국내 달 탐사를 위한 우주인터넷 기술개발
Development of Space Internet Technology for Korea Lunar Exploration
- 저자
- 조진호, 지신애, 이병선, 안재영 / 무인이동체시스템연구그룹
- 권호
- 32권 3호 (통권 165)
- 논문구분
- 일반 논문
- 페이지
- 116-127
- 발행일자
- 2017.06.15
- DOI
- 10.22648/ETRI.2017.J.320313
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- 우리나라는 2단계에 걸친 달 탐사 계획을 세우고 있다. ETRI는 국내 달 탐사 프로그램에 참여하여 우주인터넷 통신기술 및 탐사선 간 통신을 위한 Proximity-1 통신장치를 개발할 계획이다. 본고에서는 우주인터넷의 기술개요와 기술동향을 알아보고 국내 개발계획에 대하여 살펴본다. 아울러 Proximity-1의 기술개요, 규격 및 국내개발 방향에 대하여 함께 살펴보고자 한다.
Share
Ⅰ. 서론
2013년에 우리나라의 달 탐사 사업이 정부의 국정과제로 포함되었으며, 2014년에는 한국형 달 탐사선 개발 사업이 기획재정부의 예비타당성 조사를 통과하고, 2016년에 한국형 달 탐사선 개발사업이 공식 착수되었다. 국내 달 탐사 사업은 국내 기술의 성숙도와 국내외 개발 인프라 및 공동 협력 현황을 고려하여 아래와 같이 두 단계로 나누어 추진될 예정이다[1].
1. 1단계 달탐사
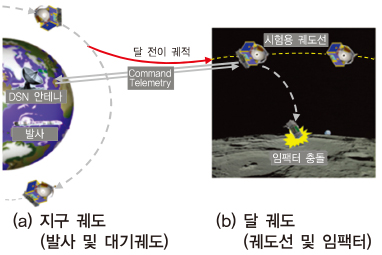
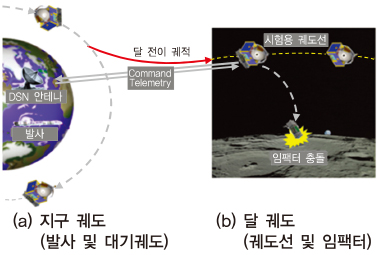
1단계는 2016년에서 2018년까지 진행되며, 해외 발사체를 활용한 달 탐사 시험용 궤도선 발사 및 향후 자력 개발 및 발사를 위한 핵심원천기술 개발을 목표로 한다. 이를 위하여 시험용 궤도선(550kg급)을 국제 협력을 통해 개발한 후, 해외 발사체를 활용해 발사하여 본 궤도선/착륙선에 대한 사전 성능검증모델을 확보할 예정이다[2]. 1단계에서 발사할 시험용 궤도선의 구성도는 (그림 1)과 같다. 시험용 궤도선은 해외 발사체를 이용해서 지구 저궤도에 올린 후 고체로켓 모터를 이용하여 달 임무궤도에 진입된다. 시험용 궤도선에는 다양한 탑재체가 장착되어 여러 가지 달 탐사 임무를 수행하게 된다. 먼저 고해상도 카메라가 장착되어 달 표면을 찍을 예정이며, 획득한 영상자료는 2단계 탐사에서 착륙지점 선정을 위해 활용된다. 그 외에 광각 편광카메라, 자력센서, 감마선 분광기와 우주인터넷 탑재체가 장착될 예정이다. 국내 개발한 탑재체 뿐만 아니라 NASA에서 제작한 과학 탑재체도 2개 정도 장착될 예정이다. 한편, 지구에 설치된 심우주 통신용(DSN) 안테나는 시험용 궤도선과 통신을 수행하여 시험용 궤도선이 획득한 데이터를 수신하게 된다.
2. 2단계 달탐사
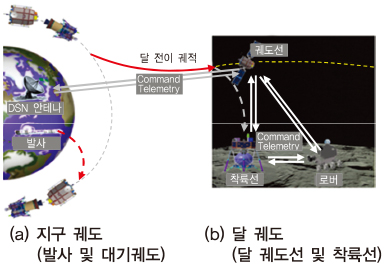
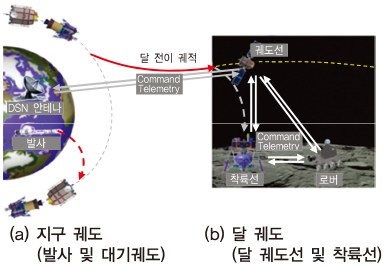
2단계는 2019년~2023년까지 진행되며, 1단계에서 습득된 달 탐사선 주요 기술 및 개발 인프라를 바탕으로 본격적으로 달 탐사 궤도선과 착륙선을 개발, 한국형 발사체(KSLV-II)를 활용하여 발사하는 것을 주요 연구 목표로 한다[2]. 2단계 달 탐사를 위한 궤도선과 착륙선의 구성도는 (그림 2)와 같다. 궤도선과 착륙선은 KSLV-Ⅱ를 이용하여 지구 저궤도에 올린 후 고체로켓 모터를 통해 달 임무궤도에 진입한다. 궤도선은 달 임무궤도에서 주어진 과학임무를 수행하고, 착륙선 및 로버의 상태 데이터와 과학임무 데이터에 대한 수신 및 명령 전송을 수행한다. 착륙선은 주어진 달에 착륙한 이후 탑재된 로버를 지상에 안전하게 내보내고, 로버는 달 표면의 탐사 임무를 수행한다. 지구의 지상국에서는 DSN 안테나를 이용하여 로버 및 궤도선에 명령을 보내고 획득한 상태 데이터 및 과학임무 데이터를 수신한다.
