
배희철 (Bae H.C.)
김현종 (Kim H.J.)
한효녕 (Han H.N.)
이용귀 (Lee Y.K.)
손지연 (Son J.Y.)
Ⅰ. 서론
인공지능 기술은 최근 30년간 발생한 기술 중 가장 혁신적이라는 평가[1]와 함께 산업 전반의 광범위한 변화를 초래할 것으로 전망되고 있다.
제조 산업에서의 인공지능 기술은 아마존, 구글에서 사용하는 통상의 인공지능 기술과는 달리 고신뢰, 고정밀, 실시간성을 요구하는 제조 현장에 적용 가능한 기술이어야 하며, 축적된 데이터 분석/예측을 통해 제조 공정의 최적 운영방안을 제시하여 생산성을 향상시키는 것뿐만 아니라 제품기획, 설계/엔지니어링, 생산, 조달, 사후 관리 등 제조 전 영역의 다양한 분야에서 활용되고 있다.
제조 산업은 소비자의 요구사항이 다양해지고 빠르게 변화함에 따라 향후 공급자가 주도하던 생산방식으로부터 소비자가 주도하는 생산방식으로 힘과 균형이 이동하고 있다[2]. 이에 따라 그림 1과 같이 대량생산에서 맞춤생산 시대를 넘어 개인이 원하는 제품을 쉽게 만들 수 있는 개인화 생산 시대로 진화될 것으로 예상되며[3], 이는 다품종 소량생산이 가능한 유연생산 체제뿐만 아니라 제조 전 주기에 걸친 지능화와 고도화를 요구하게 된다.

본 고에서는 미래 스마트 제조를 위해 주목할 만한 대표적인 인공지능 융합 기술 분야를 표 1과 같이 제품 디자인 및 설계, 작업환경, 품질관리, 설비운용 단계로 나누어 적용 사례 및 최근 기술 동향에 대해 소개하고자 한다.
표 1 제조 영역 별 인공지능 기술
Ⅱ. 제너레이티브 디자인 기술
1. 개요
인간의 창의적인 활동 영역인 제품 디자인 및 설계 분야에서도 AI 기법 중 딥러닝 기술이 접목되면서, 데이터 자체의 학습을 이용한 다양한 설계 지능화가 시도되고 있다.
특히 제조 전 주기 중 가장 많은 피드백과 시행착오를 필요로 하는 초기 설계 및 설계 최적화 과정은 확률 및 최적화 이론을 바탕으로 하는 딥러닝 분야와 접근 방향이 유사하므로 쉽게 딥러닝과 접목되어 응용될 수 있다. 딥러닝을 활용한 최적설계에 관한 연구는 제너레이티브 디자인(Generative design), 위상 최적화(Topology optimization), CAE 시뮬레이션, 형상 설계(Shape parameterization), 재료 설계(Materials design), 강화학습 기반의 설계 최적화, 대리모델(Surrogate modeling) 등 다양한 세부영역을 중심으로 활발하게 진행되고 있다.
인공지능 기반의 여러 설계 지능화 기술 중에서도 제너레이티브 디자인은 궁극적으로 인공지능이 스스로 새로운 설계 대안들을 생성하고, 사람은 도출된 대안에서 선택 정도의 의사결정만 하면 되는 미래 스마트 공장과 관련된 인공지능 기술이다.
2. 기술동향
제너레이티브 디자인은 기존의 설계 탐색(Design exploration) 방법론과 유사하게, 설계 목적과 파라미터를 정해 주면, 주어진 탐색 공간 내에서 생성가능한 다양한 위상 최적화 설계안들을 자동으로 도출하는 기술이다.
제너레이티브 디자인은 위상 최적화 및 파라메트릭 디자인과 밀접한 관계가 있어 표 2와 같이 서로 간의 차이점을 정확하게 이해하는 것이 중요하다[4]. 위상 최적화는 정의된 문제에 대해 하나의 최적 설계안을 도출하게 되는데, 제너레이티브 디자인은 다양한 문제 정의에 대해 각각의 위상최적화 설계안을 생성하여, 다량의 구조 설계안들을 동시에 도출할 수 있기 때문에 기존 원하는 사양을 충족하는 디자인을 찾을 때까지 계속 설계를 수정해야 하는 수많은 피드백 사이클을 벗어날 수 있다.
