비지상네트워크를 위한 5G 무선통신 기술
5G Wireless Communication Technology for Non-Terrestrial Network
- 저자
-
김지형무선분산통신연구실 savant21@etri.re.kr 윤미영무선분산통신연구실 myyun@etri.re.kr 유덕현무선분산통신연구실 dhyou@etri.re.kr 이문식무선분산통신연구실 moonsiklee@etri.re.kr
- 권호
- 34권 6호 (통권 180)
- 논문구분
- 일반논문
- 페이지
- 51-60
- 발행일자
- 2019.12.01
- DOI
- 10.22648/ETRI.2019.J.340605
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- As a way to further expand and enable the 5G ecosystem, the 3rd Generation Partnership Project (3GPP) is considering the development of a 5G new radio (NR)-based non-terrestrial network (NTN). These NTNs are expected to provide ubiquitous 5G services to user’s equipment (especially, in Internet of Things/machine-type communications (IoT/MTC) public safety, and critical communications) by extending service coverage to areas not covered by 5G terrestrial networks. To this end, this NTN is developing scenarios to provide 5G services using spaceborne vehicles, such as geosynchronous and low-Earth orbit satellites, and airborne vehicles, such as unmanned aircraft systems, including high-altitude pseudo-satellites. In addition, various technologies are being studied to satisfy new requirements not considered in 5G NR, such as long propagation delay time, large cell coverage, large Doppler effect, and base station movement. In this paper, we present the scenarios, requirements, technical issues and solutions, and standardization planning for NR-based NTN in 3GPP.
Share
Ⅰ. 서론
3GPP는 Release(Rel)-15에서 최초의 글로벌 5G 새로운 라디오(NR) 표준을 완성함으로써 5G의 상업적 적용에 대한 길을 열었다. 이와 더불어, 5G의 활성화와 생태계 확장을 위해 NR의 진화 단계 중 하나로서 NR 기반 비지상 네트워크(NTN)를 고려하고 있다[1]. NTN은 광범위한 서비스 커버리지 기능과 우주/항공 플랫폼의 물리적 공격 및 자연 재해에 대한 취약성 감소로 인해 지상 5G 네트워크가 서비스되지 않은 지역(고립된 또는 외진 지역, 항공기 또는 선박에 탑승) 및 서비스가 취약한 지역(교외나 시골 지역)에서 비용에 효율적인 방식으로 5G 서비스를 제공할 수 있다. 또한 M2M 및 IoT 장치 또는 이동 플랫폼(항공기, 선박, 고속열차, 버스 등)에 탑승한 승객에게 서비스 연속성을 제공하거나 미래의 철도, 해상, 항공 통신과 같은 주요 통신에 대해 어디서나 이용할 수 있는 신뢰도가 높은 5G 서비스 지원을 가능하게 만든다. 이와 함께, 네트워크 가장자리 또는 사용자 터미널로의 데이터 전달을 위한 효율적인 멀티캐스트/브로드캐스트 리소스를 제공하여 5G 네트워크의 가용성을 지원할 수 있다. 이러한 이점들은 단독으로 운영되는 NTN 또는 지상과 비지상의 통합 네트워크를 통해 제공될 수 있으며, 운송, 공공 안전, 미디어 및 엔터테인먼트, eHealth, 에너지, 농업, 금융, 자동차 등의 분야에서 영향을 미칠 것으로 기대된다.
3GPP RAN 워킹 그룹(WG)의 NR 기반 NTN 표준화 연구는 2017년 3월 RAN plenary 회의인 RAN#75에서 RAN plenary와 RAN1에 대해 Rel-15 스터디 아이템(SI)으로의 승인을 통해 시작하였다[2]. 해당 SI의 목적은 NTN의 채널 모델 개발 및 NTN 시나리오와 이에 따른 NR의 영향에 대한 연구이며, 38.811의 기술 보고서(TR)로 정리되었다[3]. 이를 기반으로 NTN 표준화가 필요한 규격 이슈에 대해 Rel-16 아이템으로 제안하였으며, 2018년 6월 RAN#80 회의에서 Rel-16 SI로 승인되었다[4]. 해당 SI는 RAN 산하 RAN1, 2와 3에서 NTN을 위한 NR 프로토콜의 필요한 기능을 연구하는 것으로 2020년 3월까지 38.821의 TR 작성과 함께 연구될 예정이다[5]. 이와 함께, SA 산하 SA1에서 Rel-16 SI로써 위성 접속에 대한 요구사항을 2017년 9월부터 2018년 6월까지 TR 22.822로 연구하였으며[6], 2018년 12월에 완료된 기술규격(TS) 22.261에 5G 시스템의 요구사항으로 반영되었다[7]. SA 산하 SA2에서는 2018년 6월부터 2019년 9월까지 5G에서 위성 접속에 대한 아키텍처 연구가 TR 23.737로 연구되었으며[8], SA5에서는 5G 네트워크에서 통합 위성 구성 요소의 관리 및 오케스트레이션에 대해 2019년 3월부터 12월까지 TR 28.808로 연구될 예정이다[9].
본 고에서는 TR 38.811[3]과 38.821[5]를 기반으로 앞서 설명한 NR 기반 NTN의 표준화 연구에 대한 기술 현황 및 향후 표준 방향에 대해 소개한다.
Ⅱ. NTN 시나리오
현재 3GPP에서 논의되고 있는 NTN은 위성과무인 항공 시스템(UAS) 등을 포함한 다양한 항공/우주 플랫폼 중 대표적인 요구사항을 지닌 정지궤도 위성(GEO)과 저궤도 위성(LEO)에 대해 논의를 집중하고 있으며, 구체적인 시나리오는 그림 1 및 표 1과 같다[5].
