차량네트워크에서 지연감내형 네트워킹 연구동향
Survey on Disrupt-/Delay-Tolerant Networking in Vehicular Networks
- 저자
- 정희영, 정재훈, 추창연, 홍용근 / 지능형IoE네트워크연구실
- 권호
- 32권 4호 (통권 166)
- 논문구분
- 일반 논문
- 페이지
- 67-77
- 발행일자
- 2017.08.01
- DOI
- 10.22648/ETRI.2017.J.320408
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- 최근 이슈가 되고 있는 자율주행차(Autonomous vehicle 또는 Self-driving car)를 실현하기 위해서는, 다양한 환경에서도 차량에 대한 끊김 없는 연결을 제공하는 커넥티드카(Connected car) 기술이 필수적이다. 현재 커넥티드카를 구현하기 위한 차량 네트워크(Vehicular network) 기술은 교통시스템 인프라 기반의 단일홉(Single-hop) 무선통신 기술이 주를 이루고 있다. 이러한 단일홉 통신은 커버리지가 교통시스템 인프라가 구축된 지역으로 제한된다. 따라서 차량 네트워크가 현재보다 더욱 넓은 지역을 커버하기 위해서는 차량 자체가 이동형 라우터 역할을 수행하여 차량 간의 전달을 통해 정보를 원거리로 전달할 수 있는 다중홉(Multi-hop) 통신 도입이 필요하다. 다중홉 차량 네트워크는 차량의 높은 동적 특성으로 인해 다수의 도전적인 기술적 이슈들을 가진다. 본고에서는 이러한 기술 이슈 중 차량 네트워크의 높은 이동성으로 발생할 수 있는 종단 노드 간 비연결성을 해결할 수 있는 기술인 지연감내형 차량 네트워킹(Delay-tolerant vehicular networking) 기술에 대한 주요 연구 동향을 살펴보고자 한다. 이를 위해 먼저 지연감내형 차량 네트워킹의 기술적 배경 및 주요 관련 기술들을 분석하고 이를 기반으로 향후 연구개발이 필요한 기술 이슈들을 정리한다.
Share
Ⅰ. 서론
자동차는 현 사회를 지탱하고 있는 핵심 인프라 중 하나이다. 자동차는 인간의 이동성 향상에 크게 기여하여 왔으나, 다른 한편으로는 다양한 사회 문제의 원인이 되기도 한다. 자동차 사고로 인한 인명 피해, 대규모 자동차로 인한 혼잡 및 공해 등이 그 대표적 예이다. 전 세계적으로 연간 백만 명이 넘는 사람이 교통사고로 사망하고 교통체증으로 낭비되는 석유가 미국에서만 39억 갤런에 달하며, 교통수단에서 배출되는 온실가스의 양은 전체 온실가스 배출량의 14%에 달하는 것으로 보고되고 있다[1]. 자동차로 인한 이러한 문제를 해결할 수 있는 방안으로 최근 주목을 받은 기술이 자율주행차이다. 이러한 관심에 힘입어 최근 개최된 세계 양대 전자제품 전시회인 CES과 MWC에서도 자율주행차가 가장 뜨거운 이슈로 주목받았다.
자율주행차는 여러 가지 기반 기술들로 구성된다. 주위 사물 및 교통환경을 인지할 수 있는 다양한 센서 기술과 사람을 대신하여 정보를 분석하고 이를 기반으로 주행을 제어하는 인공지능 기술 등이 그 대표적인 예라고 할 수 있다. 이와 더불어 또 하나의 필수기술이 커넥티드카를 구현하기 위한 차량 네트워크 기술이다. 끊김 없는 네트워크 연결을 통해 자율주행을 위한 필수적인 정보를 제공해주는 커넥티드카는 자율주행차를 실현하기 위한 핵심 요소 중의 하나라고 할 수 있다. 현재 커넥티드카 시장은 빠른 속도록 확대되고 있으며 2020년경에는 출시되는 차량의 75%가 인터넷 연결성을 지원하는 하드웨어가 장착되어 출시될 것으로 예상되고 있다[2].
한편 차세대 네트워크 기술인 5세대 이동통신(5G)에서도 자율주행차를 주요 응용분야로 간주하고 있으며, IoT/IoE(Internet of Things/Internet of Everything) 분야에서도 차량을 인터넷에 연결되어야 할 주요 사물의 하나로 규정하고 있다. 이러한 관점에서 볼 때 차량 네트워크는 자율주행차뿐 아니라 차세대 네트워크 차원에서도 핵심이 되는 분야라고 할 수 있다.
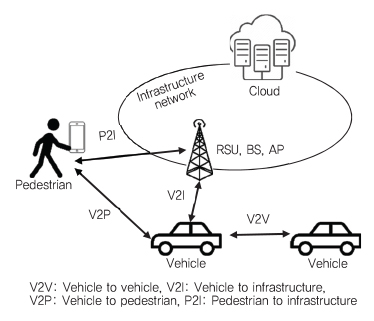
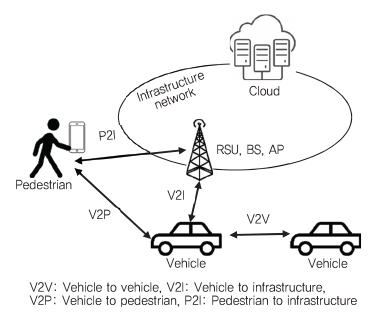
(그림 1)은 차량 네트워크에서 추구하는 V2X(Vehicle to everything)[3] 환경의 예를 보여준다. 그림과 같이 차량 네트워크에서 차량은 차량 간, 차량과 노변 장치, 차량과 네트워크 인프라, 차량과 보행자 간 등 다양한 연결을 지원하며 이를 통해 차량에 필요한 다양한 정보를 적시 적소에 제공한다.