표 2 제너레이티브 디자인과 타 방법론과의 차이
제너레이티브 디자인 기술에서는 위상 최적화를 위한 문제 정의를 어떻게 다양화하고, 효율화할 것인가가 문제의 핵심이 된다. 이러한 관점에서 최근에는 제너레이티브 디자인 기술이 딥러닝 기술 중 하나인 VAE, GAN 기술 등과의 결합을 통해 인공지능 기반의 설계 지능화 기술로 발전하고 있다.
GAN을 이용한 최근의 연구로는 BEGAN을 이용한 자동차 휠 설계안의 생성 모델[5] 연구, GAN과 Gausian process 및 Bayesian optimization을 접목한 설계안 최적화 연구[6], Shape Parameterization by VAE[7], Layout Design by VAE[8], Topology Optimization by GAN[9] 등이 있다.
Ⅲ. 인간-로봇 협업 스마트 작업대 기술
1. 개요
로봇 기술은 AI, IoT(Internet of Things) 기술과 함께 4차 산업혁명의 핵심 기술 중 하나이며, 인간과 함께 협업할 수 있는 로봇이 산업현장에서 주목받고 있다. 그림 2와 같이 제조 현장에 로봇의 도움없이 인간만이 작업을 하게 될 경우 다양한 변수에 대응할 수 있는 유연성은 높아지지만 생산성이 떨어진다. 인간이 개입되지 않는 완전 자동화라인의 경우, 생산성은 높아지지만 유연성이 떨어질 수 있고, 특히 조립기 같은 경우 생산 제품이 자주 변경될 경우 설비 티칭 및 셋업에 소모되는 시간이 많아져 생산효율을 떨어뜨릴 수 있기 때문에 인간과 로봇의 적절한 협업은 생산성과 유연성을 확보하는 데 매우 중요한 요소이다[10].

특히, 미래에는 제품에 대한 고객의 요구사항이 다양해지고 빠르게 변화할 것으로 예측된다. 이로 인해 공장에서는 다양한 제품을 빠른 시간 안에 생산할 수 있는 유연 생산 환경, 즉 수시로 바뀌는 생산 제품의 사양 확인, 정확한 부품 선택, 높은 작업 숙련도가 필요한 고도의 혼류 생산 환경을 작업자들에게 요구하고 있다. 또한 전 세계적으로 노동 인구가 고령화되고 있는 현 상황에 복잡한 작업을 도와줄 수 있는 새로운 작업 환경의 도입은 필수적이라 할 수 있다.
2. 기술동향
독일의 스마트 팩토리 솔루션 선도 기업 중 하나인 Festo는 사람의 움직임 패턴을 가진 로봇 팔과 다양한 지원 시스템 및 주변 장치가 서로 연결되어 작업자를 지원하는 바이오닉 워크플레이스(Bionic Workplace)를 선보였다.
바이오닉 워크플레이스는 해부학적 구조 측면에서 인간의 팔을 기반으로 한 로봇(Robot Arm)을 탑재하여, 유연하고 민감한 움직임을 제공함으로써 부품 이송에서부터 조립까지 다양한 작업을 지원할 수 있다. 또한 이 작업대는 작업자를 중심으로 네트워크로 연결되어 통신이 가능한 수많은 보조시스템 및 주변 장치와 상호 교환되는 정보들에 머신러닝 기법을 적용하여 끊임없이 작업대를 최적화하는 학습 및 예측 시스템을 탑재하고 있다.
바이오닉 워크플레이스는 작업자에 맞춰 최적화될 수 있으며, 작업자의 시야 중심에는 대형 스크린이 존재하여 작업자의 업무와 관련된 모든 정보를 제공하고, 관련 요구사항에 따라 동적으로 대응할 수 있다. 또한 스크린 주위에는 다양한 센서와 카메라 시스템이 장착되어 있어 작업자, 작업 내용 및 작업 부품의 위치를 지속적으로 기록하고, 작업자는 움직임, 터치 또는 음성을 이용하여 로봇을 비롯한 작업대 구성요소들과 직접 상호작용하며 이를 제어할 수 있다.
