
강군석 (Kang K.S.) 무인이동체시스템연구그룹 책임연구원
이병선 (Lee B.S.) 무인이동체시스템연구그룹 책임연구원/그룹장
Ⅰ. 서론
다양한 민간 및 공공 분야에서 무인기의 수요가 확대됨에 따라, 유인기가 운용되는 국가 공역으로의 무인기의 진입이 요구되고 있으며, 국가 공역으로의 안정적 진입을 위해서는 유인기 조종사에 의한 시각 감지 및 회피와 동일한 수준의 탐지 및 회피 능력과 함께 유인기 조종사의 수준의 무인기 제어를 위한 신뢰성 높은 제어용 통신링크가 필수적으로 필요하다[1]. 이러한 필요성에 따라 WRC(World Radio Conference)-12에서는 C 대역(5,030~5,091MHz)을 항공이동 업무용으로 신규 분배하였고, WRC-15에서는 무인기 제어용 위성 통신링크 주파수를 신규 분배하였다[2]. 이에 따라 무인항공기 안전운항을 위한 무인기 제어 전용 주파수에서의 국제적으로 표준화된 통신 네트워크 기술 개발 필요성이 대두되고 있다.
미국, 유럽 등 선진국을 중심으로 관련 기술 개발 및 표준화가 진행 중에 있으며 관련 연구 결과를 바탕으로 국제민간항공기구인 ICAO(International Civil Aviation Organization)의 국제 표준화가 진행 중에 있다. 미국 NASA(National Aeronautics and Space Administration)와 Rockwell Collins는 현재 무인기 제어 전용 주파수로 할당된 C 대역과 기존 항공 서비스에 간섭을 주지 않는 조건으로 활용이 가능한 L 대역(960~1,164MHz)을 이중 대역으로 하는 무인기 제어용 지상 통신 네트워크 기술을 개발 중에 있다. 반면 프랑스 Thales의 경우, 무인기 제어 전용 주파수로 할당된 C 대역에서의 무인기 제어용 위성 통신 네트워크 기술을 개발 중에 있다. 미국 NASA와 프랑스 Thales의 무인기 제어용 통신 네트워크 기술 개발 결과는 각각 미국항공무선표준화기구인 RTCA(Radio Technical Commission for Aeronautics)와 유럽항공무선표준화기구인 EUROCAE(European Organization on for Civil Aviation Equipment)에 진행 중인 무인기 제어용 통신 기술 표준화에 적극적으로 활용되고 있다.
국내 또한, ETRI를 중심으로 무인기 제어 전용 주파수 대역에서의 제어용 통신 기술 네트워크에 대한 연구 개발이 진행 중이며, 관련 연구 결과는 국내 TTA, 미국 RTCA, ICAO의 무인기 제어용 통신 기술 표준화에 반영을 추진 중에 있다.
따라서, 본고에서는 이러한 무인기 제어 전용 주파수 대역에서의 무인기 지상 제어용 통신네트워크에 대한 국내외 표준화 동향을 살펴보고자 한다.
Ⅱ. 무인기 제어용 지상 통신 기술 개요
무인기와 함께 이륙/순항, 비행통제, 착륙/회수 등 제어용 통신시스템을 포함하고 전 비행 과정에 필요한 모든 구성 요소를 포괄하여 무인항공시스템(UAS: Unmanned Aircraft System) 또는 원격조종항공시스템(RPAS: Remotely Piloted Aircraft System)이라한다. 이러한 무인항공시스템의 통신링크는 제어용 통신링크와 임무용 통신링크로 구성된다. 임무용 통신 링크는 임무 수행과 관련된 데이터를 전달하기 위한 일반적으로 광대역의 통신링크인 데 반해, 제어용 통신링크는 유인기 공역에서의 무인기의 안정적 진입을 위한 필수 링크로서 (그림 1)과 같이 무인기 제어 정보 및 항공관제센터와의 통신을 위한 정보 등 무인기 안전 운항에 필요한 모든 정보를 무인기 또는 지상의 조종사에게 전달하기 위한 링크이다.
")
항공기의 안전 운항과 관련된 통신링크이기 때문에 고신뢰도의 통신링크를 요구하고 있으며 이를 위해 ITU-R(International Telecommunications Union Radio Sector)에서는 WRC-12와 WRC-15에서 무인기 제어용 통신을 위한 아래의 주파수를 분배하였다.
