운전자 맞춤형 첨단 운전자 보조 시스템 기술 동향
Trends on Personalization in Advanced Driver Assistance Systems
- 저자
-
김도현주력산업IT융합연구그룹 dohyun@etri.re.kr 장병태주력산업IT융합연구그룹 jbt@etri.re.kr 신성웅지능로보틱스연구본부 sshin@etri.re.kr
- 권호
- 33권 4호 (통권 172)
- 논문구분
- 일반논문
- 페이지
- 61-69
- 발행일자
- 2018.08.01
- DOI
- 10.22648/ETRI.2018.J.330407
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- Driver-specific technology in the automotive field has been commercialized for vehicle accessories, driver memory sheets, and side mirrors. In recent years, the demand for customized technology has expanded to include the user interface of an infotainment system (Infotainment System) and advanced driver support system (Advanced Driver Assistance System), and customized technologies for drivers have been studied. Therefore, this article describes the driver-tailored technology trends being studied in these fields, and examines the major research issues related to future driver-tailored technologies in the automotive field.
Share
Ⅰ. 개요
자동차 분야에서의 운전자 맞춤형(Personalization) 기술은 오래 전부터 연구 개발되어 온 분야로 주로 색상, 차량 내 액세서리, 운전자 메모리 시트, 사이드 미러 등에 적용되어 제품화되었다. 최근에는 운전자 맞춤형 기술 수요의 증대로 차량 내 인포테인먼트 시스템(Infotainment System)의 사용자 인터페이스 기술과 첨단 운전자 지원 시스템(ADAS: Advanced Driver Assistance System)에서 운전자 맞춤형 기술 연구들이 진행되고 있다. 본 장에서는 간략하게 이들 분야에 대한 운전자 맞춤형 기술 동향을 살펴보고자 한다.
인포테인먼트 시스템에서의 운전자 맞춤형 기술은 경로 계획/안내 시스템(Driving Route Recommendation System), 상황 인식 시스템(Situation Awareness Sys-tem) 등이 있다. 경로 계획/안내 시스템은 운전자의 과거 운행 로그실시간 교통 흐름 정보, 운전자 선호도 등을 토대로 경로를 생성하여 운전자에게 추천하는 것이다[1], [2]. (그림 1)은 운전자 맞춤형 경로 계획/안내 시스템의 예를 보여 주고 있다.

인포테인먼트 시스템에서의 운전자 맞춤형 기술의 다른 예는 상황 인식 시스템이다[3]-[5]. 대화형 운전자 인터페이스는 운전자와의 인터랙션을 통해 운전자의 상황을 관찰하여 운전자의 선호도에 기반한 인터페이스를 제공한다. 또한 운전자 부하 경감을 위해 운전자 맞춤형 오디오 정보를 추천하고 운전에게 자동적으로 예측 제공하는 기능도 제공한다. (그림 2)는 인포테인먼트 시스템에서의 운전자 맞춤형 상황 인식 시스템의 예를 보여주고 있다.
첨단 운전자 지원 시스템에서의 운전자 맞춤형 기술은 최근에 연구 개발되고 있는 분야이다. 이 분야는 예전에는 기능 및 안전 중심의 기술개발이 주로 진행되었으나 최근에 운전자의 운전 스타일이나 선호도 등을 반영한 연구들이 수행되고 있다. 이 분야의 운전자 맞춤형 기술은 II장에서 자세히 다루도록 한다.
Ⅱ. 운전자 맞춤형 첨단 운전자 지원 시스템 기술 동향
첨단 운전자 지원 시스템은 운전 중 발생할 수 있는 수많은 상황 가운데 일부를 차량 스스로 인지하고 상황을 판단, 기계장치를 제어하는 기술이다. 복잡한 차량 제어 프로세스에서 운전자를 돕고 보완하며, 궁극으로는 자율주행 기술을 완성하기 위해 개발됐다. 첨단 운전자 지원 시스템은 충돌 위험시 운전자가 제동장치를 밟지 않아도 스스로 속도를 줄이거나 멈추는 자동 긴급제동시스템, 차선 이탈 시 주행 방향을 조절해 차선을 유지하는 주행 조향 보조 시스템, 사전에 정해 놓은 속도로 달리면서도 앞차와 간격을 알아서 유지하는 스마트 크루즈 컨트롤, 사각지대 충돌 위험을 감지해 안전한 차로 변경을 돕는 후측방 충돌 회피지원 시스템, 차량 주변 상황을 시각적으로 보여주는 어라운드 뷰 모니터링 시스템 등을 포함한다.
