드론택배 서비스 실현 방안분석
Method Analysis to realize Drone Delivery Service
- 저자
-
김영화호남권연구센터 yhwkim@etri.re.kr 정연서우정기술연구센터 jys847@etri.re.kr 박문성우정기술연구센터 mspark@etri.re.kr 이동수호남권연구센터 d-soolee@etri.re.kr
- 권호
- 33권 4호 (통권 172)
- 논문구분
- 일반논문
- 페이지
- 70-80
- 발행일자
- 2018.08.01
- DOI
- 10.22648/ETRI.2018.J.330408
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- Drones are now widely used in civilian applications such as filming, leisure, agricultural control, monitoring, and the generation of 3D-spatial information, deviating only from military drones. In the field of logistics, prototypes are emerging in the area of logistics transportation, and to develop a future transportation service under the name of a drone tax, each country is introducing its first flight results using its own unique drones. In this paper, we review the domestic and overseas trends of drone delivery service technology, which requires various capabilities such as automatic flight, and review the related core technologies. We then propose the flight capability and road map of a drone delivery service according to the detailed conditions such as the flight area, visibility, and flight method. Additionally, in connection with the postal processing of the Korea Post Office, which would be a main demand for this type of service, we describe a method for realizing a drone delivery service based on the structure, scenario, and deployment of the drone delivery system.
Share
Ⅰ. 서론
BIS Research의 시장분석에 따르면 전세계적 UAV 시장 규모는 2014년 72.5억 달러에서 2018년 102.1억 달러로 CAGR 9% 성장할 것으로 전망하고, 국내 UAV 시장규모는 2014년 870억 원에서 2018년 1,225억 원으로 CAGR 9% 성장할 것으로 전망하고 있다[1]. 이러한 UAV 시장 분석자료는 기관마다 다르지만 공통적으로 2020년 초반까지 CAGR 10% 이상의 성장을 전망하고 있다.
Gartner 최근 분석에 따르면, 블록체인, 뇌-컴퓨터 인터페이스, API 기반 소프트웨어 정의 보안, 상용 드론 이렇게 4개 분야에서의 기술혁신이 가속화되고 있다고 한다. 특히, 상용 드론(Commercial UAVs)의 경우, AI 하드웨어, 컴퓨팅 파워의 소형화, 딥-러닝 알고리즘의 기술 진보로 금융 서비스, 제조 분야 등 다양한 산업에서 지속적으로 유용하게 적용될 것으로 예상하고 있다. 또한, 2016년 Hype-Cycle에서는 1단계(Innovation Trigger)에 있었지만, 2017년 Hype-Cycle에서는 2단계(Peak of Inflated Expectations)에 있다고 보고 있을 정도로 기술 발전은 빠르게 진행되고 있으며, 기술 안정화 상태를 2년에서 5년 이내로 전망하고 있다[2].
한편, 원자재 조달에서 생산에 이르는 프로세스를 First-Mile Logistics라고 부르고, 생산된 제품을 최종 고객에게 공급하는 프로세스를 Last-Mile Logistics라고 한다. 기존 물류 시스템에서 소비자의 배송 시간 및 배송 속도에 대한 개선요구가 커지면서 Last Mile을 잡는 자가 물류·유통계의 강자가 될 것으로 전망되고 있다. 미국의 아마존, 중국의 순펑쑤윈(SF익스프레스)과 징둥(JD닷컴) 등이 기업 브랜드 파워 및 경쟁력 제고를 위해 유통과 물류 간의 경계를 허물고 있으며, 대규모 투자를 진행하고 있다. 이러한 흐름 속에서, 드론을 활용한 Last Mile Delivery가 부상하고 있다[3].
그리고 당일배송과 즉시배송은 현재 1% 수준이지만, 2025년까지 전체 물류 시장의 20~25%를 차지하고 이런 빠른 서비스가 지방까지 확산된다면 그 비율은 훨씬 더 높아질 것으로 예상하고 있으며, 머지않아 드론을 포함한 무인 배송 수단이 전체 상품의 80%까지를 담당하게 될 것으로 예측하고 있다. 또한, 미국 우편검사국(OIG)의 드론택배에 관한 소비자 인식조사에 따르면, 미국 소비자들은 드론배송이 향후 5~10년 이내에 상용화될 것으로 예상하고 있으나(75%), 아직까지는 드론택배 기술과 안전성에 대해 신뢰하지 못하는 것(37%)으로 조사되고 있다[4].
이러한 드론에 대한 시장 전망, Hype-Cycle, Last Mile Delivery 및 소비자 인식 등과 같은 자료들의 이면을 들여다보면, 드론택배는 드론 서비스 가운데 드론택시 바로 아래 수준의 기술 안정성을 요구하는 핵심기술 집합체의 고난도 서비스로서, 세계 각국이 드론택배에 대한 자국의 미래 비전을 제시하고 기술개발을 진행하면서 경쟁적으로 자신들의 R&D 결과를 제시하고 있다.
본 논문은 드론택배 서비스에 대해 현재 진행 중인 국제적인 흐름 속에서 일시적인 기술개발이 아닌 안전한 미래 물류운송 수단으로 자리 잡기 위해 요구되는 실현방안들을 제시하고자 한다. 이를 위해, Ⅱ장에서는 드론택배 서비스에 대한 국내외 동향을 살펴보고, Ⅲ장에서는 드론택배 서비스를 지원하기 위해 요구되는 다양한 핵심기술을 분석한다. 그리고 Ⅳ장서는 드론택배 서비스의 로드맵 및 비행능력 수준, 드론택배시스템 구조 등을 중심으로 드론택배 서비스의 실현 방안을 제안한다. 마지막으로 Ⅴ장서는 결론으로 드론택배 서비스에 있어 전망과 향후 연구방향 등을 언급한다.