이 스마트 작업대는 관성 센서가 부착된 긴팔 상의와 적외선 마커가 부착된 작업용 장갑으로 구성된 특수한 형태의 웨어러블 수트(Wearable Suit)를 제공하며, 이를 통해 작업자의 움직임을 인식할 수 있다.
바이오닉 워크플레이스가 탑재한 경량 로봇은 웨어러블 수트를 통해 기록된 센서 데이터의 도움으로 정확하게 인간에게 물체를 넘겨주고 필요한 경우 다른 곳으로 이동시킬 수 있게 된다.
미래 제조 현장에서는 바이오닉 워크플레이스와 같이 학습이 가능한 지능적인 작업대와 다기능적인 도구를 사용함으로써 인간과 로봇의 협업은 앞으로 훨씬 더 직관적이고 단순하며 효율적이 될 것으로 기대된다. 특히 스마트 작업대를 통해 축적되는 작업 노하우 및 지식들은 같은 작업대를 사용하는 비숙련 작업자에게도 공유될 수 있어 제조 기업은 비숙련 작업자의 효율적이고 안전한 작업을 기대할 수 있게 될 것이다.
Ⅳ. 지능형 실감 인터랙션 가이드 기술
1. 개요
지능형 실감 인터랙션 가이드 기술은 사용자의 어떠한 행동에 실시간으로 반응하여 구동되는 하드웨어와 소프트웨어 기술을 뜻한다. 사용자의 몰입감과 현장감을 극대화하는 실감콘텐츠 및 미디어 제작, 전송, 처리기술 등의 분야를 총칭하는 산업 분야로 미래형 공장에서 각광받는 기술 중 하나이다. 기술의 범위는 시각, 청각, 촉각 등 오감을 받는 디스플레이 등 하드웨어, 이를 구동하는 소프트웨어, 햅틱, 증강현실(AR) 기술 등이 이에 해당한다[11].
웨어러블 디바이스를 활용하면, 가상현실(VR)과 증강현실(AR) 기술을 제조환경에 적용하여 공정순서, 조립 과정 등을 계획하고 시험해 볼 수 있어 효율적인 공정 설계가 가능할 뿐만 아니라 작업 과정에서의 추가 정보를 가상현실과 증강현실로 구현하여 물류관리, 장비점검 등의 추가적인 서비스 제공도 가능하다. 지능형 실감 인터랙션 가이드 기술은 복잡한 제조과정에서 증강현실 및 가상현실 기술을 활용하여 업무에 필요한 정보와 데이터를 즉각적으로 확인하여 공정 과정을 분석/파악하고 제조 공정을 제어할 수 있는 기술로, 효율적인 제조공정 설계를 가능케 하는 시뮬레이션 기술을 포함한다[12].
2. 기술동향
현실공간에서 가상의 컴퓨터가 생성한 물체를 인간이 다루는 증강현실 기술과 컴퓨터가 생성한 가상의 공간에서 생성된 오감을 인간이 체험하는 가상현실 기술은 사용자와 접점에 있는 기술로써, 시·공간, 신체적/상황적 제약을 극복하여 언제 어디서나 현실적 경험 제공이 가능하고, 그림 3과 같이 사용자에게 초 실감적 가치 제공이 가능하기 때문에 스마트 제조와 연계된 많은 연구개발이 진행되고 있다.

최근에는 다양한 센서 및 영상인식 기술을 활용하여 사용자의 의도를 파악하고 그에 맞는 대응을 해 주는 방향으로 지능형 실감 인터랙션 가이드 기술은 진화하고 있다. 활용되는 AI 기술로는 비전을 이용한 모션 트래킹 기술, 가속도, 자이로 센서를 이용한 움직임 예측 기술, 사용자 패턴인식을 위한 강화학습과 같은 딥러닝 기반의 기술들이 접목되고 있으며, 표 3과 같이 HMD(Head Mounted Display)와 스마트 글래스 장비들이 AI 기술을 통해 지능화되고 있다.
표 3 AR/VR 디스플레이 도구 분야의 세부 기술범위
가상현실 기술을 활용하면 실제 공장을 구축하고 고가의 테스트베드를 만들어보지 않아도 가상현실에서 공정, 조립 과정 등을 계획하고 시험해 봄으로써 효율적인 공정을 설계할 수 있다. 그리고 가상 공정 계획은 여러 관계자들에게 시각적으로 표현되어 미리 조립 과정을 살펴보면서 생산성, 스케줄링 등의 요소들을 분석하고 부적절한 부분을 수정할 수 있어 시간과 비용을 절약할 수 있다.
