전기가변 고분자 소재를 이용한 응용소자
Electro-active Polymer and Dielectric Elastomer Technology for Haptic Interface, Muscular Enhancement, and Tunable Optical Components
- 저자
-
윤재웅휴먼증강연구실 yjw60212@etri.re.kr 박승구휴먼증강연구실 skpark@etri.re.kr 문성철휴먼증강연구실 scmun@etri.re.kr
- 권호
- 34권 4호 (통권 178)
- 논문구분
- 일반논문
- 페이지
- 108-116
- 발행일자
- 2019.08.01
- DOI
- 10.22648/ETRI.2019.J.340411
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- Electro-active polymers and dielectric elastomers have many intriguing properties that enable smart interfaces and electrically tunable optical systems, such as haptic feedback devices, artificial muscles, and expansiontunable optical elements. These device classes are of great interest owing to their promising roles in nextgeneration technologies including virtual or augmented reality, human sensing and muscular enhancement, and artificial skins. In this report, we review basic principles, current state-of-the-art techniques, and future prospects of electro-active and dielectric elastomer technology. We describe chemical and physical properties of the most promising polymer substances, essential elementary architectures for artificial muscle-like functionalities, and their applications to haptic interfaces, muscular enhancement, and focus-tunable optical elements.
Share
Ⅰ. 서론
스마트 사용자 인터페이스 기술은 인간의 감각 및 의사소통 정보를 전자-전기 공학으로 처리 가능한 신호로 데이터화하고, 이를 각종 제어, 통신 및 서비스에 이용할 수 있도록 하는 기술로서, 차세대 전자 및 정보 산업에서 그 핵심적 중요성이 날로 높아지고 있다.
본 고에서는 전기가변 고분자 재료를 이용하는 촉각 감지 및 유발 소자와 근력 증강 및 가변형 광소자 기술에 대한 기술 동향을 설명하고, 차세대 사용자 인터페이스 기술과 관련된 향후 전망과 후속 연구의 방향을 제시하고자 한다.
특히, 전기가변 고분자 소재의 유기화학적 기본구성과 전기-유발 기계적 변형의 기본 원리를 설명하고, 이를 응용한 햅틱 기술, 근력 증강 및 가변형 광소자 기술에 대한 소개와 이들 각각의 기술 전망에 대해 논의하였다.
II. 전기가변 고분자 소재
본 장에서는 전기가변 고분자 소재를 소개한다. 외부 자극에 의해 더 많은 기계적 변형을 갖는 것을 목표로 하기 때문에 부드럽고 유연 특성이 있는 고분자 소재를 사용한다. 전기 형상가변 소재는 가변 기구에 따라 크게 2가지로 나뉜다: 이온성 전기 감응성 고분자(EAP: Electro Active Polymer), 유전성 탄성 고분자(DE: Dielectric Elastomer). EAP는 외부 전기장에 의한 이온들의 움직임 또는 확산을, DE는 Maxwell 인력에 따른 변형을 원천으로 삼는다. 이러한 관점에서 현재 개발 중인 고분자 전기 형상가변 소재를 간략히 소개한다.
1. 금속-이온 고분자 복합체
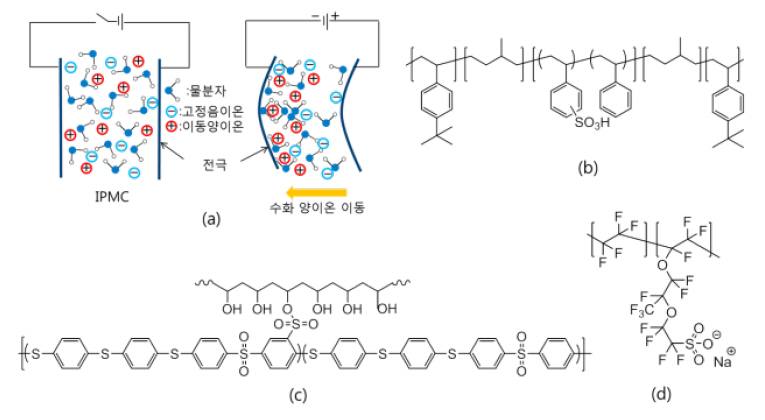
금속-이온 고분자 복합체(IPMC: Ionic Polymer-Metal Composite)는 EAP의 일종으로 전압하에서 그림 1(a)과 같이 박막 내 이온이 움직일 수 있도록 금나노 입자와 같은 높은 표면적을 갖는 전극을 필름 소재에 배치한다. 전압이 가해지면 수화 양이온이 음극에 다량 모이게 되고, 양이온과 음이온의 반데르발스 부피 차이에 기인하여 음극 필름 면이 좀 더 팽윤되며, 반대 면은 수축된다. 변형 효율은 수화된 필름의 이온의 전도성, 탄성계수 등이 영향을 주는데, 일반적으로 높은 이온 전도성, 낮은 탄성계수에서 변형량이 크다. 이온 전도성은 또한 고분자의 강직도와 관련 있어, 탄성계수 및 유리전이온도가 낮을수록 이온 전도성은 높아진다[1].