Ⅱ. 드론택배 서비스 기술개발 동향
1. 국외 동향
미국 NASA의 UTM 프로젝트에 따르면, 저고도 드론들의 트래픽 관리를 위해 4단계 기술능력 수준(TCL) 정의하고 단계별 프로토타입을 제시하고 있다. 그리고 여러 이해당사자 간의 역할 및 책임을 고려하여 ANSP (Air Navigation Service Provider) 기능, Operator 기능, 기타 이해당사자 기능으로 구성되는 UTM 시스템 아키텍처를 제안하였다[5].
구글 지주회사 ‘알파벳’은 2017년 6월에 버지니아 공대에서 한 개의 시스템이 다수의 드론(2대: 자체 제작, 1대: DJI 드론)을 서로 다른 경로상에서 동시 조정하는 시험비행을 시연하였고, 상용화를 목표로 수천 개의 드론 네트워크를 지원할 수 있는 드론 교통관제 시스템을 개발하고 있다. 아마존도 영국 및 미국에서 드론택배 시연을 마무리하고 드론이 주변 환경 및 다른 드론과 충돌하지 않도록 드론 교통관제 시스템을 개발하고 있다.
중국의 인터넷 사용자 성장에 힘입어 온라인쇼핑 시장도 급성장하고 있는데, 2016년 온라인 쇼핑몰 시장규모는 5조 위안(834조 원)으로 전년 대비 68.2% 성장하였다. 그리고 이러한 온라인 쇼핑시장의 성장에 힘입어 택배시장은 2016년 물량기준 313억 통, 전년 대비 51.4%, 매출액 기준 3,974억 위안(약 67조 2,000억 원), 전년 대비 43.5% 성장하였다. 하지만, 중국 택배시장의 급성장에 비해 택배 품질이 소비자의 기대를 따라가지 못하고 있다. 특히, 중국의 광활한 영토로 인하여 물류인프라 구축에 상당한 비용이 소요되고 있어 온라인쇼핑몰 기업, 택배사들이 스마트 물류(예: 드론 등)에 대한 관심과 투자가 높아지고 있다[6]. 예를 들면, 중국 택배기업 순펑쑤윈은 중국 최초로 드론의 상업용 공역 운항 승인을 허가받아 장시성 간저우 지역 공역에서 드론을 통한 물품 배송에 성공하였고(2017년 6월), 중국에서 순펑쑤윈와 치열한 선두다툼을 벌이고 있는 징둥도 상업용 드론 시범 배송에 나서고 있고, 동시에 쓰촨성과 산시성에 드론택배 전용 공항을 건설하고 1톤 이상의 무거운 화물을 배달할 수 있는 드론을 개발할 계획이 알려지고 있다.
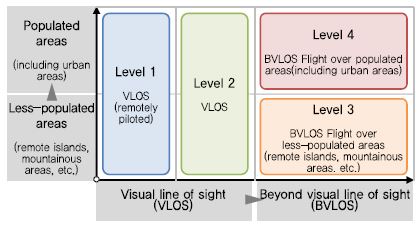
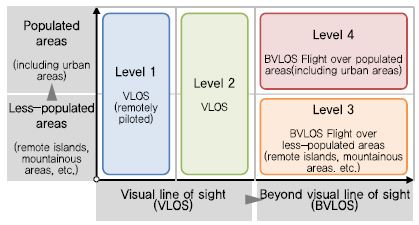
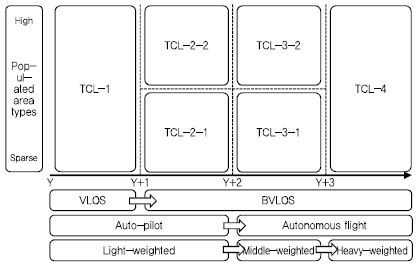
일본은 전통적으로 무인 헬기를 개발하여 정밀농업 분야에 우선 적용하고 있었으며, 최근에는 아베 정부의 재흥전략의 일환으로 NASA의 UTM 프로젝트의 TCL과 유사하게 Level 1부터 4까지 다음 그림과 같이 정의하고, 2018년까지 Level 3(BVLOS, 인구비밀집지역), 2020년까지 Level 4(BVLOS, 인구밀집지역)의 드론택배 서비스를 제공하기 위한 로드맵을 설정하였다. 또한, 후쿠시마에 물품수송, 재난대응 및 인프라 감시 등에 사용하기 위해 50ha 규모의 로봇·UAS 시험공역을 구축 중이며, UTM 등을 연계하여 그동안의 R&D 결과를 2018년에 공개할 계획이다[(그림 1) 참조], [7].
한편, 2016년 4월 11일부터 지바시, 기업, 연구기관 공동 프로젝트로 2019년 실용화를 목표로 지바시 마쿠하리 신도심에서 실증실험 중이며, 지바시, 자율제어시스템연구소, 라쿠텐 및 물류, 통신 등 대기업 10곳 참여하고 있다. 대형 드론이 이치카와시의 도쿄만변에 있는 물류창고에서 약 10km 떨어진 마쿠하리 신도심의 집적소까지 바다 또는 강 상공을 15분가량 비행하여 짐을 운반하고 그곳에서 다시 소형 택배드론으로 근처 고층아파트 각 방 베란다에 배달하는 구조이다[8].
2. 국내 동향
가. 드론 기반 물품 배송시스템 구축사업
‘드론 기반 물품 배송시스템 구축사업’은 2016년 5월부터 2017년 4월까지 1년 동안 산업부의 시장창출형 로봇 보급사업의 일환으로 한국전자통신연구원(주관), ㈜이랩코리아(참여[공급]), 우정사업본부(참여[수요처])가 수행한 것이다[9].