웨어러블 디바이스를 활용한 작업 현황 분석 및 예측 장치 기술 분야의 주요 기술은 제조 현장의 환경 특성을 반영한 데이터 수집 및 처리 기술, 시뮬레이션 단위 객체 저장소(Repository) 체계 구축 기술, CPS(Cyber Physical System) 작업자 연동 지원 기술, 모델링 대상 요소별 디지털-물리적 제어 연동 수준 분석 기술, 도메인별(업종별, 공정별) 모델링 기술로 나타난다[13].
지능형 실감 인터랙션 가이드 기술은 도입기를 지나 도약기로 접어들고 있다. 스마트팩토리 확산과 함께 많은 수요와 공급이 이루어질 것으로 전망되고 있으며, 특히 직관적인 커미셔닝을 위한 선택이 아닌 필수 기술로 발전하고 있다.
Ⅴ. 자율 제조를 위한 지능형 설비기술
1. 개요
현재까지의 제조 산업은 생산 효율에 맞춰 관련 기술들이 발전되어 왔다. 사람 대신 높은 동력에 지치지 않는 기계가 적용되었고, 현재 대량생산의 상징인 컨베이어 벨트를 따라 순차적으로 세분화된 작업이 효율적이고 빠르게 많은 제품을 생산할 수 있게 되었다. 하지만 이렇게 대량생산에 맞춰진 공장 라인은 수개월에서 수년간 유사한 제품만 제조 가능하였다. 중앙 집중 방식으로 관리되었기에 설비 기능 하나를 바꾸면 전체 시스템에 영향을 주었고, 설비 하나에서 이상이 발생하면 작업자와 같이 해결방안을 찾아야 했다.
삶의 질이 높아지고 각자의 개성이 강해지면서, 공장에서 생산하는 동일한 제품이 아닌 개인화/맞춤형 제품에 대한 요구가 높아지고 있다. 이러한 맞춤형 개인화 제품에 대한 생산은 기존의 대량생산의 방식으로는 생산이 어렵다. 다품종 소량생산을 위해서는 다양한 제품과 다양한 수량의 제품을 동시에 생산할 수 있는 유연한 지능 시스템이 필요하다. 그리고 실시간으로 변경되는 신규 및 기존 주문에 즉각 적용이 가능한 동적 작업 계획, 라인 구성, 설비 교체 등을 실시간으로 지원할 수 있는 지능형 설비 기반의 자율 분산 시스템 기술이 필요하다[14,15].
2. 기술동향
가. 지능형 설비
분산 자율 제조의 핵심 기술 중 하나는 지능형 설비로, 제조 지능을 통해 작업자의 설비 셋업 시간을 획기적으로 감소시킬 수 있다. 또한 설비 기술자가 설비에게 전달하는 제어 명령의 단계를 높여 최소한의 제어 정보를 활용하여 기존에 학습한 지식 바탕으로 자율적인 업무를 수행할 수 있다.
지능형 설비 중 산업 현장에 가장 빠르게 적용되고 있는 설비는 경량화 협동 로봇으로 기존 산업용 로봇에 비하여 작은 사람 팔 크기를 가지고 있으며, 작업자의 안전을 고려한 safety 관련 기술이 포함되어 있다. 그림 4에 나타낸 경량화 협동 로봇은 lead-through programming 기술과 force control 기술로 작업자의 움직임을 통해 궤적을 생성하는 방식을 적용하여 기존 프로그래밍 방식인 궤적 생성 방식에 비해 획기적으로 셋업 시간을 감소시킬 수 있다[16].

설비 셋업 시간과 관련하여, 기존 작업 방식에서는 셋업 시간 중 장애물 회피 및 좁은 공간을 통과하는 등의 궤적을 생성하는 작업에 많은 시간이 소비되었다. 일본 로봇 기업인 Mujin에서는 기계학습 및 인공지능을 기반으로 장애물 회피 등을 고려하여 설비의 궤적을 자동으로 생성해 주는 기술을 연구 적용 중이다[17].