Ⅱ. 우주인터넷 기술 동향
1. 우주인터넷 개요
인터넷은 다양한 통신방식을 서로 통신 가능하도록 연결하여 지구 전체를 하나의 거대한 네트워크로 통합하였다. 이러한 인터넷을 가능하게 한 핵심기술은 바로 TCP/IP라는 프로토콜 때문이다. TCP/IP 프로토콜은 기존의 통신 프로토콜 위에 위치하면서 하위의 서로 다른 통신 프로토콜을 연결하고, 데이터를 최적으로 스위칭하여 원하는 목적지까지 안전하게 데이터를 전송하게 한다. 우주통신에도 인터넷 통신기술을 적용하고자 하는 노력이 2000년대에 이르러 시도되고 있다. 하지만 우주통신 환경은 지상통신 환경과는 달리 몇 가지 다른 부분이 있으며, 이로 인하여 지상에서 사용하던 TCP/IP 프로토콜을 그대로 사용하기에는 어려움이 있다. 우주통신 환경이 지상통신 환경과 다른 점은 아래와 같다.
• 간헐적인 통신링크 단절: 우주선의 이동, 혹은 전파특성이나 전원(battery)에 의해 통신링크가 단절되는 경우가 종종 발생.
• 전송지연: 지상 인터넷과는 달리 상당히 큰 전송지연이 발생되며, 이는 TCP와 같은 프로토콜 적용을 불가능하게 만듦.
• 높은 전송에러: 우주환경으로 인하여 일부 통신구간의 경우 높은 에러가 발생되며, 이러한 환경을 극복하기 위해 높은 수준의 오류정정 기술이 요구됨.
심우주 통신의 경우, 지구와 달까지의 전파지연은 약 1.5초, 화성까지는 약 8분 이상 소요된다. 따라서 우주에서 인터넷 통신을 실현하기 위해서는 새로운 프로토콜의 필요성이 대두되었으며, 이에 대한 대안으로 부상한 것이 Bundle protocol(BP) 이다[3]. BP는 Store and forward 방식으로 데이터를 전송하여 우주통신 환경의 문제점을 극복한다. BP를 이용하여 구축된 네트워크는 전파지연과 단절에 내성을 가지는데 이를 Delay/ Disruption Tolerant Network(DTN)이라고 한다. (그림 3)은 BP를 이용한 Store and forward 방식의 데이터 전송방식을 보여준다.
(그림 3)
BP를 이용한 Store & forward 방식의 데이터 전송 방법

[출처] Delay- and Disruption-Tolerant Networks(DTNs) A Tutorial, Ver 2.0, 2012. 7.
기존의 인터넷 통신은 A/B/C/D 통신 노드가 항상 연결되어 있으므로 A에서 D로 일시에 데이터 전송이 가능하다. 그러나 우주통신에서는 일부 구간에 단절이 발생될 수 있으므로 A/B 노드 간의 통신링크가 연결된 상태이면 A→B로 데이터를 전달하고 일단 B 노드에 저장한다. B/C 노드 간의 링크가 연결되면 B→C로 데이터를 전달하고 C 노드에서 저장한다. C/D 노드 간의 링크가 연결되면 C→D로 데이터를 전달하여 최종 목적지까지 데이터가 전달되도록 한다. 이처럼 BP는 Store and forward 방식의 전송을 이용하기 때문에 일부 구간에 단절이 생겨도 데이터는 중간 Node에서 저장되었다가 통신링크가 회복되면 다시 전달되어 우주환경에서도 통신을 가능하게 한다. DTN 통신기술을 우주통신 분야에 적용하면 다음과 같은 이점이 있다.
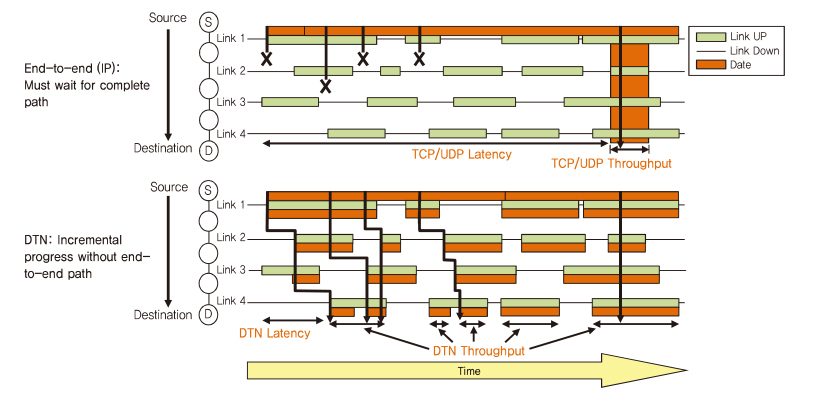
• 통신운영이 자동화되고 통신 가능한 시간이 증대됨. (그림 4)는 DTN 통신이 기존의 통신방식과 대비하여 전송효율이 높다는 것을 보임[4].
• 인터넷이 전 세계의 통신자원을 서로 연결했듯이 우주인터넷은 우주에 존재하는 통신자원을 하나의 네트워크로 연결하므로 우주통신자원의 활용이 극대화됨.