차량 네트워크를 위한 기술로는 IEEE 표준 기반의 WAVE(Wireless access in vehicular environments)가 대표적이다[4]. 이와 더불어 최근 5세대 이동통신 기술 개발의 일환으로 이동통신 기술 기반의 기술들도 제안되고 있다[1]. 그런데 최근까지 주로 연구 개발되고 있는 차량네트워크 기술들을 살펴보면 대부분 차량 간 또는 차량과 네트워크 인프라 간의 단일홉 통신에 기반을 두고 있음을 알 수 있다.
이러한 단일홉 기반 통신은 적용 범위가 네트워크 인프라가 구축된 지역으로 제한된다. 따라서 네트워크 인프라가 구축되지 못한 지역에 차량이 위치하는 경우 위성통신과 같은 특수한 장치가 구비되지 않는다면 차량 간의 통신이나 인터넷 연결에 제한성을 가질 수밖에 없다. 따라서 향후 커넥티드카를 통해 구현하려는 다양한 서비스 제공이 가능하기 위해서는 이와 같이 단일홉 통신의 제한성에서 벗어날 수 있는 다중홉 기반의 통신 기술이 요구된다. 다중홉 통신 기반의 차량 네트워크에서는 차량 자체가 이동형 라우터 역할을 수행하여 차량 간의 다중홉 전달을 통해 지역적으로 네트워크 인프라가 부재한 경우에도 원거리에 있는 차량 또는 네트워크 인프라와 통신을 가능하게 할 수 있다.
다중홉 기반의 차량 네트워크는 차량의 높은 동적 특성으로 인하여 기술적 측면에서 기존의 유무선 네트워크의 다중홉 네트워킹과는 차별되는 설계요구사항을 가진다. 대표적인 예가 차량 네트워크에서는 차량의 빠른 속도와 높은 이동성으로 인해 안정적으로 네트워크 연결을 지속하기가 어려울 수 있다는 것이다. 이는 안정된 종단간 연결을 가정하고 설계된 기존 네트워크 기술에서는 고려되지 못한 요소이다. 이와는 반대로 차량은 그 특성상 전원 공급과 공간 제공에 큰 제약을 받지 않으므로 네트워킹을 위한 전력 소모, 프로세싱 및 저장장치에 제한을 받지 않는다는 통신에 유리한 특성도 지닌다. 이러한 특성은 센서와 같이 주로 제한된 능력을 갖춘 사물을 고려해야 하는 사물인터넷 환경과도 차별화가 되는 부분이다. 따라서 이러한 차량 네트워크의 특수한 환경에서 효율적인 다중홉 네트워킹을 지원하기 위해서는 해결하여야 할 다양한 기술적 이슈가 존재한다고 할 수 있다.
본고에서는 이러한 기술적인 이슈 중에서 차량의 높은 동적 특성으로 인해 종단 노드 간에 지속적인 연결성이 보장되지 않는 환경에서도 통신을 가능하게 해주는 지연감내형 차량 네트워킹 기술에 대해서 살펴보고자 한다. 이를 위해 지연감내형 차량 네트워킹의 기술적 배경 및 주요 관련 기술들을 분석하고 이를 기반으로 향후 연구개발이 요구되는 주요 기술들을 정리한다.
Ⅱ. 기술배경
차량 네트워크는 기존의 유무선 네트워크와는 달리, 빈번한 분리가 발생하는 고도의 동적인 특성을 가지며 차량 간의 통신이 가능한 시간도 짧은 특징을 가지는 것으로 보고되고 있다[5]. VANET(Vehicular Ad hoc networks)는 이러한 동적인 네트워크 토폴로지(Topology)에서의 다중홉 네트워킹을 위해 제안된 기술로 기존의 이동형 애드혹 네트워킹 기술인 MANET (Mobile Ad hoc networks) 기술을 기반으로 한다. VANET에서 고려하는 차량 네트워크의 구체적인 특성은 다음과 같다[6].
• 도로를 기반으로 이동하는 차량의 예측 가능한 이동성.
• 높은 속도의 차량으로 인한 빠른 네트워크 토폴로지의 변화.
• 시간(예, 교통혼잡)과 장소(예, 도심, 시골)에 따른 가변적인 토폴로지.
• 다수의 차량이 네트워크 노드로 동작하는 규모성.
• 차량의 제한된 통신 범위로 인한 네트워크 분리.
• 데이터 처리에 대한 전력 소모 비제한성.