물류 및 공장 내 이송에 사용되는 무인 운반차(AGV: Automated Guided Vehicle)는 주로 기 설치된 공장 내 마그네틱 라인을 따라 움직이게 된다. 따라서 새로운 공정 라인 설치라던가 경로 변경 발생 시 작업장 바닥 라인 공사 및 경로 수정이 필요할 수밖에 없었다. 이러한 한계를 극복하기 위해서 자율주행차 등에 주로 사용되는 동시적 위치 추정 및 지도 작성(SLAM: Simultaneous Localization and Mapping) 기술이 공장 물류를 담당하는 무인 운반차에 적용되고 있으며, 무인 운반체에 로봇이 탑재된 자율이송 로봇(AMR: Autonomous Mobile Robot) 개발도 활발히 이루어지고 있다. AMR은 Lidar 센서 등을 활용하여 주변의 지형지물을 인식하고 목표점으로 이동하여 공정 라인 변경이나 설비 위치 변경에도 유연하게 대처할 수 있다[18].
나. 자율 협업 설비
지능형 설비 연구 분야에서는 개별 설비가 지닌 단독 지능을 넘어 설비 간 협업을 위한 협업 지능의 필요성도 요구되고 있다. 싱가포르 난양공과대학에서는 두 대의 로봇 팔을 이용하여 Ikea의 Stefan 의자를 조립할 수 있는 연구 개발을 수행하였다. 설명서 분석, 부품 물체 인식, 장애물 회피 및 힘 제어 기술을 기반으로 상대 로봇 움직임을 분석, 예측함으로써 두 지능 로봇 간의 협업을 통한 제품 조립 기술을 선보였다[19].
선도적인 독일 스마트 공장 솔루션 기업 중 하나인 지멘스에서도, 지능을 가진 두 로봇이 협업하는 생각하는 공장 기술을 개발하였다. 이 기술은 설계도면을 Semantic Lifting 기법을 통해 설비 제조에 필요한 행동 요소들을 단위 동작으로 나누고, 지식 맵 방식을 통하여 동작 간의 연관 관계 및 작업 연계 등을 추출하여 설비 간 자율 협업이 지원된다[20].
Ⅵ. 공장이상 탐지 기술
1. 개요
IoT가 적용된 제조 현장에서는 생산 과정에 시계열 센서 데이터 및 이벤트가 발생하고, 각종 제어 파라미터 및 작업의 결과가 기록된 로그 데이터가 엄청난 양으로 만들어지고 있다. 이러한 데이터를 활용하여 불량품 감지 및 예방정비 또는 재료의 특성 예측에 기계학습을 이용한 이상 감지 기술을 적용할 수 있다. 특히 설비 및 센서로부터 수집된 데이터셋(Dataset)으로부터 비정상적인 데이터를 검출할 수 있다면 생산라인에서는 일정 수준 이상의 품질과 성능을 달성함으로써 비용 및 시간을 절감할 수 있다[21].
생산 라인의 예방 정비 차원에서 기계학습(AI)은 생산 설비에서 나오는 전류, 진동, 소리 등 다양한 데이터를 학습하여 그 설비 자체의 고장 및 잔존수명을 예측할 수 있고, 기계학습 모델을 통해 설비이상 조짐을 파악할 수 있다.
이상 감지(Anomaly detection)는 기계학습과 데이터마이닝의 중요한 이슈로서 여러 응용 분야에서 다양한 형태로 연구되고 있다. 하지만 이상 데이터의 수가 정상 데이터에 비해 매우 적은 경우가 많고, 정상 패턴과 매우 유사하거나 알려진 이상 패턴과 다른 새로운 패턴이 발생하기도 한다. 이런 문제를 해결하기 위해 정상 데이터를 잘 학습하고, 학습된 정상 데이터의 특징과 구분되는 이상 데이터의 특징을 추출할 수 있는 모델과 학습 알고리즘이 필요하다.
2. 기술동향
가. 딥러닝 기반 이상 감지 기술
딥러닝은 그림 5와 같이 학습할 수 있는 데이터의 크기가 증가함에 따라 기존의 기계학습보다 점점 더 성능이 우수해지고 있다. 최근 몇 년 동안 딥러닝 기반 이상 감지 알고리즘이 점점 인기를 끌고 있으며, 다양한 분야에 적용되고 연구되면서 딥러닝의 우수성이 증명되고 있다.

