
허영순 (Heo Y.S.) 광융합시스템연구실 선임연구원
류지형 (Ryu J.H.) 광융합시스템연구실 선임연구원
이문섭 (Lee M.S.) 광융합부품연구그룹 책임연구원
강현서 (Kang H.S.) 광융합부품연구그룹 책임연구원
박시웅 (Park S.W.) 광융합부품연구그룹 연구원
김계은 (Kim K.E.) 광융합부품연구그룹 연구원
김성창 (Kim S.C.) 광융합부품연구그룹 책임연구원/실장
Ⅰ. 서론
무선통신 기술의 급속한 발전에 따라 글로벌 모바일 트래픽은 2016년 7Exabytes/month에서 2021년 49Exabytes/month로 연 47% 증가할 것으로 전망하고 있다[1]. 이러한 모바일 데이터의 급격한 증가와 최근 5G 이동통신에 의한 밀리미터 대역 활용으로 RF 스펙트럼 대역이 빠른 속도로 고갈되고 있다. 따라서 RF 스펙트럼의 보완재로서 광학 스펙트럼 대역을 활용한 광무선통신 기술(OWC: Optical Wireless Communication)이 폭넓게 연구되고 있다[2].
일반적으로 자유공간 광전송(FSO: Free Space Optics) 기술은 실외에서 사용되는 광무선통신 기술을 지칭하며, 적외선(Infrared), 가시광(Visible) 및 자외선(Ultraviolet) 영역을 모두 활용할 수 있다. 자유공간의 매질에 따라 지상 또는 우주에서는 적외선 영역을 사용하고 수중에서는 가시광 영역을 사용한다.
FSO 기술은 1) 초광대역, 2) 비면허대역, 3) 저전력(RF의 1/2수준), 4) 초소형(일반적으로 RF 안테나 크기의 약 1/10), 5) 전자기장 간섭에 무관, 6) 장거리 전송(~수십 km), 7) 채널의 보안성(LOS: Line of Sight) 등 RF 방식 대비 많은 장점이 있으나, 외부 환경요인(안개, 눈, 난기류 등)에 의한 채널 가용성(Availability) 및 신뢰성(Reliability) 문제로 널리 활용되지 못하였다[3].
최근 들어 MIMO(Multiple Input Multiple Output), Adaptive optics, Hybrid RF/FSO system 등 FSO 구조 및 신호처리 기법과 관련한 연구가 활발히 진행되어 FSO 기술의 활용 가능성이 점점 높아지고 있는 추세이다. 또한, 전통적으로 고정된 지점 간(빌딩-빌딩, 기지국-기지국 등) 통신방식으로 사용된 FSO 기술은 최근 이동성(Mobility)을 갖는 무인이동체를 대상으로 그 영역을 확대되고 있는 추세이다.
모바일 FSO 기술을 적용 가능한 무인이동체 범주는 매우 광범위하여 지상에서는 자율주행차, 무인열차, 로봇, 공중에서는 무인항공기(UAV: Unmanned Aerial Vehicle), 드론(Drone), 열기구, 해양에서는 무인선박, 무인잠수정, 우주에서는 위성 간, 위성과 지상기지국간에 이미 도입되었거나 향후 적용을 고려하고 있다.
위에서 설명한 바와 같이 FSO 기술은 향후 RF 기반의 무선통신 기술과 협업하여 다양한 이기종 네트워크를 이루며 빠르게 발전할 것으로 전망된다. 시장조사기관인 BCC Research에 따르면 2013년 4천 2백만 달러에 머물렀던 FSO 시장은 2019년 5억 달러에 이르러 연평균 53.3%의 성장률을 보일 것이라 예측된다[4].
본고에서는 최근 다양한 응용분야(국방, 환경, 재난, 농업, 보안, 택배 등)에서 핵심 역할을 수행하고 있는 무인이동체와 연계한 모바일 FSO 기술 동향에 대해 설명하고, ETRI 연구개발 내용을 통해 향후 발전방향에 대해 간략히 소개하고자 한다.
Ⅱ. 모바일 FSO 기술 개요
(그림 1)과 같이 OWC는 사용환경에 따라 indoor와 outdoor 용으로 구분되며, outdoor OWC는 다시 육상(Terrestrial), 수중(Underwater), 우주(Space) 환경용으로 세분화가 가능하다[5]. OWC는 이동 가능 여부에 따라 고정형(Fixed) 시스템과 모바일(Mobile) 시스템으로 나눌 수 있고, 모바일 시스템은 송수신부의 구성에 따라 고정형-모바일 시스템 구성 및 모바일-모바일 시스템 구성이 가능하다.