• DTN에서 사용하는 BP를 지상네트워크에서 운영할 경우, 기존의 인터넷 프로토콜인 TCP/IP 위에서 작동하는 overlay 프로토콜로 작동. 따라서 우주인터넷은 쉽게 지상인터넷과 연동되어 하나의 거대한 인터넷으로 연결 가능.
2. 우주인터넷 표준화 동향
우주통신 국제 표준화 기구인 Consultative Committee for Space Data Systems(CCSDS)에서는 DTN 프로토콜의 표준화를 진행하고 있다. CCSDS에서는 Bundle protocol의 표준화뿐만 아니라 Bundle protocol의 아래 계층에 위치하여 TCP를 대체할 수 있는 우주환경에 적합한 Convergence layer protocol인 Licklider transmission protocol(LTP)[5]에 대한 표준화 및 DTN 프로토콜과 하위 프로토콜과의 정합을 위한 Adapter에 대한 표준화도 함께 진행하고 있다. CCSDS에서 진행하고 있는 DTN 프로토콜 표준화 현황은 아래와 같다.
• Bundle protocol
- RFC 5050: BP specification
- RFC 6257: Security protocol specification
- Extension blocks: RFC 6258 metadata, RFC 6259 previous-hop
- RFC 6260: Compressed bundle header encoding
- RFC 6693: Probabilistic routing protocol
• Convergence-layer protocol
- Licklider Transmission Protocol: RFC 5326 (specifi-cation), RFC 5327(Security extensions)
- RFC 7122: UDP adapter
- RFC 7242: TCP adapter
3. 외국의 우주인터넷 기술개발 동향
가. 미국 NASA
NASA는 EPOXI 우주탐사선을 이용하여 2008년에 처음으로 DTN 전송시험에 성공하였다. NASA-JPL에서 개발한 DTN 소프트웨어인 ION을 이용하여 총 14.5M byte에 해당되는 292개의 이미지 파일을 지상국에서 EPOXI 우주탐사선으로 전송하고, EPOXI 우주탐사선에서는 이 신호를 지상국으로 중계하는 방식으로 시험하여 DTN이 심우주통신에 적합한 프로토콜임을 확인하였다[6].
2010년 NASA는 EO-1 탐사선을 이용하여 DTN 통신기능을 시험하였다. 특히, EO-1 위성을 이용한 시험은 특별한 의미를 가지는데, 이유는 2006년 탐사선의 문제로 인해 실시간 Telemetry 수신이 불가능한 상황에서 BP의 Store and forward 기능을 이용하여 Telemetry 수신 기능을 복구할 수 있는지 여부가 큰 관심이었기 때문이다. 시험결과 DTN 프로토콜을 이용하여 성공적으로 Telemetry를 수신할 수 있었다. 특히 통신링크 성능이 열화되어 80% 정도의 Packet loss가 발생되는 상황에서도 LTP의 기능을 이용해서 시간이 지남에 따라 파일이 정상적으로 수신 완료되는 것을 확인하였는데, 이는 기존의 프로토콜의 경우에는 불가능한 것이었다[6].
나. 유럽 ESA
European Space Agency(ESA)는 2012년 국제우주정거장(ISS)에 있는 우주인이 DTN 프로토콜을 이용하여 독일에 위치한 European Space Operation Centre 안의 작은 LEGO 로봇을 움직이는데 성공한 이후, 2014년에는 마찬가지로 ISS에 있는 우주인이 DTN 프로토콜을 이용하여 지상에 있는 ESA의 Eurobot을 조종하는데 성공하였다. 국제우주정거장이 지구상으로부터 400km 상공에 떠있으며, 시속 약 28,000km/h로 이동하는 것을 생각한다면 이러한 원격시험의 성공은 매우 놀라운 성과가 아닐 수 없다[6].
4. 국내 연구개발 현황
ETRI는 1단계 탐사에서 우주인터넷(DTN) 통신기술을 개발하고, 달 탐사선과의 통신시험을 통하여 기술검증을 실시한 후 2단계 탐사에서 임무통신에 활용할 예정이다. 단계별 연구개발 계획은 다음과 같다.
가. 1단계 네트워크 구성
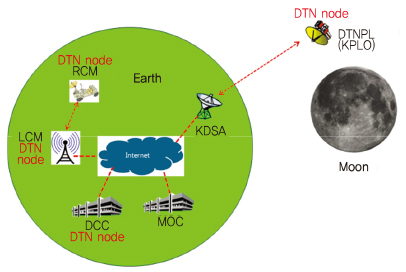
1단계에서는 시험용 달 궤도선(KPLO)만 발사하여 달 궤도를 선회할 뿐 달 표면에 착륙하여 활동하는 착륙선(Lander)이나 로버(Rover)가 발사되지 않는다. 따라서 1단계에서는 DTN 시험을 위하여 지상에 Lander와 Rover의 통신기능을 수행하는 통신모델 장치를 설치하고 KPLO까지 Space link를 이용한 DTN시험을 실시할 예정이다. 1단계에서 KPLO를 이용한 DTN 네트워크 구성은 (그림 5)와 같다[7].