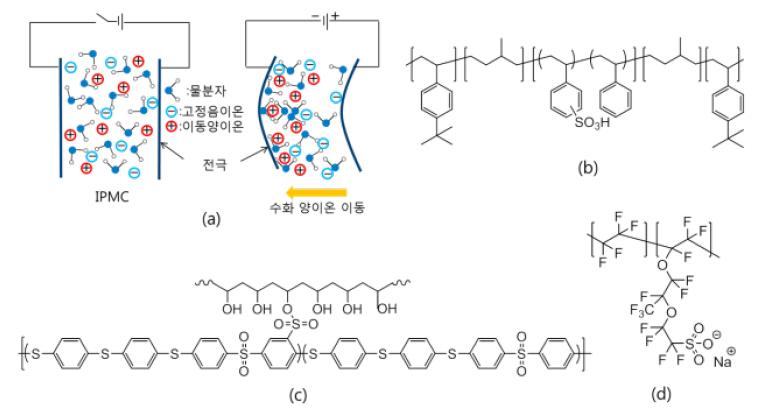
그러한 IPMC의 몇가지 예를 그림 1(b)~(d)에 보인다. 그림 1(b)의 고분자는 술폰화된 펜타 블록 공중합체로 사이크로헥산과 테트라하이드로퓨란의 공용매를 사용하므로 용매의 탄소함량이 높아 이온의 이동성이 낮으나 필름의 탄성계수가 비교적 작아(~80MPa) 변형량은 비교적 크다(2.3mm/V)[2]. 그림 1(c)의 고분자는 폴리비닐알코올(PVA: Poly(vinyl alcohol))을 술폰화 폴리아릴렌티오에테르술폰(SPTES: Sulfonated poly(arylene thioether sulfone))과 가교시켜 제조한다. 물을 60%까지 함유하고 있어 이온의 움직임은 우수하다. 하지만, PVA/SPTES 가교 고분자의 탄성계수가 비교적 높아(~140MPa) 변형율을 감소시킨다(1.25mm/V)[3].
그림 1(d)의 고분자는 Nafion®이라 불리는 상용화 제품으로 술폰화된 과불소 고분자이며, 움직이는 이온으로 나트륨 양이온을 사용한다. Nafion® 필름은 탄성계수가 높아(~270MPa) 최대 변형량은 1.7mm로 상대적으로 낮다. 이와 같이 IPMC 필름의 전압에 대한 변형량은 필름의 탄성계수가 관여하는데, 이는 전기가변 방식의 소재에서 설명하기로 한다.
2. 유전성 탄성 고분자
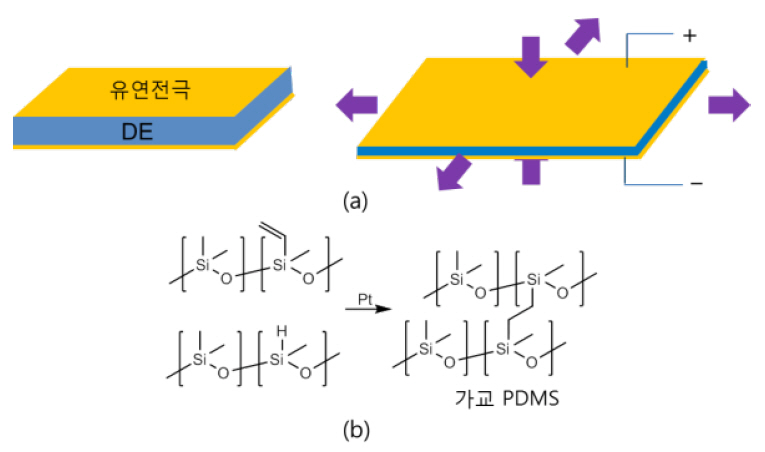
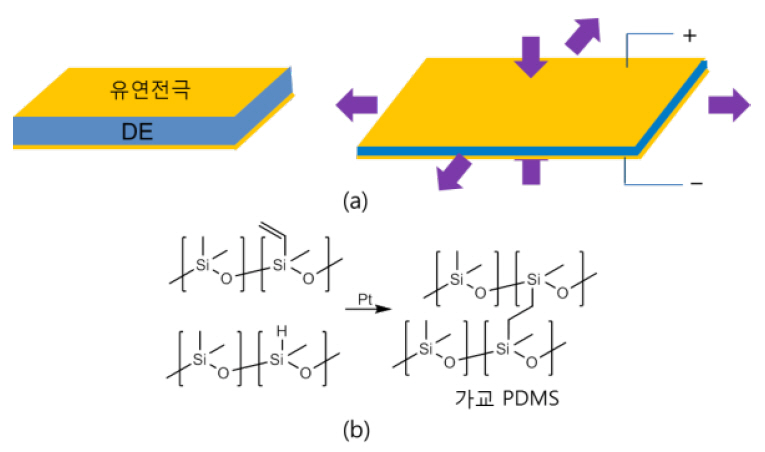
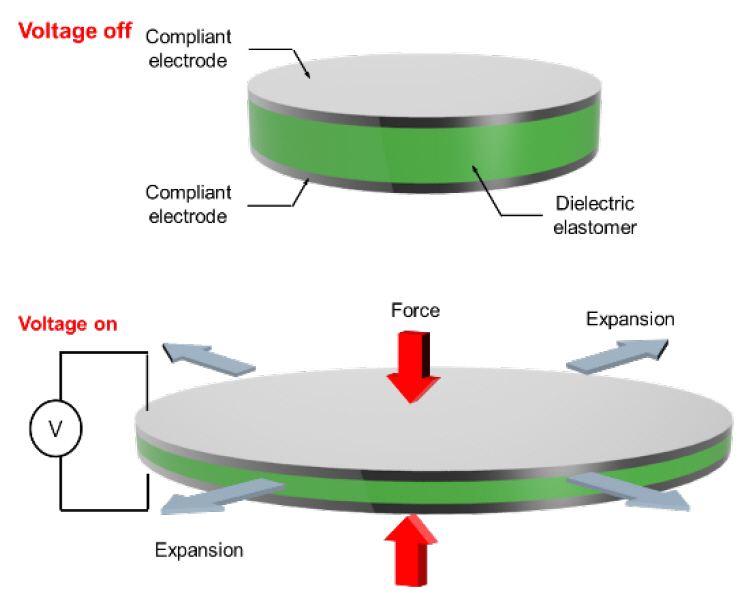
고분자 필름 소재에 그림 2(a) 처럼 위아래 표면에 전극을 형성한다. 여기에 전기장을 가하면 양극 사이에 식 (1)로 표현되는 Maxwell 인력(P)이 발생한다[4].
여기서 ɛ과 ɛ0는 각각 자유공간 및 필름 소재의 유전율, V는 가해진 전압, t는 필름의 두께이다. 이 인력의 크기가 필름의 변형을 일으키는 정도 이상이면 필름은 얇게 펴진다. 전압 인가 시 DE의 두께 변형량(Sz)은 식 (2)로 표현된다.