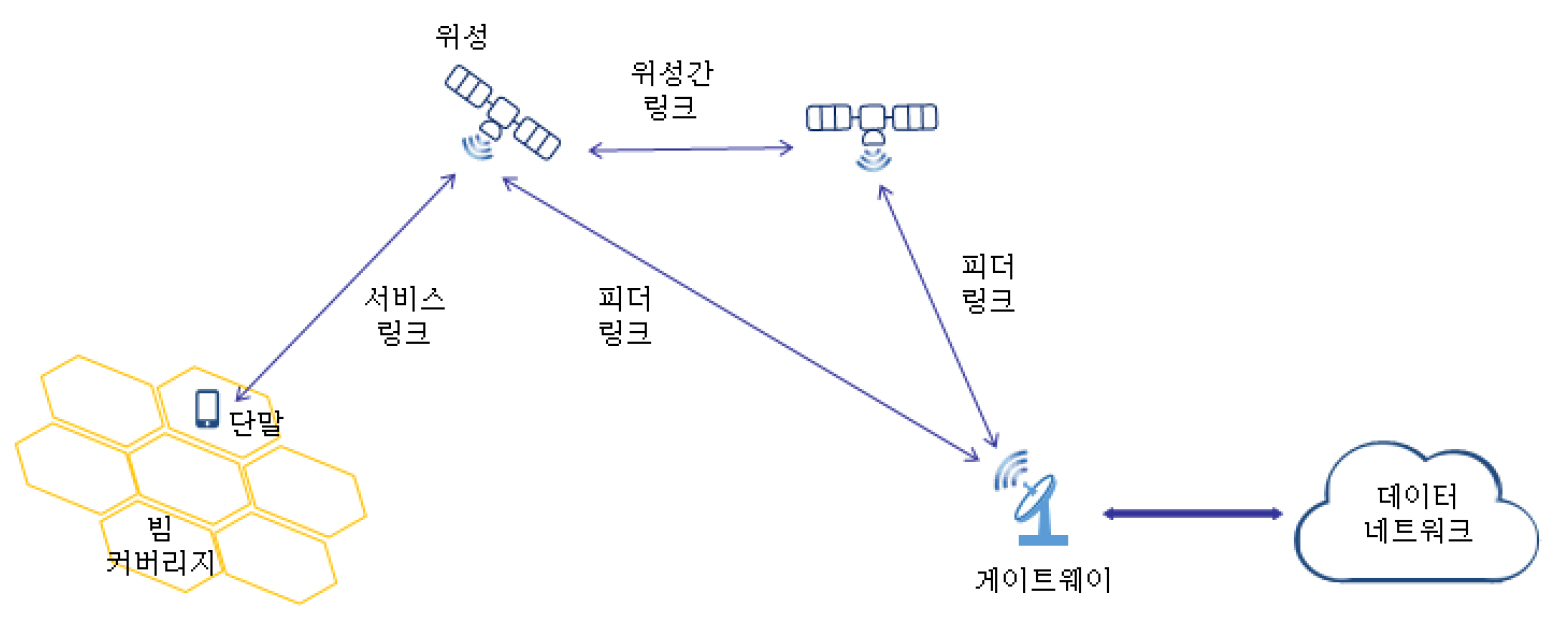
표 1 NTN 시나리오
| Transparent 위성 | Regenerative 위성 | |
|---|---|---|
| GEO 기반 | 시나리오 A | 시나리오 B |
| LEO 기반: 고정 빔 | 시나리오 C1 | 시나리오 D1 |
| LEO 기반: 이동 빔 | 시나리오 C2 | 시나리오 D2 |
그림 1에서 서비스 링크는 단말과 위성 사이의 링크이며 3GPP에서 정의하는 NR에 기반한다. 피더 링크는 위성과 게이트웨이 사이의 링크이며 3GPP 또는 3GPP가 아닌 라디오 인터페이스를 적용할 수 있다. 위성 간 링크(ISL)는 주로 regenerative 위성의 경우 적용될 수 있다. NR-RAN 아키텍처에 기반한 transparent 위성의 경우 피더링크와 서비스링크의 위성 라디오 인터페이스는 NR-Uu이다. Transparent 위성의 경우 위성은 무선 주파수 필터링과 주파수 변환 및 증폭 기능을 수행한다. Regenerative 위성의 경우 위성에 온보드(on board) 기능이 구축되어 무선 주파수 필터링, 주파수 변환 및 증폭뿐만 아니라 스위치와 라우팅, 코딩과 변조 및 디코딩과 복조와 같은 일부 또는 전체 기지국 기능을 수행한다. 위성은 일반적으로 서비스 지역에 걸쳐 다중 빔을 생성한다.
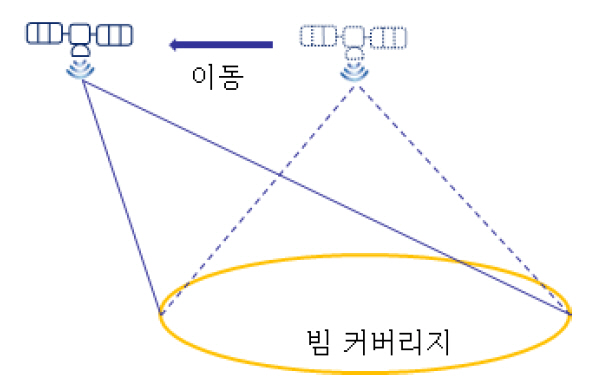
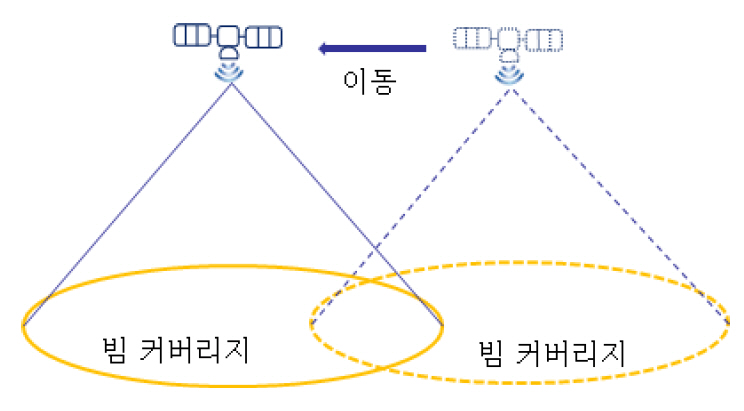
표 1에서 GEO는 35,786km의 고도에서 임의의 지구 위치에 대해 고도/방위로 고정된 위치를 유지한다. LEO의 경우 300~1,500km의 고도에서 지구 주위를 회전한다. 고정 빔의 경우 그림 2와 같이 위성은 빔포밍 기술을 적용하여 지구상의 고정 지점으로 빔을 조정할 수 있다. 이는 위성의 가시성 시간에 해당하는 기간 동안 임의의 고정 지점에 대한 서비스를 가능하게 한다. 이동 빔의 경우 그림 3에서 보듯이 위성의 빔은 위성과 함께 이동한다.
각 시나리오에서 고려하는 GEO와 LEO의 주요 파라미터는 표 2와 같다. 표 2에서 최댓값과 최솟값을 설정하는 이유는 서비스 지원을 위해 최악의 환경에 대한 연구가 필요하기 때문이다.