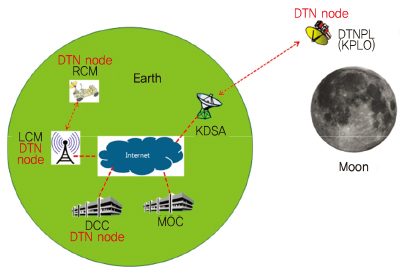
(그림 5)에서 DCC는 DTN Control Center의 약자로 DTN 통신시험을 주관하는 DTN 지상국이다. MOC는 Mission Operation Center의 약자로 KPLO를 감시, 제어하는 관제소이다. DCC에서 지상에 있는 Rover에게 명령을 보내는 경우, DCC에서 보낸 DTN 데이터는 MOC를 거치고 Korea Deep Space Antenna(KDSA)를 통하여 KPLO에 도착한다. KPLO는 수신한 데이터를 Rover에게 전달하는데, Rover 통신기능을 수행하는 Rover Communication Model(RCM)이 지상에 있으므로 KDSA을 통해 지상에 위치한 Lander Commu-nication Model(LCM)에게 DTN 데이터를 보내고 LCM에서는 이 데이터를 RCM에게 전달한다.
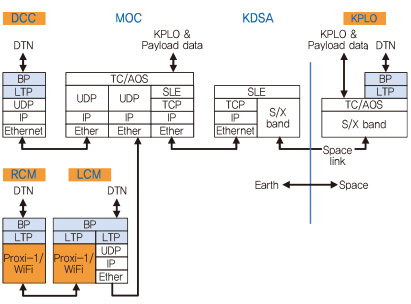
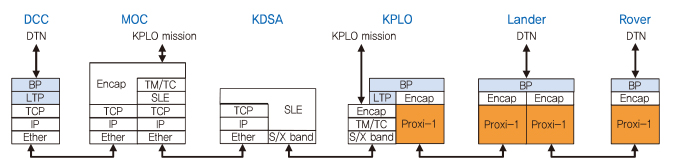
한편 RCM에서 생성되는 운용 데이터, 예를 들면 Rover의 상태 정보와 같은 Telemetry 및 File 데이터는 LCM을 거쳐서 KDSA를 통하여 KPLO로 전송되고, KPLO에서는 이를 다시 지상으로 송신하는데 KDSA를 거쳐 MOC를 통하여 DCC에 도착한다. (그림 6)은 DTN 네트워크의 프로토콜 구조를 보여준다.
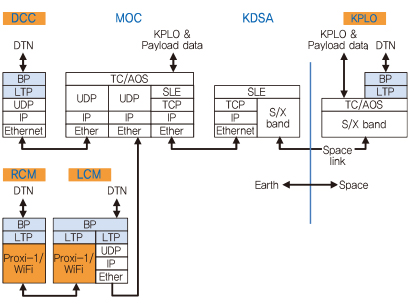
(그림 6)을 보면 LCM과 RCM간의 통신링크는 Proximity-1이라는 프로토콜을 이용하여 연결될 예정이다. Proximity-1 프로토콜은 CCSDS에서 제정한 통신표준기술로서 우주탐사선 간의 통신에 적용되는 프로토콜이며, 미국 NASA는 화성탐사에서 탐사선 간의 통신에 적용한 경험이 있다. Proximity-1에 대한 내용은 후반부에서 자세히 기술하였다.
나. 2단계 네트워크 구성
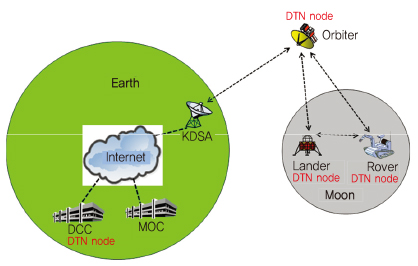
2단계 탐사는 국내에서 개발한 발사체(KSLV)를 이용하여 달 궤도선과 착륙선을 각각 발사한다. 1단계에서 DTN 기술에 대한 성능과 안정성이 충분히 검증되면 2단계에서는 임무통신에 DTN 기술을 이용할 예정이다. 2단계의 통신 네트워크 구성은 (그림 7)과 같다.
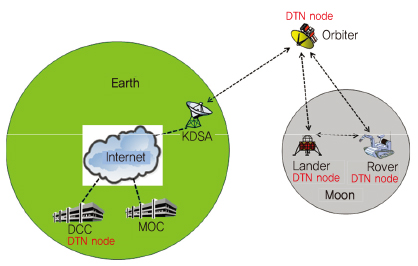
2단계에서는 Lander와 Rover가 달 표면에 위치한다. 따라서 DCC에서 보낸 데이터가 Orbiter를 통하여 Lander, Rover에 전달되고 Lander, Rover의 데이터는 Orbiter를 통하여 DCC에 전달된다. (그림 8)은 2단계 DTN 네트워크의 프로토콜 구조를 보여준다.

다. DTN 기술개발 현황
미국의 NASA-JPL에서는 우주통신에 적합한 DTN 프로토콜 소프트웨어를 제작하여 공개하고 있는데 이를 Interplane-tary Overlay Network(ION)이라고 한다. 세계 각국에서 진행중인 대부분의 우주통신용 DTN 프로토콜은 ION을 기반으로 하고 있으며, ETRI에서 개발하는 DTN 프로토콜 또한 ION을 기반으로 하고 있다. ION은 DTN의 핵심 프로토콜인 BP와 LTP를 지원하며, 상위 Application 프로토콜인 CCSDS File Delivery Protocol(CFDP), Asynchronous Message Service(AMS) 및 Bindle Streaming Service(BSS)를 지원한다. (그림 9)는 ION이 포함된 DTN 프로토콜 구조를 보여준다.