첨단 운전자 지원 시스템은 기능 및 안전 관점에서 지속적으로 연구 개발되어 다양한 차종에 탑재되어 운용되고 있다, 최근에 이러한 기능 및 안전 관점에서의 첨단 운전자 지원 시스템에 운전자 맞춤형(또는 개인화) 관점으로 해당 시스템에 대한 연구 개발이 지속적으로 수행되고 있다. 운전자 맞춤형이라는 개념은 운전자와 자동차의 의사소통에 있어서 어떻게 하면 운전자가 학습하지 않고 자동차를 다룰 수 있는 지와 자동차가 전달하는 정보를 운전자가 직관적으로 받아들일 수 있는지에 관한 것이다.
본 장에서는 첨단 운전자 지원 시스템에서의 운전자 맞춤형 기술 개발 동향을 살펴본다. 첨단 운전자 지원 시스템 중에서 스마트 크루즈 컨트롤 시스템(Adaptive Cruise Control System)과 전방 충돌 경고 시스템(Forward Collision Warning System), 그리고 차선 유지/변경 보조시스템(Lane Assistance System)을 중심으로 논하고자 한다. 또한 운전자 맞춤형에 대한 기본적인 프로세스 정의와 향후 운전자 맞춤형 관점에서 중요하게 논의될 이슈들에 대하여 소개하고자 한다.
1. 스마트 크루즈 컨트롤 시스템
스마트 크루즈 컨트롤이란 일정 속도까지 차량을 가속한 이후 작동 시 가속 페달을 밟지 않아도 지정된 속도로 차를 주행할 수 있는 기능이다. 미국 대륙이나 중국 대륙이나 나라 간의 이동이 잦은 유럽 대륙의 경우는 크루즈 컨트롤이 거의 필수이나, 국내에서는 80~90년대 중형이나 대형차에 장착되다가 필요성을 못 느껴 사라지고 최근에 들어와서 대형차를 시작으로 경차에까지도 탑재되고 있는 기능이다. 현재의 운전자 맞춤형 관점에서의 스마트 크루즈 컨트롤 시스템의 경우 정속 속도와 미리 정의된 타임 갭(Time Gap)을 운전자가 선택할 수 있게 되어 있다.
운전자 맞춤형 관점에서의 스마트 크루즈 컨트롤 시스템은 개인화 기반과 그룹 기반으로 나뉘어질 수 있다. 그룹 기반이라 함은 스마트 크루즈 컨트롤 시스템의 주행 전략을 미리 정의된 일반적인 운전 스타일(Driving Style)을 반영하여 운전자는 이 운전 스타일 중에 하나를 선택하게 하는 것이다, 개인화 기반은 운전자 스스로의 운전 스타일을 반영할 수 있도록 주행 전략을 제공하는 것이다.
그룹 기반 운행 전략을 기반으로 하는 스마트 크루즈 컨트롤 시스템의 대표적인 예는 아래 (그림 3)과 같다. 이 방법은 시뮬레이터 및 실차 실험에 참여한 운전자들을 대상으로 스마트 크루즈 컨트롤 시스템을 사용할 때 선호하는 운전 스타일 이나 타임 갭에 대한 정형화된 수식을 도출하여 이를 시스템에 적용한 것이다[6], [7].
개인화 기반 스마트 크루즈 컨트롤 시스템의 운행 전략은 실시간으로 운전자 개인의 운전 스타일을 관측하여 이를 반영하는 것이다, 예를 들어 운전자의 운전 스타일에서 앞차와의 거리 간격 등을 모델링 한 Linear Car Following Model을 만들어 이를 반영하는 것이다[8]-[12].
