조선해양산업과 정보통신기술 융합 동향에 따른 표준화 현황
Standardization Status in Maritime Industry Domain and ICT Convergence Trends
- 저자
-
김재명지능형위치항법연구실 jaemkim@etri.re.kr 임동선지능형위치항법연구실 dslim@etri.re.kr 김도현지능형위치항법연구실 dohyun@etri.re.kr
- 권호
- 35권 3호 (통권 183)
- 논문구분
- 일반논문
- 페이지
- 85-97
- 발행일자
- 2020.06.01
- DOI
- 10.22648/ETRI.2020.J.350309
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- In the maritime industry, the convergence of information and communication technology (ICT) occurs in two areas. The first one is the convergence of e-navigation technology to apply ICT to the maritime domain. This was led by EU’s initiative and is also being promoted in our country. The other one is the convergence of autonomous ship technology to apply various ICT technologies for commercial purposes. This initiative is being led by maritime industries. In this paper, we describe trends of e-navigation and maritime autonomous surface ship technology convergence. Subsequently, we explain the standardization status of performance and technical standard bodies, international standardization organizations, and related standard-developing organizations to provide the interoperability of these technologies. Finally, we examine ongoing projects in Korea and suggest future directions for their R&D and standardization.
Share
Ⅰ. 서론
조선해양산업 분야에서 정보통신기술(ICT)의 융합은 크게 두 가지 흐름을 가지고 있다. 하나는 정부가 주도하여 공공의 목적으로 조기에 조선해양산업 분야에 ICT를 적용하기 위한 e-Navigation 기술 융합과 다른 하나는 상업적 목적으로 민간이 주도하고 정부가 보조하여 다양한 ICT 기술을 활용하기 위한 자율운항선박 사업과의 융합이다.
본 고는 EU의 e-Maritime 정책에 따른 주도권 확보를 목적으로 추진한 e-Navigation 기술 개발 동향과 물류비용을 절감하기 위해 정부의 연구개발 지원을 받아 민간주도로 추진되고 있는 자율운항선박 기술 개발 동향을 살펴보고, e-Navigation 기술과 자율운항선박 기술의 ICT 기술 융합에 따른 성능 기준과 기술 기준을 제시하는 국제기구인 국제해사기구(IMO)와 전파부문을 담당하는 국제전기통신연합(ITU-R), 국제 기술 절차 표준과 시험 방법 표준을 제시하는 국제표준기관인 국제표준화기구(ISO)와 국제전기기술위원회(IEC) 및 국내외 단체표준을 제정하는 국제항로표지협회(IALA), 한국정보통신기술협회(TTA) 등에서 추진하고 있는 국제 표준화 현황과 국내 표준화 현황을 살펴본 후 산업지향적인 기술 개발 방향과 실익에 맞는 표준화 추진 방안을 제언하고자 한다.
Ⅱ. e-Navigation 기술 융합 동향
단순한 전자 항해장비의 이용 차원을 넘어 전자 항해장비 및 새로운 통신수단을 이용하여 수동으로 수행하던 작업들의 자동화로 항해안전뿐만 아니라 환경보호, 구난, 보안, 물류에 이르기까지 다양한 해양 분야의 업무 효율 및 신뢰성을 향상해야 한다는 e-Navigation 정책, 즉 조선해양 도메인에 ICT 기술을 도입하고자 하는 요구가 제기되었다[1].
2006년 MSC 제81차에서 e-Navigation 정책 이행을 위한 전략계획 및 비전 개발을 위한 “e-Navigation 전략 개발”이란 의제를 승인하였으며, 이는 EU에서의 운송과 물류의 효율향상이라는 목표를 가진 e-Maritime 전략과 일치하며, 해상 싱글윈도우(MSW) 구현을 통해 실현되고 있다[2].
2015년 6월부터 EU 역내 국가들은 해상 싱글윈도우를 적용하였으며, 최근에는 IMO의 국제해상 교통간소화협약(FAL 협약)에 따라 2019년 4월 8일부터 선박-항만 간 전자문서교환 의무화가 시행되었다[3].