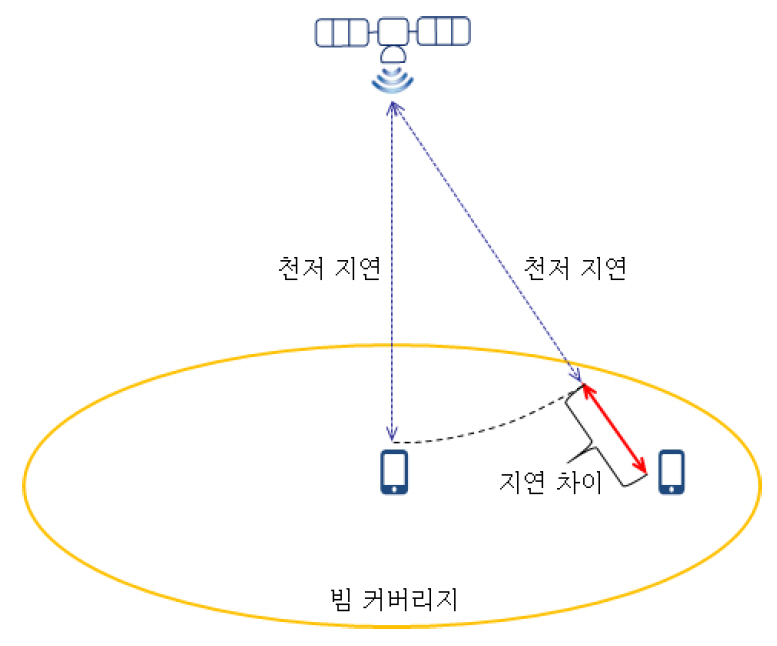
표 2에서 최대 빔 직경은 GEO와 LEO에 대해 각각 3,500km와 1,000km로써 여기서의 빔은 위성빔을 나타낸다[10]. 위성의 빔 직경이 큰 경우 하나의 위성의 빔당 하나의 셀로 가정할 수 있다. 최소 고도각은 10。로 해당 고도각까지 서비스 지원을 가정한다. 최대 왕복 지연시간(RTT)은 transparent 위성의 경우(시나리오 A와 C) 단말과 위성(서비스 링크), 그리고 위성과 게이트웨이(피더 링크)를 포함한 RTT를 나타낸다. Regenerative 위성의 경우 서비스 링크만 고려함으로써 해당 RTT는 절반으로 줄어든다. 최대 지연 변화는 위성 커버리지 내의 단말들에 대해 최소 단방향 지연시간과 최대 단방향 지연시간(10。고도각)의 차이를 나타낸다. 최대 지연 차이는 그림 4에서 보듯이 최대 빔 직경의 단말들에 대해 천저(nadir)에서의 지연시간과 최대 단방향 지연시간의 차이를 나타낸다. 최대 도플러 시프트는 위성의 이동으로 인한 최대 도플러 시프트값이며, 최대 도플러 시프트 변화는 초당 변화하는 도플러 시프트 변화값이다. 단말의 최대 지연 변화는 위성이 단말을 향하거나 단말로부터 멀어질 때 RTT가 시간에 따라 얼마나 빨리 변하는지를 의미하며, transparent 위성의 경우(단말-위성-게이트웨이)에 대한 값으로 regenerative 위성의 경우 해당값은 절반으로 줄어든다. GEO의 경우 기본적으로 고정되어 있기 때문에 단말의 이동으로 인한 상황을 제외하고 도플러와 연관된 값들에 대한 영향은 무시할 수 있다. LEO의 경우 지구 대비 위성의 상대 속도를 7.56km/s로 가정함으로써 도플러의 영향이 뚜렷하게 나타난다.
Ⅲ. NTN의 NR 영향과 기술 이슈
앞서 기술한 바와 같이 NTN은 긴 지연시간과 큰 빔 커버리지 및 지연 차이, 기지국의 이동과 큰 도플러 시프트와 같은 지상 네트워크(TN)에서 고려하지 않은 다양한 요구사항들이 나타난다. 본 절에서는 이러한 요구사항들이 NR에 미치는 영향 및 이에 대처하기 위한 방식들에 대해 살펴본다.
1. 동기
가. 하향링크 동기
NR에서 단말은 기지국과의 하향링크 동기를 위해 동기신호(SSB)를 활용한다[11]. 표 2에서 보듯이 LEO 위성의 경우 빠른 이동으로 인한 높은 도플러 시프트값이 발생하며 하향링크 동기에 대한 성능 영향 평가가 필요하다. 현재 표준회의에서는 기지국 또는 단말에서 도플러 시프트의 사전 또는 사후 보상을 적용하는 것에 대해 논의하고 있다. 전송 또는 수신 데이터에 대해 도플러 시프트값을 사전 또는 사후 보상함으로써 데이터 복구 시 잔여 도플러의 영향만 받을 수 있으며, 이를 적용하여 하향링크 동기 추정 시 NR의 SSB를 그대로 활용하는 것도 하나의 방안으로 고려하고 있다.
나. 상향링크 타이밍 어드밴스(TA)
NR에서 상향링크의 데이터 전송 시 기지국과의 동기를 맞추기 위한 TA 조정을 위해 기지국이 단말에게 해당 TA값을 전송한다. 이는 초기 접속과 TA 갱신 시 적용되며 NR 셀의 커버리지를 고려하여 가능한 TA 범위가 설정된다. 초기 접속과 TA 갱신 시 조정이 가능한 최대 TA값은 표 3과 같다[12,13].
표 3 최대 TA 조정값
| 부반송파 간격 (kHz) | 초기접속 (ms) | TA 갱신 (ms) |
|---|---|---|
| 15 | 2.00 | 0.017 |
| 30 | 1.00 | 0.008 |
| 60 | 0.50 | 0.004 |
| 120 | 0.27 | 0.002 |
| 240 | 0.15 | 0.001 |
표 2와 3에서 보듯이 초기접속 시 NR의 최대 TA 조정값은 2ms이고, NTN의 경우 최대 541.46ms를 고려해야 하므로 이에 대한 방안이 필요하다. TA 갱신에 대해서도 LEO의 경우 40μs/s로 변화할 수 있고 기차나 비행기와 같은 단말의 이동속도(각각 500km/h과 1,200km/h)도 고려하기 때문에 특히 부반송파 간격이 큰 경우에 대해서 대처가 필요다. 현재 표준회의에서 초기 접속 시의 TA값에 대한 고려사항으로 공용지연시간에 대한 도입이 논의되고 있다. 공용지연시간은 방송되는 정보로서 해당 빔 커버리지 내에 모든 단말에게 적용되는 특정 지연시간값이다. 이 경우 기지국은 임의의 단말에 대해 공용지연시간과 실제 지연시간과의 차이값을 TA 조정값으로 설정할 수 있다. 이와 함께, 단말의 위치 정보와 위성 천문력을 통한 위성의 좌표를 활용하여 TA를 단말이 추정하는 방법도 고려할 수 있다.