여기서 E는 소재의 탄성계수이다. 즉, 필름 소재의 탄성계수가 낮을수록 기타 일정 조건에서 변형량은 증가한다. 필름의 두께 변형량은 식 (2)와 같이 소재의 유전율과 탄성계수에 밀접히 관련하고 있다.
유전성 탄성 고분자(DE: Dielectric Elastomer)로 일반적인 것은 가교(PDMS: poly(dimethylsiloxane))이다. 그림 2(b) 처럼 비닐그룹을 갖고 있는 PDMS와 hydridosilyl 그룹을 갖는 PDMS 간에 백금 촉매하에서 화학적으로 분자 간 가교(hydrosilylation)가 이루어져 필름을 형성한다[5]. 상업적으로 잘 알려진 Sylgard®와 Elastosil® 실리콘 고분자 용액도 같은 방식으로 가교 필름을 형성하는 것으로 추정된다. 가교 PDMS 필름의 탄성계수는 가교도에 따라 크게 달라지나 일반적으로 수백 kPa 수준이다. 참고로 상업적으로 잘 알려진 Sylgard®와 Elastosil® 표준 필름의 탄성계수는 각각 약 800 및 150 kPa로 측정되었다. 가교 PDMS 소재의 유전상수는 비교적 낮은데(2~3 @ 1 kHz), 최근에는 가교 PDMS 필름에 전자 분극이 가능한 분자를 도입하여 소재의 유전율을 높이려는 시도도 이루어지고 있다[6].
일반적으로 EAP는 7V 이하의 비교적 낮은 전압에서 큰 변형을 일으킨다는 장점을 갖고 있지만, 시간이 지남에 따라 용매의 휘발로 필름 소재의 탄성계수가 변하고, 그에 따라 이온 전도성이 감소하여, 시간에 따라 변형량이 변하는 단점이 있다. EAP에 비해 DE는 낮은 탄성계수에도 불구하고 변형량이 작아 형상 가변을 위해서 일반적으로 수 kV 이상의 고전압을 사용하는 단점이 있으나 시간에 따른 변형 안정성이 비교적 우수하다. 각 방식의 고분자 소재의 장점을 극대화하고 단점을 개선하여 소재의 적용 범위를 확대시켜야만 관련 제품의 상용화에 더욱 접근할 수 있다.
Ⅲ. 전기가변 소재를 이용한 햅틱소자
햅틱(Haptics)은 인간의 오감 중 촉각을 매개로 하여 정보를 전달하는 연구 및 기술분야를 총칭한다. 햅틱 기술은 인간에게 물리적으로 촉감을 제공하는 햅틱 장치, 촉감을 데이터화하여 촉감 정보를 구축하는 햅틱 렌더링 기술, 인간이 촉감을 느끼는 메커니즘을 연구하는 촉감 인지 기술로 나뉜다[7,8]. 촉감을 제공하는 햅틱 장치/소자 분야는 기존의 시청각 중심의 인간/컴퓨터 인터페이스(HCI) 다각화, 가상현실(VR)/증강현실(AR) 기술 발전, 모바일 및 디스플레이 디바이스의 저변 확대에 따른 수요 증대로 빠르게 성장하고 있다. 본 장에서는 전기가변 소재를 이용하여 촉감을 제공하는 햅틱 장치/소자의 동향에 대하여 논하고자 한다.
1. 햅틱 장치
촉감을 제공하는 햅틱 장치는 근육과 관절의 움직임을 통해 근감각(역감, Kinesthetic) 정보를 전달해 주는 근감각 제공 장치와 피부 표면을 통해 질감(Tactile)을 전달해 주는 질감 제공 장치가 있다[7,8].
근감각 제공 장치는 일반적으로 힘을 발생시켜 사용자에게 촉감을 제공하므로 힘 피드백 장치(Force feedback device)라고도 하며, 힘을 생성하기 유리한 로봇팔 구조가 많다. 최근에는 착용이 가능한 장갑 형태를 비롯한 외골격계 구조가 웨어러블 장치의 발전과 더불어 다시금 주목 받고 있다.
사람이 질감을 느끼는 방법이 다양하므로 근감각 제공 장치와는 달리 힘만을 기반으로 하지 않고 전기, 공기, 진동, 마찰력, 냉온감 등을 다양한 기반으로 표면 질감을 제공한다. 초기 촉감 제공 장치는 근감각 제공 장치를 중심으로 개발 및 연구되어 왔으며, 근래의 모바일 기기와 웨어러블 산업의 발전으로 소형 액추에이터와 더 나아가 유연한 형태의 촉감 제공 장치의 개발이 요구되고 있으며, 이와 더불어 관련 질감 제공 장치 연구가 진행되고 있다.
모바일 기기에서 질감 제공 장치로 사용되었던 편심진동자는 응답시간이 길고, 관성에 의한 잔여 질감이 있었다. 이러한 단점을 극복한 선형공진모터를 개발하여 사용되고 있지만, 국부화된 질감 및 초소형화에 한계가 있으며 유연한 디바이스에 사용이 적합하지 않다.
유연한 환경이나 웨어러블 장치에서 질감을 전달하기 위하여 유연 액추에이터의 개발이 필요하다. 유연 액추에이터에 사용되는 전기활성고분자(EAP)는 외부 전기자극을 가하였을 때, 물리적 변형을 일으키는 고분자로서 구동 원리에 따라 크게 이온형(Ionic EAP)과 전기형(Electronic EAP)으로 나뉜다.
이온형은 고분자 내의 이온의 이동, 확산으로 고분자의 변형을 일으키며, 낮은 전압에도 큰 변형을 일으키지만, 동작 환경에 민감하고 응답속도가 느리다. 전기형은 외부 전기장에 의해 고분자 내부의 전자 분극의 유도된 전하에 의해 변형을 일으키며, 응답속도가 빠르고 이온형보다 발생하는 출력힘은 높지만 동작 전압이 높다[8].
