안티 드론 기술 동향
Recent R&D Trends of Anti-Drone Technologies
- 저자
-
최상혁무인자율운행연구그룹 shchoi0226@etri.re.kr 채종석무인자율운행연구그룹 jschae@etri.re.kr 차지훈무인자율운행연구그룹 jihun@etri.re.kr 안재영자율무인이동체연구본부 jyahn@etri.re.kr
- 권호
- 33권 3호 (통권 171)
- 논문구분
- 일반논문
- 페이지
- 78-88
- 발행일자
- 2018.06.01
- DOI
- 10.22648/ETRI.2018.J.330309
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- As the unmanned aerial vehicle industry and its related technologies grow each year, the number of abuse cases caused by drones is increasing. In addition to the invasion of privacy caused by indiscriminate photography, terrorism using unmanned aerial vehicles, which have a low detection probability, high location accuracy, and the capability of targeting people or places, as well as carrying chemicals, radiation materials, and small bombs, is becoming a significant problem around the world. Accordingly, many companies are developing anti-drone solutions that consist of various technologies such as radar, EO/IR cameras, and RF jammers to detect and disable unmanned aerial vehicles. This article briefly introduces the recent R&D trends and technical levels of anti-drone technologies.
Share
Ⅰ. 머리말
일반적으로 ‘드론’으로 널리 알려져 있는 비행 장치는 무인항공기, 무인비행체 등의 다양한 용어가 혼용어 사용되고 있다. 이는 원격조종이나 자율비행으로 시계 밖 비행이 가능하며, 승객이나 승무원을 운송하지 않는 이동체로 정의된다. 무인비행체의 실전 활용은 1900년대 중반에 군사용으로 투입되어 정찰 임무를 수행하였으며, 기술의 발전과 함께 후반부에는 공격용으로 활발하게 활용이 시작되었다. 2000년 이후에는 기술의 발전과 함께 부품의 경량, 저가화로 민간 부문에서 다양한 산업과 레저용으로 각광을 받고 있다. 조작의 편의성과 경제성 측면에서 다양한 분야의 활용도가 높아져 현재 방송영화 촬영, 사람의 접근이 어려운 산업현장의 진단을 위한 촬영, 측량, 재난, 재해, 구호 등 다양한 산업에 활용되고 있다.
그러나 무인비행체의 기술이 발전함에 따라 이를 악용하는 사례도 점점 늘어나고 있다. 무인비행체를 이용한 무분별한 촬영으로 사생활의 침해하는 사건뿐만 아니라 무인비행체의 낮은 피탐지율, 높은 위치 정밀도, 비행체 제작 용이성 등의 특징을 활용한 악의적 목적을 가지는 개인이나 단체에 의한 특정 인사나 장소를 표적으로 하는 화학물질, 방사선 물질 및 소형폭탄 운반 등의 테러에 준하는 위협 사례들이 전세계적으로 문제가 되고 있다.
이에 따라 저고도에서 침입하는 무인비행체를 탐지하고 무력화시키기 위하여, 여러 기술을 종합한 무인비행체 대응용 대공 방어 솔루션을 갖춘 시스템(Anti-Drone Technology)들이 여러 나라에서 개발되고 있다. 현재 한국전자통신연구원에서도 2017년 4월부터 경찰청을 수요부처로 ‘무인비행장치의 불법 비행 감지를 위한 EO/IR 연동 레이다 개발 및 실증시험’이라는 과제명으로 무인비행체의 침입을 탐지하고, 탐지된 불법 무인비행체의 위치 정보를 대응체계로 전달하는 것을 목적으로 하는 과제를 수행하고 있다.
본고에서는 현재 드론산업의 발전과 함께 성장하고 있는 안티 드론 관련 산업 기술개발을 촉진하고자, 현재 개발되고 있는 국가별 안티 드론 기술들에 대하여 간략히 소개하고자 한다.
Ⅱ. 안티 드론 시스템 요소 기술
안티 드론 시스템은 무인비행체의 접근을 탐지하는 무인비행체 탐지 기술과 드론의 비행을 무력화시키는 무력화 기술이 융합된 시스템이다.
1. 센서에 따른 탐지 기술 분류
안티 드론 시스템에서는 위협체의 접근을 탐지하기 위하여, 광학, 음파, 방탐, 레이다 등 다양한 센서를 활용하고 있다. 센서에 따른 탐지 기술별 특징은 다음과 같다.
가. 음향 탐지 센서
드론이 동작할 때 프로펠러의 회전으로 인해 발생하는 특유의 소음을 탐지하는 기술로, 소음이 많은 환경에서는 탐지하기 어렵다는 단점이 있다. 다른 센서와 비교하여 최대 탐지 거리는 짧은 편이나 가격이 싸다는 장점이 있다.
나. 방향 탐지 센서
무인비행체의 조종 신호는 Industrial Scientic and Medical(ISM) 대역인 2.4GHz 대역(제어신호 송수신용)과 5.8GHz 대역(영상데이터 송수신용)을 주로 사용하고 있다. 이 대역의 RF(Radio Frequency) 신호의 방향과 위치를 방향 탐지 센서를 이용해 조종자 및 무인비행체의 위치 추정이 가능하다. 단, WiFi 주파수와 동일하므로 WiFi가 많이 설치되어 있는 도심에서는 조종신호와 구분하기 어려운 것이 단점이지만, 방향 탐지 센서를 고지대에서 운용 시 다른 센서와 달리 조종자의 위치까지도 추정할 수 있다는 장점이 있다.