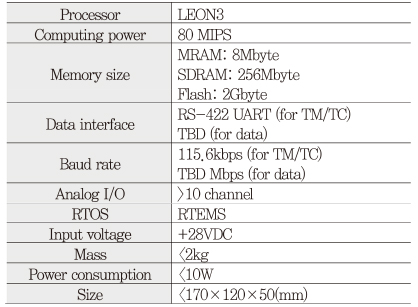
국내 달 탐사에 ION을 적용하려면 BP bundle size 및 LTP segment size에 대한 최적화가 필요하다. 또한, LTP와 하부 계층과의 접속을 위하여 AOS(혹은 TM/ TC) encapsulation layer 및 Proximity-1 encapsulation layer를 추가로 구현해야 한다. 1단계에서 ETRI는 KPLO에 탑재하여 DTN라우터 기능을 수행할 DTN탑재체를 설계하고 있으며, 소형경량화를 목표로 진행 중이다. Engineering model(EM)급 DTN탑재체의 설계규격 및 형상은 <표 1>, (그림 10)과 같다[8].

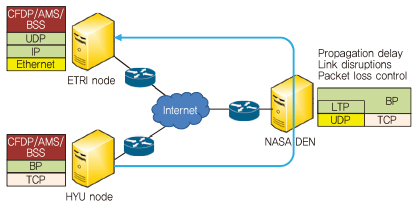
한편, ION의 기능 및 성능 검증을 위하여 ETRI와 NASA간에 DTN testbed를 구축하였고, 국내 협력기관으로 한양대학교(HYU)가 참여하여 ION 프로토콜에 대한 검증시험을 진행하고 있다. (그림 11)은 ETRI/HYU- NASA간에 구축한 DTN testbed 연결 구성을 보여준다.
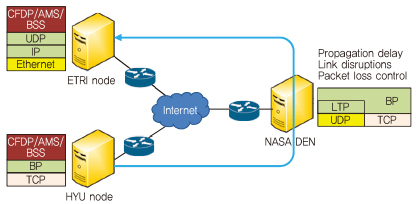
ETRI와 HYU 노드는 Source, Destination 노드이며, NASA노드는 Relay 노드로 운영된다. DTN testbed를 통하여 CFDP, AMS, BSS와 같은 어플리케이션이 BP/LTP 위에서 어떠한 기능 및 성능을 보여주는지 시험을 통한 검증을 진행하고 있다.
Ⅲ. Proximity-1 기술 동향
Proximity-1은 CCSDS 에서 제정한 근거리 우주선 간 통신을 위해 개발된 무선통신 프로토콜이다. Proximity-1의 통신거리는 1m에서 100,000km에 이르며, 이러한 거리 특성으로 인해 수 m의 착륙선과 로버 사이의 통신뿐만 아니라 수백에서 수천 km의 착륙선(또는 로버)과 Relay orbiter 사이, 착륙선(또는 로버)과 우주선 사이의 통신에도 사용될 수 있다. Proximity-1은 2004년 2월 NASA와 ESA의 화성 탐사 미션에서 NASA의 탐사 로버 Spirit(Mars exploration rover)와 ESA의 MEX orbiter(European space agency mars express orbiter) 간 통신에 처음 사용되었으며, 이는 지구 이외의 행성에서 행성 표면으로부터의 직접 통신이 아닌 로버-Orbiter-지상국 사이의 국제적인 통신 네트워크를 통해 데이터를 송수신한 첫 사례로 기록된다[9]. 이러한 Orbiter를 통한 Relay 통신은 로버 또는 착륙선의 한정된 전력과 하드웨어 리소스로 인해 약해진 신호를 Orbiter를 통해 재전송함으로써 더 좋은 품질과 고속의 데이터 전송을 가능하게 한다. Proximity-1은 이후에도 NASA의 화성 탐사 로버 Opportunity (2004년)와 Mars Reconnaissance Orbit-er(2005년), 화성 탐사 착륙선 Phoenix(2007년)에서 사용되었으며, ESA 및 여러 나라의 화성 및 달 탐사 임무에도 도입되고 있다[10].
1. Proximity-1 개발 동향
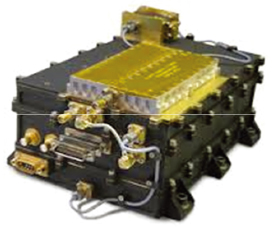
Proximity-1은 2002년 CCSDS에 의해 처음 표준화된 이후 4차례의 수정을 거쳐 2013년에 가장 최근의 버전이 발표되었다. Proximtiy-1을 개발하고 있는 각 기관은 interoperability를 위해 CCSDS 표준을 유지하면서 동시에 기관별 개발 시나리오에 맞춰 여러 기능을 추가하거나 간편화하여 개발하고 있다. L3COMM에 의해 처음 개발되었던 UHF Proximity-1 Transceiver [(그림 12), (그림 13) 참조]는 온도 및 우주 방사선 등으로 인한 혹독한 우주 환경을 견디기 위해 Warm-box라 불리는 외장 박스 내에서 동작하도록 개발되었으며, NASA의 화성 탐사 로버 Spirit과 Relay orbiter에 사용되었다[11].
(그림 12)
로버용 Proximity-1 Micro-Transceiver

[출처] http://www2.l-3com.com/ce/products/space_ space-craft_communications_uhf_transceivers.htm
(그림 13)
궤도선용 Proximity-1 Micro-Transceiver
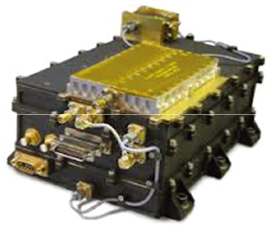
[출처] http://www2.l-3com.com/ce/products/space_ space-craft_communications_uhf_transceivers.htm
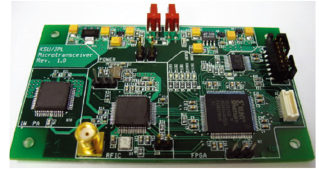
이후 가혹한 우주 환경을 극복할 수 있는 기술 개발이 이루어지면서 소형화와 저전력화가 가능하게 되었으며 Warm-box 없이 동작하는 UHF micro-transceiver가 Kansas State University와 JPL, Pergrine Semi-conductor의 합작으로 제작되어[(그림 14) 참조] NASA의 Mars SCOUT 프로젝트에 사용되었다[11].