전기활성고분자를 이용하여 유연한 햅틱소자를 개발하는 데 있어, 앞서 언급한 두 가지 모두 가능하지만, 동작환경 용이성과 더 높은 출력힘을 가진 전기형 EAP 가 더 적합하다. 특히, 유전 탄성체(DE: Dielectric Elastomer)는 대변형이 가능하고 유연성, 동작반복성 및 탄성률이 좋고, 제작 공정이 용이하여 유연 액추에이터의 소재로 각광 받고 있다.
2. 전기가변 소재를 이용한 햅틱소자
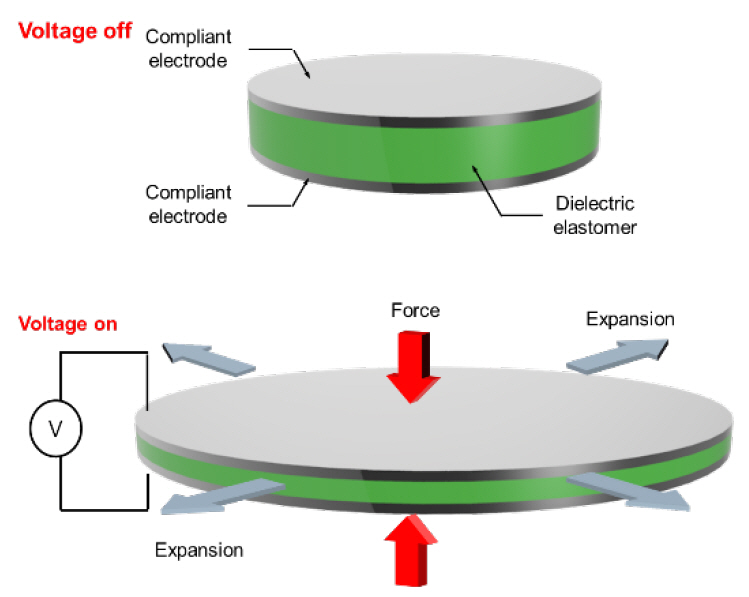
유성 탄성체를 이용하여 개발하는 햅틱소자는 우선 유전 탄성체를 얇은 필름 형태로 제조하고, 두께 방향으로 전압을 인가하도록 전극을 형성하여, 자기장을 가하면 두께 방향으로 형성된 정전기력으로 인해 유전 탄성체는 평면 방향으로 늘어나면 두께 방향으로 수축되는 특성을 이용한다(그림 3). 유전 탄성체는 탄성력이 좋고 강성이 낮고 유연하여 경계를 구속하게 되면 평면 방향의 변형을 수직 방향으로 유도 가능하며, 이러한 방향성 제어가 가능한 변형으로 질감 제공이 가능하다. 또한 응답지연 시간이 짧고, 주파수 대역이 넓어 사람이 느낄 수 있는 진동 주파수 범위(~300Hz)에서도 질감을 제공할 수 있다.
유전 탄성체는 연성 특성을 가지고 있어, 큰 변형을 발생시키지만 낮은 강성으로 사용자가 인지 가능한 충분한 질감을 제공하기에 어려움이 있다. 이와 같은 단점을 해결하고자 크게 두 가지 방법으로 연구하고 있다. 유전 탄성체를 여러 층으로 적층하여 두께를 증대시키는 방법과 강성이 높은 물질을 이용하여 유전 탄성체와 결합한 형태의 소자를 개발하는 방법이다[9-12].
유전 탄성체를 여러 층을 적층하여 전기장 인가 시 각각의 층이 같은 변형을 보이며, 촉감을 제공하기 때문에 같은 연성이라도 두께의 증대로 더 강한 촉감을 제공할 수 있으며, 뿐만 아니라 동작 전압 또한 낮출 수 있게 된다. 한국전자통신연구원에서는 6개의 유전 탄성체를 적층하여 사용자에게 돌출감과 진동 질감을 제공하는 질감 제공소자를 개발하였다.
성형성이 용이한 유전 탄성체를 이용하여 강성이 높은 물질을 결합하는 방법은 전체적인 동작은 유전 탄성체의 응답에 의해 유발되며, 질감을 제공하는 부분에 높은 강성 구조체를 삽입하여 더 강한 촉감을 제공하는 구조이다. 강성은 높은 다른 물질을 결합하는 구조이므로 유연성의 한계를 갖게 된다.
3. 향후 전망
전기가변 소재 기반 촉감 제공소자는 전기활성고분자를 이용하여 제작한다. 앞에서 언급했던 바와 같이 높은 작동전압을 낮추는 연구가 필요하다. 유전성이 더욱 높은 재료를 개발하여 같은 질감을 제공하기 위한 작동전압을 낮추거나 강성을 높이는 연구가 필요하다. 작동환경에 따라 강성이 변하는 쌍안전성 유전성 고분자 연구가 진행되고 있으나, 강성을 변하기 위해서는 열공급이 필요하며, 작동되는 응답속도가 느리다는 단점이 있다. 또한 더불어 유전 탄성체를 사이에 두고 전기장을 가해야만 동작되는 특성을 착안하여 전극 설계를 이용한 제공 장치를 개발하고 있다.
IV. 전기가변 소재를 이용한 근력증강 소자
노화, 질환 등 운동 능력 강화가 필요하거나 거동이 불편한 장애인을 도와 주는 역할을 주로 외골격계 형태의 로봇으로 개발되어 왔다. 기존의 이러한 형태의 로봇은 크고, 무겁고, 전력이 많이 들며, 일반인들이 접하기가 쉽지 않았다. 그러나 노령인구 증가와 건강의 관심 증대 및 웨어러블 장치에 대한 친밀도가 높아지면서 높은 수준의 운동 능력 강화가 아닌 저하된 운동 능력을 보조하여 삶의 질을 향상시키는 근력증강 소자에 대한 관심이 늘어나고 있다. 본 장에서는 착용이 가능한 수준의 근력증강 소자의 연구 동향을 알아보고자 한다.