그러나 VANET의 경우 여전히 기존의 통신 방식과 같이 종단간에 통신 경로가 존재하는 것을 가정하고 있으므로 실제 차량 네트워크에서 빈번히 발생할 수 있는 비연결성을 지원하기에는 한계를 가진다. 이러한 문제를 해결하기 위하여 비연결성이 존재하는 통신 환경을 위해 기 설계된 DTN(Delay tolerant networking) 기술을 차량 네트워크에 적용하는 기술들이 2000년 중반부터 지속적으로 제안되었다.
DTN은 2000년 초 기존 인터넷워킹 기술인 TCP/IP가 매우 높은 지연, 낮은 데이터 전송률, 단절 가능성 및 종단간 연결성이 존재하지 않을 수 있는 환경에서 적절하게 동작하지 못한다는 문제 인식에서 개발된 기술로 2007년에 IETF 표준으로 제정되었다[7], [8]. 최초 열악한 연결성을 가지는 행성간 통신을 목적으로 설계되었으나 이외에도 비연결성을 가지는 다양한 분야로의 적용이 제안되었다. 사전에 계획된 일정에 따라 간헐적 연결성을 가지는 센서 네트워크, 종단간 연결성 보장이 어려운 지상 무선 네트워크, 지연이 크고 주기적 연결성을 가지는 위성 통신 등이 적용이 필요한 분야로 고려되고 있다.
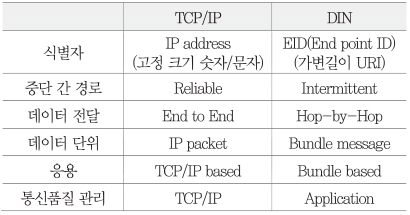
TCP/IP의 경우 기본적으로 연속적이고 양방향성의 종단간 통신 경로가 존재하며 짧은 라운드트립(Round trip) 시간, 높은 전송 신뢰성 및 대칭적인 데이터 송수신 전송률 등을 가정하여 설계되었다. 따라서 이를 비연결성이 존재하는 네트워크 환경에 적용하는 경우 높은 지연으로 인한 TCP 성능의 저하, 패킷 파편화(Fragment)의 손실로 인한 네트워크 계층에서의 성능 저하 및 차량 간의 물리적 비연결성에 의한 라우팅의 단절 같은 문제점을 가진다. 따라서 이러한 문제점을 해결하기 위해 DTN은 OSI(Open systems inter-connection) 계층 구조에서 전송 계층과 응용 계층 사이에 번들(Bundle) 계층을 새롭게 설계하고 종단간 통신이 아닌 번들 계층 간의 SF(Store and forward)라고 불리는 홉간(Hop-by-Hop) 통신을 통해 비연결성이 존재하는 환경에서도 통신할 수 있도록 설계되었다. <표 1>에 기존의 TCP/IP와 DTN의 특징을 간략히 비교하였다.
지연감내형 차량 네트워크(VDTN: Vehicular delay tolerant network)는 이러한 DTN 기술을 차량네트워크에 적용한 기술로 차량 네트워크의 동적인 네트워크 환경에서도 차량 간 또는 차량과 인프라 간의 다중홉 통신을 가능하게 할 수 있다. 즉, VDTN은 DTN에서 진화된 전달 기술인 SCF(Store, carry and forward)[9] 기술을 도입하여 차량 네트워크의 특수한 네트워크 환경을 효율적으로 지원할 수 있도록 기존의 VANET 기술을 진화시킨 기술이라고 할 수 있다.
VDTN은 다음과 같은 다양한 차량 기반 서비스를 제공할 수 있다[10].
• 도로 안전(충돌 방지, 도로 위험 공지를 위한 차량 간 협력 등).
• 교통 상태와 도로 사용률 최적화(도로 혼잡 방지와 트래픽 상태 모니터링 등).
• 센서 데이터 수집을 위한 모니터링 네트워크(날씨, 공해, 노면 상태 등).
• 상업 정보(광고, 마케팅 정보, 여행 정보, 주차 정보 등).
• 엔터테인먼트(인터넷 접속, 멀티미디어 콘텐츠 공유).
• 시골이나 제3세계 등과 같은 벽지 지역에 대한 연결성 제공(파일 전송, 전자메일, 캐시형 웹 접속, 원격진료).
• 기존 네트워크 인프라 사용이 불가능한 재해 지역에서의 응급 통신.
Ⅲ. 주요기술
본 장에서는 VDTN의 주요 기술인 구조, 라우팅 기술, 차세대 네트워킹 기술인 ICN(Information centric networking) 기반의 차량 네트워크 기술 및 벽지 지역에서의 적용 예인 차량전달 네트워크에 대해 설명한다.
1. 구조
전술한 바와 같이 DTN 네트워크는 (그림 2)와 같이 전송 계층과 응용 계층 사이에 새로운 번들 계층이 도입된 DTN 노드들로 구성된다.
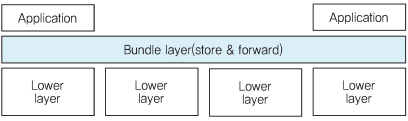
종단 DTN 노드에서 응용 계층의 데이터는 번들 계층에 의해서 메시지 단위로 변환된 후 SF 형태로 동작하는 번들 프로토콜을 이용하여 홉간 통신으로 전달된다. 번들 계층 하부는 OSI 전 계층을 포함하는 다양한 네트워크 기술들이 존재할 수 있다. 응용은 번들 계층을 기반으로 동작하며 교환 메시지 최소화, 통신 중 단절 후 재시작 기능 등 통신 품질 관리를 위한 기능을 포함하여 설계된다.