다. 영상(Electro Optic/Infrared) 센서
가시광선 영역과 적외선 열화상 영역의 영상정보를 활용하여 움직이는 무인비행체를 탐지하는 기술이다. 먼 거리에 떨어져 있는 무인비행체를 탐지하기 위해서는 렌즈 줌을 통한 망원 상태에서 바라보아야 하며, 망원 상태에서는 시야각이 좁아지는 만큼 보통 위협체의 대략적인 위치 정보 전달이 가능한 센서와 연동하여 운용되고 있다. 위협체의 형상을 운용자가 직접 확인할 수 있기 때문에, 접근 중인 위협체가 무인비행체인지 아닌지 식별하기 위한 수단으로 활용되고 있다. 낮과 밤에 모두 활용하기 위하여 Electro Optic(EO) 장비와 Infrared(IR) 장비를 동시에 운용한다. 열화상 센서 관련 광학계의 제작비용이 매우 비싸다는 단점이 있다.
라. 레이다(Radar) 센서
위에서 언급된 센서들과는 달리 스스로 에너지를 방사하는 센서(Active Sensor)로 특정 대역의 RF 신호를 송출하고 표적으로부터 반사되어 돌아오는 신호를 수신하여 표적을 탐지한다. 날씨, 온도, 낮/밤 등에 무관하게 안정적인 탐지 성능을 보장하는 전천후 센서로 최대 탐지 거리가 다른 센서와 비교하여 길다는 장점이 있다. 다른 센서에 비해 제작/구매/도입 비용이 매우 높은 편이며, 스스로 신호를 송출하기 때문에 다른 시스템으로의 간섭 문제 등을 고려해야 하며, 운용하고자 하는 주파수 대역의 할당 등 정부의 제도적 승인 및 지원이 요구된다.
2. 물리력에 따른 비행 무력화 기술 분류
안티 드론 시스템에서는 탐지된 위협체가 무인비행체임이 식별된 경우 여러 무력화 장비를 이용해 무인비행체를 격추하거나, 포획, 추락시키고 있다. 무인비행체 무력화를 위해 사용되는 방법에 따른 무력화 기술별 특징은 다음과 같다.
가. 전파 교란 기술
무인비행체가 비행하는 데 있어서 가장 중요한 대역은 조종 신호를 받는 ISM 2.4GHz 대역과 무인비행체가 자신의 고도 및 위치 정보를 획득하는 Global Navigation Satellite System(GNSS) 대역이다. 전파 교란을 통해 무인비행체를 무력화하는 방법으로 조종 신호를 받는 ISM 2.4GHz 대역에 방해 전파를 방사하여, 무인비행체의 제어를 무력화하는 기술이 널리 사용되고 있으나, 경로 계획에 의해 자율 비행 중인 무인비행체의 경우 전파 교란에도 문제없이 계속해서 목적지를 향해 비행이 가능하다는 단점이 있다.
무인비행체 탑재용 GNSS 수신기의 가격 하락으로, 최근에는 GPS(Global Positioning System, 미국), GLONASS(Global Navigation Satellite System, 러시아), Galileo(유럽), Beidou(중국)의 신호 중 2개 이상의 신호를 수신하는 무인비행체들이 다수이기 때문에 GNSS 대역 전부를 전파 교란 시키는 장비를 이용해 자율 비행 중인 무인비행체를 무력화시키는 장비들이 개발되고 있다. 실제 ISM 대역이나 GNSS 대역에 높은 출력의 교란 신호를 방사하는 것은 민간에 큰 피해를 주기 때문에, 전파 교란 장비 사용 시 유의하여야 하며, 송출시간, 신호의 출력, 운용 장소 등 정부의 제도적 지원이 필요하다.
나. 파괴 기술
무인비행체에 직접 물리력을 가해 파괴하는 기술로 접근하는 무인비행체를 향해 산탄총을 발사하여 무인비행체를 격추시키는 방법과 레이저 빔을 조사하여 무인비행체의 기체를 태워 격추시키는 기술이 존재한다. 전파 교란 방식보다 확실히 무인비행체를 추락시킬 수 있다는 장점이 있으나, 추락하는 무인비행체와 파편들로 인한 2차 사고가 발생할 수 있는 우려가 있으며, 먼 거리에서 빠른 속도로 이동 시에는 격추가 어렵다는 단점이 있다.
다. 포획 기술
위에서 언급된 다른 방법과 비교하여 추락하는 비행체 및 파편으로 인한 2차 사고를 예방할 수 있는 방법으로 무인비행체를 직접 독수리를 이용해 포획하거나 무인비행체에 장착된 그물망, 혹은 지상에서 발사하는 그물망을 활용해 포획하는 기술이 활용되고 있다. 그러나 무인비행체의 경우 중량이 10kg 정도인 DJI Matrice-600 등의 기종은 독수리가 포획하기에는 너무 무겁고, 회전하는 프로펠러에 부상당할 위험이 있다. 무인비행체 하단에 그물망을 설치하여 불법 무인비행체를 포획하는 방식은 고속으로 이동하는 무인비행체 포획에 적합하지 않다는 단점이 있다. 지상에서 그물망을 발사하는 방식의 경우 무인비행체가 매우 근접한 거리에서 사용이 가능하다.
Ⅲ. 국가별 기술 동향 및 수준
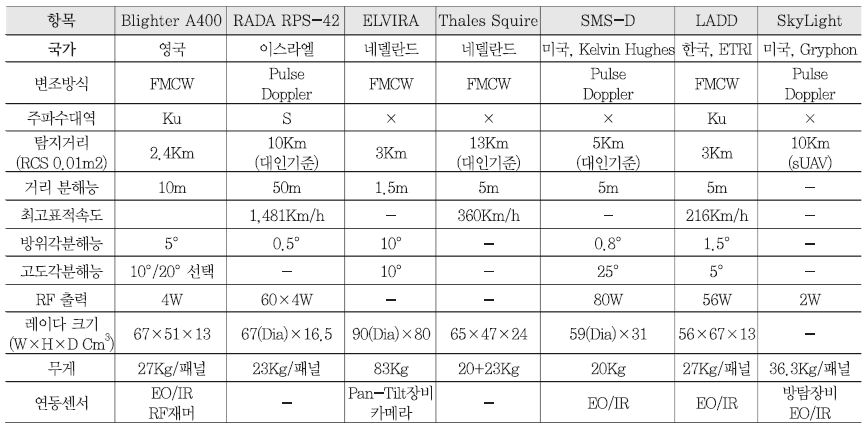
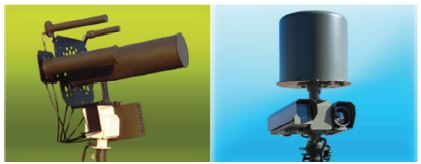
무인비행체를 탐지하고 무력화시키기 위하여, 국가별로 개발 중인 기술의 수준은 <표 1>에 간략히 정리하였다. 시스템별 형상은 국가별 기관별 기술의 특징을 소개하는 장에 첨부되었다.
1. 네델란드
가. Robin Radar System 사의 ELVIRA
360° 전방위를 커버하며, 큰 고정익 무인비행체는 9km, 소형 멀티로터는 3km까지 탐지한다. 동일한 위치를 1.3초마다 한 번씩 스캔하는 갱신율을 가지며 다양한 정보를 결합하여 무인비행체를 새 등과 같은 다른 비행물체와 구분하는 기능을 가지고 있다. 2015년 6월 Bavaria에서 개최된 G7 정상회의에서 VIP 경호에 사용되었다[1], [(그림 1) 참조].