1. 인공근육 소재
기존의 외골격계 로봇은 산업이나 재활 같은 큰 힘을 내고 무거운 것을 지탱하는 것을 주 목적으로 하였다. 웨어러블 장치와 같은 착용형 근력증강 보조장치로 활용하기 위해서는 기존보다 경량화가 이뤄져야 하며 유연하면서도 보다 더 정밀하게 제작되어 이질감 없이 사용 가능하여야 한다. 인공근육에 사용되고 있는 소재는 형상기억합금(SMA), 이온금속복합재(IPMC), 탄성유전체(DE), 압전고분자, 탄소나노튜브 등이 있지만, 인간의 근육 수준의 응답속도와 근력을 구현하기에는 아직 어려움이 있다[13].
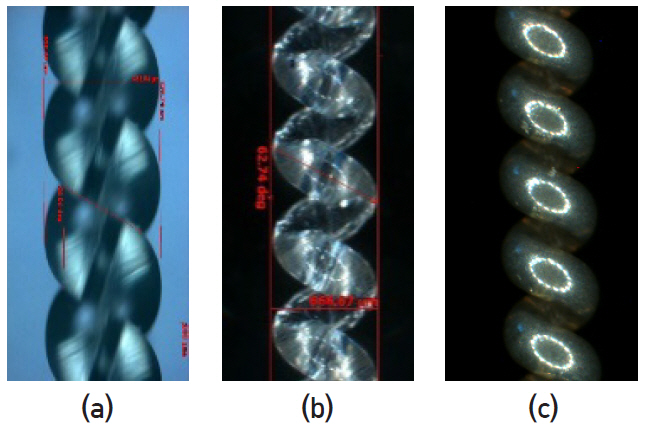
또 다른 형태의 인공근육 소재로는 2014년에 Haines 박사에 의해 소개된 3차원 구조인 코일형태의 나일론 파이버로 열을 인가하면 나일론 재질의 팽창으로 코일구조가 수축되는 특성을 가진다[13-15].
2. 연구 동향
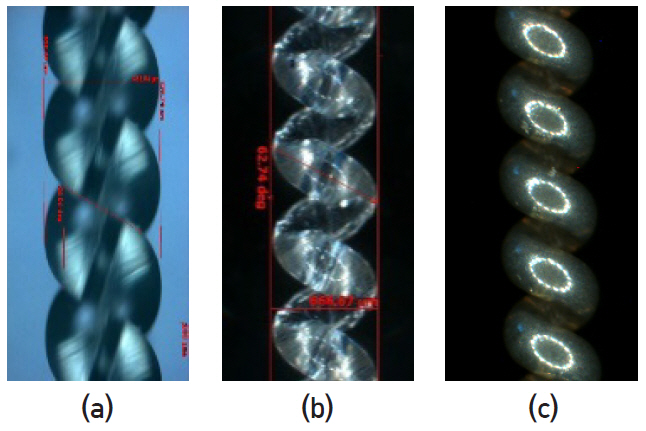
근력증강용 인공근육의 국내외 연구동향을 알아보고자 한다. 한양대에서는 거미의 거미줄 제거 거동을 접목한 폴리스리티렌/탄소나노튜브 하이브리드 yarn 기반 비틀림 변형 인공근육을 개발하였고, 한국전자통신연구원에서는 나일론의 피치를 각기 달리하여 3차원 코일 형태로 성형하여 필요한 힘에 따른 최적의 조건에 대하여 연구하였다(그림 4 참고). 또한 전기를 가하기 위한 3차원 구조에 전극을 형성을 연구하여 실버 나노와이어와 탄소나노튜브 시트를 이용하여 전기를 가하여 열에 의해 거동하는 인공근육 작동기를 개발하였다.
호주의 Wollongong 대학에서는 전기화학적 방법을 이용하여 전해진 내 이온과 탄소나노튜브 yarn과 전하 인터랙션을 발생시켜 비틀림 거동을 유도하는 기술을 개발하였다. 미국 텍사스 주립대는 고분자 섬유 및 탄소나노튜브를 이용하여 코일 구조 제작 기술을 바탕으로 강한 수축 힘을 낼 수 있는 인공근육 기술 개발하였으며[16], NiTi 형상기억합금 기반 인공근육을 개발하였다. Bell Lab에서는 하이드로젤의 수축, 팽창하는 특성을 이용하여 3차원 실리콘 나노구조의 배열 방향 재구성함으로써 나노구조 기반 인공근육을 모사하였다. Swiss Federal Lab의 스프링 구조에 롤 형태의 전기활성고분자 박막을 결합한 팽창형 인공근육 작동기를 다수의 롤 형태로 제작하여 ‘arm wrestling’을 시연하였다.
3. 향후 전망
착용 가능한 근력증강 소자는 인공근육 작동기를 병렬 연결하여 힘의 크기를 증가시키는 연구결과들이 보고되고 있지만, 기존 외골격계에 비하면 발생 가능한 힘이 현저히 낮다. 근력 보조장치로서의 근력 증강소자는 저하된 운동 능력을 보조하거나 기존의 큰 힘을 발생시키는 근력증강 소자의 큰 단점인 정밀성을 보완하는 소자로 자리매김할 것으로 예상된다. 현재 연구되는 소재의 유연성을 극대화하여 이질감 없이 착용 가능한 증강소자로 사용하기 위해서는 패치나 밴드 형태의 개발 연구가 필요할 것이며, 센서와 결합하여 피드백이 가능한 통합형 소자로의 연구로 이어질 것으로 예상된다.
V. 가변형 광소자
무기물 유전체, 반도체 및 금속 재료에 기반한 전통적 광학 매질 및 재료와 비교했을 때, 전기가변 고분자의 성형 용이성, 역학적 유연성, 전기-탄성 가변성과 광학적 투명성은 가변형 결상 렌즈나 반사체, 회절 광소자, 유연 광센서 등의 광소자를 위한 차별적 성질을 제공한다. 본 장에서는 전기가변 고분자 박막에 기반한 가변형 광소자 개발 현황을 살펴보고 후속 연구 방향과 전망에 대해 논의하고자 한다.