• ITU-R WRC-12
- C 대역 (5,030~5,091MHz): 안전운항용 무인기 CNPC(Control and Non-payload Communications) 전용 신규 주파수 분배
- L 대역(960~1,164MHz): 안전운항용 무인기 CNPC 주파수로 활용 가능하도록 전파 규칙 개정
• ITU-R WRC-15
- 기존 FDD용 Ka/Ku대역 일부: BRLOS(Beyond Line-of-Sight) 영역에서의 안전운항용 무인기 CNPC 위성주파수 분배
ITU-R에서 무인기 제어용으로 분배한 주파수 대역을 바탕으로 선진국을 중심으로 무인기 제어 전용 통신 네트워크 기술에 대한 기술 개발 및 표준화가 진행 중이다. 미국은 지상 제어용 통신 네트워크를 중심으로 기술 개발 및 표준화가 진행 중에 있으며, 유럽의 경우 위성 제어용 통신 네트워크를 중심으로 기술 개발 및 표준화가 진행 중이다. 이에 따라 상호 보완적으로 유럽의 경우 미국에서 제정하는 지상 제어용 통신 표준으로 유럽 표준을 채택할 예정이며, 미국의 경우 유럽에서 제정하는 C 대역 위성 제어용 통신 표준을 미국의 C 대역 위성 제어용 통신 표준으로 채택할 예정에 있다. 마지막으로 미국과 유럽에서 개발되는 지상 및 위성 제어용 통신 기술은 ICAO에서 개발하고 있는 무인기 제어용 통신 국제 표준에 반영될 예정이다.
따라서, 본고에서는 지상 제어용 통신 기술 표준화가 진행 중인 미국 RTCA와 국제 ICAO의 표준화 동향을 살펴보고자 한다.
Ⅲ. 미국 RTCA 표준화 동향
미국 RTCA는 2013년부터 미국 RTCA 특별위원회(SC: Special Committee)-228을 구성하고 고신뢰성 무인기 제어용 통신과 탐지회피 기술에 대한 최소운용성능 표준(MOPS: Minimum Operation Performance Standard)을 개발 중이다. 무인기 제어 전용 통신 기술은 상기 특별위원회 산하 작업반 WG(Working Group)-2에서 진행 중이다. 2016년 9월 미국 RTCA SC-228 산하 WG-2 작업반에서는 NASA와 Rockwell Collins에서 개발한 P2P(Point-to-Point) 기반 제어용 통신 1단계 모뎀 Prototype을 바탕으로 무인기 지상 CNPC MOPS Phase 1 표준인 RTCA DO-362 표준 개발을 완료한 바 있다[3]. RTCA DO-362에 포함된 Phase 1 제어용 통신 기술의 특징은 다음과 같다.
• 주파수 대역: 이중 대역
- C 대역: 5,030~5,091MHz
- L 대역: 960~1,164MHz
• 링크 가용도: 단일 대역 99.8%, 이중 대역 99.999% 목표
• 이중화: 인접 송수신간 간섭 회피를 위해 GPS기반의 동기화된 시간분할이중화(TDD: Time Division Duplex)
• 프레임 주기: 50ms(제어 정보 전송 최대 빈도 수, 20Hz 고려)
• 변조 방식: GMSK(Gaussian Minimum Shift Keying) with BT = 0.2(BT = Bandwidth × Symbol Rate)
• 부호화 방식: Puncture Turbo Coding
• 하향링크 전송 주요 특징: 탑재 → 지상 무선국
- 다중접속 방식: FDMA(Frequency Division Multiple Access)
- 심볼율 및 전송대역폭: <표 1> 참조

• 상향링크 전송 주요 특징: 지상 → 탑재 무선국
- P2P형 다중접속 방식: FDMA
- P2MP(Point-to-MultiPoint)형 다중접속 방식(DO-362 표준의 부록에 포함): FDMA(GRS: Ground Radio Station, 별로 다른 주파수) /TDM(Time Division Multiplexing) (GRS내 무인기별 다른 시간 슬롯)
• 심볼율 및 전송대역폭: <표 2> 참조

현재는 네트워크 기반 지상 및 위성 CNPC 표준화를 위한 Phase 2 표준화 단계가 진행 중에 있으며, 2017년 말, Phase 2 표준화 내용 및 표준화 범위를 정의하는 무인기 제어용 통신 Phase 2 표준화 백서를 제정한 바 있다. 상기 표준화 백서에 따르면 2020년까지 진행 예정인 무인기 제어용 통신 네트워크 2단계 표준화 내용 및 범위는 다음과 같다[4].