")
모바일 FSO 시스템은 (그림 2)와 같이 광 송신부, 통신채널, 광 수신부 및 송수신부 간 LOS 구현을 위한 추적시스템(PAT: Pointing, Acquisition, Tracking)으로 구성된다[6]. 광 송신부는 광신호를 생성하고 전송하기 위한 광원, 광원 구동 드라이버, 변조기, 광학계 등으로 구성되며, 광 수신부는 광신호를 수신하고 해석하기 위한 광학계, 광수신기, 광신호 처리부 등으로 구성된다. PAT 시스템은 추적 기술과 전략에 따라 GPS, 이미징 장치, 비콘 빔 시스템, PTU(Pan and Tilt Unit) 등으로 구성 가능하며, 송신부가 이동체의 수신부를 지향하는 Pointing 과정과 수신부에서 추적신호를 수신하는 Acquisition 과정 및 이동체 추적을 통해 FSO 링크를 유지하는 Tracking 과정을 순차적으로 수행한다.
")
따라서 모바일 FSO 시스템 기술은 광 송수신부 간 LOS를 지속적으로 유지하는 PAT 기술, 대기에서 발생하는 대류, 흡수, 산란 등으로 인한 광신호 손실 및 왜곡 문제를 해결하기 위한 채널 모델링 기술, 장거리/광대역 전송을 위한 광학계 구조 설계 기술, 강건한 무선 통신 채널 특성을 확보하기 위한 신호처리 기술 등으로 구성되며, 다양한 물리계층 및 링크계층 핵심 기술 개발이 요구된다. Ⅲ장에서는 해외에서 진행된 무인이동체 기반 모바일 FSO 연구 동향을 소개하고 각 요소 기술에 대해 자세히 살펴본다.
Ⅲ. 모바일 FSO 해외 연구 동향
1. 미국
미국에서는 최근 무인이동체와 FSO 기술을 활용하여 인터넷 접속이 불가능한 지역에 인터넷 접속이 가능하도록 서비스를 제공하고 있으며 나아가 재난으로 인해 인터넷 연결이 불가능한 경우를 대비하기 위한 프로젝트를 진행 중에 있다.
Google에서는 Google X 인큐베이션 프로젝트를 모태로 ‘Project Loon’을 통해 성층권에서 열기구 간 레이저 빔을 이용하여 FSO 메쉬 네트워크(Mesh network)를 구축하고, 지상 40km 반경 내 공중 무선네트워크를 구성하여 지상에 LTE급 인터넷 서비스를 제공하는 것을 목표로 연구를 진행하고 있다[7], [8]. Google은 최근 Project Loon을 통해 약 20km 상공에서 최대 107km 떨어져 있는 열기구 간 130Mbps 양방향 FSO 통신을 구현하였다. 이를 위해 각각의 열기구에는 서로 다른 적외선 대역의 광 송수신기 및 가시광 대역 비콘 송수신 시스템을 탑재하였고, 성층권에서 부는 바람에 의해 움직이는 열기구 간 신뢰성 있는 FSO 링크 구축을 위해 정밀 고도 측정 시스템과 GPS 및 비콘을 활용한 PAT 시스템을 구축하였다[8].
Facebook에서도 성층권 드론을 활용한 Aquila Project를 진행하고 있다[9]. 이 프로젝트는 드론 간 10Gbps FSO 기술 개발을 통해 지상 약 50km 반경 내에 인터넷 서비스를 제공을 목표로 한다. 이 기술에서 Aquila 드론은 태양광 에너지를 이용하여 18~27km 상공에서 80mph 속도로 3개월간 비행이 가능하며, 열기구 대비 정밀 위치제어가 우수한 장점이 있으나, 비행시간 연장을 위해 비행체 무게와 소비전력을 줄여야 하는 이슈가 있다. 현재 Aquila 드론은 성층권 비행시험만 완료한 단계로 향후 성층권 드론 간 Giga급 FSO 링크 구현을 위해 추가적인 기술 개발이 이루어질 것으로 예상된다.