다. RACH 절차
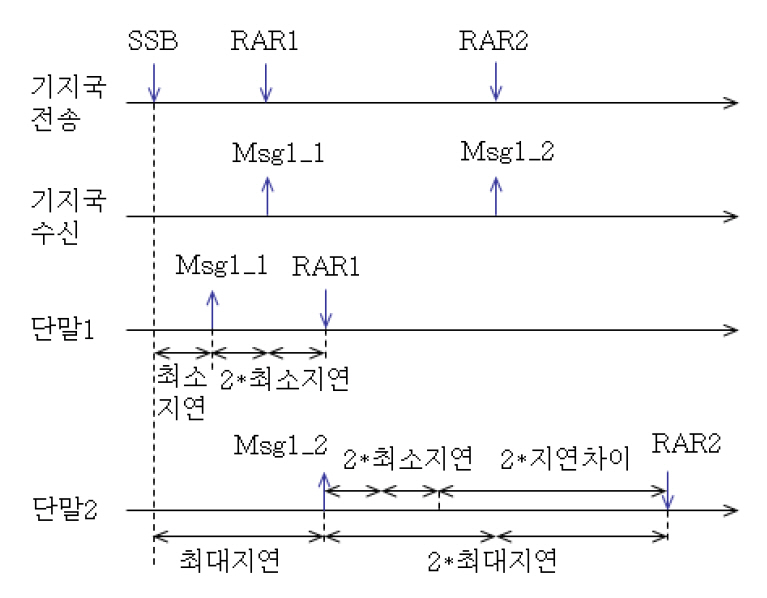
NR에서 상향링크 동기 설정을 위해 단말은 기지국에 해당 RACH 기회에 대해 RACH 프리앰블을 전송하며, 기지국은 프리앰블을 수신 후 TA 추정을 통해 단말과의 동기 설정에 활용한다[11,12]. 각 단말은 기지국과의 지연시간 차이에 따라 서로 다른 시간에 RACH 프리앰블을 전송하고, 기지국은 다수의 RACH 프리앰블을 각각 검출하기 위해서 여러 시나리오에 따른 다양한 RACH 프리앰블 포맷과 RACH 프리앰블 모니터링 기간이 설정된다. 가장 긴 RACH 프리앰블 포맷은 0.68ms 정도의 단말 간 지연 차이를 수용할 수 있다. NTN의 경우 표 2에서 보듯이 최대 지연 차이는 10.3ms로써 이에 대한 대처가 필요하다. 또한 최대 지연 차이와 큰 RTT는 RACH 기회 할당 간격, 단말의 랜덤 액세스 응답(RAR) 윈도우 기간 및 랜덤 액세스 충돌을 대응하기 위한 Msg4의 윈도우 기간(4-step RACH의 경우)에 대해서도 확장이 필요하다. RACH 기회 할당 간격 등은 빔 커버리지 내에서의 RACH 수용량에도 영향을 미치기 때문에 함께 고려될 수 있다. RAR 윈도우 기간과 Msg4 윈도우 기간에 대해서는 각각 프리앰블 전송 후와 Msg3 전송 후의 시작 시간에 대해 오프셋을 적용하는 것을 고려할 수 있다. 그림 5는 RAR 윈도우에 대한 예를 보이고 있다[14]. 각 단말에 대해 최소한 최소 지연의 RTT 뒤에 RAR 윈도우가 시작하며 지연차이만큼 윈도우 기간이 확장될 수 있다. 이에 따라 RAR 윈도우 시작시점에 대해 최소지연의 RTT 오프셋이 고려될 수 있다.
한편, 4-step RACH의 경우 큰 RTT로 인해 접속 시간이 길어지게 됨으로써 NTN에서는 2-step RACH의 적용도 고려하고 있다[15].
2. 지연에 강인한 재전송 방식
NR에서는 데이터 신뢰도 향상을 위해 HARQ 재전송 방식을 적용하며, 최대 16개의 HARQ 프로세스 수를 지원한다[16]. NTN에서는 큰 RTT로 인해 HARQ 프로세스 수 등 HARQ 방식에 대한 대처가 필요하다. 1ms 슬롯 길이와 15kHz 부반송파 간격에 대해 요구되는 최소 HARQ 프로세스 수는 표 4와 같다[3]. 이는 그림 6에서 보듯이 기지국이 데이터에 해당하는 전송 블록을 전송하고 단말로부터 해당 ACK/NACK을 수신 후 새로운 전송이나 재전송을 하는 최대 기간에 기반한다.
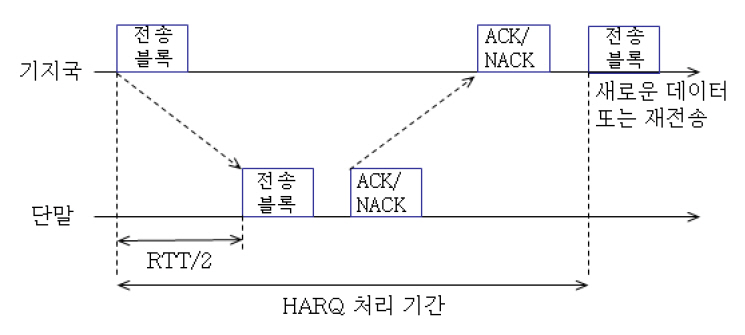
표 4에서 보듯이 16보다 큰 HARQ 프로세스 수가 요구되며, 이에 따라 적정한 크기의 HARQ 프로세스 수를 논의하고 있다. HARQ 프로세스 수를 확장하기 위해서는 하향링크 제어 정보(DCI) 크기나 HARQ 소프트 버퍼 크기도 고려할 필요가 있다. 또한, HARQ 프로세스 수를 확장하는 것은 한계가 있기 때문에 HARQ 비활성화(disabling) 방식의 도입을 고려하고 있다. HARQ 비활성화는 NR의 HARQ 절차를 준수한다. 다만, 단말은 ACK/NACK을 전송하지 않으며 기지국은 단말의 ACK/NACK을 보고받지 않는다. HARQ 비활성화는 단말당 그리고 HARQ 프로세스당 적용이 가능할 수 있다. HARQ 비활성화인 경우에 전송의 신뢰도를 높이기 위해 NR의 슬롯 병합(aggregation) 방식, 낮은 변조 및 코딩 방식(MCS), 그리고 라디오 링크제어(RLC) 계층에서의 재전송 방식[17] 등이 함께 고려될 수 있다.