많은 기계학습 문제에서 딥러닝 알고리즘이 상당 부분 발전했음에도 불구하고 딥러닝 기반의 이상 감지 기술 분야는 상대적으로 발전이 더딘 상황이다.
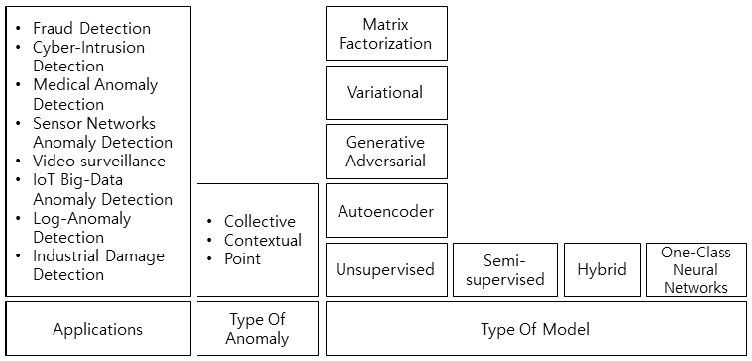
딥러닝 기반 이상 감지(DAD: Deep Anomaly Detection) 기술은 그림 6에 나타낸 바와 같이 사물인터넷(IoT)과 빅데이터 이상 검출, 센서 네트워크 이상 징후 검출 등 다양한 카테고리와 함께 비디오 이상 감지를 위한 심층 학습 방법 등에 관한 연구가 진행되고 있다[22].

최근 보다 감소된 컴퓨팅 연산 요구량만을 갖는 새로운 심층 학습 기반의 이상 감지 기술들이 개발되고 있으며, 이들 기술을 체계화된 스키마로 분류하여 관련 기술의 이해를 높일 수 있다.
나. DAD 기술 동향
DAD 기술은 이상 징후 여부를 표시하는 라벨의 사용 가능 정도에 따라 지도학습(Supervised), 반지도학습(Semi-supervised), 비지도학습(Unsupervised) 이상 감지 기술로 구분할 수 있으며[23], 트레이닝 목적에 따라 DHM(Deep Hybrid Models), OC-NN(One Class Neural Networks)로 구분된다.
1) Supervised deep anomaly detection
지도학습 DAD 기술은 정상 데이터 및 비정상 데이터 인스턴스의 라벨을 사용하여 심층 지도학습된 이진수 또는 다중 등급 분류자를 훈련시키는 것을 포함한다. 하지만 지도학습 DAD 기술의 성능이 개선되었음에도 불구하고 등급 라벨링된 트레이닝 샘플의 가용성 부족으로 인해 반지도학습이나 비지도학습에 비해 많이 활용되지 못한다.
2) Semi-supervised deep anomaly detection
정상적인 인스턴스의 라벨은 이상 징후보다 쉽게 구할 수 있으며, 그 결과 반지도학습 DAD 기술이 더 많이 활용됨에 따라 아웃라이어를 분리하기 위해 기존 라벨을 활용할 수 있다. 이상 징후를 감시함에 있어 심층 오토엔코더(Autoencoder)를 사용하는 일반적인 방법 중 하나는 이상 징후가 없는 데이터 샘플에 대해 반지도학습 방식으로 훈련시키는 것이다. 이때 충분한 트레이닝 샘플을 이용할 경우 오토엔코더는 비정상적인 사건에 대해 보다 낮은 확률로 재구성 오류를 발생시킬 수 있다.
3) Unsupervised deep anomaly detection
비지도학습 DAD 기술은 데이터 인스턴스의 내적 특성에만 기초하여 아웃라이어를 탐지하며 라벨링 데이터를 얻기 매우 어렵기 때문에 라벨링되지 않은 데이터 샘플의 자동 라벨링에 사용된다.
4) Deep hybrid models(DHM)
이상 감지를 위한 심층 하이브리드 모델(DHM)은 주로 특징 추출기로서 오토엔코더를 사용하며, 오토엔코더의 은닉표현 내에서 학습된 특성은 아웃라이어를 검출하기 위해 전통적인 이상 감지 알고리즘의 입력으로 사용된다.