2. 영국
영국에서는 FSO 기술 개발을 위해 옥스퍼드 대학과 에어버스 그룹이 공동으로 Hyperion Project(2013. 2~ 2015. 8)를 진행하였다[10]. Hyperion Project는 지상에 위치한 정밀 레이저 송수신 시스템과 PAT 시스템 및 MRR(Modulated Retro Reflector)을 탑재한 드론을 이용하여 300m 거리에서 드론-지상 간 2Mbps 하향 전송이 가능한 FSO 시스템을 구현하였다[11]. 지상시스템의 광 송신부는 드론에 탑재된 MRR에 레이저 빔을 정확하게 조사하고 홀로그램 패턴을 형성하기 위해 SLM(Spatial Light Modulator)을 사용하였으며, 드론을 인식하고 추적하기 위한 PAT 전략으로 GPS와 CCD 카메라를 이용한 coarse tracking 기술과 홀로그래픽 빔 조향기술을 이용한 optical fine tracking 기술을 활용하였다. 본 프로젝트는 홀로그램 빔 조향기술을 이용하여 드론 기반 모바일 FSO 시스템을 구현했다는데 의의가 있으나, 다중양자 우물(Multi-quantum well)을 이용한 MRR 셔터 속도가 최대 수십 Mbps로 제한되어 Giga급 대용량 데이터 전송이 불가능한 한계가 있다.
MRR을 이용한 무인이동체 FSO 시스템 구성은 탑재 중량 및 소비전력 감소와 LOS 구성이 용이한 장점이 있으나, 광원에서 출발한 빔이 지상-드론 간 왕복으로 단일경로 전송 대비 거리가 2배 증가하여 거리 제곱에 비례하는 자유공간 광손실이 크게 증가하는 문제가 있다. 이러한 이유로 MRR을 이용한 FSO 시스템은 단일경로 전송 대비 강한 빔 세기가 요구되며, 그 결과 소비전력이 증가하고 시스템 구성이 복잡해질 뿐 아니라 eye safety 문제가 추가적으로 발생할 수 있다. 또한, MRR을 사용하는 FSO 시스템에서 광 송수신부가 분리된 경우, 광 송수신부 사이 간격이 멀어질수록 광 송신부의 광축(Gaussian 분포 중심)과 광 수신부 광축이 멀어져 Gaussian 분포에 따라 수신광량이 점점 감소하는 문제가 발생할 수 있다[12]. 아울러 MRR 기반 FSO 시스템은 송수신 빔 파장이 동일하여 단일 광경로를 이용하는 광학계에서 송수신 광신호 분리가 어렵고, 그로 인해 단방향의 하향 데이터 전송만 가능한 한계가 있다.
3. 독일
독일에서는 정찰, 감시 등 임무를 수행하는 비행기에서 지상 관제소로 전송할 데이터양의 지속적 증가에 따라 비행기-지상시스템 간 고속 레이저 무선통신 시스템 개발을 위해 Project DODfast(Demonstration of Optical Data link fast, 2011. 11~2014. 2)를 진행하였다[13], [14]. 본 프로젝트에서는 적외선 레이저를 사용하여 50km 거리에서 마하 0.7로 비행하는 전투기와 지상시스템 간 1.25Gbps 하향 링크로 구성된 모바일 FSO 시스템을 구현하였다. 이를 위해 600mm 주경을 갖는 Ritchey-Chretien 망원경을 집적한 대형 광수신기와 PAT를 위한 정밀 적외선 비콘 시스템을 탑재한 지상시스템을 개발하였다. 고속으로 움직이는 전투기를 추적하고 지상시스템과 전투기의 MLT(Micro Laser Terminal)가 정확한 LOS를 구축할 수 있도록 RF 통신을 이용하여 전투기의 상태정보와 GPS 정보를 수집하고, 지상시스템과 MLT에 각각 탑재한 고출력 적외선 비콘 상향/하향 시스템을 이용하여 상호 간의 정밀 PAT가 가능하도록 하였다[14]. 그러나 비행기-지상시스템 간 GSP 위치정보 전송 지연 문제와 비콘 상향 링크 과정에서 발생하는 비콘 수신센서 포화(Saturation) 문제에 의한 PAT 지연 및 실패 문제는 앞으로 해결해야 할 과제이다.
4. 스페인
스페인에서는 국가보안, 민간 및 국방 분야 등에 소형 무인이동체를 활용하기 위한 목적으로 SINTONIA 프로그램을 진행하였다[15]. SINTONIA 프로그램은 보잉 그룹 주도로 수행되었으며, 무인이동체 통제 및 데이터 전송을 위한 FSO 요소기술 개발을 추진하였다. 본 연구에서는 무인이동체에서 지상으로 데이터를 전송하기 위해 무인이동체에 MRR을 탑재하고, 이를 이용하여 광신호를 변조하여 반사시키는 방식을 사용하였다. MRR을 이용한 모바일 FSO 기술은 앞서 언급한 바와 같이 장거리 전송이 어렵고, 광학계에서 송수신 광신호 분리가 어려운 문제가 있다. 본 연구에서는 통신거리 증가에 따른 빔 확산 손실을 줄이기 위해 통신거리에 무관하게 동일한 빔 폭을 갖는 레이저가 MRR에 도달할 수 있도록 광학계를 제어하는 방법을 연구하였고, 동일한 파장의 송수신 빔 분리 문제를 해결하기 위해 편광식별(Polarization discrimination)기술을 적용하였다.