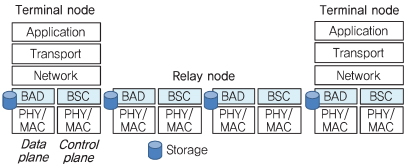
이러한 DTN 구조는 일반적인 구조로 이를 차량네트워크에 그대로 적용하는 경우 여러 가지 비효율성이 있을 수 있다. 따라서 그동안 VDTN을 위해서 다양한 구조들이 제안되었으며, 그 중 (그림 3)과 같은 VDTN 구조가 가장 유력하게 고려되고 있다[11]. 이 구조에서 VDTN은 종단 사용자에 대한 연결을 제공하는 종단 노드(Terminal node), 차량과 같이 종단 노드 간에 메시지를 전달하는 이동 노드(Mobile node) 및 메시지 전송 효율을 높이기 위해 교차로에 위치하는 고정 노드인 전달 노드(Relay node)로 구성된다.

(그림 3)과 같이 VDTN 구조는 기존의 DTN 구조와는 달리 번들 계층이 네트워크 계층과 PHY/MAC 사이에 위치한다. 이를 통해 하나의 메시지에 다수의 IP 패킷을 포함시킬 수 있고, 데이터 프로세싱과 라우팅을 간략화시킬 수 있어서 시스템 복잡성을 낮추고 저비용 및 에너지 소모 감소를 달성할 수 있다.
또한, VDTN 구조는 (그림 3)과 같이 데이터 평면(BAD: Bundle aggregation and de-aggregation)과 제어 평면(BSC: Bundle signaling control)의 분리를 기본으로 한다. 송신단의 BAD는 전송하려는 IP 패킷을 번들 메시지 단위로 모으고 이를 데이터 평면을 통해 전송하고, 수신단의 BAD는 수신한 번들 메시지를 IP 패킷으로 재분리하는 기능을 수행한다. BSC는 VDTN 노드 간 연결 설정을 위한 시그날링 프로토콜로 상대 노드의 특성을 파악하고 데이터 평면에서의 데이터 전송을 위한 준비를 위한 제어 정보를 교환한다. 이러한 데이터 평면과 제어 평면의 분리를 통해 저장 용량이나 대역폭과 같은 데이터 평면에서의 자원과 에너지 소모를 절약할 수 있다.
<표 2>에 기존 DTN과 VDTN 간의 차이점을 간단히 정리하였다.

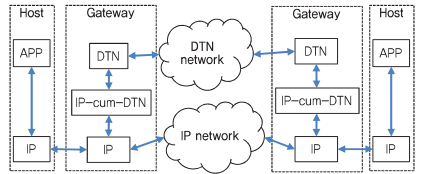
DTN이나 VDTN과 같이 기존의 프로토콜 스택에 번들 계층의 도입은 필연적으로 중복 처리로 인한 오버헤드를 증가시키게 된다. 현재와 같이 IP 기반의 응용이 주가 되는 환경에서는 이러한 오버헤드는 비효율적일 수 있다. 이러한 오버헤드 문제를 해결하기 위해서 하이브리드 형태로 DTN과 IP를 지원하는 구조도 제안되었다. (그림 4)는 ‘IP-cum-DTN’이라는 게이트웨이 기반의 하이브리드 구조를 보여준다[12].

(그림 4)와 같은 게이트웨이 기반의 하이브리드 구조에서는 IP 기반 응용은 만일 종단간 경로가 존재하면 IP 영역을 통해 데이터가 전달되며, 만일 그 경로에서의 단절이 발생하면 동적으로 DTN 영역을 선택하는 형태로 동작한다. 이를 통해 호스트에서는 기존의 IP 기반 응용을 그대로 사용할 수 있어 IP 기반 응용이 주를 이루는 환경에서의 전달 효율성을 향상시킬 수 있다.
2. 라우팅 프로토콜
차량 네트워크는 차량 간 짧은 접촉 시간과 높은 동적 토폴로지를 가지므로, 이러한 환경을 적절하게 지원하기 위한 라우팅 프로토콜 기술은 VDTN 구조와 함께 VDTN의 핵심 기술 이슈라고 할 수 있다. VDTN을 위한 라우팅 프로토콜은 기본적으로 DTN 라우팅 프로토콜들에 기반을 두고 있으며, 이를 차량 네트워크 환경에 맞게 적용하는 방향으로 개발되어 왔다.
