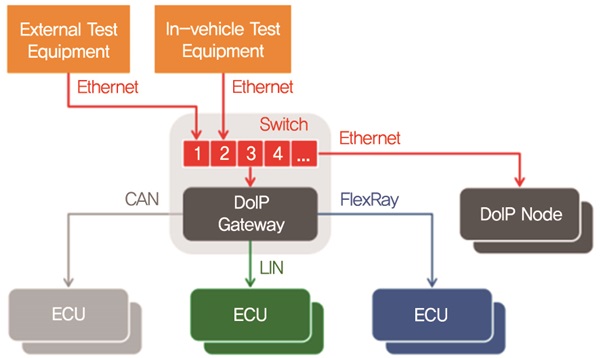
Ethernet in AUTOSAR 4.0
(그림 4)
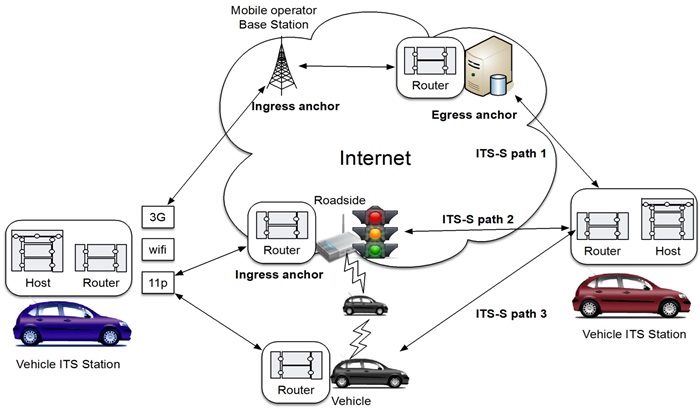
ITS Communication Paths<a href="#r008">[8]</a>
(그림 5)
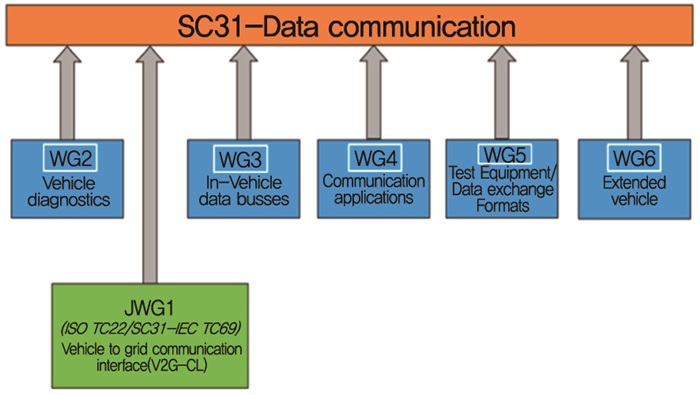
ISO TC22 SC31 작업분과
(그림 6)
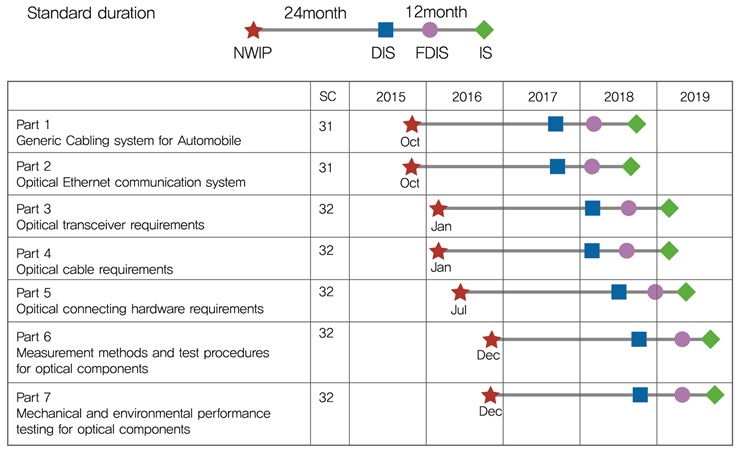
기가비트 이더넷 표준구성 및 추진계획(안)
<표 1>
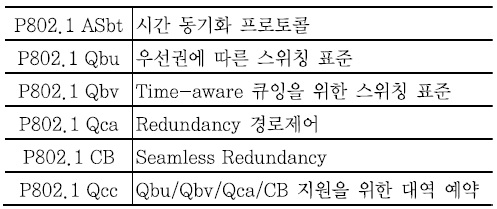
Ethernet AVB Gen2 표준목록
(그림 7)
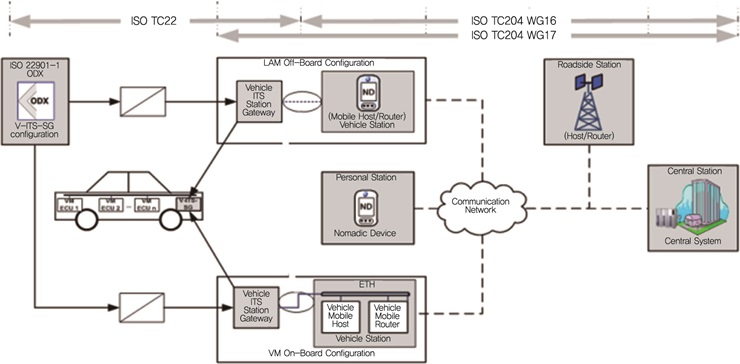
Road Vehicle to ITS Technology Chain
(그림 8)
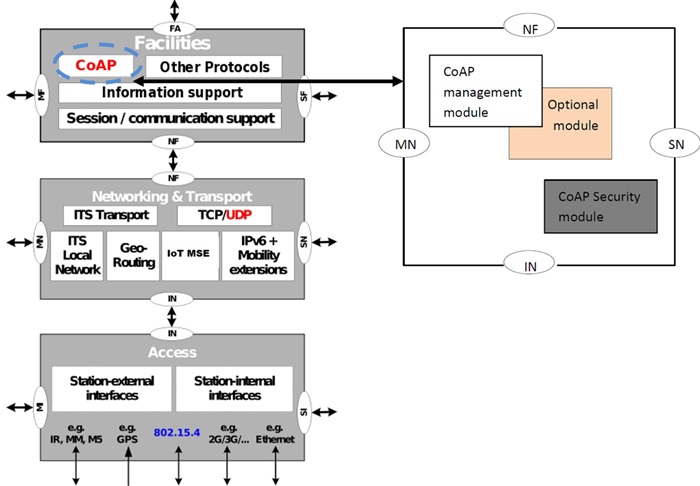
ITS 스테이션에서 CoAP Function Module
(그림 9)
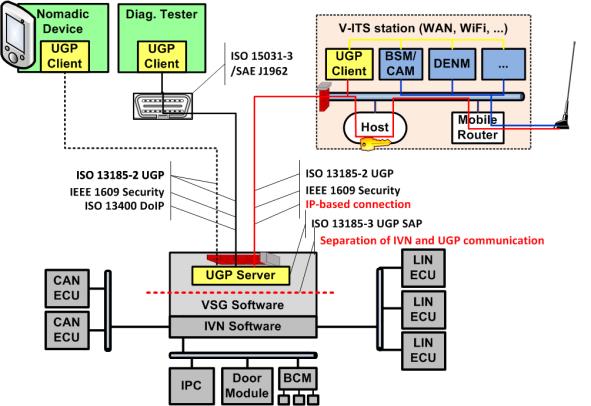
ITS 스테이션에서 UGP