Ⅳ. 모바일 FSO 핵심 요소기술
1. 광학계 및 광통신 모듈
가. Optical Transmitter
FSO 시스템에서 사용되는 광원의 종류와 파장은 적용환경과 분야, 전송속도, 광출력, 크기, 무게, 비용, 잡음 및 변조 특성, eye/skin safety 등을 종합적으로 고려하여 선택하는 것이 중요하다. 대기권 내 FSO 전송을 위한 광원은 대기에 의한 파장별 손실 특성을 고려하여 투명대(Transmission window) 영역에 속하는 780~850nm, 1,520~1,600nm 파장의 광원이 주로 사용된다.
반도체 레이저는 적외선을 이용한 광통신분야에서 Giga급 통신을 위한 광원으로 주로 사용되고 있다. 단일 주파수(Single frequency) 및 one spatial mode 특성을 가지며 크기와 무게가 작을 뿐 아니라 구동방법이 쉬운 장점이 있다. 그러나 광출력이 낮아 장거리 전송을 위해 EDFA(Erbium doped fiber amplifier) 또는 SOA (Semiconductor optical amplifier)와 같은 증폭기가 필요하다. 반면, 광섬유 레이저는 10kW급 광출력이 가능하고 상대적으로 낮은 잡음 특성을 갖지만, 의도하지 않은 비선형 효과가 발생할 수 있다.
광신호 변조를 위한 방식에는 광신호의 세기, 위상, 주파수, 편광 성분 등을 제어하여 방식이 있으며, 이 중 FSO 시스템에서는 광신호 세기를 제어하는 변조방식이 가장 많이 사용된다. 광신호 세기 제어를 통한 변조는 광원에 인가되는 전류를 직접 제어하거나 외부 변조기를 사용하는 방법이 있다. 외부 변조기를 이용한 광신호 변조방식은 광원 파워를 모두 이용할 수 있고 고속 전송에 적합한 장점이 있으나, 구조가 복잡하고 높은 구동전류가 필요한 단점이 있다.
나. Optical Receiver
FSO 시스템에 사용되는 광수신기는 대기를 통해 전송된 데이터를 수집하고 복원하는 역할을 한다. 광수신기에서 가장 중요한 파라미터는 수신감도(Sensitivity)이며, 수신감도는 광검출기 종류, 포톤(Photon) 검출방법, 변조방식, 잡음 특성 등에 의해 영향을 받는다. 수신감도는 호모다인(Homodyne) 타입이 가장 우수하지만, 시스템 구성이 복잡하고 가격이 높은 단점이 있다. 광수신기에서 발생하는 잡음에는 백그라운드 잡음(Back-ground noise), 암전류(Dark current), 신호 샷 잡음(Signal shot noise) 및 열 잡음(Thermal noise)이 있으며, 광학 설계, 검출기 종류, 데이터 대역폭 및 FSO 링크 유형에 따라 달라진다. FSO 시스템에서는 일반적으로 PIN(p-i-n) 타입과 APD(Avalanche Photodiode) 타입의 광검출기가 사용되며, 대기에 의한 광신호 손실 및 PAT 문제로 인한 수신광량 감소문제를 대비하고 충분한 링크 버짓(Link budget)을 확보하기 위한 목적으로 수신감도 특성이 우수한 APD 타입 광수신기가 주로 사용된다.
다. FSO 광학계
FSO 시스템에서 광신호 제어를 위해 매우 중요한 역할을 수행하는 광학계는 렌즈(Lens), 필터(Filter), 빔 스플리터(Beam splitter), 미러(Mirror) 등으로 구성된다. 렌즈는 광 송신부에서 나오는 빔의 발산각을 제어하고 광 수신부로 입사하는 빔의 수렴각을 조절하는 역할을 한다. 필터는 수신기로 외부 잡음성분이 입사하는 것을 차단하고 신호 성분만 투과시키는 블록필터와 다파장 광신호를 구분하여 서로 다른 경로로 보내는 WDM (Wavelength Division Multiplexing) 필터가 많이 사용된다. 빔 스플리터는 입사하는 광신호를 일정 비율로 분기하는 역할을 수행하며, PAT 전략에 따라 PAT 영상신호 또는 비콘 신호와 광신호 등을 분기하는 역할을 한다. 끝으로 미러는 광 송수신부에서 광경로를 제어하거나 미세 각도조절을 통해 정밀한 PAT가 가능하도록 한다.