나. Thales Netherlands사의 Squire
Squire는 타사와 마찬가지로 국경, 해안 및 지역을 비행하는 무인비행체 감시용으로 개발되었고, 특히 최첨단 Graphic Processing Unit(GPU) 기반 신호처리와 표적 분석 기능을 강조하고 있다[2], [(그림 2) 참조].

2. 영국
가. MGT Europe의 DroneRANGER
영국 런던에 소재한 MGT Europe이 설계하고 이태리 Varese의 VTE가 제작하며, 무인비행체를 검출, 추적하고 무력화하는 시스템이다. 초소형 무인비행체를 2km까지 탐지한다. 재밍 시스템은 무인비행체가 사용하는 모든 Radio Control(RC) 주파수뿐만 아니라 무인비행체가 자동운항을 할 때 사용하는 GNSS 주파수도 교란시킨다. 레이다의 안테나 형태는 Pan-Tilt 장비에 장착된 지향성 안테나로 기계적 빔 조향이 이뤄진다[3], [(그림 3) 참조].
(그림 3)
DroneRager(전파교란기)와 Radar and Camera System
[출처] DroneRanger. http://www.mgteurope.com/mgt-droneranger-anti-drone-uav-detection-system/
나. Blighter사의 AUDS
Blighter사의 Anti-UAV Defence System(AUDS)은 원격에서 UAV를 검출, 추적, 분석하고 UAV의 비행을 중지시킬 수 있는 시스템으로 Blighter A400 Series Air Security Radar, Chess Dynamics 사의 Hawkeye DS(Development System)와 EO Video Tracker, Enterprise Control System 사의 Directional RF Inhibitor 등 3개사의 레이다, EO/IR 광학 장비, 그리고 전파 교란기 3종의 장비가 결합된 시스템이다[4], [(그림 4) 참조].