3. 물리계층 제어 절차
NR에서는 셀의 용량 및 단말의 성능(Capability)을 고려하여 기지국의 제어에 따른 다양한 단말의 피드백 및 전송 시간이 설정된다[12]. 기지국이 제어를 위해서는 단말의 피드백 정보가 유효한 시간내에 적용되어야 하며, 또한 단말이 기지국의 제어정보를 인식하는 시간과 기지국의 제어 정보에 따라 단말이 데이터를 전송하는 데 할당된 자원의 시간이 보장되어야 한다. 해당 설정에는 기지국과 단말의 지연시간과 단말의 성능이 영향을 미치게 된다. 결과적으로 큰 RTT를 가지거나 빠르게 이동하는 시나리오를 포함하는 NTN의 경우 상향링크 전력제어의 개방 루프와 폐쇄 루프 방식, 빔 스위칭 메커니즘 및 빔관리용 참조신호(CSI-RS), 적응형 변조 부호화(AMC)/채널 상태 정보(CSI) 피드백, 도플러 시프트 보상 등에 대한 요소들이 검토될 필요가 있다. AMC의 경우 예측 기반의 보고 및 링크 적응 방식과 장기적 페이딩 특성만 반영한 채널 품질 지시자(CQI) 적용 방식 등이 고려되고 있다. 도플러 시프트의 경우 개방 루프 도플러 시프트 보상이 논의되고 있으며, 상향링크의 전송 타이밍에 대해서 스케줄링 오프셋을 고려하고 있다. 스케줄링 오프셋은 빔 커버리지 내의 모든 단말에게 적용되는 정보이며, 스케줄링 DCI에 따른 상향링크 제어 채널(PUCCH)의 ACK 전송 시간, 상향링크 데이터 채널(PUSCH)의 전송 시간, PUSCH에서의 CSI 전송 시간, 단말의 CSI 보고를 위한 CSI-RS 수신 시간과 같은 NR의 스케줄링 타이밍 설정에 추가되는 값이다.
4. 모빌리티 증진
NTN의 경우 특히 기지국의 이동에 따라 트래킹 영역을 매핑하는 방식에 대한 고려가 필요하다. LEO에서 이동 빔(시나리오 C2와 D2)의 경우 트래킹 영역을 이동 빔과 함께 움직이는 이동 트래킹 영역과 고정된 트래킹 영역의 두 가지 경우를 고려할 수 있다.
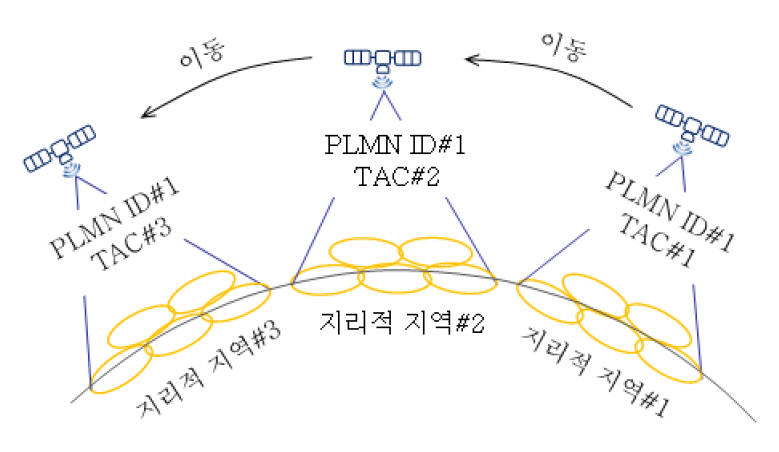
이동 트래킹 영역의 경우 빔(또는 셀)이 이동함에 따라 트래킹 영역이 지면에서 이동한다. 이는 고정 단말의 경우 유휴 모드(idle mode)에서 트래킹 영역 업데이트(TAU)를 계속 수행해야 하는 일을 야기한다. NR의 TAU 경우 4-step RACH 절차와 RRC 메시지 교환이 필요하다[18,19]. 따라서 모든 유휴 모드의 단말이 LEO 위성이 지나갈 때마다 TAU를 수행하는 경우 네트워크에서 수용하기 힘든 오버헤드가 될 수 있다. 트래킹 영역이 큰 경우에는 업데이트 시간은 줄어드는 반면 임의의 단말에 대해 모든 셀을 통해 페이징 될 필요가 있을 수 있기 때문에 네트워크 호출 시 페이징 용량이 문제가 될 수 있다. 고정된 트래킹 영역의 경우 그림 7에서 보듯이 셀이 이동하면서 다음 트래킹 영역에 도달하면 방송하는 트래킹 영역 코드(TAC)를 변경한다[5]. 단말은 이전에 등록한 TAC 목록에 없는 새로운 TAC를 검출하는 경우 이동성 등록 업데이트 절차를 트리거한다. 단말은 PLMN ID와 TAC가 결합된 트래킹 영역 식별자(TAI)를 수신하고 방송되는 TAC 및 PLMN ID가 등록 영역 밖으로 이동할 때 해당 TAC 및 PLMN ID를 기반으로 등록 영역 업데이트 절차를 트리거할지 결정한다. 이 방식은 NR 네트워크 절차를 사용할 수 있게 하며, 단말의 위치 정보 파악 성능과 상관없이 적용될 수 있다.
이와 함께, 접속 모드의 경우 GEO의 RTT를 수용하기 위한 개선 방법과 LEO의 측정값의 유효성, 이동 방향, 동적 인접 셀 집합 등에 대한 이동성 관리 절차 개선 방법에 대해 논의하고 있다. 이를 위해 측정 기반과 위치 기반, 그리고 시간 기반 등의 조건부 핸드오버 방식 및 그룹캐스트(groupcast)와 2-step RACH 기반 등의 핸드오버 방식이 고려되고 있다.
5. 서비스 연속성
5G 시스템은 NTN과 TN과의 서비스 연속성 지원을 고려하고 있다. NTN과 TN은 서로 다른 두 주파수 대역 또는 동일한 주파수 대역에서 작동할 수 있다. 따라서 단말의 연결이 NTN에서 TN 그리고 TN에서 NTN으로의 변경에 대해 주파수 간 및 주파수 내 서비스 연속성과 이동성 절차를 고려하고 있다. 이에 대해 단말의 전력 소비를 최소화 하는 관점에서 접근하고 있으며, TN 커버리지의 가장자리를 수신 신호 세기(RSRP 또는 RSRQ) 임계값과 PLMN ID를 기반으로 탐지함으로써 NTN과의 연결 여부에 대해 논의하고 있다. 단말의 위치 정보를 적용하는 방식 및 단말이 NTN 셀에 의해 서비스 받는 경우 TN 커버리지를 검출하기 위한 시도의 주기성도 함께 고려한다.