이 사업의 목표는 도서·산간에 긴급 상황이 발생할 때 드론을 활용하여 적시에 해당 의약품, 생필품 등을 배송할 수 있도록 기존의 드론시스템을 물품 배송서비스 용도로 개조하여 물품 배송시스템을 구축하고 적절한 장소에 테스트베드를 구축하고 및 시험·시범 운영을 수행하는 것이다. 도서 지역의 경우 섬과 가까운 내륙 우체국에서 섬의 고정된 장소로 드론이 해당 물품을 배송하고 회귀하고, 산간 지역의 경우 드론 탑재 차량이 운행 가능지역까지 이동 후 드론을 날려 목적지까지 해당 물품을 배송하고 회귀한다. 배송 거리 및 시간은 왕복 40분(편도 20분), 왕복 20km(반경 10km)이다.
나. 무인비행장치 안전성 검증 시범사업
KIAST(항공안전기술원)를 주관기관으로 하여 ‘무인비행장치 안전성 검증 시법사업’을 통해 전국 7개 공역(대구, 전주, 영월, 고흥, 부산, 보은, 고성), 23개 사업자가 참여하여 물품 수송 등 8개 분야에서 2015년 12월부터 2017년 12월까지 CJ 대한통운, 롯데글로벌로지스, 한국비행로봇(참여기관: 한국전자통신연구원, 이랩코리아) 등 23개 사업자를 중심으로 물품 수송 등 8개 응용 분야에 대한 무인비행장치 안전성 검증 시범 사업을 수행하고 있다[10].
다. UTM 사업
NASA에서는 2014년부터 2019년까지 저고도 공역에서 무인기의 안전운항을 위한 교통관리 기술개발을 목적으로 진행하고 있는 UTM 프로젝트의 일명 한국판 UTM 사업으로(2017~2021), 과학기술정보통신부 중심의 ‘저고도 교통관리체계를 위한 보안 및 무인비행장치 핵심기술 개발’, 국토교통부 중심의 ‘무인비행장치의 안전 운항을 위한 저고도 교통관리체계 개발 및 실증시험’, 그리고 경찰청 중심의 ‘이동형 저고도 비행물체 감시장치 개발 및 실증시험’ 세부사업으로 구성되어 있다. 향후, 이 UTM 사업과 드론택배 서비스 사업은 상호연계가 요구된다.
Ⅲ. 드론택배 서비스 핵심기술
1. 택배드론 기체 및 부품 기술
통상 드론은 프레임, 프로펠러, 배터리, 모터, 비행제어컴퓨터, 임무제어컴퓨터, 임무장비 등으로 구성된다. 여기서, 드론택배 서비스를 지원하기 위한 드론(이하, 택배드론)은 보통 40분 이내에 10kg 물품 정도를 적재하고, 도서·산간 및 도심에서 수십km 거리를 가시권·비가시권·야간 자동비행을 안전히 수행할 수 있어야 한다. 이를 위해, 고용량 배터리, 저소음 로터, 드론택배 임무장비(적재함, 충돌 방지등, 조명시설 등), 자연환경(비, 눈, 바람, 저온·고온, 돌풍) 고대응력, 비상대응(RTH, 낙하산, 위치발신기), 정밀 자동 이착륙 등 다양한 기능이 요구된다. 그리고 장기적으로 물류센터와 택배드론 간에 자동 물품 하역(Loading/Unloading) 기능도 필요하다.
2. 드론택배 자동비행 기술
드론택배 자동비행 기술은 드론택배 서비스에서 제일 중요한 기술로서 운영자가 RC를 사용하여 수동으로 택배드론을 비행시키지 않고 운영제어시스템을 통해 사전에 입력한 비행 데이터에 따라 방위, 자세, 고도를 유지하여 택배드론이 출발지에서 목적지까지 그리고 목적지에서 출발지까지 안전한 물품 배송 비행을 할 수 있도록 지원하는 기술이다. 이를 위해, 비행 지역(예: 도서·산간, 도심 등) 특성을 반영한 기본 경로 계획을 근간으로 현재의 외부 조건(예: 풍속)을 반영한 실시간 경로 재생성을 진행하고 지속적으로 비행경로를 모니터링한 후 피드백을 수행한다. 따라서, 정확한 비행경로의 모니터링은 매우 중요한바, 관성항법시스템, 위성항법시스템, 영상기반항법시스템, 지형참조항법시스템 등 다양한 항법시스템을 결합하여 정밀도를 개선하는 것이 필요하다.
3. 택배드론 충돌 탐지 및 회피 기술
택배드론이 출발지점부터 목표지점까지 안전하게 물품의 배송을 마치고 귀환하기 위해 우선적으로 요구되는 핵심기술이 바로 충돌 탐지 및 회피 기술로, 영상추적 기술, 자동비행 기술, 다중-드론 제어 기술 등 다양한 기술들이 서로 연계되어야 이 이슈를 해결할 수 있다. 비행 전 택배드론의 충돌 탐지 및 회피는 정상적 상황에서 운영제어시스템의 드론택배 트래픽관리 기술에서 이착륙 시간 및 비행루트 할당을 통해 해결될 수 있다. 비행 중 택배드론의 충돌 탐지 및 회피는 택배드론 자체에서 실시간으로 주변의 정적·동적 장애물에 대해 수행되는데, 이 역시 해당 범위 내에 있는 택배드론들의 비행 상태를 지속적으로 모니터링하는 트래픽관리 기술과 연계가 필요하다.