DTN 라우팅 프로토콜은 크게 단일 복사본(Single-copy) 방법과 다중 복사본(Multiple-copy) 방식으로 나누어 볼 수 있다[13]. 단일 복사본 방식은 네트워크 노드 간의 포워딩 시 번들 메시지의 단일 복사본만을 유지하는 방식이다. 이 방식은 저장장치나, 대역폭 및 에너지 등의 네트워크 자원을 절약할 수 있으나 낮은 전달률과 큰 지연이 문제가 될 수 있다. 송신 노드가 수신 노드를 만날 때까지 번들을 운반하는 Direct delivery 방식, 처음 만나는 노드에 번들을 전달하는 First contact 방식, 노드의 위치 정보를 기반으로 목적지와의 지리적 거리를 줄이는 방식으로 전달하는 지리적(Geographic) 라우팅 방식이 대표적인 예이다. 반면에 다중 복사본 방식은 노드 간 접촉 시 번들 메시지를 다중으로 복사하는 방식이다. 각 번들 메시지의 복사본은 독립적으로 전달되므로 다중 경로로 인한 전달 확률이 높은 장점을 가진다. 또한, 다중 경로를 통해 최적의 전달 패스를 이용함으로써 전달 지연을 최소화할 수 있다. 반면에 네트워크 자원 소모 측면에서는 큰 비효율성이 존재한다. 다중 복사본의 대표적 예로는 노드가 전달해야 할 번들 메시지의 목록을 관리하며 노드 간 접촉 시 목록에 없는 모든 번들 메시지를 교환하는 Epidemic 방식, 플러딩(Flooding)을 제어하기 위해 번들 당 복사본을 만드는 수를 제한하는 Spray and Wait, 노드 간 접촉 시 전달할 번들과 오버플로(Overflow) 시 버려야 할 번들을 스케줄링하여 우선순위를 관리하는 MaxPro 등을 들 수 있다.
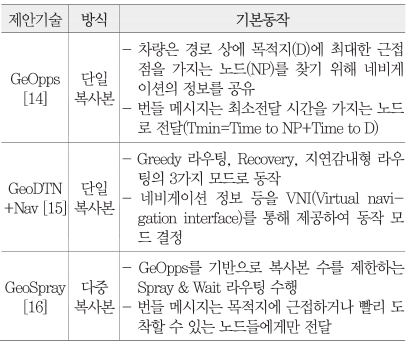
상기와 같이 다양한 프로토콜 중에서 차량 네트워크 측면에서 특히 관심을 가지고 볼만한 라우팅 프로토콜이 지리적 라우팅 프로토콜이다. 지리적 라우팅은 포워딩에 대한 결정이 기본적으로 수신자의 위치에 기반을 두는 라우팅 방식으로 전달할 데이터가 있는 노드가 다른 노드를 만났을 때 상대 노드가 최종 수신자의 위치에 더 가까이 있거나 가까이 갈 가능성이 높은 노드로 데이터가 전달되는 Greedy 라우팅 방식이다. 지리적 라우팅 프로토콜은 각 노드의 위치 정보에 따라서 라우팅을 수행하므로 네트워크는 상태 정보를 유지하지 않는 비상태형(Stateless) 방식이다. 따라서 타 방식 보다 단순하고 효율적이다. 즉, 동적인 차량 네트워크에서 구성하기 어렵거나 오버헤더가 큰 네트워크 토폴로지를 구성할 필요가 없고 네트워크 자원의 소모가 적은 단일 복사본 라우팅을 사용할 수 있다. 또한, 최근 대부분 차량이 내 비게이션 시스템과 같이 GPS 정보나 차량 경로를 기본적으로 활용할 수 있는 환경이 이미 구축되어 있어 각 노드의 위치정보 활용이 용이하다는 것도 지리적 라우팅의 장점이라고 할 수 있다. <표 3>에 지금까지 제안된 주요 지연감내형 지리적 라우팅 프로토콜들의 특성을 간략히 정리하였다.
3. 정보중심 네트워킹(ICN)
차량 네트워크 환경에서 안정적 종단간 연결성을 가정한 호스트 기반의 TCP/IP 기술의 한계를 새로운 네트워크 기술인 정보중심 네트워크(ICN: Information centric networking)를 기반으로 극복하고자 하는 연구가 최근 등장하고 있다. ICN은 기본적으로 정보가 위치한 호스트가 아닌 정보 자체를 기반으로 통신하고자 하는 새로운 통신 방법이다. ICN은 기능적으로 데이터를 상당 시간 저장할 수 있는 네트워크 내 캐싱(In-network caching)을 기본 요소로 포함하고 있어 지연감내형 통신을 구조적으로 지원할 수 있다 특징이 있다.
차량 네트워크의 다중홉 통신을 위해 ICN을 활용하는 경우 기존 TCP/IP 기술에 비해 응용, 이동성 및 보안의 측면에서 장점을 가질 수 있다[3]. 먼저, 응용과 관련하여서는 기본적으로 차량 네트워크의 응용 성격이 도로 노면상태나 트래픽 상황과 같은 콘텐츠를 다루거나 정보 생산자에 독립적인 정보 중심적 성격이면 ICN의 기본 개념에 잘 부합한다. ICN은 또한 기본적 기능인 애니캐스트(Anycast)와 네트워크 내 케슁을 통해 차량이 필요로 하는 정보를 정보의 이름(Name) 기반으로 가장 가까운 저장소와 같이 가장 편리한 노드에서 가져올 수 있어 이동성 관리를 간략화시킬 수 있다. 또한, ICN은 SCF 기능을 구조적으로 지원하므로 이동성으로 인한 비연결 상태에 대해서도 효율적 대응이 가능하다. ICN은 보안 측면에서 호스트 기반의 TCP/IP에서의 채널 보안과는 달리 콘텐츠 자체에 보안을 적용함으로써 개선된 보안 기능을 제공할 수 있다.