• Phase 2 작업 범위
- BRLOS 환경에서의 무인기 운용을 위한 무인기 제어용 지상 및 위성 통신 기술 표준
• C2(Command and Control) 링크 기능 정의 및 구분
- CNPC 링크 기능: 계층 1~2 포함
- CNPC 네트워크 기능: 3 계층 이상 포함
• Networking Capability에 따른 3 가지 C2 링크 시스템 구분
- Fully Networked 시스템
- Partly Networked 시스템
- Non-network Enabled 시스템
• Phase 2 개발 표준 문서
- C2 링크 MASPS(Minimum Aviation System Performance Standards) 표준: End-to-End C2 링크 기능 및 성능 요구사항 정의
- CNPC 링크 MOPS 표준: 기술 Specific CNPC 링크 Normative 기능 및 성능 요구사항 정의
- CNPC 네트워크 Guidance Material: 다양한 CNPC 네트워크 Informative 기능 및 성능 요구사항 정의
• 개발 일정
- C2 링크 MASPS: 2018년 12월까지
- CNPC 링크 MOPS(위성): 2019년 3월까지
- C2 링크 MASPS 개정본: 2019년 12월
- CNPC 링크 MOPS 개정본(위성): 2020년 3월
- CNPC 링크 MOPS 개정본(지상): 2020년 6월
향후 FAA(Federal Aviation Administration)는 RTCA에서 개발하는 무인기 제어용 통신 관련 MOPS 표준을 바탕으로 무인항공기 관련 기술표준규칙(TSO: Technical Standard Order)을 마련할 예정이며 또한, 미국 RTCA의 기술 표준화 결과는 ICAO의 무인항공시스템 관련 SARPs(Standards and Recommended Practices) 표준 개발에 적극 반영될 예정이다.
Ⅳ. 국제 ICAO 표준화 동향
국제민간항공기구인 ICAO는 항공기 시스템의 운용 및 안전성능 요구사항, 상호운용성 요구사항, 항공기 시스템 및 운용 최소 요구사항 등의 국제 표준을 개발하고 있다. ICAO는 현재 무인항공기시스템 연구패널인 RPASP(Remotely Piloted Aircraft System Panel)를 구성하여 산하 WG2 작업 그룹에서 무인항공기 제어용 통신 기술 표준화를 진행 중에 있다.
RPAS 패널에서는 2030년까지 6년 단위로 이루어지는 항공시스템 블록 업그레이드 일정에 맞추어 2018년 무인기 제어용 통신 기술 1 단계 표준화 완료, 2020년 2 단계 표준화 완료를 목표로 표준화 작업이 진행 중에 있다. 1 단계 표준화에서는 기술 중립적 상위 레벨 요구사항 표준(SARPs: Standards and Recommended Practices)을 제정할 예정이며 2 단계 표준화에서는 구체적 기술 레벨의 무인기 제어용 통신링크 SARPs를 개발할 예정에 있다. 2 단계 기술 세부적 표준화에서는 미국 RTCA와 유럽 EUROCAE의 연구 결과를 준용하여 무인기 운용 관련 기술적 세부사항은 마련하기로 하였으며[5], 이에 따라 RTCA의 기술 표준화 결과는 ICAO의 RPAS 관련 SARPs에 반영될 예정이다[(그림 2) 참조].
")
현재 WG2 레벨에서 논의가 완료되어 2018년 6월 개최 예정인 12차 RPAS 패널 회의에서 최종 승인될 예정인 기술 중립적 C2 링크 1단계 SARPs의 주요 내용은 다음과 같다.