6. 성능 평가
3GPP 표준회의에서는 NTN 환경에서 NR을 바로 적용하는 경우의 성능 분석 및 새로운 방식들에 대한 성능 평가를 위해 링크버짓과 함께 시스템 레벨 시뮬레이션(SLS)과 링크 레벨 시뮬레이션(LLS)이 진행되고 있다. 이를 위해 NR에서 논의되지 않았던 위성 빔에 대한 빔 레이아웃, 주파수 재사용 계수, 피더 링크의 영향에 대한 반영 등 위성 관련 파라미터를 설정하였다. 빔 레이아웃은 랩 어라운드(wrap-around) 방식을 적용하기 위한 이웃 빔 간격에 대한 설정 방식 등을 포함한 파라미터가 설정되었고, 주파수 재사용 계수는 편파 재사용과 함께 1부터 4까지 고려한다. 피더 링크에 대한 손실과 관련해서는 지연 파라미터를 고려하며 그 외 파라미터(추가적인 주파수 에러, SNR 손실 등)는 상황에 따라 적용한다. 또한 다양한 시나리오의 조합이 가능한 만큼 시골(rural) 환경에서 단말 타입에 따라 휴대형(handheld)에 대해서는 S-밴드 그리고 초소형 지구국(VSAT)에서는 Ka-밴드 대역에서 평가하는 것에 우선순위를 두고 있다. LLS에 대해서 위성 잡음, 도플러 시프트, 도플러 레이트 등 위성 이동과 탑재에 따른 손실 파라미터를 결정하고, 하향링크 동기, PRACH 프리앰블, 데이터 전송에 대한 성능 평가를 위한 파라미터를 설정하였다. 여기서 사전 또는 사후 도플러 시프트 보상과 연관한 주파수 오프셋 파라미터도 설정되었다.
NTN의 채널 모델은 기본적으로 NR에서 적용하는 지상 네트워크의 채널 모델과 유사하다. 그러나 위성으로부터의 확산 각도는 긴 거리로 인해 거의 제로에 가까우며 고속의 이동속도를 지원한다. 또한 플랫(flat) 페이딩 모델과 도시 및 시골 고속 페이딩 파라미터에 대한 클러스터 수, K 계수와 클러스터 각도 스케일링 계수 등이 반영되었다. 이와 함께 섬광, 비 및 구름 감쇠와 같은 대기 영향과 위성 모션으로 인한 도플러 주파수 시프트, 위성 안테나 이득 패턴, 패러데이 회전 등에 대해 정의되었다.
Ⅳ. 향후 표준 방향
3GPP NTN 표준화는 GEO와 non-GEO를 포함한 위성과 성층권 비행체(HAPs)를 포함한 UAS를 고려하지만, 다양한 요구사항과 제한된 시간으로 인해 GEO와 이동 빔의 LEO, 그리고 하나의 셀에 대해 다중 빔보다는 단일 빔 시나리오에 대해 초점을 맞추고 있다. 또한 앞서 기술한 대로 새로운 기술적 이슈들에 대해 NR의 규격 영향을 최소화하는 관점에서 접근하고 있다. 이와 함께 NTN의 요구사항을 만족시키기 위해 Rel-15 NR 외에도 Rel-16 NR의 NTN 적용도 고려하고 있다. 여기에는 빠른 랜덤 액세스를 위한 2-step RACH[15], 단말의 위치 정보 파악을 위한 NR 포지셔닝(positioning)[20], 기지국의 중앙 유닛(CU)과 분산 유닛(DU)의 분리 및 ISL 링크를 고려한 IAB[21], 모빌리티 증진을 위한 측정 등이 있다.
2020년부터 시작하는 Rel-17 표준화에 NTN은 규격화 작업을 위해 워크 아이템(WI) 단계로 진입하기 위한 논의를 진행하고 있다. Rel-17 NTN의 표준화 범위로는 앞서 기술한 기술 이슈들의 규격화 작업과 더불어 셀 위상 동기화, 빔 관리 및 스위칭, 무선 링크 모니터링 및 타이밍 등과 같은 무선 자원 관리와 RF 성능 요구사항, NTN 주파수 대역, TN과 NTN의 다중연결, NTN의 NB-IoT와 LTE-MTC의 지원 등이 고려되고 있다[22,23].
Ⅴ. 결론
본 고에서는 3GPP에서 논의 중인 NTN의 시나리오, 요구사항 및 기술적 이슈에 대해 살펴보았다. 3GPP에서는 5G TN이 지원할 수 없는 영역으로의 확장을 통해 단말에 유비쿼터스 5G 서비스를 제공하는 목적으로 5G NR을 기반으로 하는 NTN 개발을 연구하고 있다. NTN은 GEO, LEO 위성과 같은 우주탑재 플랫폼 및 HAPs와 같은 UAS의 공중 플랫폼을 이용하여 5G 서비스를 제공하기 위해 해당 시나리오 및 긴 전파 지연, 큰 도플러 효과, 이동 셀 등의 요구사항을 도출하였다. 이러한 요구사항은 5G NR 설계에 적용된 가정과 모델 등에 대해 영향을 미치게 되며, 동기, 재전송 방식, 제어 절차, 모빌리티 증진, 서비스 연속성 등의 기술적 이슈들에 대한 솔루션을 요구하고 있다. 현재 3GPP 표준회의에서는 SI 단계로서 이동통신 업체들과 위성통신 업체들의 적극적 참여하에 NTN 채널 모델을 기반으로 다양한 기술적 이슈들에 대해 성능 분석 및 솔루션을 연구하고 있으며, 향후 기술 규격화 작업과 함께 보다 다양한 서비스 시나리오를 개발할 것으로 예상된다.
많은 기술적 이슈들에 대해 연구가 필요함에도 불구하고 NTN의 개발은 향후 어디서나 이용할 수 있는 5G 서비스의 신뢰도를 강화시킬 뿐만 아니라 자체 운영되는 NTN 또는 TN과의 통합 네트워크를 통해 기차, 선박, 비행기 등의 이동 플랫폼에 대한 5G 서비스의 확장, 그리고 TN에 영향을 주는 자연 또는 인공 재해에 대한 서비스 복원성 제공에 기여할 것으로 기대하고 있다.