개인화 기반 스마트 크루즈 컨트롤 시스템의 운행 전략의 또 다른 예는 예측 모델을 적용하여 운전자의 운전 스타일을 모방하는 운전자 운행 모델을 구축하는 것이다. 구체적으로 살펴보면 운전자가 앞차를 따라 운행하는 운전 행위를 모델링 한 Hidden Markov Model과 운전자의 최근의 가속 행위를 예측한 Gaussian Mixture Regression을 적용한 방법이다[10].
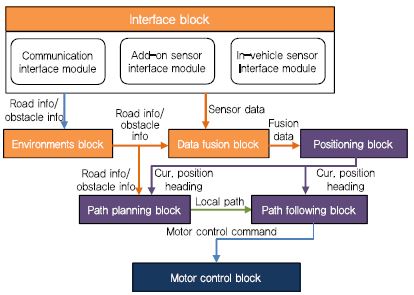
마지막으로 살펴볼 방법은 타임 갭과 충돌 예측 시간, 브레이크 작동 패턴 들을 기반으로 Linear Driver Model을 구축하여 운전자의 운행 전략을 반영하는 방법이다, (그림 4)는 개인화 기반 운행 전략 예를 보여주고 있다.
2. 전방 충돌 경고 시스템
전방 충돌 경고 시스템은 앞서 주행하고 있는 차량의상대적인 저속 이나 정지 등으로 충돌할 수 있는 경우에 대해 경고를 주는 것으로 본 시스템에서의 운전자 맞춤형의 목적은 해당 시스템의 오 경고(False Alarm) 를 줄이고 앞차와의 충돌의 방지하기 위한 경고를 운전자가 충분히 회피 운전 행위를 할 수 있도록 미리 경고를 보내는 것이다[14]-[18].
구체적으로는 운전자에게 전방 충돌 경고를 주는 시점을 결정하기 위해 운전자의 위험 상황 확률 모델을 기반으로 하는 통계학적 운전 스타일 모델링 기법이 있으며, 또 다른 예로는 운전자 개개인의 운전 스타일과 선호도를 기반으로 운전 스타일의 변동이 발생할 경우 이를 반영하여 실시간으로 운전자 위험 경고를 제공하는 것이 있다. 이 방법은 기존의 정형화된 위험 상황 확률 모델을 개선하여 실시간으로 운전자의 운전 스타일을 반영한 동적 위험 상황 모델을 지원하고 있다. (그림 5)는 개인화 기반 전방 충돌 경고 시스템 예를 보여주고 있다.
3. 차선 유지/변경 보조 시스템
운전자 맞춤형 차선 유지/변경 시스템은 운전자가 차선 유지/변경 시 운전자의 운전 스타일을 반영하여 차선 변경이 안전한지에 대한 정보를 제공하는 것이다. 차선 변경 시 운전자는 운전 환경에서 같은 차선의 전방 차량, 변경 차선의 전방 및 후방 차량 등 3대의 차량을 주의 깊게 살펴봐야 한다. 차선 변경 시 중요한 요소는 Gap Acceptance 로 본 방법은 이 Gap Acceptance를 운전자 운전 스타일과 앞에서 기술한 3대의 차량의 주행 궤적을 예측하여 운전자 맞춤형으로 제공하는 것이다. 이 방법은 운전자의 운전 스타일을 모델링 하기 위해 Lane Change Kinematic Model과 Gaussian Mixture Model을 사용한다. 이 모델들은 예측 정확도를 높이기 위해 실시간으로 연속적으로 운전자의 운전 스타일을 업데이트한다[11], [19].
Ⅲ. 운전자 맞춤형 연구 이슈
지금까지 자동차 분야에서 연구 개발되고 있는 운전자 맞춤형 기술에 대하여 살펴보았다. 구체적으로는 차량 내 인포테인먼트 시스템(Infotainment System)의 사용자 인터페이스 기술과 첨단 운전자 지원 시스템(Advanced Driver Assistance System)에서 운전자 맞춤형 기술 연구들에 대해 논의하였다. 본 장에서는 자동차 분야에서의 운전자 맞춤형 연구 이슈에 대하여 살펴본다.