• C2 링크 개념
- Non-segregated 공역으로의 RPAS의 안정적 진입을 위해 필요한 Aviate, Navigate, Communicate, Integrate 정보를 RPS(Remotely Piloted Station)와 RPA(Remotely Piloted Aircraft) 간에 교환하기 위해 사용되는 논리적 연결
• C2 링크 구조
- RLOS(Radio Line-of-Sight): 송수신기가 상호 링크 커버리지 내에 있으면서 RPA와 RPS 간의 정보 교환이 특정 Time-frame 내에 이루어지는 구조(지상 P2P와 저 지연 지상 네트워크 포함)
- BRLOS(Beyond Radio Line-of-Sight): RPA와 RPS 간 정보 교환이 RLOS 링크 구조의 Time-frame 내에서 이루어질 수 없는 모든 링크 구조(위성 및 고지연 지상 네트워크 포함)
• C2 링크 기능
- C2 링크 관리: C2 link opening and closing, C2 link management, C2 link data recording 등
- Aviation: Command and control, handover 등
- Navigate: Navigation planning and execution
- Integrate: Traffic awareness, external situational awareness, 등
• C2 링크 성능
- C2 링크 성능 요구사항은 무인기 운용 단계(이륙, enroute, 착륙 등), 운용 공역(공역 A, B, C, D, E 등), 링크 지원 기능(Aviate, Communicate, Navigation, Surveillance)에 따라 상이함
- 또한, 무인기 자율화 레벨에 따라서도 C2 링크 성능 요구사항이 상이함(무인기 자율화 레벨이 높을 경우, 낮을 경우에 비해 C2 링크 성능 요구사항이 낮음)
• Lost C2 링크
- 3가지 C2 링크 상태 정의: Nominal C2 링크, Lost C2 링크, Lost C2 링크 Decision
- 분리 환경별로 요구되는 Lost C2 링크 Decision 시간은 2단계 표준화에서 결정하기로 함
• 통신 서비스 제공자
- RPA와 RPS 사의 C2 링크 형성을 위해 통신 서비스 제공자가 고려될 수 있으며, 통신 서비스 제공자는 민간항공관할청(CAA: Civil Aviation Authority)의 안전 및 보안 관리 감독 하에 있거나 RPAS 운용자의 Safety Manage-ment System에 포함되어야 함
• C2 링크 주파수 스펙트럼 관리
- 고신뢰도 C2 링크 확보를 위해 항공 안전 서비스용으로 할당된 주파수 대역 사용 필요(예, C 대역(5,030~5,091MHz): 위성 및 지상 C2 링크용으로 활용 가능)
- 다양한 RPAS 운용이 예상되는 지역에서의 C2 링크 주파수 할당 및 관리 방안 마련 필요
Ⅴ. 국내 표준화 동향
2015년 과학기술정통부에서는 WRC-12에서 신규 분배된 무인기 제어 전용 C 대역에 대한 지상 CNPC 무선 설비 간 상호양립성을 보장하기 위한 무인기 제어용 통신 무선설비 기술 기준을 마련한 바 있다. 국제적으로 상호양립성을 보장하기 위해 미국 RTCA 표준을 준용하였으며, 2016년 재정된 미국 RTCA DO-362 표준에 맞게 기존 무선설비 기술 기준을 2017년 업데이트를 완료한 바 있다.
또한, TTA에서는 산하 특수통신 프로젝트 그룹인 PG903에서 ETRI에서 연구 개발을 진행 중인 무인기 제어 전용 C 대역 기반 무인기 제어용 지상 통신 기술을 바탕으로 지상 CNPC 무선인터페이스 국내 표준화가 진행 중에 있다. 2017년 말 지상 CNPC 무선인터페이스 물리계층 TTA 표준 제정이 완료되었으며, 현재는 무인기 제어용 통신 상위계층 표준화 추진이 예정되어 있다. 2017년 말 제정된 물리계층 국내 표준은 미국 RTCA DO-362 표준에서 정의사고 있는 미국 NASA와 Baseline Radio를 기반으로 호환성을 가지면서 일부 고도화 기술이 추가되었다. 예를 들어 이착륙 및 긴급 시 저속 영상데이터를 제공하기 위한 이착륙 및 긴급용 비디오 채널이 새롭게 추가되었으며, 터보 부호화의 성능을 향상시키기 위해 새로운 터보 인터리버를 적용하였다. TTA 표준에 정의된 새로운 터보 인터리버는 현재 미국 RTCA 표준화에서도 DO-362 표준 개정 작업 시, 기존 터보 인터리버를 대체할 예정이다.
Ⅵ. 결론
지금까지 무인기 제어용 통신 네트워크 기술 개발 및 표준화 동향에 대해 살펴보았다. 무인기 기술 발전 추세에 따른 무인기의 수요 증가를 고려할 때, 유인기 공역으로의 무인기의 진입이 임박하고 있으며 따라서 이에 대한 준비가 요구된다. 유인기 공역으로의 무인기의 안정적 진입을 위해서는 유인기 조종사에 의한 시각 감지 및 회피와 동일할 수준의 탐지 및 회피 능력과 함께 유인기 조종사의 수준의 무인기 제어를 위한 신뢰성 높은 제어용 통신링크가 필수적이다. 이에 따라 ITU에서 분배된 무인기 제어 전용 주파수 대역에서의 표준화된 무인기 제어 전용 통신 네트워크의 필요성이 증대되고 있다. 마지막으로 글로벌 시장 진입 및 선점을 위해서는 미국 NASA, 유럽 Thales 등 선진기관과의 협력과 함께 미국 RTCA, 국제 ICAO 등 국제표준화 단체에서의 적극적인 활동이 요구된다. 특히, 무인기 제어 전용 주파수 대역에서의 지상 제어용 통신 네트워크 기술의 경우 국제적으로 기술 개발 및 표준화가 아직 시작 단계이기 때문에 관련 기술 및 표준화 선점이 유리할 것으로 판단되며, 현재까지 Fast-Fallower 접근은 시도했던 항공 분야에서 First Mover가 될 수 있는 분야로 전망된다.