4. 택배드론 고장예지 및 건전성 관리 기술
택배드론은 기본적으로 최대이륙중량이 30kg을 상회한다. 우리나라를 제외한 대부분 국가에서 신고대상의 드론을 250g 이상으로 규정한 이유가 250g 드론부터 100m 높이에서 낙하할 때 자동차 유리를 부수고 사람에게 위해를 가할 수 있는 무게라고 한다. 따라서, 30kg 택배드론의 안전성 관리 기술은 무엇보다 중요하다. 그중에 하나가 드론 고장예지 및 건전성 관리(PHM) 기술로 항공 분야에서는 이미 기본기술로 자리잡았으며, 최근에는 발전소, 자동차, 철도 분야 등에 파급되고 있다. 택배드론의 무게로 인해 안전성에 영향을 줄 수 있는 배터리, 모터, 로터, 센서, ESC, FCC, MCC 등과 같은 주요 부품들에 대해 지속적으로 고장·오작동 특성을 모니터링하고, 언제 특정 고장수준 또는 사용불능에 도달할 지 인공지능 기법 등을 사용하여 미리 예지하고, 필요한 경우 사고 발생 전에 정비 및 교체 등의 조치를 해야 한다.
5. 실시간 다중 택배드론 및 배송 제어 기술
하나의 드론시스템으로 동시에 다수의 드론을 제어하는 기술이 다중-기체 제어 기술이다. 현재의 기술 수준은 하나의 드론시스템으로 하나의 드론을 제어하는 것이 일반적이고, 10대 정도의 드론을 동시에 제어할 수 있는 사례도 찾기가 쉽지 않다. 올해 6월에 구글에서 프로젝트 윙을 통해 하나의 드론시스템을 사용하여 3대의 드론(인텔 드론 2대, DJI 드론 1대)을 자동 조정한 정도이다. 하지만, 상용화를 위해서 고수준의 시스템 가용성을 지월할 수 있는 드론시스템을 사용하여 자신의 영역에 있는 모든 드론을 제어할 수 있어야 한다. 이때의 드론 규모는 적어도 수백 대 이상이 될 것으로 추정된다. 하나의 사업자 내에서 각 사이트마다 운영제어시스템을 두는 것은 실증 또는 시범운용에는 적합할 수 있겠지만 상용화 관점에서는 이는 비용면에서나 시스템구조 측면 그리고 유지보수 측면에서도 효율적이지 못하다.
드론이 한 번의 비행으로 다수의 배송지를 방문하며 물품을 배송할 수 있도록 하는 기술이 다중-배송 제어 기술이다. 아마존에서는 미국의 경우 전체 배송 건의 87%가 2kg 미만의 배송 화물로 보고 있다. 만일 최대 10kg의 화물을 운송할 수 있고, 지능형 적재함을 이용할 수 있다면 예전에는 다섯 번의 비행이 필요하였지만, 한 번의 비행으로 임무를 완수할 수 있다. 현재는 한 번의 비행으로 드론이 한 곳만을 방문하지만, 다중-배송 제어 기술을 통해 한 번의 비행으로 N 곳을 방문하여 N배의 배송 효율을 올릴 수 있다.
6. 드론택배 트래픽관리 기술
드론택배 사업자의 운영관리 영역에 속하는 모든 드론에 대한 비행 계획 승인, 드론 자원 관리, 이착륙 및 비행 상태 관리, 충돌 방지를 위한 비행 루트 관리, 기상 정보의 수집 및 통보 등을 통해 도서·산간 및 도심 지역의 저고도 공역에서 드론택배 서비스에 이용되는 다양한 드론들의 교통 흐름을 관리하는 기술이다. 예를 들면, 해당 지역에서 비행승인 요청을 받고 타 택배드론과 충돌(비행궤적 예측 포함) 등 안전 비행 여부를 확인한 후 비행승인을 허가한다. 이후, 약속한 비행경로 상에서 항적을 추적하고 회귀 후 착륙할 때까지 지속적으로 모니터링한다. 한편, 도서·산간에서는 효율적인 배송을 위해 목표지역의 근접지로 이동하여 운영제어 기능을 수행하도록 운영제어 차량을 이용할 수도 있는데, 이때는 비정상 상황을 체크하기 위해 중앙의 트래픽관리 기능과 실시간 통신이 필요하다.
7. 드론택배 통신패스 보호 기술
택배드론의 보안 침해로 인한 사고를 방지하기 위한 우선 중요한 부분은 택배드론과 운영관리시스템 사이의 통신패스를 보호하는 것이다. 통신패스를 보호하는 방법은 통신패스 상에서 교환되는 정보가 노출되지 않도록 하는 정보보호 방법과 특정 통신패스 상에서 장애로 인한 통신 단절 상황을 피하기 위해 통신패스 다중화 방식이 있다. 택배드론과 운영관리시스템 사이에 IP 네트워크(Best effort 또는 Premium 모두 포함)와 무선네트워크가 있다. 무선네트워크는 드론과 지상무선국 사이의 무선링크망과 지상무선국과 PGW 사이의 무선코어망으로 이루어져 있고, IP 네트워크는 PGW와 운영제어시스템 그리고 운영제어시스템과 운영관리시스템을 연결하고 있다. 통신패스 정보보호 방법은 현재 국가 프로젝트로 기술개발을 추진 중이고 전반적인 내용은 참고문헌 [11]에서 기술하고 있다. 그리고 LTE VPN 라우터를 적용하여 택배드론과 운영관리시스템 사이의 통신패스 정보보호 방법은 ‘드론 기반 물품 배송시스템 구축사업’을 통해 프로토타이핑을 수행하였다.