3. 스페인: Advanced Radar Technology 사의 Drone Sentinel
매우 작은 RCS를 가지는 무인비행체의 검출과 추적에 특화된 시스템으로 레이다가 표적을 검출하고 경보와 추적을 개시하면 주·야간 작동하는 광학 플랫폼이 분석을 수행한다. 하나의 마스트에 레이더와 주·야간 광학 장치를 설치하여 회전하며 감시하는 시스템으로 상용 제품 중 가장 빠른 스캔 업데이트 속도인 1Hz를 가진다. RCS 0.0005m2의 표적을 2km 거리까지 탐지한다[5], [(그림 5) 참조].

4. 독일: Aaronia사의 Advanced Automatic RF Tracking and Observation Solution
무인비행체 또는 조종기로부터 방출되는 전파의 방향과 위치를 탐지하는 방향탐지 시스템으로 레이다를 사용하지 않는다. 무인비행체 혹은 레이다 등으로부터 RF 방출을 실시간으로 측정하며, 무인비행체를 제어하는 운용자를 추적하고, 무인비행체의 형태에 따라 수 km까지의 초광역 커버리지를 가진다. 방향 정밀도 2° 의 높은 추적 정확도를 가지며, 휴대용의 경우 1분 이내에 동작 준비가 가능하다. 360° 를 커버하며, 9kHz부터 20GHz까지의 주파수 영역을 감시한다. 스위칭 가능한 섹터증폭기를 사용함으로써 도심 환경에서도 고감도 탐지가 가능하다. Jammer 연동으로 무인비행체를 Fail-SafeMode로 착륙하거나 호버링 하도록 할 수 있으며, 재머가 높은 지향성을 가지므로 다른 무인비행체에 영향 없이 선별적인 제지가 가능하다[6], [(그림 6) 참조].