1. 자율주행 환경에서의 운전자 맞춤형 기술
운전자 맞춤형의 일반적인 의미는 운전 수행 시 운전자가 최대한 편안하게 자신이 운전 스타일을 반영한 운전 환경을 제공하는 것이다. 하지만 최근에는 자율주행 환경에서의 운전자 맞춤형 기술 개발에 대한 필요성이 높아지고 있으며 이에 대한 연구가 활발히 진행되고 있으며 주요 연구내용은 아래와 같다[20]-[23].
첫 번째는 자율 주행 환경에서의 운전자 운전 스타일선호도 분석 기술이다. 운전자의 매뉴얼 운전 스타일과 자율주행 운전 환경에서의 선호도 사이의 관계를 운전자 군별로 분석하는 것이다. 주로 노령 운전자와 젊은 운전자, 공격 성향 운전자와 방어 성향 운전자 등으로 구분하여 자율 주행 환경에서의 운전 선호도를 분석하는 것이다. 선행 연구의 결과, 젊은 운전자는 정형화된 일반적인 운전 스타일이 자신만의 운전 스타일은 반영한 운전자 맞춤형 자율 주행을 선호하고 있으며 노령 운전자의 경우 자신이 운전 스타일이 반영된 운전자 맞춤형 자율 주행보다는 정형화된 일반적인 자율 주행을 선호하는 것으로 나타나고 있다. 공격 성향 운전자와 방어 성향 운전자의 경우 두 그룹 모두 자율 주행 환경에서의 자율 주행을 선호하는 것으로 연구되고 있다.
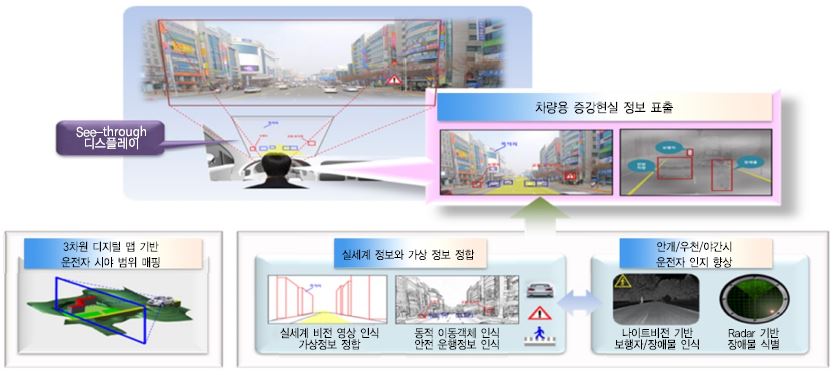
하지만, 자율 주행 환경에서의 운전자 맞춤형 기술에 대한 연구는 아직 초보단계에 있다. 현재는 운전자 운전 환경과 자율 주행 환경과의 관계를 분석하는 단계이어서 향후 자율 주행 환경에서의 운전자 맞춤형을 지원하기 위한 운전자 맞춤형 자율 주행 모델 등에 대한 연구가 지속적으로 진행되어야 한다. (그림 6)은 운전자 맞춤형 자율 주차 시스템 예를 보여주고 있다.