결상 광학계는 망원경이나 현미경과 같은 과학기기부터 휴대폰 카메라, 차량용 블랙박스, 방범/보안용 폐쇄회로 TV 등의 생활 기기, 그리고 정찰 위성 및 항공 시스템, 정밀타격 순항 미사일 등의 방위산업 영역에 이르는 광범위한 응용 분야를 가지고 있다. 이와 같은 응용 시스템에서 초점가변 기능은 피사체 평면 조절, 자동 초점, 배율 조절 등의 기능을 작동하게 만드는 필수적 요소 기능에 해당한다. 상용 시스템에서는 초점가변 기능의 구현을 위해 2개 이상의 다중 렌즈 묶음으로 구성된 결합체를 이용하고 있는데, 이는 결상광학계의 두께와 무게를 경감시켜야 하는 소형 시스템 적용에 많은 애로를 초래해 왔다.
전기가변 폴리머는 전기-전자적 제어가 용이한 정전기력에 의해 단면 및 표면의 기하학적 형태를 가역-탄성적으로 변화시키는 기반 기술을 제공한다. 전기적으로 유발되는 가역-탄성 구조변화 기술을 이용하면, 단일 렌즈 또는 반사체로 구성된 초점가변 소자를 구현할 수 있다.
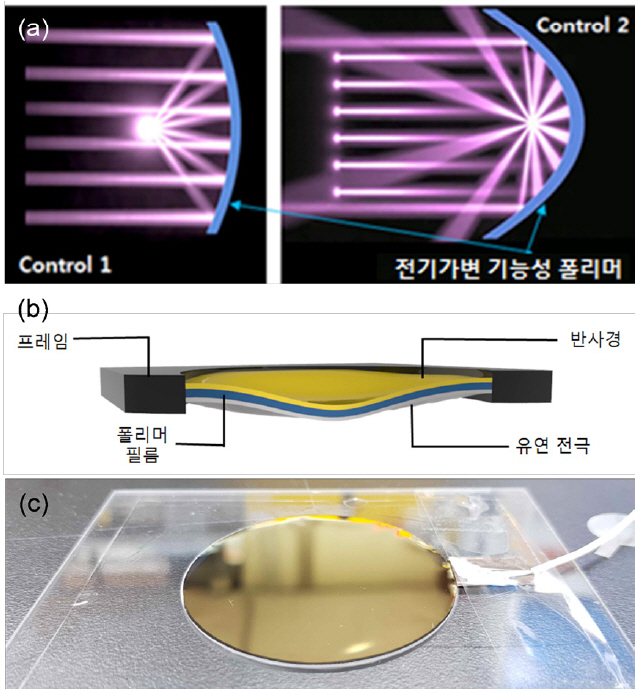
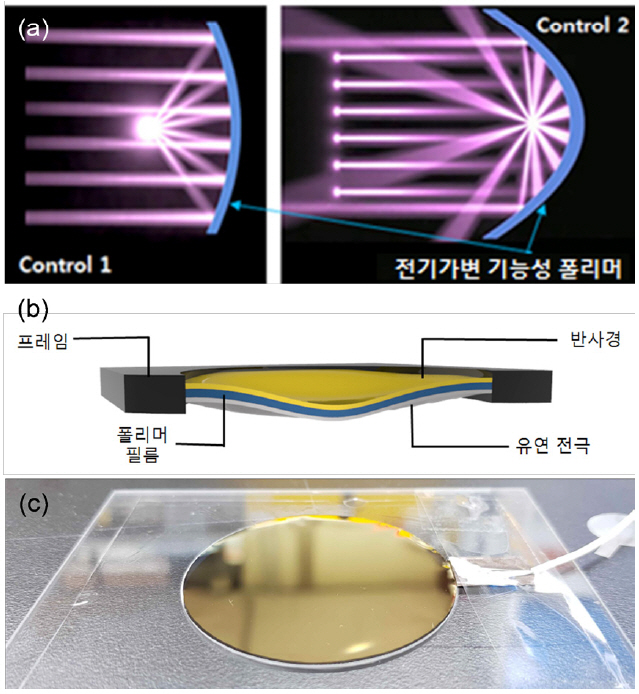
초점가변 반사체의 개념과 소자의 기본 구조를 그림 5(a)와 (b)에 각각 표시하였다. 소자의 구조는 수십~수백 마이크로미터 수준의 두께를 가지는 전기가변 박막에 하부 유연전극과 상부 도체 반사막이 축전기를 형성하도록 구성되며, 축전기 사이에 인가된 전압에 따라 박막의 접선방향 팽창률이 변화하고, 이에 따라 반사막 곡면의 곡률 반경이 인가된 정전 전압에 따라 조절되는 효과를 적절히 유발하도록 설계된다. 본 연구팀에서는 초점거리가 무한원점에서부터 10cm 이내로 조절되는 반사체 소자 구현을 위해 고분자 소재의 탄성, 유연전극(분산형 그물망 구조의 금속 나노와이어) 및 반사막(Au 박막, 두께 > 100nm) 증착 조건과 5kV 이내의 구동 전압 조건하에서 공정 최적화를 확립했다. 제작된 소자 프로토타입의 사진은 그림 5(c)와 같으며, 10,000회 이상의 반복 구동에 대해 의도했던 초점조절 성능을 신뢰성 있게 보여주었다(초점 거리 표준편차 1% 이내).