5. 프랑스: Cerbair사의 Anti-Drone Solution
위험도, 배치, 예산 등을 고려하여 몇 가지 전파와 광학 센서를 조합, 적절한 시스템을 구성하는 솔루션을 제공한다. RF/WiFi 센서를 활용해 신호의 방향을 탐지하여 거리 3km까지의 2.4/5GHz의 주파수를 검출하고 90° 수평각을 커버한다. 광학 센서의 경우 5M pixel의 고분해능, 거리 150m, 검출 각 90° 의 스펙을 가지고 있으며, 야간에는 IR 장비를 사용한다. 긴급 대응을 위한 운용자의 개입이 가능하도록 운용자 경보(시각, 청각, 문자 메시지 등)를 설정할 수 있다. 무인비행체에 의한 위협을 확인 시 안전한 장소로 사람을 대피, 집회를 중단, 사이트 탐색, 무인비행체의 가시선을 차단 등을 수행하며, 무인비행체를 강제로 착륙시키기 위해 재밍 또는 그물망을 던져 무인비행체를 포획하는 방식을 사용한다[7], [(그림 7) 참조].

6. 이스라엘: RADA 사의 RPS-42
우리나라에도 잘 알려진 이스라엘 RADA 사의 RPS-42는 기존의 군용 저고도 레이더에 비해 탐지 거리를 줄이는 대신 낮은 Cost, Size, Weight, and Power(C-SWAP)을 추구한 제품으로 펄스도플러 방식의 레이다로 Active Electronically Scanned Array(AESA) 안테나를 가지고 있어 Pan-Tilt 장비 없이 비회전식으로 빔 조향이 가능하다. 이동 편이성이 뛰어나고 우수한 가격대 성능비를 보여준다. RPS-42는 수평각 90° 를 담당하는 4개의 동일한 레이더로 구성되어 서로 교체가 가능하다[8], [(그림 8) 참조].

7. 미국
가. SpotterRF사의 Radar와 Black Sage Technology 사의 A2000
SpotterRF Radar사의 레이더와 Black Sage Technology 사의 영상 시스템을 통합한 무인비행체 감시스템으로 카메라 자동 추적, 스마트폰, 타블렛과의 연동이 가능하며 매초 GPS 좌표를 출력한다. 레이다는 최대 탐지 거리 1km, 무게 5 파운드, 크기 9.8” × 15” × 2.6” , 소모 전력 30Watts 의 규격을 가지고 있다[9], [(그림 9) 참조].

나. Harrier사의 DSR-200d
200Watt 반도체 S 또는 X 대역 펄스 도플러 레이다로 주파수 다이버시티 처리를 수행하며, 협력적 무인비행체 탐지를 위한 2차 감시 트랜스폰더 수신기(Mode-C와 ADS-B)를 사용한다. 새때를 자동으로 제거할 수 있는 신호처리 기능을 제공하며, 360° 전방위를 커버한다. 소형 무인비행체는 4.8km, 최대 탐지거리는 16km 이상이며 경보 영역의 반경을 설정할 수 있고, EO/IR 카메라, 음파탐지기와 연동한 표적 식별(Quadcopter, Copter, RCI 비행기 등) 기능이 있다[10], [(그림 10) 참조].
(그림 10)
Harrier 사의 DSR-200d