하이브리드 접근법의 단점은 이상 감지를 위해 맞춤화된 훈련 가능한 목표가 없기 때문에 이 모델은 아웃라이어를 탐지하기 위해 필요한 특징들을 데이터셋으로부터 추출하지 못한다. 이런 한계를 극복하기 위해 심층 원클래스(one-class) 분류와 같은 이상 검출을 위한 맞춤형 목표 및 단일 클래스의 신경망을 적용한다.
5) One-class neural networks(OC-NN)
OC-NN 기술은 커널 기반의 단일 분류에 의해 영감을 받은 것으로, 이 분류는 데이터를 점진적으로 표현할 수 있는 심층 네트워크의 능력과 정상 데이터의 주변을 타이트하게 구분할 수 있는 원클래스 목표를 결합한 것이다. OC-NN 접근방식에서 숨겨진 계층의 데이터 표현은 OC-NN 목적에 의해 이루어지기 때문에 이상 감지를 위해 쉽게 변형 가능하다.
다. 제조업에서의 이상 감지 기술
제조에서 이상 감지 기술은 다양한 제조 환경에서 비정상 데이터 확보가 어렵고, 고장 물리 모델에 대한 데이터가 적기 때문에 기존 전통적인 Anomaly Detection 알고리즘은 계산복잡도가 높으며 오프라인 태스크 위주로 연구되고 있다.
사람이 공장 환경 내에서 수집된 데이터를 기반으로 설비의 기능 이상유무 클래스를(정상/비정상 등) 라벨링할 경우 많은 시간과 노력이 필요해진다. 노동집약적인 사람의 노력과 시간을 감소시키기 위해서는 설비가 보유한 고유한 기능을 수행할 때 정상 상태의 데이터를 기반으로 수행할 수 있는 실시간 Anomaly Detection 기법이 필요하다. 따라서 비정상 데이터 확보가 어렵고, 고장 물리 모델에 대한 데이터가 적은 다양한 제조 환경에서 제조설비의 고유 기능 수행 중 정상 상태의 데이터 수집 및 분석을 통한 AI 기반 Anomaly Detection 연구가 다양한 형태로 진행되고 있다. 향후 제조 설비의 이상 감지에 대하여 제조 환경에서의 다차원적인 데이터 관계 및 분석 등이 필요하며, 특히 다양한 제조 설비에 적용할 수 있는 일반화된 Anomaly Detection 기술에 대한 연구가 요구된다.
Ⅶ. 결론
4차 산업혁명 시대를 맞아 스마트제조 기술과 인공지능 기술의 융합은 제조업 혁신을 통한 글로벌 경쟁력 확보 차원에서 더욱더 중요해졌다. 특히 IoT 기술의 발전으로 다양한 생산 설비 및 현장, 생산 과정, 제품, 사용자들이 인터넷에 연결되고 있다. 이로부터 확보될 수 있는 데이터를 학습함으로써 제품의 설계에서부터 생산, 사후관리까지 다양한 분야에 인공지능 기술이 적용될 것으로 예측된다.
이로 인해, 제조설비 이상 감지, 불량제품 자동검사, 안전관리, 시장 수요예측 등의 생산 최적화가 가능하고, 기계학습 알고리즘을 통해 다양한 불량 사례를 학습할 수 있게 됨에 따라 공정 불량이 급감하고, 더 정확한 분석과 시장 예측이 가능해질 수 있다.
뿐만 아니라, 제조 전 영역에 걸친 인공지능 기술 접목은 미래 유연 생산체제 환경에 대한 요구사항들을 만족시킴으로써 개인이 원하는 제품을 언제든지 주문하고 생산, 판매까지 할 수 있는 수요자 중심의 새로운 제조 시대를 앞당길 수 있을 것으로 기대한다.