2. 지속적으로 예측가능한 운전자 맞춤형 기술
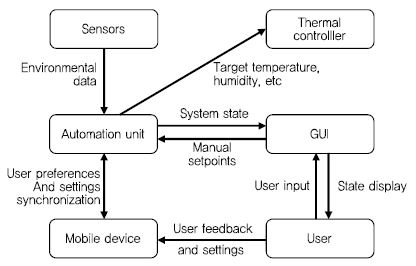
일반적으로 운전자 맞춤형 시스템은 운전자의 운전 스타일을 추론하여 이를 실제 차량 내 시스템에 반영하는 것으로, 운전 스타일을 추론하는 과정이 지속적인 반복 분석을 통한 업데이트 과정이 필요하다. 즉 운전자 운전 스타일은 동일 환경에서 운전자의 상태에 따라 다르게 나타나며 또한 다양한 운전 환경에서는 운전 스타일이 동일하게 나타나지 않는다. 이에 운전자의 운전 스타일을 지속적으로 관찰하여 운전자의 운전 스타일을 정확하게 분석하는 기술이 필요하다. 대부분의 운전 스타일 분석에서는 Linear Process 를 적용하여 분석하게 되는데 이 방법으로는 다양한 운전 스타일 분석이 어렵게 된다. 이를 개선하기 위해 Cyclic Iterative Process, On-Demand Re-Calibration 등과 같은 다양한 방법론이 연구되고 있다[9], [11], [14]. (그림 7)은 운전자 Feedback 기반 운전자 맞춤형 UI/UX 시스템 예를 보여주고 있다.

3. 운전자 맞춤형 인터페이스
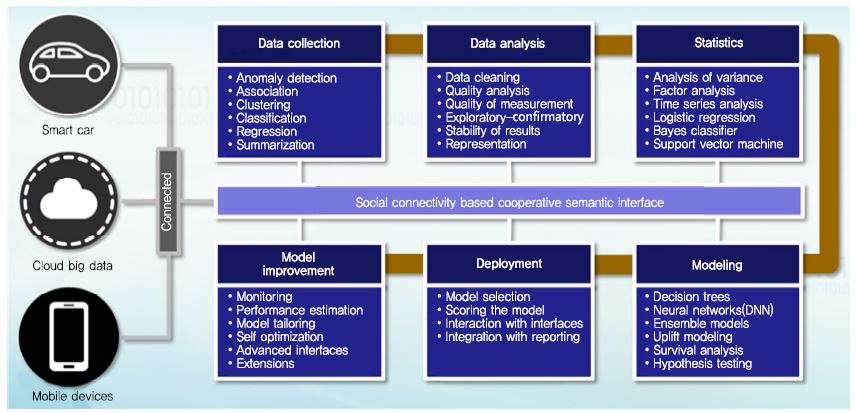
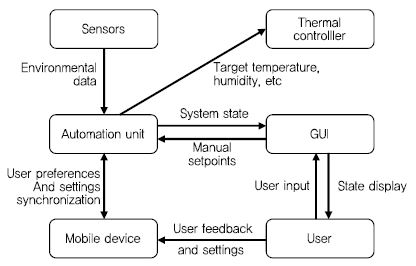
최근 자동차와 운전자의 인터페이스와 관련하여 운전자가 학습하지 않고 자동차의 주요 기능을 수행할 수 있는지, 차량 내 인포테인먼트 시스템과 첨단 운전자 지원 시스템에서 전달하는 주행 관련 정보를 운전자가 어떻게 직관적으로 받아들일 수 있는지를 지속적으로 연구하고 있다. 이는 주행 중 운전자가 안전하게 정보를 처리할 수 있는 시점을 예측하고, 운전자가 조작하기 전에 필요한 기능과 서비스를 알아서 제공하고, 상황에 맞게 각종 차량 내 편의장치가 준비되도록 하는 기술들을 의미하는 것으로 운전자에게 제공되는 운행 관련 정보를 운전자가 친숙한 형태로 제공하는 것에서부터 운전 상황 별로 운전자에게 필요할 만한 정보를 제공하는 것과, 운전자 대신 운전 상황을 분석하여 판단하는 것까지를 포함하여 인공지능이나 머신러닝을 활용하는 기술들이 연구되고 있다[24]. (그림 8)은 인공지능 기술을 적용한 자동차 내 맞춤형 공조 시스템의 예를 보여주고 있다.