8. 드론택배 시험·검증 기술
드론택배 시스템은 기본적으로 드론택배 서비스를 지원하는 운영관리시스템, 운영제어시스템, 드론으로 구성되고, 이들 구성요소 간 인터넷, 무선통신망 등을 활용하여 통신한다. 그리고 드론택배 시스템과 인터넷 및 무선통신망은 해당 물류기관의 물류인프라가 존재하고 있다. 이러한 복잡한 서비스 지원 구조는 시험·검증 과정에 기본적으로 많은 시간과 비용이 소모될 것으로 예상되며, 특정 부분(예: 드론 자체, 부품, 센서 등)의 보완이나 교체가 이루어진 후에도 필요한 범위 내에서의 회귀(Regressive) 시험·검증을 고려하면 수동으로 수행하는 시험·검증은 원하는 서비스 품질(Quality of Service)에 제대로 대응할 수 없다. 따라서, 드론택배 시뮬레이터(SITL/HITL)를 구축하고 이를 활용한 자동 시험·검증 환경은 드론택배시스템 구축에서 중요한 과정으로 볼 수 있다. 이러한 시험·검증 환경은 AirSim, jMAVSim, Gazebo 등과 같은 드론 시뮬레이션 툴을 기본적으로 사용할 수 있을 것으로 보이지만, 운영관리시스템 ↔ 운영제어시스템 인터페이스, 드론 ↔ 운영제어시스템 인터페이스, 드론택배 기체, 통신망 및 물류기관 인프라 등을 고려하여 단계별 및 부분별 시험·검증 과정을 세분해야 할 것이다.
9. 드론택배 지상통제 기술
드론택배 지상통제 기술은 드론택배 운영제어시스템에서 택배드론 기반 물품 배송을 위한 임무계획 수립, 택배드론 및 임무탑재체의 조종 명령·통제, 영상 및 데이터의 수신·분석, 가시권·비가시권·야간 비행 원격제어 등 택배드론 운영의 중추적 역할을 담당하는 기술이다. 이를 위해, 택배드론 자원 관리, 실시간 지도 데이터 처리, DB, 영상 및 Telemetry 정보 분석 등 세부 기술의 지원이 필요하고, 자동비행, 고장예지 및 건전성 관리, 실시간 다중 택배드론 제어, 트래픽관리 등과 연계하여 택배드론으로 원격명령을 지시하거나 택배드론으로부터 상태정보를 수신하여 적절한 조치를 취해야 한다.
10. 드론택배 운영관리 기술
물류인프라의 접수/발송/분류/도착/배송 프로세스와 드론택배 시스템이 랑데뷰하는 포인트로서, 이용자가 요청한 배송 물품의 배송 정보를 확인하여 택배드론 이용 여부를 판단하고 특정 드론을 선택한 후 배송을 요청한다. 이후, 드론배송 상황 정보를 단계별로 이용자에게 제공하는 기술이다. 좀 더 세부적으로 보면, 물류인프라 정합, 드론택배 프로파일 관리, 드론택배 상황관리, 모바일앱 등과 같은 기능들을 포함하고 있다.
Ⅳ. 드론택배 서비스 로드맵 및 실현 방향
1. 드론택배 서비스 로드맵 및 비행능력 수준
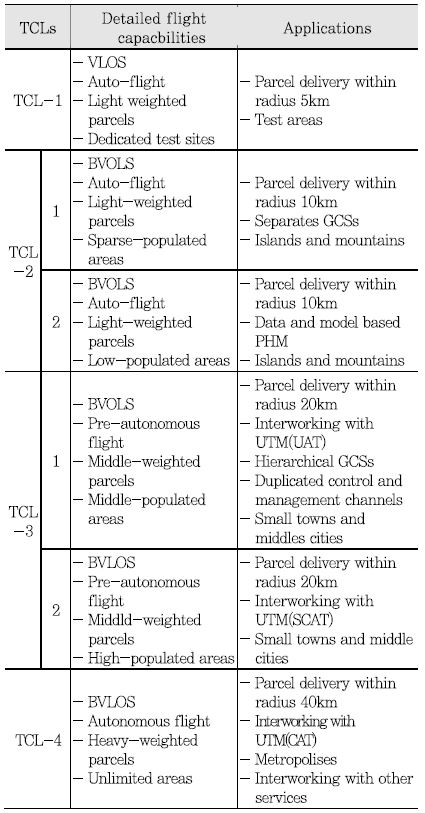
최근 국내에서 진행하고 있는 무인이동체 기술 로드맵은 무인차, 무인선 그리고 무인기를 포함한 포괄적인 로드맵으로, 무인기에 대해서는 저고도, 중고도, 고고도에 대한 내용을 모두 포함하고 있다[12]. 여기서는 드론택배 서비스 자체가 가지고 있는 기술적인 무게에 집중하여 드론택배에 대한 좀 더 세부적인 로드맵을 다룬다. 이를 위해, 미국 NASA의 TCL 및 일본의 비행동작 수준에서 공통적인 요소로 다루고 있는 인구밀집 수준 및 시계 조건에 비행방법 등을 추가하여 다음과 같은 4-단계 TCL을 제시한다[(그림 2), <표 1> 참조].