2. CCSDS Proximity-1 규격
Proximity-1 프로토콜은 다음과 같은 고려 사항을 바탕으로 설계 되었다.
연결 시간이 예측 가능함. 단말 수가 적으며 Forward 링크에서는 One-to-many, Return 링크에서는 Point-to-point 통신이 요구됨. Traffic 특성상 지속적 통신이 필요하며, 지연 요구 사항은 지상에 비해 덜 제약적이나 신뢰성에 대한 요구 사항이 강함. Orbiter가 탐사선보다 더 많은 통신 자원을 가지며, 로버에서 Orbiter로 전송하는 Return 링크의 Traffic 양이 많음. 단순 Probe부터 견고한 로버 또는 기지국 기능의 로버 등 다양한 사용자 응용을 수용해야 함. 지상국의 예측 가능한 미션 뿐만 아니라 갑작스러운 오류 등에 대처하기 위해 사용자가 직접 통신 시스템을 제어하고 구성할 수 있는 유연성이 필요함.
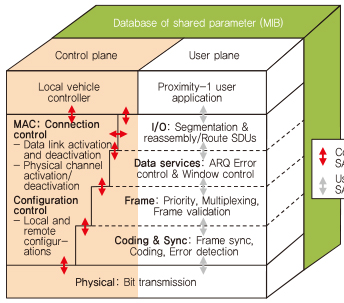
상기 고려사항을 바탕으로 Proximity-1 프로토콜은 신뢰성 있는 전송을 위해 통신 세션 동안 데이터가 순서대로 중복과 빠짐없이 전송되도록 고안되었다. Proximity-1 프로토콜은 데이터 링크 계층과 물리 계층의 두 개의 계층으로 이루어져 있으며, 데이터 링크 계층은 Input/Output, 데이터 서비스, 프레임, MAC, 부호화 및 동기 부계층으로 구성되어 있다[(그림 15) 참조]. Proximity-1이 제공하는 서비스는 사용자가 로컬 및 원격 개체에 통신 링크의 형성 및 설정 변경과 종료를 지시하거나 모니터할 수 있도록 하는 제어 평면 서비스와 사용자로부터 데이터를 받아 지정된 개체에 전송하는 사용자 평면 서비스로 나뉜다[12].
(그림 15)
Proximity-1 구조와 기능 모델
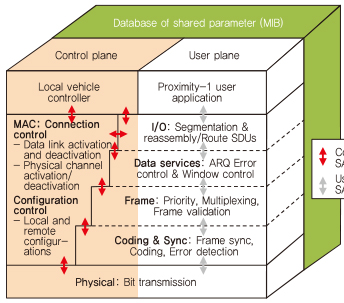
[출처] Proximity-1-1 Space Link Protocol—Rationale, Architecture, and Scenarios, CCSDS 210.0-G-2
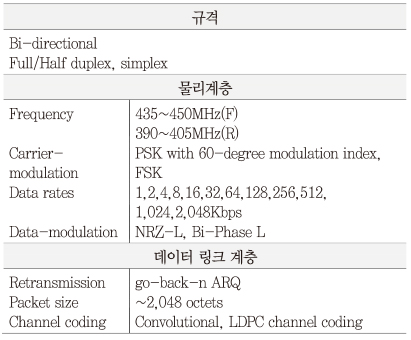
통신 링크의 자동 설정을 가능하게 하는 제어 평면은 전송할 데이터의 유무에 상관없이 사용자에 대해 통신 세션을 설정하고, 원격의 Proximity-1 개체를 제어하며 Proximity-1 timing tag의 교환을 요청하는 기능을 가진다. 제어 평면의 경우 유연성과 수동 제어가 최대로 가능하도록 하기 위해, 통신 세션 형성을 위한 Hailing과 제어시간 재설정 등과 같은 제어 절차는 우주선 내부 제어기와 연동이 필요하다. 즉, Master information base(MIB) 파라미터들은 우주선 제어기를 통하여 설정이 가능하도록 해야 한다. 사용자 평면 서비스는 Proximity-1 사용자들(e.g., DTN) 사이에 SDU(Service data unit)의 전달을 담당하며, Go-back-n ARQ를 이용한 신뢰성있는 전송을 위한 Sequence controlled 데이터 전송 서비스와 빠른 전송을 위한 Expedited 데이터 전송 서비스를 제공한다. Proximity-1의 계층별 규격은 <표 2>와 같다[13], [14].