약어 정리
3GPP
3rd Generation Partnership Project
5G
Fifth generation
AMC
Adaptive Modulation and Coding
CSI
Channel State Information
CU
Centralized Unit
CQI
Channel Quality Indicator
DCI
Downlink Control Information
DU
Distributed Unit
GEO
Geostationary Earth Orbit
HAPs
High Altitude Platforms
IAB
Integrated Access and Backhaul
IoT
Internet of Things
ISL
Inter-Satellite Links
KPI
Key Performance Indicator
LEO
Low Earth Orbit
LLS
Link Level Simulation
M2M
Machine to Machine
MCS
Modulation and Coding Scheme
MTC
Machine Type Communication
NB
NarrowBand
NR
New Radio
NTN
Non-Terrestrial Network
PUCCH
Physical Uplink Control CHannel
PUSCH
Physical Uplink Shared CHannel
RAN
Radio Access Network
RAR
Random Access Response
RLC
Radio Link Control
RS
Reference Signal
RSRP
Reference Signal Received Power
RSRQ
Reference Signal Received Quality
RTT
Round Trip Time
SA
Services & Systems Aspects
SI
Study Item
SLS
System Level Simulation
SSB
Synchronization Signal Block
TA
Timing Advance
TAC
Tracking Area Code
TAU
Tracking Area Update
TN
Terrestrial Network
TR
Technical Report
TS
Technical Specification
UAS
Unmanned Areal System
WI
Work Item
WG
Working Group
3GPP TR 38.811 v15.1.0, "Study on New Radio (NR) to support non-terrestrial networks (Release 15)," June 2019.
RP-181370, "Study on solutions evaluation for NR to support Non Terrestrial Network," 3GPP RAN#80, June 2018.
3GPP TR 38.821 v0.7.0, "Solutions for NR to support non-terrestrial networks (NTN) (Release 16)," May 2019.
3GPP TR 22.822 v16.0.0, "Study on using Satellite Access in 5G; Stage 1 (Release 16)," June 2018.