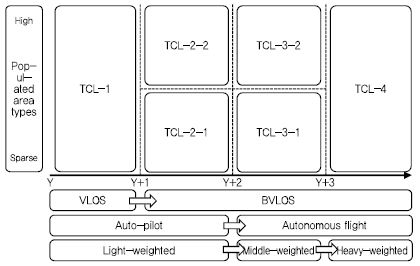
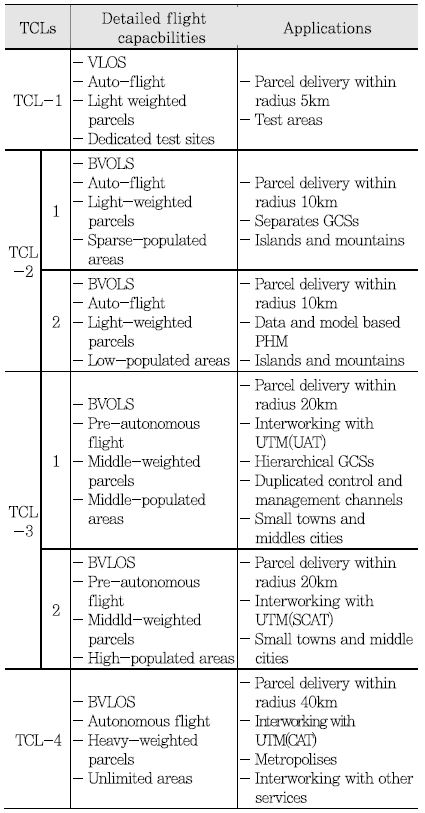
TCL-1은 현재 시험공역에서 가시권/자동/저중량 비행 조건에서 진행중인 상황으로 2018년까지 진행될 수 있을 것으로 예상한다. TCL-2는 도서·산간에서 비가시권/자동/저중량 비행 조건으로 2021년까지 수행될 수 있을 것으로 예상하며, TCL-3은 중소도심에서 비가시권/자율/중중량 비행 조건으로 2024년까지 수행될 수 있을 것으로 전망한다. 그리고 TCL-4는 대도심을 포함하여 지역에 제한 없이 비가시권/자율/고중량 비행 조건으로 2027년까지 수행될 수 있을 것으로 전망한다. 그리고 UTM은 TCL-3부터 비관제공역(Uncontrolled Air Traffic), 분리관제공역(Separated & Controlled Air Traffic), 관제공역(Controlled Air Traffic) 순으로 드론택배 서비스와 연동이 이루어질 것으로 예상한다. 다음 표는 이러한 TCL별 세부 비행 능력 및 응용을 분류한 것이다. 참고로, 드론의 최대이륙중량 및 비행거리 등은 좀 더 논의가 필요하다.
2. 드론택배시스템 구조
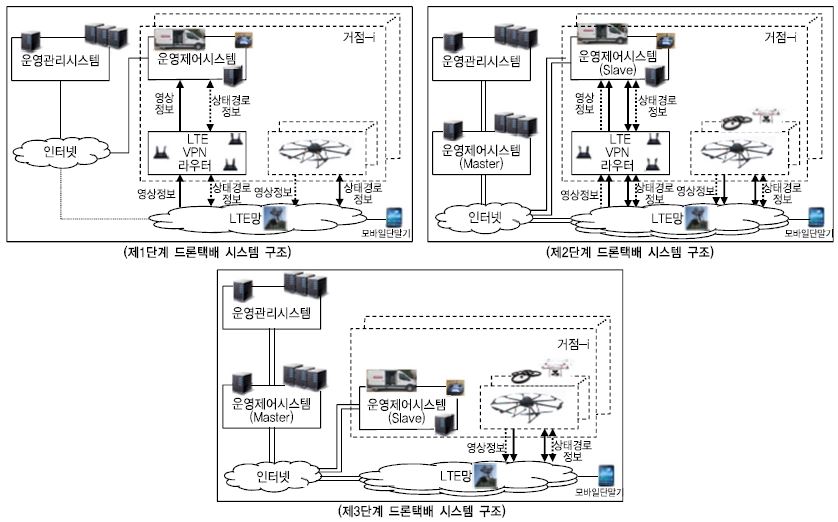
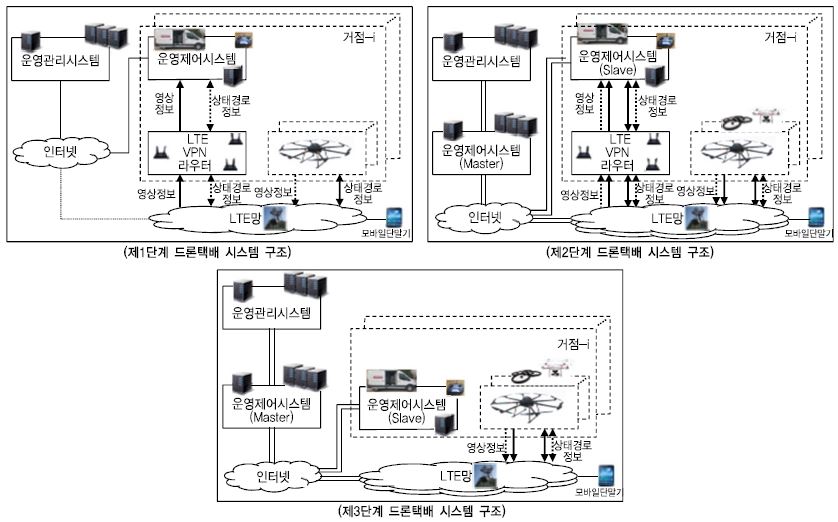
영월 및 고흥 등 몇몇 시험 지역에서 운용되는 TCL-1의 드론택배시스템 구조는 운영제어시스템과 택배드론 사이의 통신패스에 대한 보안을 고려하여 ‘드론 기반 물품 배송시스템 구축사업’에서 적용하고 있는 모델이다. 한편, 드론의 데이터 링크는 크게 위성 링크와 지상 링크 두 가지 유형이 있으며, 지상 링크는 제어 및 비임무용 링크(드론 상태/경로 정보 전송)와 임무용 링크(영상 정보 전송) 두 가지 유형이 있다. 여기서 중요한 점은 운영제어시스템이 드론으로부터 수 km에서 수 십km 떨어져 있기 때문에 드론과 운영제어시스템 간 안정적인 제어를 위해 데이터 링크의 이중화가 중요하다.