4. 운전자 운전 행동 모델링
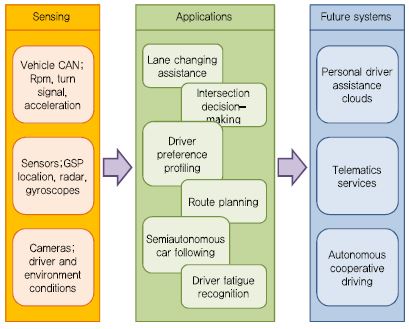
운전자 운전 행동 모델링에는 운전자 의도, 차량 동역학 등이 포함된다. 따라서 완전한 운전자 운전 행동 모델링을 위한 단일 모델링 프레임 워크를 개발하는 것은 어렵습니다. 그러나 전통적으로 전형적인 운전자 운전 행동 모델링 프레임 워크에는 다양한 센서 및 차량 컨트롤러의 입력, 필요한 경우 데이터를 필터링하는 전처리 알고리즘, 특정 작업의 핵심 예측 모델 및 피드백이 포함된다. 이를 토대로 감지 단계, 추론 단계 및 응용 프로그램 계층을 주로 포함하고 있다. 감지 단계에는 차량, 드라이버 및 시스템에서 다양한 형태의 데이터 수집이 포함되며 일반적으로 응용 프로그램을 염두에 두고 추론 엔진에 공급된다. 개별 애플리케이션에 대한 현재 연구가 아직 성숙되지는 않았지만 궁극적인 목표는 운전자를 위해 여러 개인화 된 서비스를 통합하는 지원 시스템을 개발하는 것이다. 이를 위해서는 높은 수준의 데이터 추상화와 여러 리소스의 처리가 필요하다.
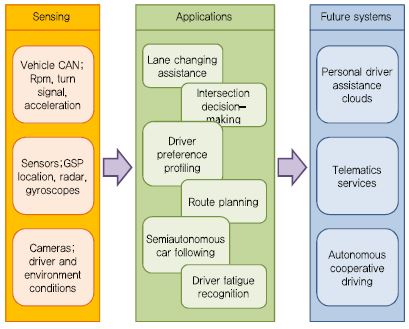
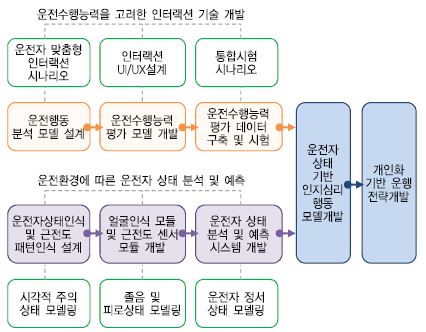
보다 개인화되고 일반적인 모델을 개발하기 위해서는 날씨와 조명 등과 같은 개인 운전 행동 동기와 선호를 통합하고 덜 보편적이고 복잡한 운전 행동을 분석하는 것이 주요 내용이다[25]. (그림 9)는 운전자 운전 행동 모델링의 예를 보여주고 있다.
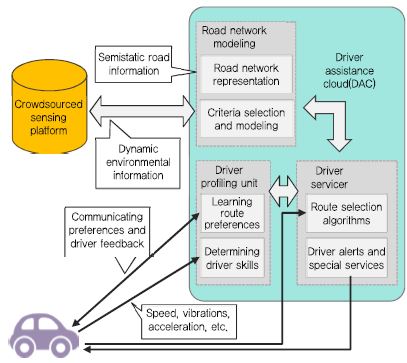
5. 클라우드기반 운전자 맞춤형 지원 기술
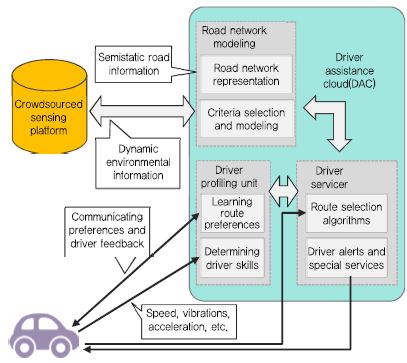
차량 내 첨단 운전자 지원 시스템 기능에 대해 여러 가지 개발이 독립적으로 수행되었지만 현재의 감지 기능, 운전자 행동 모델 및 통신을 클라우드에 통합하는 프레임 워크에 대한 연구는 제한적으로 수행되어 왔다. 이러한 클라우드 기반 운전자 맞춤형 지원 기술은 (그림 10)와 같이 새로운 개인화 된 운전자 맞춤형 지원 서비스를 제공 할 수 있다. 한가지 예로 날씨 정보, 건설, 보행자 유행, 버스 정류장 및 도로 공사 둥과 같은 환경 및 도로 속성을 통합하기 위해 도로 교통 정보 저장소를 만들고 운전자 운전 스타일을 모델링 한 운전자 프로파일을 기반으로 효율적인 경로 선택 알고리즘을 설계 할 수 있다. 여기에는 운전자가 취한 경로와 각기 다른 도로 유형의 운전 환경 수준을 모니터링 하는 데 기반한 최초 학습 경로 환경 설정이 포함될 수 있다. 그런 다음 여러 가지 요인에 대한 의사 결정 기법을 적용하여 다른 운전자에게 가장 적합한 경로를 결정할 수 있다[25].