[출처] HARRIER, “DSR-200d.” http://detect-inc.cn/DeTect%20 -%20Security/TDS%20-%20HARRIER%20DSR%20200d%20150406US.pdf
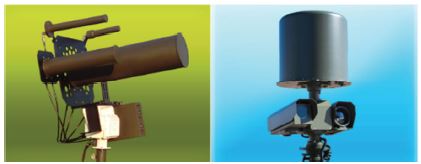
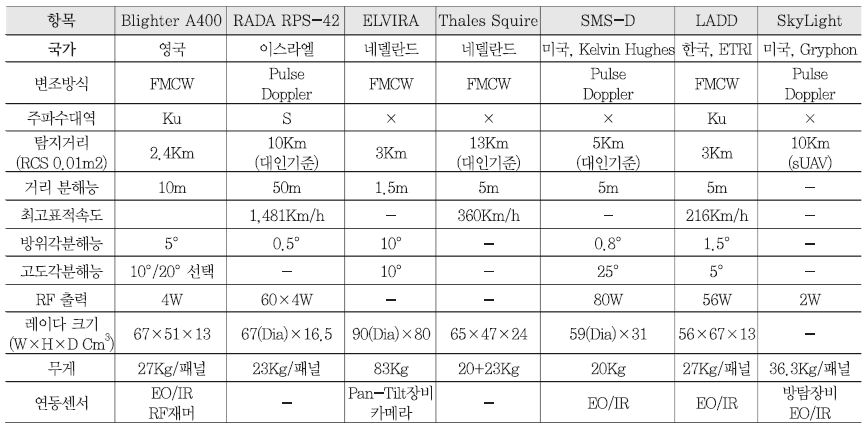
다. Gryphon Sensors 사의 SkyLightTM
1차 레이다[(그림 11a) 참조], 수동형 RF 방향탐지[(그림 11b) 참조], EO/IR 카메라[(그림 11c) 참조]와 ADS-B 데이터 수신 등 다양한 센서를 통합한 시스템으로, 1차 레이다 R1400은 소형, 저고도 비행 표적을 탐지하기 위한 특수 목적으로 설계된 3차원 AESA 대공 감시 레이다이며, 펄스 도플러 방식을 사용하고, 주파수 대역은 9.3~9.8GHz, 대역폭 5MHz, 수평 360° , 수직 90° 의 반구 커버리지 내에서 정확한 표적의 위치, 속도를 제공한다. 소형 무인비행체를 10km, 일반 항공기를 27km까지 탐지한다. 레이더 패널 무게는 36.3kg, 삼각대와 포지셔너를 포함하여 90.7kg이다. 스펙트럼 센서 S2는 2.4/5.8GHz 대역 신호의 형태를 검출하고 분류하기 위하여 광범위한 드론 제어 신호 자료(Library)를 사용하여 반경 5km 이내의 상용 무인비행체 제어 신호를 정확하게 자동으로 검출한다. 무게는 패널당 11kg으로 4개 패널과 삼각대를 포함하여 62kg이다. 카메라는 다양한 고분해능, 명령에 의한 회전 제어, 광학 추적 기능을 사용하여 표적을 관찰하고 시각적 식별 및 광학 추적으로 조류, 일반 비행물체 등 비협력적 표적의 구별에 사용한다. 3km의 거리까지 비행 표적을 관찰하기 위해 360° 수평각 및 180° 수직각을 회전하는 열상과 광학 렌즈를 사용한다[11].

라. Kelvin Hughes사의 SMS-D
Kelvin Hughes사의 Single Master Solution(SMS)는 SharpEyeTM 의 레이다와 광학/열상 장치 CxEyeTM를 조합하여 주요 장소의 주변과 국경 등을 360° 전방위를 감시한다. 이동체에 탑재가 가능하며, SharpEyeTM X-대역 레이다는 표적의 방위각, 거리, 고도 및 속도 데이터를 지속적으로 갱신하고 빠른 대응을 위해 비디오 추적시스템을 사용하여 표적을 자동으로 식별하며, 무인비행체를 1.5km까지 검출한다. 고성능, 경량, 이동/고정 자족형 레이다이며 무게는 20kg 이하이다. 레이돔내에는 360° 를 커버하는 안테나, 저전력 제어 반도체 X-대역 송수신기와 GPS가 내장되어 있고, 극저온, 고온 다습한 조건에서 동작 가능한 IP67 환경 규격을 충족한다[12], [(그림 12) 참조].
(그림 12)
SharpEyeTM 레이다와 CxEyeTM 카메라