예를 들면, 위성 링크와 지상 링크를 동시에 사용하거나 지상 링크만을 이중화시킬 수 있는 방안을 찾아야 한다. 특히, 도서·산간 및 소·중·대 도시를 포함하는 대규모로 드론택배 서비스를 상용으로 제공하는 경우, 효율적인 운영관리를 위해 계층적 운용제어시스템 구조가 필요하고, 운영관리시스템 ↔ 운영제어시스템 ↔ 드론 상의 제어관리 채널의 이중화 구조를 반영해야 한다. 따라서, 주로 도서·산간에서 상용으로 운용되는 TCL-2에서는 각 거점이 제1단계 드론택배시스템 구조하에서 자체적으로 루트 제어와 실증 데이터의 수집 및 분석을 수행한다. 이후, 사전-자율비행이 적용되는 TCL-3에서는 제2단계 드론택배시스템 구조하에서 제어관리 채널의 이중화 및 계층적 운영제어시스템 구조를 적용한다. 이는 수요처의 택배 인프라 환경에 따라 전체 구조가 영향을 받을 수 있다. 예를 들면, 그 인프라 환경이 클라우드 기반 SDI(Software Defined Infrastructure) 형태라면 적절한 시점에서 SDI 기반 드론택배시스템 구조를 반영해야 할 것이다. TCL-4에서는 드론택배 서비스 또는 드론 기반 서비스가 본격적으로 제공되어 그 이전의 시스템 구조로 더 이상 서비스 제공이 어렵고 운영제어시스템과 택배드론 사이의 통신패스에 대한 보안 문제가 해결 가능할 때 제3단계 드론택배시스템 구조를 적용한다.
한편, 제어 및 비임무용 링크를 위한 드론 주파수 대역으로 WiFi(2.4GHz), LTE(850MHz, 900MHz, 1.8GHz, 2.1GHz, 2.6GHz), 드론전용(5,091~5,150MHz 등)이 있다. 여기서 WiFi 주파수 대역은 보안 문제 등으로 드론택배용으로 적용할 수 없으며, 드론 전용 주파수 대역은 현재 주파수 표준으로만 확정해 놓은 상태이다. 따라서, 현실적인 대안으로 기술개발을 완료한 LTE 계열의 주파수 대역을 사용하는 것이다. 기술적으로는 D2D 및 PTT 등의 기능을 가지고 있는 PS-LTE가 가장 효과적인 방안이라고 생각하지만, 아직 표준화가 진행 중인 관계로 이 역시 현실적인 문제가 있다[(그림 3) 참조].
3. 드론택배 서비스 시나리오
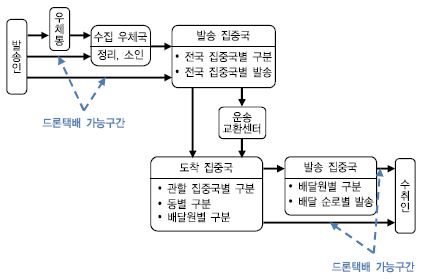
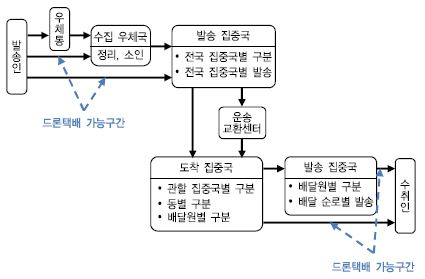
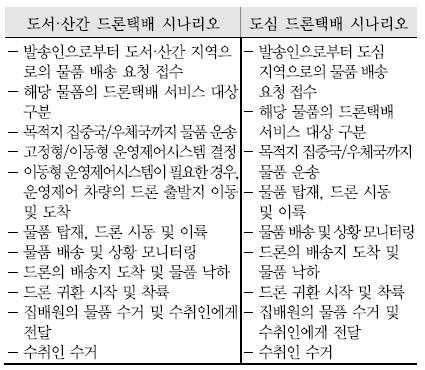
드론택배의 수요처를 우정사업본부로 가정하고 우편물의 처리과정을 대상으로 기술하고자 한다. 즉, 발송인의 우편물을 수집하는 우체국에서는 우편물을 소인하고, 우편 집중국에서는 기계 처리가 원할하도록 정리해 발송한다. 그리고 우편 집중국에서는 우편물을 전국 우편 집중국별로 구분해 다른 우편 집중국으로 직접 발송하거나 운송 교환센터를 거쳐 발송한다. 우편 집중국은 배달을 위해 관할 집배국이나 우편번호에 따라 동별 또는 배달원별로 구분해 해당 집배국으로 보낸다. 이후, 집배국은 우편물을 배달원별로 구분한 다음 배달 순서(배달 순로, 배달길)에 따라 구분하고 수취인에게 최종 배달한다[13]. 여기서, 드론택배가 가능한 구간은 <발송인 ↔ (수집 우체국 또는 발송 집중국)> 구간과 <수취인 ↔ (배달 우체국 또는 도착 집중국)> 구간이다[(그림 4) 참조].
현재 발송인 중심의 드론택배 서비스는 아직 실현되고 있지 않으며, 대부분이 수취인 중심의 드론택배 서비스를 구현하고 있다. 하지만, 기술적인 차이는 없기 때문에 충분히 실현 가능하다. 도서·산간 및 도심 지역에서의 수취인 중심 물품배송 시나리오는 아래 표와 같다[<표 2> 참조]. 여기서 ‘집배원의 물품 수거 및 수취인에게 전달’ 절차는 상황에 따라 생략될 수도 있다.
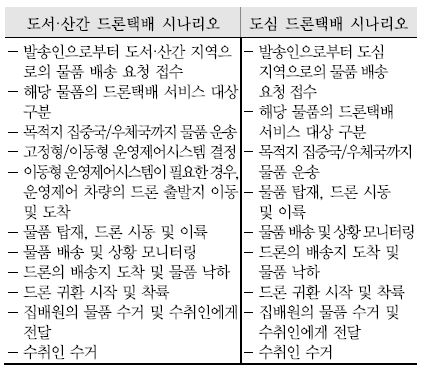
또한, 온라인 및 오프라인으로 매장에서 물품을 구입하고 드론배송을 하고자 하는 경우, 위의 도심 택배 시나리오와 유사하게 다음과 같은 시나리오로 진행될 수 있다.