3. 국내개발 방안
가. 기저대역 개발 방안
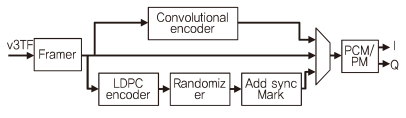
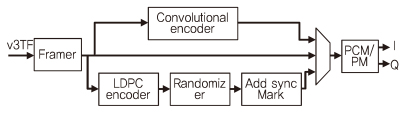
Framer 유닛은 데이터 링크 계층으로부터 Space 링크의 CCSDS 표준 프레임인 V3TF를 입력으로 받아 ASM(Attached synchronization marker) 및 CRC-32 비트를 추가하여 송신 프레임(PLTU)을 만든다. 선택된 오류 정정 부호화 방식에 따라 Convolutional 인코딩과 LDPC 인코딩 중 하나를 수행하고, LDPC 부호화된 데이터는 Codeword에 대하여 Randomiza-tion이 추가로 적용되며 Codeword의 시작을 알 수 있게 CSM 데이터가 추가된다. 채널 코딩된 심볼은 Pulse code modula-tion(PCM) 유닛에서 Bi-Phase-L 인코딩을 수행하고, Phase modulation(PN) 유닛에서 In-phase, Quadrature-phase로 Modulation을 수행하여 출력한다. 송신기 구조는 (그림 16)과 같다.
수신기는 Doppler shift와 송수신기 불일치로 인한 반송 주파수 오차 보정기 및 Carrier tone을 이용한 반송 주파수 위상 보정기, 샘플링 위상 오차 보정기기를 포함한 수신 신호 복조기와 채널 디코더로 구성된다.
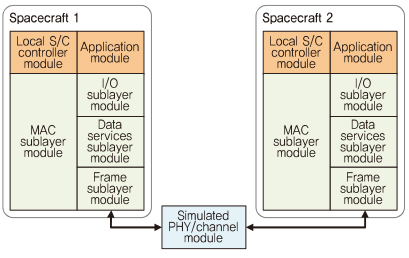
나. 데이터 링크 개발 방안
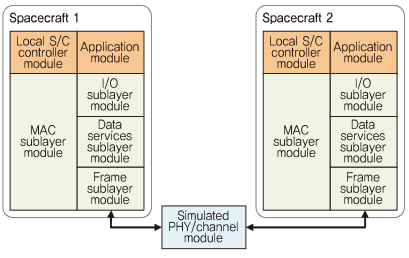
데이터 링크는 로컬 우주선 제어기 모듈 및 애플리케이션 모듈과 simulated PHY/channel 모듈을 포함한 시뮬레이터로 제작되어 각 부계층(Input/output, Data service, Frame, MAC 부계층)의 기능이 검증된다[(그림 17) 참조]. 로컬 우주선 제어기 모듈은 데이터 링크 계층의 기능을 점검하는데 필요한 이벤트를 생성하고, 이에 해당하는 Local directive를 생성하여 데이터 링크 계층에 전달하는 역할을 한다. 애플리케이션 모듈은 데이터 전송 기능의 검증을 위해 트래픽을 생성하여 데이터 링크 계층에 전달한다. 데이터 링크의 각 부계층을 제외한 나머지 모듈은 기능 검증 이후 구현에서 제외된다.
다. Prxoimity-1 구현 Architecture
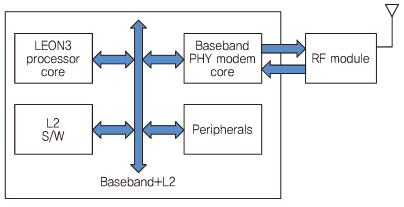
Proximity-1은 지연 요구 사항이 강하지 않기 때문에 데이터 링크의 제어를 담당하는 부분은 S/W로, 계산량이 많은 데이터 링크의 채널 코덱 및 동기부와 신호의 변복조를 위한 기저대역은 H/W로 구현한다. 이렇게 각각 S/W와 H/W로 구현한 데이터 링크와 기저대역은 (그림 18)과 같이 LEON3 프로세서를 통해 SoC (System on a chip) 형태로 통합되며, 기저대역을 제외한 물리계층은 RF 모듈로 별도로 제작되어 SoC 모듈과 연결된다. 인터럽트 및 파일 처리를 위해 RTOS(Real time operating system)의 한 종류인 RTEMS를 사용한다. 따라서 데이터 링크 계층은 RTEMS 기반 위에 제작되어 외부 메모리에 저장되며, 기저 대역은 외부 장치로써 버스 시스템을 통해 LEON3 프로세서에 연결된다.

1단계에서는 기능검증을 위한 모델을 개발할 예정으로 Proximity-1 표준규격에서 지원하는 모든 기능을 포함해서 개발하여 지상시험을 통해 기능 및 성능을 검증할 예정이다. 2단계에서는 탐사선에 탑재하여 운영할 장치를 개발하는데, 1단계의 설계내용을 더욱 소형, 경량화하여 로버에 탑재할 수 있도록 최적화할 계획이다.
Ⅳ. 결론
본고에서는 우리나라의 달 탐사 계획과 달 탐사 프로그램에서 ETRI가 참여하여 개발하고자 하는 우주인터넷(DTN)과 Proximity-1의 기술동향 및 국내개발 현황에 대하여 살펴보았다. ETRI가 개발한 기술이 국내 달 탐사 프로그램에 적용되어 활용되면, 향후 화성탐사는 물론 심우주 탐사의 통신기술로도 활용될 것으로 예상된다. 한편, 우주통신뿐만 아니라 지상통신 분야에서도 활용할 수 있는데, 이동으로 인하여 통신링크의 단절이 심한 통신에 DTN기술이 적용되면 데이터 손실 없이 안정적인 통신이 가능할 것이다. 특히 차량간, 드론 간의 통신을 포함하여 향후 예상되는 이동형 IoT 통신에 DTN 기술의 활용이 기대된다.