약어 정리
AEAT
Advanced Emergency Alert Table
ATC
Air Traffic Control Centre
BRLOS
Beyond Radio Line-of-Sight
C2
Command and Control
CAA
Civil Aviation Authority
CNPC
Control and Non-Payload Communications
DC
Data Class
EUROCAE
European Organization for Civil Aviation Equipment
FAA
Federal Aviation Administration
FDMA
Frequency Division Multiple Access
GCS
Ground Control Station
GRS
Ground Radio Station
GMSK
Gaussian Minimum Shift Keying
ICAO
International Civil Aviation Organization
ITU
International Telecommunications Union
ITU-R
ITU Radio Sector
MOPS
Minimum Operation Performance Standard
NASA
National Aeronautics and Space Administration
P2P
Point-to-Point
P2MP
Point-to-MultiPoint
RLOS
Radio Line-of-Sight
RPA
Remotely Piloted aircraft
RPAS
Remotely Piloted Aircraft Systems
RPASP
Remotely Piloted Aircraft System Panel
RPS
Remotely Piloted Station
RTCA
Radio Technical Commission for Aeronautics
SA
Spectrum Authority
SARPs
Standards and Recommended Practices
SC
Special Committee
TACAN
Tactical Air Navigation System
TC
Telecommand
TDD
Time Division Duplex
TDM
Time Division Multiplexing
TM
Telemetry
TSO
Technical Standard Order
UAS
Unmanned Aircraft System
UL
Uplink
WG
Working Group
WRC
World Radio Conference
References
(그림 1)
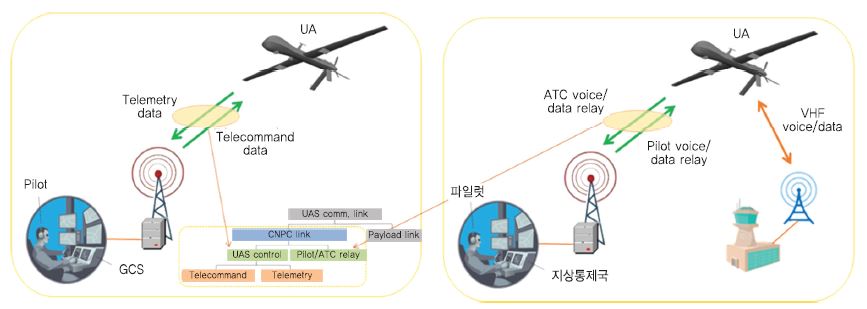
무인항공시스템(Unmanned Aircraft System)의 구성요소
<표 1>

하향링크 채널 특징
<표 2>
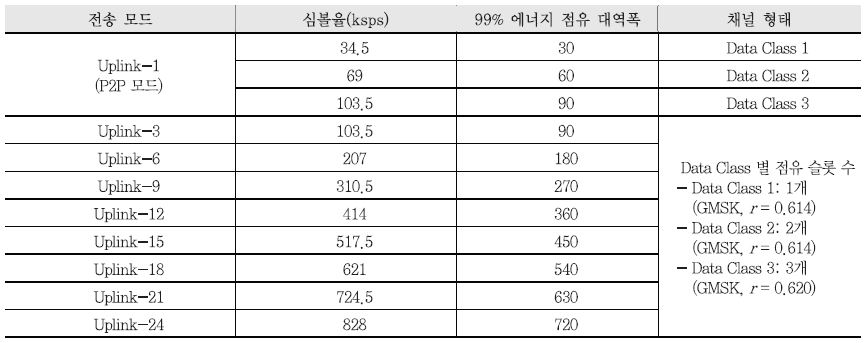
상향링크 채널 특징
(그림 2)

ICAO/RTCA/EUROCAE 관계