2. PAT
가. 짐벌 기반 PAT 기술
일반적으로 UAV를 이용한 모바일 FSO 시스템에는 (그림 3)과 같이 짐벌 기반 PAT 기술이 주로 사용된다. 짐벌 기반 PAT 기술은 광범위한 각도 동작범위가 요구되고 유연한 시스템 구성이 필요한 FSO 활용분야에 적합하며[16], 다른 PAT 기술들과 하이브리드 결합이 가능한 장점이 있다. 그러나 짐벌을 이용한 PAT 기술은 큰 스텝의 모터구동으로 해상도가 떨어지고 고정밀 PAT 구현이 어려운 단점이 있어 이를 보완하는 기술의 접목이 요구된다.
")
나. 미러 기반 PAT 기술
미러 기반 PAT 기술은 경량의 FSM(Fast Steering Mirror)을 이용하여 비콘 빔 안정화, 포인팅 및 추적과정을 수행하며 정밀한 PAT가 요구하는 FSO 시스템에 주로 사용된다. FSM을 활용한 PAT 기술은 고속동작 및 고해상도 특성을 갖는 반면, 짐벌 기반 PAT 기술 대비 구동부 크기가 작아 상대적으로 제한된 POV(Point of View)를 갖는다[16]. FSM은 액추에이터(Actuator) 유형에 따라 크게 기계식, PZT(Piezo-Electric Transducer) 및 MEMS(Micro-Electromechanical Systems) 식으로 분류된다. 기계식은 코일을 통해 흐르는 전류의 진폭, 주파수 및 방향을 변조하여 FSM을 움직이는 방식으로 큰 각도 동작범위와 세분화된 동작 제어가 가능하지만, PZT 및 MEMS 기반 FSM 대비 크기가 큰 단점이 있다. PZT 기반 FSM은 응답 속도가 빠르고 높은 분해능을 가지며 큰 FSM을 움직일 수 있는 장점이 있으나, 밀리 라디안(mrad) 수준의 제한된 각도 동작범위를 갖고 비선형 현상이 발생할 수 있어 복잡한 컨트롤러가 필요한 단점이 있다. MEMS 기반 FSM은 다수의 마이크로 미러를 제어하여 반사 표면을 변형시키고 이를 통해 다양한 형태로 반사되는 광선의 파면(Wave front)을 제어할 수 있는 장점이 있으나, 외부 충격에 취약하고 반복성이 떨어지는 단점이 있다.
다. 액정 기반 PAT 기술
액정(Liquid crystal) 기반 PAT 기술은 레이저 빔의 진폭 또는 위상을 제어하기 위해 수많은 길고 얇은 전극으로 배열된 미세 빔 조향 장치를 사용하고[18], 픽셀에 인가되는 전압 조절을 통해 액정의 변조파면 또는 회절격자를 제어함으로써 원하는 각도로 빔을 편향시킨다. 액정은 투과형 또는 반사형으로 선택적 구성이 가능하다. 투과형 액정은 빔이 액정을 통과할 때 빔을 조절하거나 변조하고, 반사형 액정은 반사표면을 제어함으로써 반사되는 빔을 조절하거나 변조한다.
액정 기반 PAT 기술은 미러 기반 PAT 기술 대비 큰 각도 동작범위(sub-mrad) 제어가 가능하고, 저비용, 저전력, 경량화 및 고속재연이 가능한 장점이 있으나 짐벌 기반 PAT 기술 대비 제한된 각도 제어범위를 갖는 단점이 있다.
라. RF/FSO 하이브리드 PAT 기술
최근 FSO 터미널 사이 장애물 등으로 인해 LOS가 일시적으로 끊어지는 경우를 대비하여, FSO 링크 중단 시간을 최소화하기 위한 방법으로 RF 기반 PAT 기술을 보조 링크로 활용한 RF/FSO 하이브리드 PAT 기술이 주목받고 있다[19]. RF 기반 PAT 보조 링크 기술은 비콘 빔이 차단되어 LOS가 끊어지는 경우, RF 통신을 이용하여 상대방 FSO 터미널의 위치 정보를 파악하고 레이저 빔이 상대방 FSO 터미널을 지속적으로 지향할 수 있도록 도와준다. 그러나 RF 기반 PAT 보조 링크 기술은 FSO 링크 기술에 비해 통신거리와 데이터 전송속도가 제한되고 RF 모듈이 추가적으로 필요하여 PAT 시스템 비용과 복잡도가 증가하는 문제점이 있다.