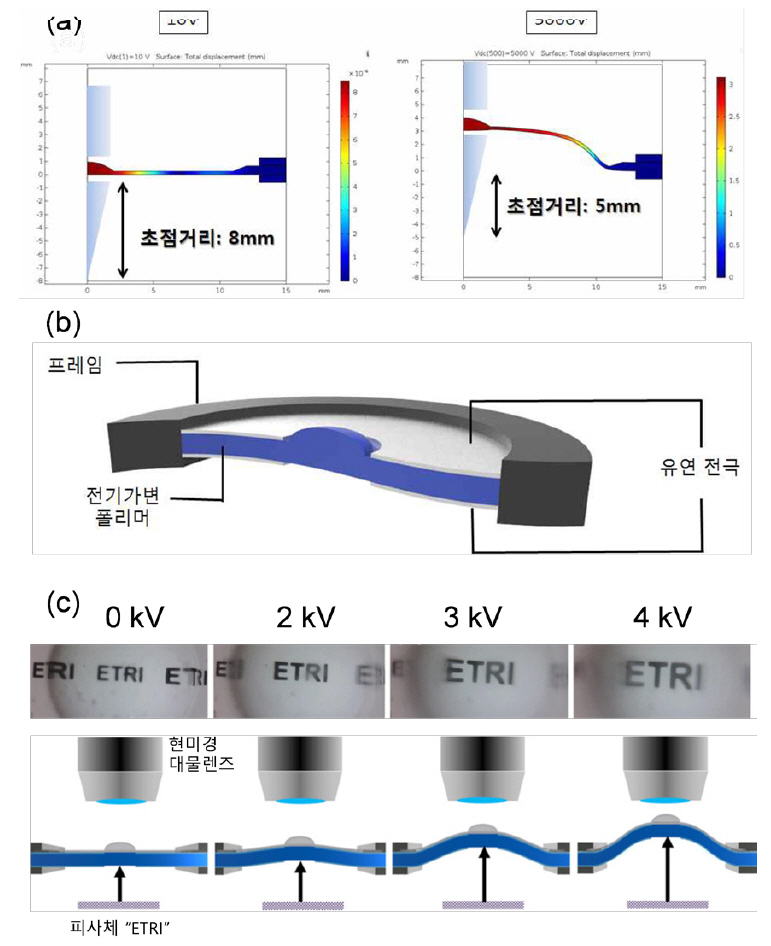
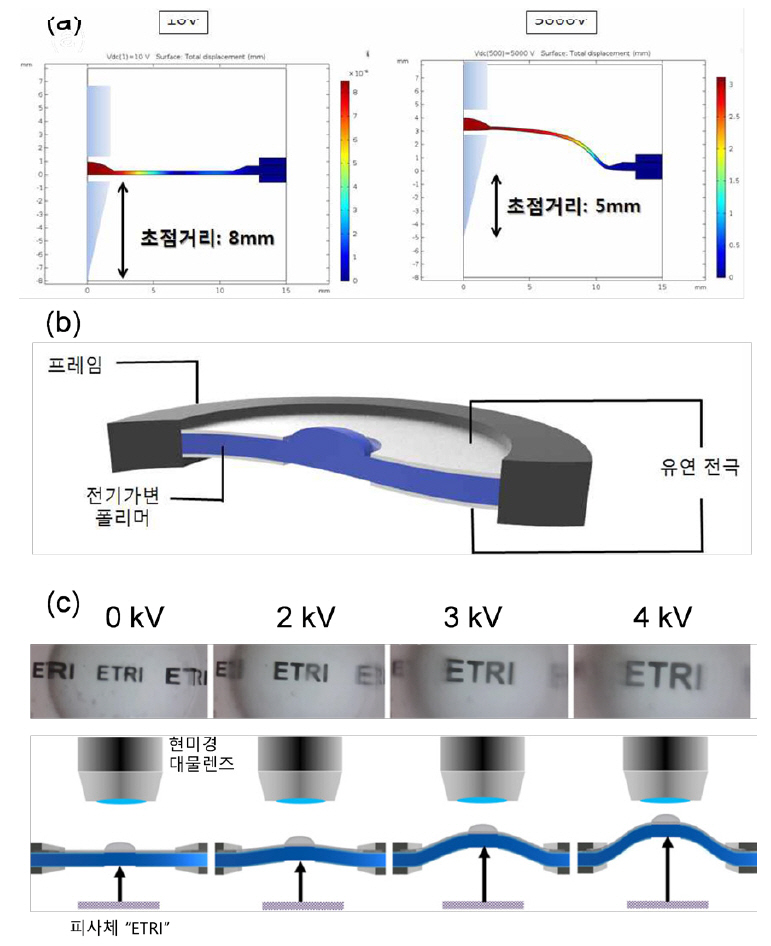
초점가변 렌즈의 동작 원리와 소자의 기본구조는 그림 6(a) 및 (b)에 나타낸 바와 같다[17]. 전기가변 박막은 렌즈 구조의 음각 몰드에 프리폴리머 혼합 용액을 도포하여 경화 처리를 통해 제작되며, 유연전극을(분산형 금속 나노와이어 그물망) 등방 평면 팽창시킨(팽창률 약 100%) 렌즈 박막의 상하부에 형성시킨 후 고리형 틀에 고정함으로써 소자가 제작된다. 그림 6(c)는 0~4 kV 구동 전압에 의해 37% 수준의 상대 초점거리 조절 성능을 나타낸 소자를 이용하여, 현미경 배율 조절을 시연한 실험결과를 보여준다. 모터 회전에 기반한 저속 액추에이터 방식이나 압전체를 이용한 종래의 방법과 비교하였을 때, 본 시연 결과는 제어 속도, 중량, 조절 범위 등의 측면에서 매우 우수하며, 상용화 시 개별 소자의 비용 측면에서도 1/10~1/100 수준으로서, 탈부착이 가능한 임의-교환식 소자 상용화도 유효하게 추진할 수 있을 것으로 기대된다.
그림 6
탄성 가변 매질을 통한 초점가변 렌즈의 (a) 동작 개념도, (b) 소자의 기본 구조와 (c) 실험 결과.
출처 Reprint from Yun et al., “A thin film active-lens with translational control for dynamically programmable optical zoom,” Applied. Phys. Lett., vol. 107, no. 8, 2015, pp. 081907:1–5.