약어 정리
AMS
Asynchronous Message Service
AOS
Advanced Orbiting System
ASM
Attached Synchronization Marker
BP
Bundle Protocol
BSS
Bundle Streaming Service
CCSDS
Consultative Committee for Space Data Systems
CFDP
CCSDS File Delivery Protocol
DCC
DTN Control Center
DSN
Deep Space Network
DTN
Delay/Disruption Tolerant Network
EM
Engineering Model
ESA
European Space Agency
ION
Interplanetary Overlay Network
KDSA
Korea Deep Space Antenna
KPLO
Korea Pathfinder Lunar Orbiter
KSLV
Korea Space Launch Vehicle
LCM
Lander Communication Model
LDPC
Low Density Parity-check Code
LTP
Liklider Transmission Protocol
MAC
Media Access Control
MIB
Master Information Base
MOC
Mission Operation Center
NASA
National Aeronautics and Space Administration
RCM
Rover Communication Model
RTEMS
Real Time Executive Multiprocessor System
RTOS
Real Time Operating System
SD U
Service Data Unit
SoC
System on a Chip
TCP/IP
Transmission Control Protocol/Internet Protocol
UDP
User Datagram Protocol
UHF
Ultra-High Frequency
F. Warthman, “Delay and Disruption Tolerant Networks (DTNs): A Tutorial,” Warthman Associates, based on Technology De-veloped by the Interplanetary Internet Special Interest Group, version 2.0, July 2012.
CCSDS 734.2-B-1, Licklider Transmission Protocol (LTP) for CCSDS, Recommended Standard, CCSDS, May 2015.
박주호 외, “우주인터넷과 Delay/Disruption Tolerant Net-working(DTN) 프로토콜 개발 동향,” 항공우주산업기술동향, 제13권 제1호, 2015, pp. 107?117.
J.-H. Jo, B.-S. Lee, and J.-Y. Ahn, “Space Internet Development for Korean Lunar Exploration,” SpaceOps Conf., Daejeon, Rep. of Korea, May 16?20, 2016.
J.-H. Jo, B.-S. Lee, and J.-Y. Ahn, “DTN Payload Development for Korea Lunar Exploration,” JCSAT-2016, Oct. 13?14, 2016.
A.J. Barbieri et al., “Development and Flight Performance of CCSDS Proximity-1 on Odyssey and the Mars Exploration Rovers,” IEEE Aerospace Conf., Big Sky, MT, USA, Mar. 5?12, 2005, pp. 1444?1454.
A. Sharma et al., “Development of CCSDS Proximity-1 Protocol for ISRO’s Extraterrestrial,” Int. Conf. Adv. Comput., Commun. Informatics (ICACCI), Delhi, India, Sept. 24?27, 2014, pp. 2813?2819.
W. Kuhn, J. Jeon, and K. Wong, “A-Low-Power, Radiation-Tolerance, RFIC Micro-Transceiver,” NSMA Symp. VLSI Des., Post Falls, ID, USA, June 5?6, 2007.
CCSDS 210.0-G-2, Proximity-1 Space Link Protocol-Rationale, Architecture, and Scenarios, CCSDS, Dec. 2013.
CCSDS 211.0-B-5, Proximity-1 Space Link Protocol-Data Link Layer, Recommended Standard, CCSDS, Dec. 2013.
(그림 3)
BP를 이용한 Store & forward 방식의 데이터 전송 방법

[출처] Delay- and Disruption-Tolerant Networks(DTNs) A Tutorial, Ver 2.0, 2012. 7.
(그림 4)
DTN과 TCP/IP 통신 전송효율성 비교
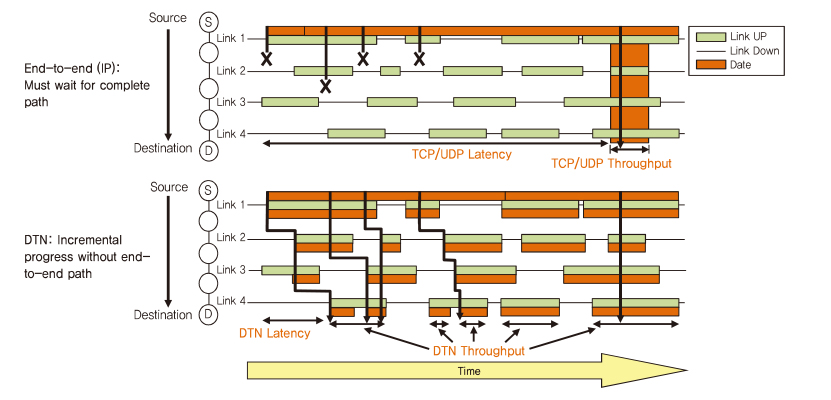
[출처] https://www.nasa.gov/directorates/heo/scan/engnee-ring/technology/txt_dtn.html


(그림 12)
로버용 Proximity-1 Micro-Transceiver

[출처] http://www2.l-3com.com/ce/products/space_ space-craft_communications_uhf_transceivers.htm
(그림 13)
궤도선용 Proximity-1 Micro-Transceiver
[출처] http://www2.l-3com.com/ce/products/space_ space-craft_communications_uhf_transceivers.htm
(그림 14)
Proximity-1 Micro-Transceiver
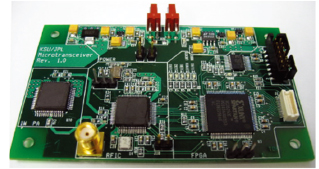
[출처] A Low-Power, Radiation-tolerant, RFIC Micro-Transceiver, 13th NASA Symposium on VLSI Design, June 2007


- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.