Ⅳ. 결론
본고에서는 운전자 맞춤형 기술 수요의 증대로 최근에 많은 연구가 수행되고 있는 는 차량 내 인포테인먼트 시스템(Infotainment System)의 사용자 인터페이스와 첨단 운전자 지원 시스템(ADAS: Advanced Driver Assistance System)에서의 운전자 맞춤형 기술 동향에 대하여 살펴보았다. 구체적으로는 운전자 맞춤형 인포테인먼트 시스템에서 경로 계획/안내 시스템과 상황 인식 시스템에 대하여 기술하였다. 첨단 운전자 지원 시스템에서의 운전자 맞춤형 기술로 스마트 크루즈 컨트롤 시스템, 전방 충돌 경고 시스템, 그리고 차선 유지/변경 보조 시스템을 구체적으로 살펴보았다. 마지막으로 향후 운전자 맞춤형 연구 이슈로 자율주행 환경에서의 운전자 맞춤형 기술과 지속적으로 예측 가능한 운전자 맞춤형 기술, 운전자 맞춤형 인터페이스, 운전자 운전 행동 모델링, 그리고 클라우드 기반 운전자 맞춤형 지원 기술에 대하여 논의하였다.
약어 정리
J. Letchner, J. Krumm, and E. Horvitz, “Trip Router with Individualized Preferences (Trip): Incorporating Personali-zation into Route Planning,” in Proc. National Conf. Artif. Intell., Boston, MA, USA, July 16-20, 2006, pp. 1795-1800.
J. Dai, B. Yang, C. Guox, and Z. Ding, “Personalized Route Recommendation using Big Trajectory Data,” IEEE 31st Int. Conf. Data Eng. (ICDE), Seoul, Rep. of Korea, Apr. 13-17, 2015, pp. 543-554.
S.R. Garzon, “Situation-Aware Personalization of Auto-motive User Interfaces,” in Adjunct Proc. Int. Conf. Autom. User Interfaces Interactive Veh. Applicat., Portsmouth, NH, USA, Oct. 17-19, 2012, pp. 15-16.
J.I. A´rnason, J. Jepsen, A. Koudal, M.R. Schmidt, and S. Serafin, “Volvo Intelligent News: A Context Aware Multi Modal Proactive Recommender System for In-vehicle Use,” Pervasive Mobile Comput., vol. 14, Oct. 2014, pp. 95–111.
B.A. Harsham et al., “Driver Prediction to Improve Interaction with In-vehicle HMI,” in Workshop on DSP for In-Vehicle Systems and Safety, Oct. 2015. [Online]. Available: http://www.merl.com/publications/TR2015-120.
A. Rosenfeld, Z. Bareket, C.V. Goldman, D.J. LeBlanc, and O. Tsimhoni, “Learning Drivers’ Behavior to Improve Daptive Cruise Control,” J. Intell. Transportation. Syst., vol. 19, no. 1, 2015, pp. 18–31.
M. Canale, S. Malan, and V. Murdocco, “Personalization of ACC Stop and Go Task Based on Human Driver Behaviour Analysis,” IFAC Proc. vol. 35, no. 1, 2002, pp. 357–362.