• 물품매장(또는 물류센터) 위치에서 물품 탑재, 드론 시동 및 이륙
• 물품 배송 및 상황 모니터링
• 드론의 배송지 도착 및 물품 낙하
• 드론 귀환 시작 및 착륙[(그림 4) 참조]
• 수취인 수거[<표 2> 참조]
4. 드론택배 서비스 법·규정 개선(안)
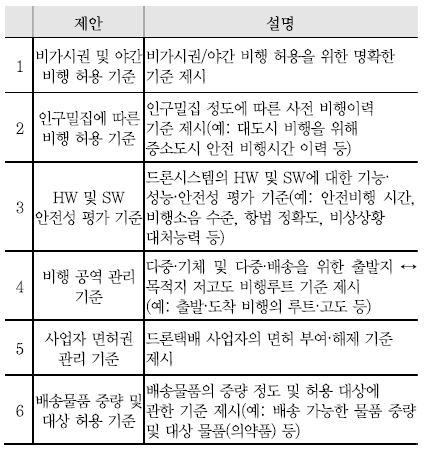
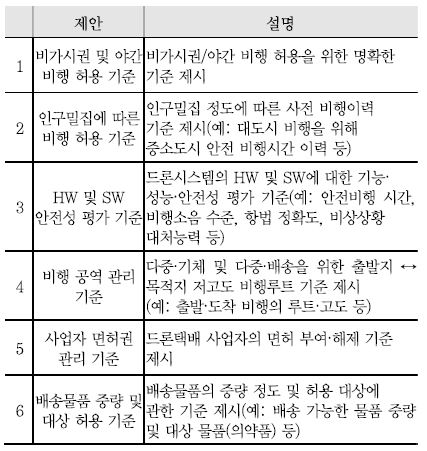
2015년 7월에 네거티브 방식 도입(농업/촬영/관측 분야로 제한된 사업범위를 국민 안전/안보 등을 저해하는 경우 외에는 모든 분야로 확대), 기체 검사 면제범위 확대(자체 12kg에서 최대 이륙중량 25kg 이하로 확대) 등 드론 관련 규제를 개선하였고, 지금까지 적용해오던 항공법을 2016년에 항공안전법, 항공사업법, 공항시설법 3개로 분리하여 법제화하였으며, 야간 및 비가시권 구역의 비행에 대한 규정 개선안(특별비행승인제 도입을 통해 허용)이 최근에는 국회를 통과하여 2017년 11월부터 시행되고 있다[14]. 하지만, 이것으로 드론택배를 지원하기 위한 법·제도가 완비되는 것이 아니며, 이제 시작이다. 드론택배 법·제도가 가장 빨리 진행되고 있는 중국도 올해 7월에 이르러 순펑쑤윈에게 상용 운항을 위해 드론택배 공역의 사용을 허가하였다. 이처럼 드론택배는 전세계적으로 이제 문을 두드리는 시점으로 국내에서도 드론택배 서비스를 위해 드론의 시험 공역 비행이 아닌 일반 공역에서의 비행을 고려하여 필요한 법·규정들은 반영해야 할 시점이 다가오고 있기에 드론택배를 먼저 고민하고 있는 사람으로서 상호 논의의 시작을 위해 다음 사항들을 제안한다[<표 3> 참조].
Ⅴ. 결론
지금까지 드론택배 서비스를 실현하기 위해 어떠한 핵심기술들이 있으며, 주변환경과 어떻게 연계해나가는지를 기술적인 측면에서 다루어 보았다. 일차적으로 해결해야 할 기술적인 이슈는 고용량 동력 기술이다. 현재의 드론 배터리는 30~40분의 비행으로 20km 비행 정도가 한계이다. 그리고 드론을 활용한 여타의 서비스처럼 드론택배에서 안전과 보안은 가장 중요한 이슈이다. 본 논문에서 언급한 거의 모든 드론택배 핵심기술들이 안전과 보안에 관계되어 있다. 하지만, 배터리를 포함해서 아직 해결되지 않고 있는 산적한 기술적 문제는 지속적인 실증사이트 운영 및 R&D 투자 등으로 해결될 수 있을 것이다.
아파트 중심의 도심 환경에서는 드론택배보다는 차량택배가 비용이 적게 드는 것이 현실이다. 하지만, 당일·즉시 배송의 증가, 드론 기술의 발전, 저고도 공역 자원 활용, 스마트 도시화, 지구온난화 대책 등으로 드론택배는 언젠가는 어디에서나 우리 곁에 다가설 것이다. 특히, 국내는 삼면이 바다로 쌓여있고 섬이 약 4,000개 정도로 이에 10%가 유인도로 추정되며 국토의 70%가 산으로 구성되어 있어, 드론을 활용한 농어산촌의 Last-mile 물류 서비스는 당장 지금이라도 안전과 보안을 뒷받침할 수 있는 기술이 개발된다면 저비용의 대국민 보편적 서비스로 충분한 매력이 있다.
이를 위하여, 작년에 ‘드론 기반 물품 배송시스템 구축사업’ 수행을 통해 택배드론 및 운용제어시스템(이동형 포함)의 일차모델을 개발하고 전라남도의 고흥과 강원도의 영월에서 수요처인 우정사업본부와 함께 드론택배 서비스를 시험·운영하였으며, 이젠 두 번째 시도로 도서·산간 및 도심을 대상으로 드론터미널을 구축하고, 택배드론, 운용제어시스템, 운영관리시스템 등으로 구성되는 드론택배 시스템을 적용하는 실증 사업을 기획하고 있다. 아무쪼록, 이 실증 사업의 성공을 통해 국내 드론 기술이 중국, 미국 등과 어깨를 나란히 할 수 있는 계기가 되었으면 한다.
약어 정리
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.