상기 두 종류의 초점-가변형 결상 광소자와 관련하여, 국내외 기술 시장의 규모 현황과 수요는 상당히 고무적인 것으로 판단된다. 차량용 블랙박스와 폐쇄회로 카메라의 경우를 살펴보면, 2019년 현재 250억 달러 규모의 세계 시장 규모를 가지고 있으며, 매년 10%를 상회하는 성장 추이를 나타내고 있다. 여기에서, 본 기술을 응용한 피사체 거리조절 기능 추가는 사용자의 일반적 블랙박스 또는 폐쇄회로 카메라의 이용 목적에 부합하는 다양한 우수성을 가질 수 있다. 본 기술의 상용화를 위해서 공정 안정화 연구, 저전력 고전압 증폭기의 소형화, 온도-의존 특성 또는 재료탄성 변화의 동적 교정 방안, 공명 요동 제거 방안 및 패키징 공정 개발 등의 완성품 개발과 관련된 후속 연구가 필요하며, 전기가변 고분자 재료의 전기-역학 및 광학적 특성 최적화나 팽창-수축 유도 표면 형상 변화에 대한 정교한 실험 연구 등의 기초 연구도 병행되면 좋을 것이다.
VI. 결론
전기가변 고분자 소재는 햅틱 기술, 근력 강화, 가변형 광소자 등의 차세대 기술에 있어서 여러 이점을 가지고 있다. 본 고를 통해 설명했던 다양한 기능적 우수성 외에도, 실리콘-고분자 화합물로서 가지는 환경-화학적 안정성, 생체 호환성과 대량생산의 용이성 또한 기술의 산업-경제적 이전 가능성 면에서 매우 중요한 이점으로 생각될 수 있다. 따라서, 현재 다각적으로 전개되고 있는 햅틱 인터페이스 장치, 인공근육, 가변형 광소자 등의 기능적 완성도를 높이는 후속 연구뿐만 아니라 생활 밀착형 또는 사회문제 해결형 기술수요에 대한 조사와 적용연구 또한 활발히 이루어지는 것이 바람직할 것으로 사료된다. 예를 들면, 탄성변형 기반의 인공 안구 또는 능동초점 안경, 시각 장애인을 위한 햅틱 입출력 장치, 퇴행성 또는 유전성 근감소 환자를 위한 근력 보조 장치, 웨어러블 센서 또는 신호 입출력 장치 등이 유망한 연구 문제로 언급될 수 있다. 또한 앞으로 로봇 공학 분야에서 새로운 개념의 동력 장치 및 기계-변형 기제를 제시하는 창의적 연구에 대한 노력도 활발히 병행될 것으로 기대된다.
용어해설
Haptics 촉각을 매개로 정보를 전달하는 기술 및 그에 관련된 학술 분야를 총칭함
약어 정리
M. D. Green et al., "Synthesis of imidazolium ABA triblock copolymers for electromechanical transducers," Polymer, vol. 53, no. 17, Aug. 2012, pp. 3677-3686.
W. Zheng, C. J. Cornelius, "Solvent tunable multi-block ionomer morphology and its relationship to modulus, water, swelling, directionally dependent ion transport, and actuator performance," Polymer, vol. 103, Oct. 2016, pp. 104-111.
X.-L. Wang, I.-K. Oh, S. Lee, "Electroactive artificial muscle based on crosslinked PVA/SPTES," Sens. Actuators B-Chem., vol. 150, no. 1, Sept. 2010, pp. 57-64.
R. Pelrine, R. Kornbluh, Q. Pei, J. Joseph, "High speed electrically actuated elastomers with strain greater than 100%," Sci., vol. 287, no. 5454, Feb. 2000, pp. 836-839.
P. Zheng, T. J. McCarthy, "Rediscovering silicones: Molecularly smooth, low surface energy, unfilled, uv/vis-transparent, extremely cross-linked, thermally stable, hard, elastic PDMS," Langmuir, vol. 26, no. 24, Dec. 2010, pp. 18585-18590.
L. Zhang et al., "Highly improved electro-actuation of dielectric elastomers by molecular grafting of azobenzenes to silicone rubber," J. Mater. Chem. C, vol. 3, no. 19, Apr. 2015, pp. 4883-4889.
최승문, 김상연, 전석희, 김정현, "융합연구리뷰_part2가상 햅틱 장치를 통한 몰입형 VR/AR 시스템 현황 및 발전 방향," 융합연구리뷰, 제4권 제9호, 2018, pp. 1-80.
S. Mun et al., "Electro-active polymer based soft tactile interface for wearable device," IEEE Trans. Haptic, vol. 11, no. 1, 2018, pp. 15-21.
P. Lotz, M. Matysek and H. F. Schlaak, "Fabrication and application of miniaturized dielectric elastomer stack actuators," IEEE/ASME Trans. Mech., vol. 16, no. 1, 2011, pp. 58-66.
H. S. Lee et al., "Design analysis and fabrication of arrayed tactile display based on dielectric elastomer actuator," Sen. Act-A: Phy., vol. 205, 2014, pp. 191-198.
S. Biswas, Y. Visell, "Emerging material technologies for haptics," Adv. Mater. Technol., vol. 4, no. 4, Apr. 2019, pp. 1900042:1–30.
K. –J. Cho et al., "Review of manufacturing processes for soft biomimetic robots," Int. J. Precision Eng. Manuf., vol. 10, no. 3, July 2009, pp. 171-181.
D. Pyo et al., "Silver-nanowires coated pitch-tuned coiled polymer actuator for large contractile strain under light-loading," Int. J. Precision Eng. Manuf., Dec. 2018, pp. 1895-1900.
C. S. Haines et al., "Artificial muscles from fishing line and sewing thread," Sci., vol. 343, 2014, pp. 868-872.
M. D. Lima et al., "Electrically, chemically, and photonically powered torsional and tensile actuation of hybrid carbon nanotube yarn muscles," Sci., vol. 338, 2012, pp. 928-932.
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.