용어해설
Generative Design 디자인을 통해 달성하고자 하는 목표와 발생하는 여러 제한요소를 입력하면, 알고리즘을 통해 다양한 형태를 창조하고 하나의 디자인을 위한 수백만 가지 옵션을 생성
Smart Workbench AI 기반 인간, 로봇 최적 Task 할당 및 Planning/Scheduling 기술을 통해 작업자에게 최적 작업 환경 제공
Anomaly Detection 주어진 데이터를 주어진 시간 내에 가능한 한 빨리 수집하여 비정상 상황을 감지하고 예측
약어 정리
AGV
Automated Guided Vehicle
AMR
Autonomous Mobile Robot
AR
Augmented Reality
CPS
Cyber Physical System
DAD
Deep Anomaly Detection
GAN
Generative Adversarial Network
HMD
Head Mounted Display
IoT
Internet of Things
SLAM
Simultaneous Localization and Mapping
VAE
Variational Autoencoder
VR
Virtual Reality
XR
eXtended Reality
참고문헌
그림 1
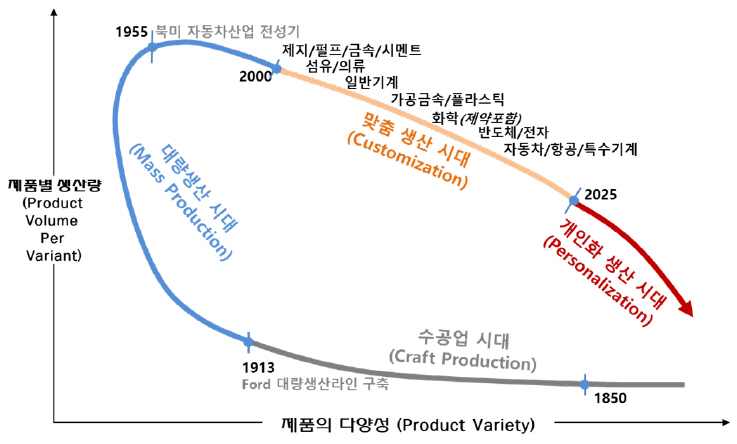
제조업 패러다임의 변화 및 산업별 현재 위치
그림 2
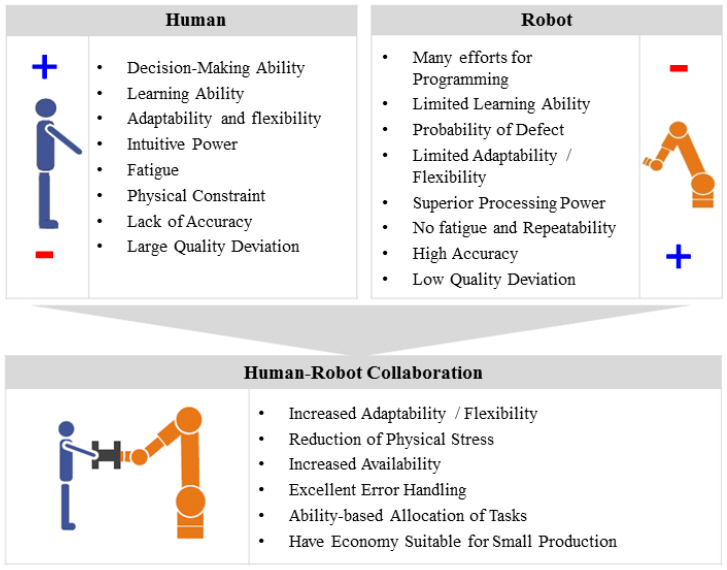
산업 현장에서의 인간과 로봇의 작업 특성
그림 3

AR활용 실감 인터랙션 예시
그림 4
Lead-through programming 탑재 로봇
그림 5
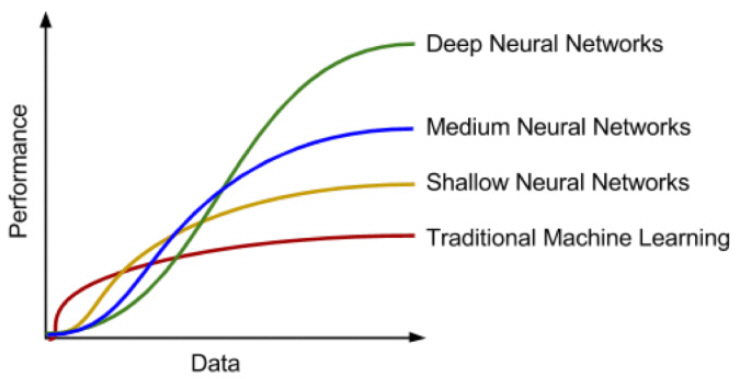
딥러닝과 기존 기계학습 알고리즘 간 성능 비교
그림 6
딥러닝 기반 이상 감지 기술과 관련된 주요 컴포넌트