(그림 5)는 WAVE 기반의 차량 네트워크에서 ICN를 적용한 구조의 예를 보여준다. 그림에서와같이 ICN은 네트워크 및 전송 계층에서 기존 TCP/IP를 대체하는 기술로 사용될 수 있다.

4. 차량전달 네트워크
세계가 인터넷 기반의 정보 사회로 빠르게 바뀌어 감에 따라 인터넷에 대한 접속은 유엔이 정한 인간의 기본권의 하나로 간주되고 있다. 그러나 아직 전 세계적으로 인터넷에 접속할 수 있는 인구는 전체 인구의 40%에 머물고 있고 나머지 60%의 인구는 인터넷 접속이 어려운 열악한 환경 속에서 생활하고 있는 것으로 보고되고 있다[17]. 구글의 LOON 프로젝트와 페이스북의 internet. org 프로젝트가 이러한 열악한 네트워크 환경에서 인터넷 접속을 지원하기 위해 이루어지고 있는 연구개발의 대표적인 예이다. 지연감내형 차량 네트워크는 이러한 환경에도 유용하게 활용될 수 있는 기술이다.
차량전달 네트워크는 네트워크 인프라가 확보되어 있지 않은 열악한 네트워크 환경에서 차량이 직접 데이터를 전달하는 지연감내형 통신의 한 방법으로 벽지 지역에 저비용으로 인터넷 연결을 제공할 수 있다. DakNet[18]과 이를 발전시킨 KioskNet[19]이 대표적인 기술이라고 할 수 있다. (그림 6)은 실제로 인도와 캄보디아의 시골 지역에서 서비스가 이루어진 DakNet의 개념도이다.
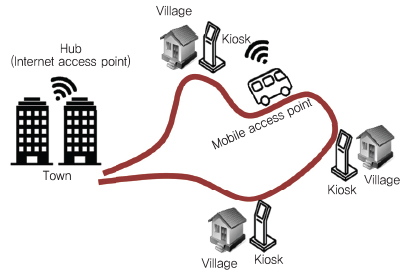
그림에서 각 마을(Village)에 위치한 Kiosk는 인터넷에 대한 연결을 가지지 않기 때문에 버스와 DTN 프로토콜이 Kiosk와 인터넷 연결을 가지는 인근 타운 간의 연결을 위한 게이트웨이 역할을 수행한다. 이동 엑세스 포인트 역할을 수행하는 버스는 Kiosk를 통해 마을 사용자의 인터넷 접속 요청을 받아서 이를 인터넷 접속이 가능한 타운까지 전달하고 그에 대한 응답을 받아 다시 마을 지역으로 이동한 후 Kiosk로 전달한다. 이러한 차량전달 네트워크를 통해 이메일, 웹브라우징, 원격진료, 곡물 가격 정보, 세금 납부와 같은 다양한 인터넷 기반 서비스 제공을 위한 저비용 인프라를 구축할 수 있다.
차량전달 네트워크는 도로를 따라 이동하는 교통 인프라의 특성상 네트워크 노드가 랜덤하게 이동하지 않고 확률적인 라우팅을 수행하는 PRoPHET 라우팅 프로토콜이 사용된다. PRoPHET 라우팅 프로토콜은 접촉한 노드가 목적지 노드를 만난 그동안의 기록(Delivery predictability)에 기반을 두고 복사본을 전달하는 형태로 동작한다[20].
Ⅳ. 연구동향
현시점은 커넥티드카 개념이 적용되고 있는 초기 단계로 지연감내형 차량 네트워크에 대한 연구도 아직 초기 단계라고 할 수 있다. 본 장에서는 현재 IRTF/IETF에서 이루어지고 있는 관련 표준화 동향과 미래 인터넷 연구의 일환으로 이루어지고 있는 연구동향을 소개한다.
1. IRTF/IETF
DTN 표준화는 2000년 초 인터넷 표준 전 단계 작업을 주로 수행하는 기관인 IRTF(Internet Research Task Force) 하에서 DTN 관련 연구를 담당하는 DTNRG (Delay Tolerant Networking Research Group)라는 그룹이 생성되어 관련 기술 논의 및 표준화 작업을 수행하여 오다가 지난 2016년 작업을 최종적으로 마무리하였다. DTNRG 활동을 통해 DTN 구조[7] 및 번들 프로토콜[8]과 같은 DTN의 기반 기술에 대한 표준화가 이루어졌으나 차량 네트워크 부분까지는 진행하지 못하고 작업이 마무리되었다.
차량 네트워크와 관련해서는 그동안 BoF(Birds of a Feather) 형태로 작업이 진행되던 ITS 기술 관련 그룹이 최근 IETF(Internet Engineering Task Force) 내에 새로운 작업반(WG: Working Group)을 신설하였다. IPWAVE(IP Wireless Access in Vehicular Environments)라는 이름으로 2016년 말에 설립된 이 작업반에서는 대표적인 차량 네트워크 기술인 IEEE 802.11 OCB(Outside the Context of a Basic Service Set) 기반 기술에 인터넷 연결을 위해 IPv6를 적용하는 경우 해결하여야 하는 문제점에 대해 논의를 진행하고 있으며[21], 현재 IPv6를 차량 네트워크에 적용 시의 문제점 분석에 대한 작업들이 주로 이루어지고 있다[22]. 그러나 IPWAVE 작업반의 경우 주로 IPv6 기반의 차량 네트워크 기술을 초점을 맞추고 있어 본 고에서 다루고 있는 지연감내형 통신 관련 논의는 아직 다루어지지 못하고 있는 상황이다.