3. 변조 방식, 코딩, 전송 프레임, 네트워크
FSO 전송은 대기상태에 따른 흡수와 회절 및 통신거리 증가에 따른 scintillation 영향으로 광신호 손실과 왜곡이 발생하고, 전송경로 상 물체(새, 비행체 등)에 의한 가려짐(Fading)이나 신호두절(Outage) 현상이 발생할 수 있다. 따라서 FSO 통신성능 저하 및 장애요소들을 고려한 변조 및 코딩 방식에 대한 연구가 필요하며, 이를 위한 연구가 단일 모바일 FSO 및 멀티 모바일 FSO 시스템에 걸쳐 폭넓게 진행되고 있다. FSO 시스템에서 도출 가능한 주요 이슈와 이와 관련된 연구내용을 <표 1>에 정리하였다[5], [20].

가. 변조 방식
FSO 시스템에서는 일반적으로 구현 단순성, 저가격, 높은 신뢰성을 갖는 이진신호(Binary signal) 기반의 OOK(On-Off Keying) 변조 방식이 주로 사용되고 있다. 최근에는 전송거리와 파워 효율을 높이기 위한 목적으로 PPM(Pulse Position Modulation) 또는 PAM(Pulse Amplitude Modulation) 방식 등이 연구되는 추세이다[21]. PPM은 정해진 타임슬롯에 데이터를 펄스 위치로 변조하는 방식으로 상대적으로 파워 효율을 높이고 전송거리를 향상시킬 수 있는 장점이 있다. PPM은 PAM의 장점에 추가적으로 펄스의 위치뿐 아니라 펄스의 크기(Amplitude)를 변화시킬 수 있는 장점이 있다. PAM과 PPM을 이용한 변조 방식은 OOK 변조 방식에 비해 회로 복잡도가 높은 단점이 있으나, 신뢰성 높은 FSO 네트워크 구성이 가능하다는 점에서 향후 더 많은 연구가 수행될 것으로 예상된다[<표 2> 참조], [22].

나. 코딩
채널 코딩은 일정한 BER(Bit Error Rate)에서 SNR (Signal-to-Noise Radio)을 개선하기 위한 목적으로 사용된다. 채널 코딩은 전송 링크 상에서 하드웨어 비용을 줄일 수 있는 장점이 있는 반면 MAC(Media Access Control) 레이어 상에서 시스템이 복잡해지는 단점이 있다.
신뢰성과 파워 버짓을 높이고 광손실과 전송 에러 등을 줄이기 위해 FEC(Forward Error Correction), reed-solomon, convolution, turbo, LDPC(Low-Density Parity Check) 코드 등 다양한 채널 코딩 방법이 개발되어 있다. 일반적으로 이더넷에서는 8B10B 코딩을 주로 사용하고, SDH(Synchronous Digital Hierarchy)/SONET (Synchronous Optical Network) 계열에서는 FEC 또는 reed-solomon 코딩을 주로 사용한다. 현재 장거리(~수 km 이상) FSO 시스템에서는 전송 효율 향상을 위한 목적으로 주어진 통신 환경에 가장 적합한 채널 코딩 방식을 선택하여 사용하고 있다.
다. 전송 프레임
현재까지 FSO에 최적화된 전송 프레임과 프로토콜에 대한 연구는 미흡한 수준이며 주로 이더넷 프로토콜을 이용한 시범 테스트가 수행되었다[(그림 4) 참조], [23]. 표준화 단체인 ITU나 IEEE에서도 FSO에 대한 프로토콜보다 대기환경에 따른 광링크의 디자인에 초점을 두고 표준화가 진행되었다[24]. 이는 기존 FSO 관련 연구들이 대부분 대기환경 분석을 통한 성능개선에 초점이 맞춰져 있었기 때문이다. 최근 들어 FSO 전송 프레임과 프로토콜 개선에 대한 연구 논문들이 점차 발표되고 있는 추세이다[25].
")
앞서 언급했듯이 FSO는 대기환경에 많은 영향을 받는다. 따라서 FSO 통신환경에 강건한 프레이밍(Framing)이 요구되며, 물체에 의한 가려짐, PAT 오류 등으로 인한 통신두절 현상에 대비하기 위해 빠른 광신호 복구를 위해 버스트모드 프레이밍(Burstmode framing), 능동 페이로드 알고리즘(Active payload algorithm) 등의 적용을 고려할 필요가 있다.
라. 네트워크
FSO 네트워크에서 P2MP(Point to Multipoint), MP2MP (Multipoint to Multipoint)에 관한 연구는 아직 초기단계이다. FSO 네트워크의 강건함과 end-to-end QoS (Quality of Service) 보장을 위해 전송 속도, 신뢰성, 지터(Jitter) 지연, 데이터 손실 등에 대한 종합적인 고려가 필요하다. 특히 네트워크 성능 최적화 측면에서 QoS 보장에 대한 요구가 점점 더 증가할 것으로 예상된다. 따라서 FSO 네트워크의 QoS 보장을 위해 end-to-end 접속 지연, 지연 변이, 패킷(Packet) 거부율, 오버헤드(Overhead) 등의 평가를 통해 라우팅 프로토콜(Routing protocol)을 개선하고, 네트워크 형태나 종류에 따라 최적의 네트워크 토폴로지를 선택해야 한다.