[출처] https://www.kelvinhughes.com/news/274-new-drone-detection-radar
마. DMT Security Radar Solutions사의 c-UAS
DMT사와 MOOG사가 협력하여 DMT의 레이다 Black Marlin과 MOOG의 주·야간 영상 카메라 Mercury S3-550을 사용해 무인비행체를 탐지, 추적, 무력화시키는 시스템을 개발하였다. DMT 원격 클라이언트 소프트웨어는 24개까지의 레이다와 수많은 카메라를 통합, 제어한다. 음향 검출 시스템, RF/GPS 재머, 드론과 핸드헬드 조정기 사이의 모든 무선통신원의 위치를 탐지하는 RF 감시 시스템, 짐벌, 자동식별 시스템과 Blue Force Tracking(BFT), 명령 스테이션을 추가 옵션으로 제공한다. Black Marin 레이다가 6km까지 장거리에서 드론을 탐지하면, DMT 원격 클라이언트가 MOOG 카메라를 지정하고, MOOG는 2km의 거리에서 무인비행체를 추적하고 약 1~2km 사이에서 제어신호와 GPS 수신기를 재밍함으로써 무인비행체를 강제 착륙시킨다. Black Marin 레이다는 펄스 도플러 방식이며, X-대역인 9.25GHz로 송신, 100~800Watts 범위에서 출력을 조정할 수 있으며, 계기상 거리는 49km이나 360° 를 회전하는 경우 도플러 처리 부하와 실효 거리를 고려하여 15km로 설정되어 있다. -35° ~+90° 범위에서 지향각 조절이 가능하다[13], [(그림 13) 참조].

바. 기타
CASI사는 SkyTracker 시스템으로 FAA의 ‘Path-finder Program’에 참여하고 있으나 구체적인 사양은 확인하기 어려운 상태이다.
Liteye Systems는 LITEYE라는 이름의 제품으로 FAA의 ‘Pathfinder Program’에 참여하고 있으며, LITEYE는 영국 Blighter 감시레이더와 동일한 제품인 것으로 추정된다[14].
Sensofusion사는 AIRFENCE라는 제품으로 FAA의 ‘Pathfinder Program’에 참여하고 있다. 실시간 조기 위험 경보 기능 설정 가능하며, 무인기 검출 시 운용자에게 휴대폰 알림 기능을 제공한다. 단일 AIRDEFENCE 유닛으로 최대 10km까지 무인기를 탐색하고, 유닛을 추가함으로써 수평 커버리지 증대가 가능하다[15].
Dedrone사는 RF 센서와 광학장비, 단거리 레이다, 전파 교란기로 시스템을 구성하였다. RF 센서의 경우 RC 대역을 탐지하며, 광학장비는 상황인지, 표적인식, 법적 증거 수집에 이용된다. 단거리 레이다의 경우 소형 무인비행체를 50m에서 탐지할 수 있다. 전파 교란기의 경우 GPS, GLONASS, Galileo, 2.4/5.8GHz 대역을 모두 교란시킨다[16].
8. 대한민국
가. 한국전자통신연구원의 LADD 시스템
한국전자통신연구원에서는 2017년 4월부터 경찰청을 수요부처로 ‘무인비행장치의 불법 비행 감지를 위한 EO/IR 연동 레이다 개발 및 실증시험’ 과제를 수행하고 있다. 개발중인 Low Altitude Drone Detection(LADD) 시스템은 레이다를 활용해 위협체의 출현을 탐지한다. 레이다에서 위협체를 탐지 시, 탐지된 표적의 위치를 EO/IR 영상 장비로 전달하고, EO/IR 영상 장비는 위협체를 추적 및 무인비행체 여부를 식별한다. LADD시스템에서 확인된 무인비행체의 위치 정보는 무인비행체 무력화 대응체계로 전달된다[(그림 14) 참조].