지연감내형 통신과 관련된 또 하나 주목할 만한 그룹으로는 IRTF의 ICNRG를 들 수 있다. Ⅲ장에서 전술한 바와 같이 ICN은 기본적으로 지연감내형 통신 특성을 가지고 있다. ICNRG는 ICN을 위한 기술적 이슈 발굴과 더불어 새로운 네트워크 프로토콜인 ICN를 실제로 적용하기 위한 다양한 시나리오를 개발하는 작업을 수행하였다[23]. 이 작업을 통해 차량 네트워크를 ICN의 적용을 통해 장점을 가질 수 있는 유력한 분야의 하나로 제시하였다.
2. 미래인터넷 기반
2000년 초 이후 현 TCP/IP 기반의 인터넷 기술의 한계를 극복하기 위해 연구가 미래 인터넷이라는 이름으로 전 세계적으로 활발히 진행되었다. 이러한 연구의 대표적인 예가 미국 과학재단의 지원으로 수행된 NDN과 MobilityFirst 프로젝트이다. 두 프로젝트는 기본 네트워크 구조 설계 이후, 다음 단계로 새로운 네트워크 기술을 적용하기 위한 응용 분야를 적극적으로 개발 중이며 차량 네트워크가 유력한 적용분야 중 하나로 고려되고 있다.
최근 네트워크 환경이 빠르게 통신 노드들의 이동성이 증가하는 방향으로 변화하고 있기 때문에 두 미래 인터넷 구조는 모두 지연감내형 통신을 기본적으로 지원하는 구조로 설계되었다. NDN의 경우 ICN의 네트워크 내 케슁 기능을 포함하고 있어 지연감내형 통신 기능을 기본적으로 제공한다. NDN 프로젝트에서는 NDN을 자동차 네트워크 환경에 적용한 V-NDN 기술을 개발하여 차량 네트워크 환경에서의 성능의 우수성을 증명하였으며 이를 오픈소스로 배포했다[24]. MobilityFirst는 기본적으로 무선 위주의 환경에서 지연감내형 통신을 지원하기 위해 설계된 네트워크 구조로 차량 네트워크를 위한 MobilityFirst 기반의 통합적인 구조를 제안하였다. MobilityFirst는 식별자와 주소 간 매핑 시스템인 GNRS(Global name resolution system), 지역적 저장소 및 지연 바인딩(Late binding)을 통해 지연감내형 통신을 구조적으로 지원하며 시뮬레이션을 통해 대규모 차량 네트워크 환경을 효율적으로 지원할 수 있음을 증명하였다[25].
V. 결론
본고에서는 자율주행차 실현을 위한 커넥티드카의 기반이 되는 차량 네트워크 기술 중 지연감내형 차량 네트워킹 기술의 연구 동향을 전반적으로 살펴보았다. 지연감내형 차량 네트워킹 기술은 네트워크 인프라가 미치지 못하는 지역까지 통신 적용 범위를 확대할 수 있어 커넥티드카 실현을 위해 필수적인 기술이나 아직 세계적으로도 초기 연구단계라고 할 수 있다.
본고에서 분석한 지연감내형 차량 네트워킹 기술 외에도 커넥티드카라는 미래 비전을 실현하기 위해서는 해결하여야 할 많은 기술 이슈들이 존재한다. 다양한 유무선 엑세스 기술이 존재하는 차량 네트워크 환경에서 이종 네트워크 간의 효율적인 연동, 차량 및 콘텐츠에 대한 통합 식별체계, 정보중심네트워크와 같은 신개념 네트워크의 적용, 네비게이션 시스템과 같은 차량 장치를 이용한 효율적인 네트워킹, 차량 기반의 응급 통신 체계 등이 대표적인 예이다. 특히 최근 커넥티드카로 인한 차량에 대한 보안 문제가 심각하게 대두되고 있어 이에 대한 기술 개발도 시급히 해결하여야 할 문제라고 할 수 있다[26].
용어해설
DTN(Delay Tolerant Network) 종단간 연결성이 보장되지 않는 환경에서의 비실시간형 통신 제공을 위한 번들(Bundle) 기반의 저장 후 전달(Store and Forward) 통신
VDTN(Vehicular Delay Tolerant Network) 동적인 특성을 가지는 차량 네트워크에서의 비연결성을 지원하기 위한 DTN 기술 기반의 저장, 운반 및 전달(Store, Carry and Forward) 형태의 다중홉 통신
약어 정리
BAD
Bundle Aggregation and De-aggregation
BoF
Birds of a Feather
BSC
Bundle Signaling Control
DTN
Delay Tolerant Network
DTNRG
Delay Tolerant Networking Research Group
GNRS
Global Name Resolution System
ICN
Information Centric Networking
IETF
Internet Engineering Task Force
IoE
Internet of Everything
IoT
Internet of Things
IPWAVE
IP Wireless Access in Vehicular Environments
IRTF
Internet Research Task Force
MANET
Mobile Ad Hoc Networks
NDN
Named Data Networking
OCB
Outside the Context of a Basic Service Set
OSI
Open Systems Inter-connection
SCF
Store, Carry and Forward
SF
Store and Forward
V2X
Vehicle to Everything
VANET
Vehicular Ad Hoc Networks
VDTN
Vehicular Delay Tolerant Network
WAVE
Wireless Access in Vehicular Environments
Qualcomm, “Leading the World to 5G: Cellular Vehicle-to-Everything(C-V2X) Technologies,” June 2016.