3GPP TS 22.261 v16.8.0, "Service requirements for the 5G system; Stage 1 (Release 16)," June 2019.
3GPP TR 23.737 v1.0.0, "Study on architecture aspects for using satellite access in 5G (Release 16)," Aug. 2019.
3GPP TR 28.808 v0.2.0, "Study on management and orchestration aspects with integrated satellite components in a 5G network (Release 16)," Aug. 2019.
R2-1911748, "Revision to Non-Terrestrial Networks reference scenarios parameters," 3GPP RAN2#107, Aug 2019.
R2-1909256, "Report of Email Discussion [106#70] [NR/NTN] RACH capacity/procedures," 3GPP RAN2#107, Aug 2019.
3GPP TS 38.322 v15.5.0, "NR; Radio Link Control (RLC) protocol specification (Release 15)," Mar 2019.
3GPP TS 38.300 v15.7.0, "NR; NR and NG-RAN Overall Description; Stage 2 (Release 15)," Sept. 2019.
3GPP TS 23.122 v16.3.0, "Non-Access-Stratum (NAS) functions related to Mobile Station (MS) in idle mode (Release 16)," Sept. 2019.
RP-190964, "Solutions for NR to support non- terrestrial networks (NTN)," 3GPP RAN#84, June 2019.
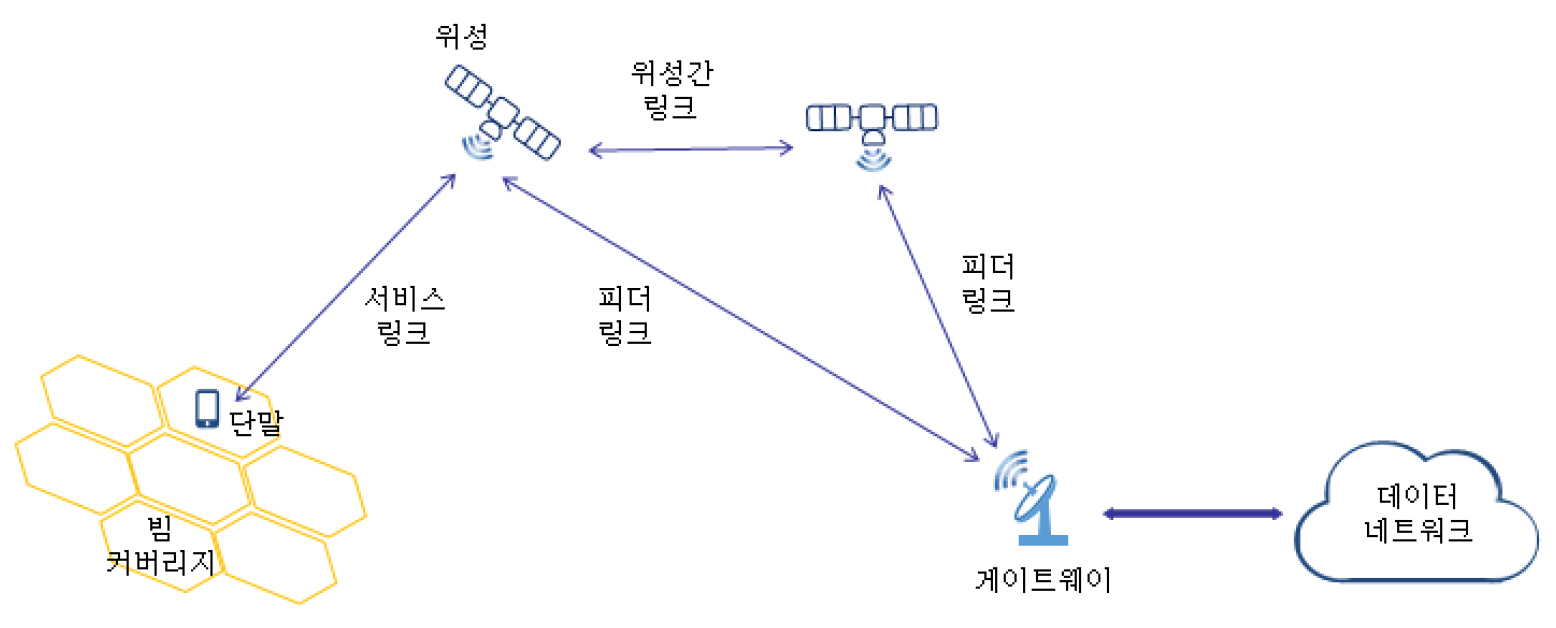
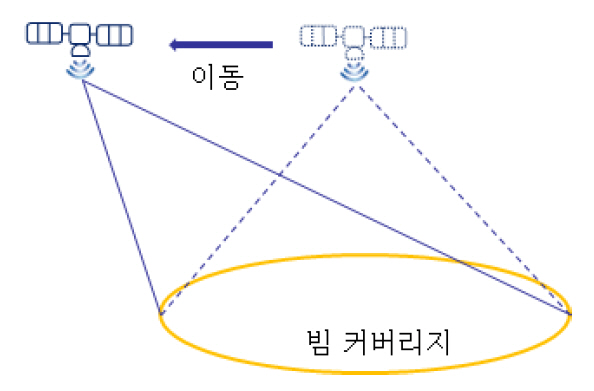
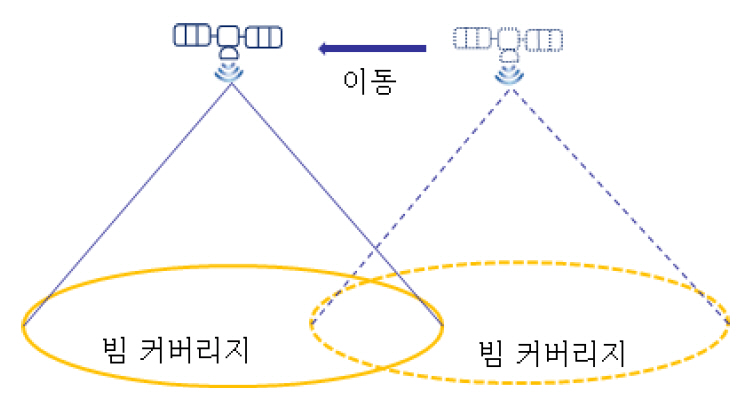
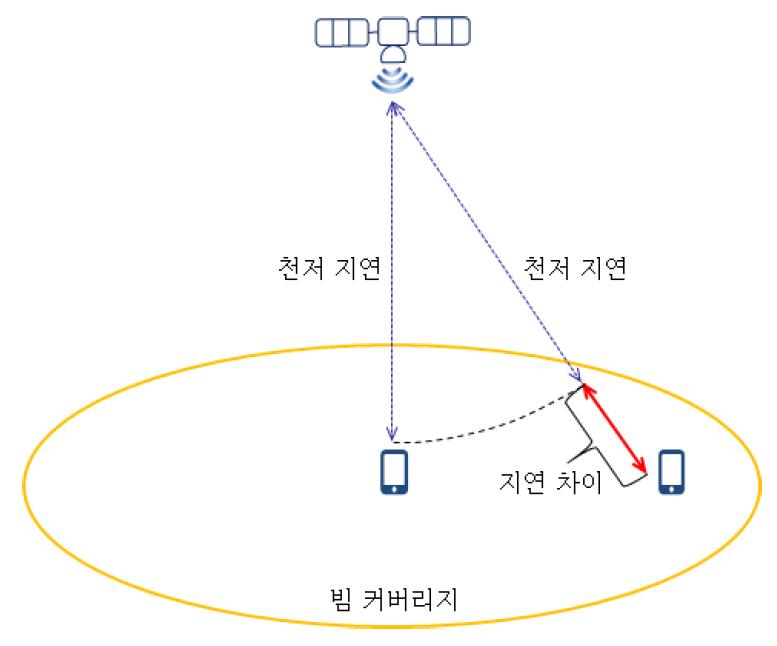
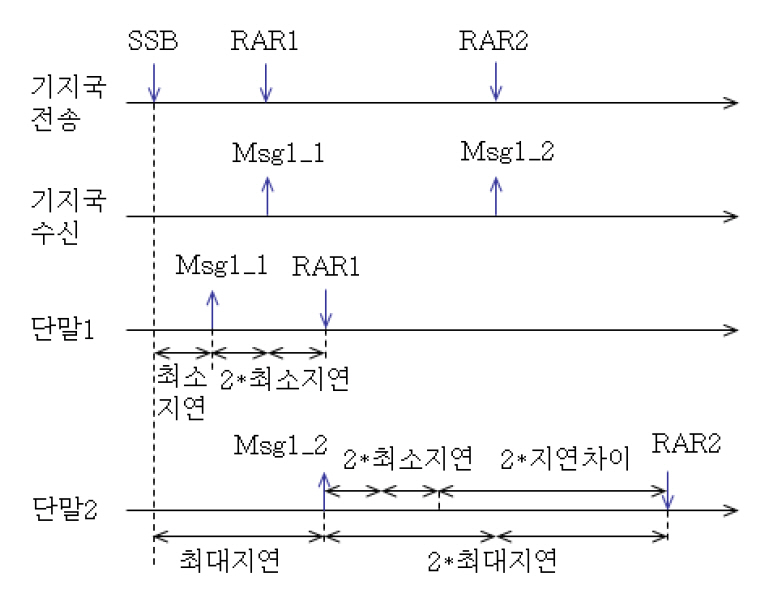
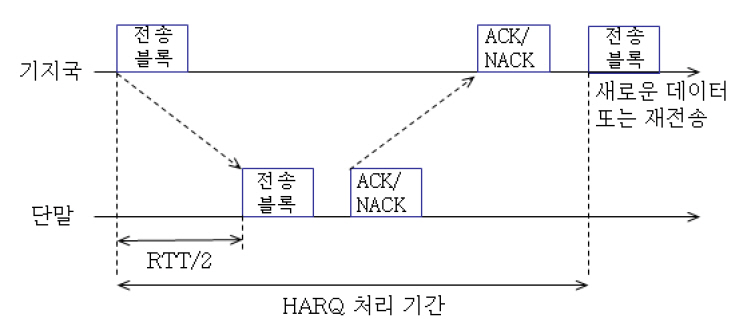
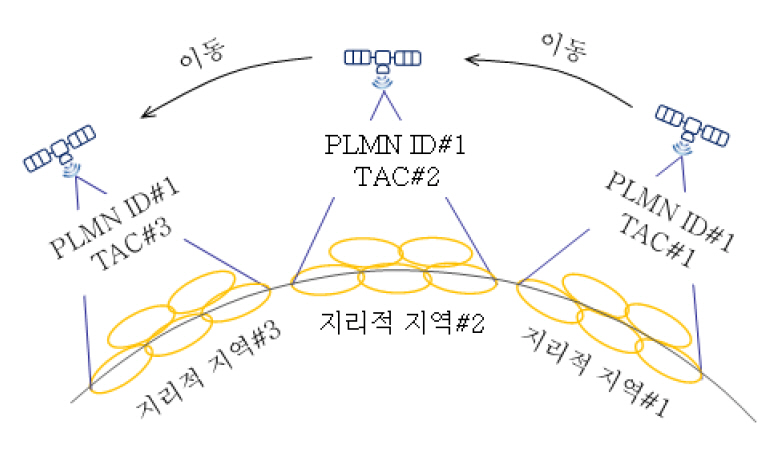
표 1 NTN 시나리오
| Transparent 위성 | Regenerative 위성 | |
|---|---|---|
| GEO 기반 | 시나리오 A | 시나리오 B |
| LEO 기반: 고정 빔 | 시나리오 C1 | 시나리오 D1 |
| LEO 기반: 이동 빔 | 시나리오 C2 | 시나리오 D2 |
표 2 NTN의 GEO와 LEO 파라미터
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.