4. Channel 특성
가. Atmospheric Losses
FSO 링크에서 통신채널 역할을 하는 대기의 상태는 다양하게 분류가 가능하며, 대기 상태에 따라 광손실 정도가 다르다. 맑은 날은 광손실이 상대적으로 적으나, 안개나 구름이 낀 날은 최대 -89.6dB/km까지 광손실이 발생할 수 있다. 비가 내리는 날은 빗방울의 크기에 따라 -3dB/km에서 -7.1dB/km까지 광손실 발생이 가능하다[16].
FSO 링크에서 가장 큰 광손실 원인 중 하나는 파장에 따른 투과손실이다[16]. 이는 대기 중에 다양하게 존재하는 가스, 에어로졸, 먼지, 수분, 연기 등의 부유물에 의한 흡수, 산란(Rayleigh, Mie, Geometric) 등에 기인하며, 부유물의 밀도와도 밀접한 관계가 있다. FSO 링크에서 광원으로 주로 사용되는 가시광 영역과 적외선 영역 파장의 흡수는 대부분 대기 중 수분, 이산화탄소, 오존에 의해 일어나는 것으로 알려져 있다.
광신호가 대기를 전파하는 과정에서 반사 및 회절 등으로 인해 경로가 변경되거나 확산이 일어날 수 있으며, 그 결과 광신호가 광 수신부 광학계를 벗어나거나 충분한 세기가 광수신기로 입사되지 못하는 문제가 발생할 수 있다. 따라서 대기에 의한 광신호 손실과 왜곡의 원인을 파악하고, 이를 개선하기 위해 노력이 요구된다.
나. Atmospheric Turbulence
대기 난기류(Atmospheric turbulence)는 FSO 통신채널에서 광신호 손실과 왜곡을 야기한다. 난기류에 의한 현상은 turbulent eddy 크기와 광신호 파장의 관계에 따라 beam wander(eddies>wavelength), beam scintillation(eddies≈wavelength), beam spreading(eddies< wavelength)으로 구분된다. Beam wander의 경우, 광신호 전파 경로는 불규칙적으로 바뀌며 LOS가 끊어지거나 수신광량이 감소하는 문제가 발생한다. Beam scintillation의 경우, turbulent eddies는 렌즈와 같은 역할을 하고, 그 결과 수신광량이 감소하고 SNR이 나빠진다. 끝으로 beam spreading의 경우, 광신호 일부가 회절 및 산란되어 수신광량이 감소하고 수신된 광신호 파면에 왜곡이 발생한다. 대기 난기류에 의한 FSO 성능 저하 문제를 해결하기 위해 수광부 크기를 증가시키거나 MIMO 타입 송수신부를 사용하기도 하며 광신호 파면 왜곡 문제를 해결하기 위해 adaptive optics 기술을 사용하기도 한다.
Ⅴ. 향후 발전 방향 및 결론
무인이동체를 위한 광대역 통신 수단으로 주목받고 있는 모바일 FSO 기술은 지금까지 위성 간 통신 등 자유공간상 매질의 제약이 없는 분야에서 한정적으로 연구 개발되어 왔다. 하지만 최근 들어 드론, 로봇, 자율주행차, 무인열차, 무인선박, 무인잠수정 등 무인이동체 기술의 발전과 더불어 광대역 데이터 전송의 요구사항이 늘어남에 따라 지상 및 해저에서 활용 가능한 모바일 FSO 기술이 활발히 연구되고 있다.
ETRI에서는 10m/s로 비행하는 드론과 지상관제 시스템 간 100m 반경 내에서 1Gbps Full-Duplex 링크를 지원하는 모바일 FSO 시스템 개발을 수행하고 있다[(그림 5) 참조]. 드론 탑재를 위한 소형/경량화 광학구조 설계, 움직이는 이동체를 추적하고 LOS를 유지시킬 수 있는 정밀 PAT 기술, 채널 및 이동체 특성을 고려한 통신방식 등이 핵심적으로 확보해야 할 기술로 예상된다.