G.N. Bifulco, F. Simonelli, and R. Di Pace, “Experiments Toward an Human-Like Adaptive Cruise Control,” in IEEE Intell. Veh. Symp., Eindhoven, Netherlands, June 4-6, 2008, pp. 919–924.
G.N. Bifulco, L. Pariota, F. Simonelli, and R. Di Pace, “Development and Testing of a Fully Adaptive Cruise Control System,” Trans. Res. Part C: Emerging Technol., vol. 29, Apr. 2013, pp. 156–170.
S. Lef`evre, A. Carvalho, Y. Gao, H.E. Tseng, and F. Borrelli, “Driver Models for Personalised Driving Assistance,” Veh. Syst. Dynamics, vol. 53, no. 12, 2015, pp. 1705–1720.
S. Lef`evre, A. Carvalho, and F. Borrelli, “A Learning-Based Framework for Velocity Control in Autonomous Driving,” IEEE Trans. Autom. Sci. Eng., vol. 13, no. 1, 2016, pp. 32–42.
J. Wang, L. Zhang, D. Zhang, and K. Li, “An Adaptive Longitudinal Driving Assistance System Based on Driver Characteristics,” IEEE Trans. Intell. Trans. Syst., vol. 14, no. 1, Mar. 2013, pp. 1–12.
F. Muehlfeld, I. Doric, R. Ertlmeier, and T. Brandmeier, “Statistical Behavior Modeling for Driver-Adaptive Precrash Systems,” IEEE Trans. Intell. Transp. Syst., vol. 14, no. 4, 2013, pp. 1764–1772.
J.P. Feraric, M. Kopf, and R. Onken, “Statistical Versus Neural Net Approach for Driver Behavior Description and Adaptive Warning,” in Proc. Eur. Annu. Conf. Human Decision Making Manual Contr., 1992.
R. Onken and J.P. Feraric, “Adaptation to the Driver as Part of a Driver Monitoring and Warning System,” Accident Anal. Prevention, vol. 29, no. 4, 1997, pp. 507–513.
J. Wang, C. Yu, S.E. Li, and L. Wang, “A Forward Collision Warning Algorithm with Adaptation to Driver Behaviors,” IEEE Trans. Intell. Transp. Syst., vol. 17, no. 4, Apr. 2016, pp. 1157–1167.
V. Butakov and P. Ioannou, “Personalized Driver/Vehicle Lane Change Models for ADAS,” IEEE Trans. Veh. Technol., vol. 64, no. 10, Oct. 2015, pp. 4422–4431.
S. Scherer, A. Dettmann, F. Hartwich, T. Pech, A.C. Bullinger, J.F. Krems, and G. Wanielik, “How the Driver Wants to be Driven – Modelling Driving Styles in Highly Automated Driving,” in Automatisiertes Fahren - Hype oder mehr?, Tagungsband 7. Tagung Fahrerassistenz, vol. 7, 2015, pp. 2015–2026.
F. Hartwich, M. Beggiato, A. Dettmann, and J. Krems, “Drive me Comfortable. Customized Automated Driving Styles for Younger and Older Drivers,” in 8. VDI-Tagung Der Fahrer im 21. Jahrhundert. VDI-Verlag, 2015, pp. 271–283.
N.M. Yusof, J. Karjanto, J. Terken, F. Delbressine, M. Z. Hassan, and M. Rauterberg, “The Exploration of Autonomous Vehicle Driving Styles: Preferred Longitudinal, Lateral, and Vertical Accelerations,” in Proc. Int. Conf. Autom. User Interfaces Interactive Veh. Applicat. (Automotive’UI 16), Ann Arbor, MI, USA, Oct. 24-26, 2016, pp. 245–252.
C. Basu, Q. Yang, D. Hungerman, M. Singhal, and A. D. Dragan, “Do You Want Your Autonomous Car to Drive Like You?” in Proc. ACM/IEEE Int. Conf. Human-Robot Interaction, Vienna, Austria, Mar. 6–9, 2017, pp. 417–425.
M. Stärk, D. Backes, and C. Kehl, “A Supervised Learning Concept for Reducing User Interaction in Passenger Cars,” Submitted on 13 Nov 2017.



- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.