Ⅳ. 안티 드론 기술 발전 방향
1. 무력화 기술
현재 안티 드론 시스템들이 가장 확실한 무력화 수단으로 활용하는 장비는 RC 대역과 GNSS 대역의 재머이다. 무인비행체 기술이 발전하면서 조종자의 개입이나 GNSS 신호 수신 없이 탑재된 관성 항법 장치와 영상 센서, 기압계 등을 활용하여 목적지까지 비행시키는 기술들이 종종 소개되고 있다. 무인비행체의 기술 발전을 고려할 때 재머를 활용한 무력화는 확실한 대응 수단이 될 수 없다. 또한, 포획 그물망은 사용할 수 있는 거리가 매우 짧고, 다수의 무인비행체를 활용한 군집비행에 대응이 어렵기 때문에, 레이저빔을 활용한 요격기술 등이 대안으로 개발되고 있다.
2. 탐지 기술
대체로 안티 드론 시스템은 기본적으로 전천후 활용이 가능한 레이다를 기반으로 영상 센서, RF 탐지 센서 등이 보조 수단으로 활용하고 있다. 레이다 장비는 민간에서 도입하기에 가격이 매우 높기 때문에, 장비의 가격을 낮추고, 탐지 성능 요구조건을 완화하는 방향으로 개발이 진행되고 있다. 야간용 영상 획득을 위한 열상 장비 또한 도입 비용이 매우 높아 대체할 수 있는 수단을 찾고 있다.
Ⅴ. 맺음말
위에서 살펴본 바와 같이 전세계적으로 무인비행체의 기술이 발전하고 보급이 활성화됨에 따라 이를 활용한 테러나 불법행위에 대비하기 위한 다양한 기술들 또한 개발되고 있음을 알 수 있다. 안티 드론 기술의 활용을 위해서는 레이다와 같은 능동형 장비들이 사용할 수 있는 민간용 레이다 주파수 할당이 필요하며, 무인비행체의 무력화에 따른 추락 시 발생할 수 있는 2차 피해에 대한 보상, 비행금지구역 비행 시 처벌 등 제도적 장치가 마련되어야 한다. 안티 드론 기술은 개인적 활용성보다는 공공성이 매우 높기 때문에 기술개발 로드맵에 따른 정부 차원의 제도적 지원(주파수 할당, 전자파 인체 보호 기준 마련, 무인비행체 요격 기준 등)이 수반되어야 할 것이다.
약어 정리
AVC
Advanced Video Coding
AESA
Active Electronically Scanned Array
AUDS
Anti-UAV Defence System
BFT
Blue Force Tracking
C-SWAP
Cost, Size, Weight, and Power
EO
Electro Optic
GLONASS
Global Navigation Satellite System
GNSS
Global Navigation Satellite System
GPS
Global Positioning System
GPU
Graphic Processing Unit
IR
Infrared
ISM
Industrial Scientic and Medical
LADD
Low Altitude Drone Detection
RC
Radio Control
RCS
Radar Cross Section
RF
Radio Frequency
SMS
Single Master Solution


(그림 3)
DroneRager(전파교란기)와 Radar and Camera System
[출처] DroneRanger. http://www.mgteurope.com/mgt-droneranger-anti-drone-uav-detection-system/
(그림 4)
Blighter사의 AUDS 시스템

[출처] AUDS. http://www.blighter.com/products/auds-anti-uav-defence-system.html.

(그림 6)
Aaronia사의 Advanced Automatic RF Tracking and Observation Solution

[출처] AARTOS. http://www.aaronia.com/products/solutions/Aaronia-Drone-Detection-System
(그림 7)
Cerbair사의 Anti-Drone Solution

[출처] Cerbair, “Anti-Drone Solution.” https://www.cerbair.com/2017/solution.php
(그림 8)
RADA 사의 RPS-42

[출처] RADA, “RPS-42.” http://www.radartutorial.eu/19.kartei/05.perimeter/karte007.en.html

(그림 10)
Harrier 사의 DSR-200d

[출처] HARRIER, “DSR-200d.” http://detect-inc.cn/DeTect%20 -%20Security/TDS%20-%20HARRIER%20DSR%20200d%20150406US.pdf




- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.