")
약어 정리
APD
Avalanche Photodiode
BER
Bit Error Rate
EDFA
Erbium Doped Fiber Amplifier
FEC
Forward Error Correction
FPGA
Field Programmable Gate Array
FSM
Fast Steering Mirror
FSO
Free Space Optics
LDPC
Low-Density Parity Check
LOS
Line of Sight
MAC
Media Access Control
MEMS
Micro-Electromechanical Systems
MLT
Micro Laser Terminal
MIMO
Multiple Input Multiple Output
MP2MP
Multipoint to Multipoint
MRR
Modulated Retro Reflector
IEEE
Institute of Electrical and Electronics Engineers
ITU
International Telecommunication Union
OOK
On-Off Keying
OWC
Optical Wireless Communication
PAM
Pulse Amplitude Modulation
PAT
Pointing, Acquisition and Tracking
PHY
Physical
POV
Point of View
PPM
Pulse Position Modulation
P2MP
Point to Multipoint
PTU
Pan and Tilt Unit
PZT
Piezo-Electric Transducer
QoS
Quality of Service
SDH
Synchronous Digital Hierarchy
SLM
Spatial Light Modulator
SNR
Signal-to-Noise Ratio
SOA
Semiconductor Optical Amplifier
SONET
Synchronous Optical Network
UAV
Unmanned Aerial Vehicle
WDM
Wavelength Division Multiplexing
References
(그림 1)
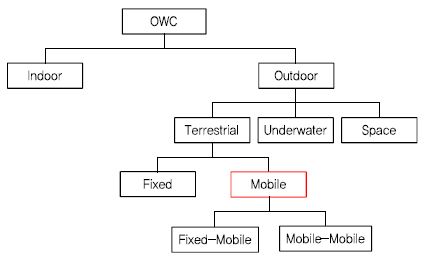
OWC 기술 분류
(그림 2)
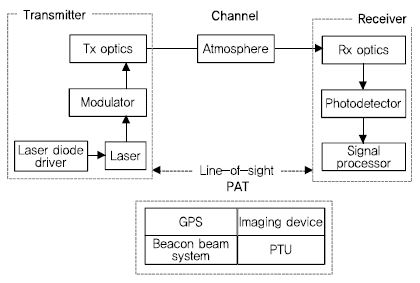
모바일 FSO 구성요소
(그림 3)
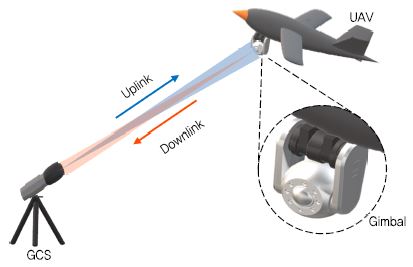
짐벌 기반 PAT 기술 개략도
<표 1>
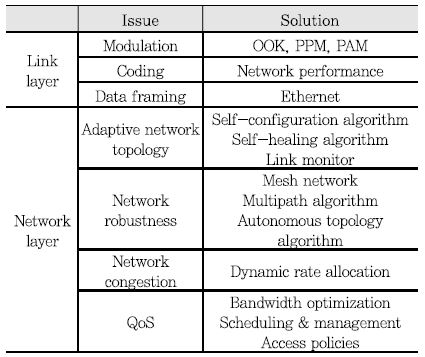
FSO 시스템 링크 및 네트워크 주요 이슈
<표 2>
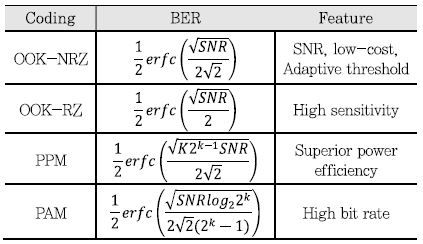
코딩 방식에 따른 BER
(그림 4)
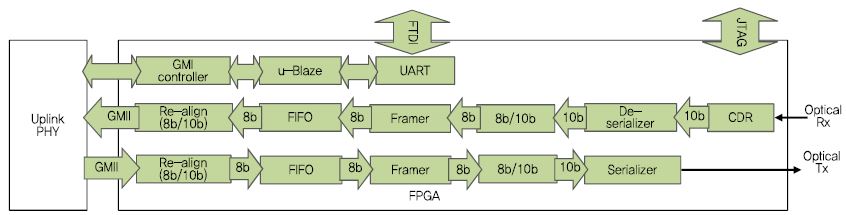
Gigabit 이더넷 FSO FPGA 설계 예시
(그림 5)
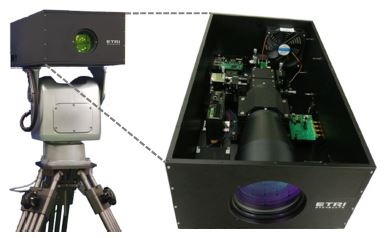
ETRI 모바일 FSO 시제품