J. Greenough, “The Connected Car Report: Forecasts, Competing Technologies, and Leading Manufacturers,” Business Insider, Apr. 28, 2016. http://www.businessinsider.com/connected-car-forecasts-top-manufacturers-leading-car-makers-2016-4-28
M. Amadeo, C. Campolo, and A. Molinaro, “Information-Centric Networking for Connected Vehicles: A Survey and Future Perspectives,” IEEE Commun. Mag., vol. 54, no. 2, Feb. 2016, pp. 98?104.
IEEE 1609 WG, Dedicated Short Range Communication Working Group, IEEE. http://standards.ieee.org/develop/wg/1609_WG.html
A. Rowstron and G. Pau, “Characteristics of a Vehicular Network,” Microsoft Research, July 1, 2009.
G. Grassi et al., “VANET via Named Data Networking,” IEEE INFOCOM Workshop Name Oriented Mobility, Toronto, Canada, Apr. 27?May 2, 2014, pp. 410?415.
W. Ivancic et al., “Store, Carry and Forward Problem Statement,” IETF Internet-Draft draft-ivancic-scf-problem-statement-01, Dec. 2013.
P.R. Pereira et al., “From Delay-Tolerant Networks to Vehicular Delay-Tolerant Networks,” IEEE Commun. Surveys Tutorials, vol. 14, no. 4, 2012, pp. 1166?1182.
V.N.G.J. Soares, F. Farahmand, and J.J.P.C. Rodrigues, “A Layered Architecture for Vehicular Delay-Tolerant Networks,” IEEE Symp. Comput. Commun., Sousse, Tunisia, July 5?8, 2009, pp. 122?127.
J.P. Rohrer and G.G. Xie, “DTN Hybrid Networks for Vehicular Communications,” Int. Conf. Connected Veh. Expo., Las Vegas, NV, USA, Dec. 2?6, 2013, pp. 114?120.
J. Rodrigues and V.N.G.J. Soares, “An Introduction to Delay and Disruption-Tolerant Networks (DTNs),” in Advances in Delay-Tolerant Networks(DTNs): Architecture and Enhanced Performance, Cambridge, England: Woodhead Publishing, Dec. 2015.
I. Leontiadis and C. Mascolo, “GeOpps: Geographical Opportunistic Routing for Vehicular Networks,” IEEE Int. Symp. World Wireless, Mobile Mulimedia Netw., Espoo, Finland, June 18?21, 2007, pp. 1?6.
P.-C. Cheng et al., “GeoDTN+Nav: Geographic DTN Routing with Navigator Prediction for Urban Vehicular Environments,” Mobile Netw. Applicat., vol. 15, no. 1, Feb. 2010, pp. 61?82.
V.N.G.J. Soares, J.J.P.C. Rodrigues, and F. Farahmand, “GeoSpray: A Geographic Routing Protocol for Vehicular Delay-Tolerant Networks,” Inform. Fusion, vol. 15, Jan. 2014, pp. 102?113.
A. Pentland, R. Fletcher, and A. Hasson, “DakNet: Rethinking Connectivity in Developing Nations,” IEEE Comput., vol. 37, no. 1, Jan. 2004, pp. 78-81.
A. Seth et al., “Low-cost Communication for Rural Internet Kiosks Using Mechanical Backhauls,” Proc. Annu. Int. Conf. Mobile. Comput. Netw., LosAngeles, CA, USA, Sept. 23?29, 2006, pp. 334?345.
A. Lindgren et al., “Probabilistic Routing Protocol for Intermittently Connected Networks,” IETF RFC 6693, Aug. 2012.
A. Petrescu et al., “Transmission of IPv6 Packets Over IEEE 802.11 Networks in Mode Outside the Context of a Basic Service Set (IPv6-over-80211ocb),” IETF Internet Draft draft-ietf-ipwave-ipv6-over-80211ocb-02, Mar. 2017.
J. Jeong et al., “Survey on IP-Based Vehicular Networking for Intelligent Transportation Systems,” IETF Internet Draft draft-jeong-ipwave-vehicular-networking-survey-01, Mar. 2017.
K. Pentikousis et al., “Information-Centric Networking: Baseline Scenarios,” IRTF RFC 7476, Mar. 2015.
G. Grassi et al., “Vehicular Inter-Networking via Named Data,” ACM HotMobile 2013, Jekyll, Georgia, Feb. 26?27, 2013.
A. Baid et al., “Enabling Vehicular Networking in the MobilityFirst Future Internet Architecture,” IEEE Int. Symp. Workshops World Wireless, Mobile, Multimedia Netw., Madrid, Spain, June 4?7, 2013, pp. 1?3.






- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.