IMO MSC 제94차 회의에서 e-Navigation 전략이행계획(SIP)이 승인되었으며, 다음의 5가지 우선순위에 따른 e-Navigation 솔루션을 실행하기 위해 앞으로 구현되거나 실행될 필요가 있는 프레임워크와 업무의 로드맵을 제공하고 있다[4].
• 향상되고 조화로운 사용자 친화적인 브릿지(bridge) 설계
• 표준화 및 자동화된 보고 수단
• 브릿지 장비 및 항해 정보에 대해 향상된 신뢰성, 적용 유연성(resilience), 통합성 제공
• 통신장비를 통해 수신된 이용 가능한 정보에 대해 그래픽 디스플레이로 통합 및 표출
• VTS 서비스 포트폴리오의 향상된 통신
해사 서비스(MS)는 표 1과 같이 지역상황에 따라 VTS 당국, 국가위임기관(NCA) 등 서비스 제공자와 도메인조정기관(DCB)을 식별하고 있으며, 다양한 통신환경 및 글로벌 환경에서 운용될 수 있도록 해사연결플랫폼(MCP)을 구축 중에 있다[5].
표 1 지역상황 적용 서비스 제공자[6]
우리나라에서도 e-Navigation 정책을 구현하기 위해 해양수산부의 한국형 e-Navigation 사업단 주관으로 SMART-Navigation 사업을 2016년 3월부터 2020년 12월까지 수행 중에 있으며, 표 2와 같은 핵심과제를 수행 중이다.
표 2 연구 과제[7]
EU의 경우 e-Maritime 구현 계획과 e-Navigation 구현 계획을 연계하여 효율적인 해상운송 정보 공유와 업무 효율 개선을 목표로 다년간 수행한 연구개발 프로젝트 결과를 기반으로 효율적인 해사 서비스 제공을 추진하고 있는 데 반해, 한국의 경우는 연구개발과 병행하여 해사 서비스 포트폴리오(MSP)를 구현하고 있다는 점에서 큰 차이가 있다.
특히 해사 서비스 제공의 기반이 되는 통신 인프라 구축은 EU에서는 해사 서비스의 원활한 지원을 위해 초단파 데이터 교환 시스템(VDES)의 표준화에 주력하고 있는 반면, 우리나라의 경우 해사 서비스 솔루션 제공 인프라와는 조금 다른 공공안전 주파수를 활용한 4G 통신 기반의 LTE 초고속해상 무선통신망 구축에 주력하고 있다.
Ⅲ. 자율운항선박 기술 융합 동향
제4차 산업혁명은 ICBM 기술, 즉 사물인터넷(IoT), 클라우드 컴퓨팅(Cloud computing), 빅데이터(Big data), 모바일(Mobile) 기술이 초연결성(Hyper-connected) 및 초지능화(Hyper-intelligent) 특성의 융합화 및 지능화를 통해서 기계와 소프트웨어를 자율적으로 제어할 수 있는 기술의 도래이다[8].
e-Navigation 개발이 해사 서비스 분야에 ICT 도입의 시발점이라면, 자율운항선박은 제4차 산업혁명의 변화의 물결에 대응하는 ICT 기술의 적용 단계라 볼 수 있다.
자율선박에서는 신속한 상황인식을 통해 중대한 의사결정을 내리기 위해 강건하고, 효과적인 정보 파이프라인이 필요하며, 이러한 파이프라인의 기초를 이루고 있는 다섯 가지 상호보완적 혁신 기술(Complementary disruptive technologies)이 존재하며 그림 1과 같이 구성된다.
그림 1
자율선박시스템 디지털 파이프라인[9]
출처 K. Heffner and Ø.J. Rødseth, “Enabling Technologies for Maritime Autonomous Surface Ships,” Int. Conf. Maritime Autonom. Surface Ships, Trondheim, Norway, Nov. 2019. CC BY 3.0.
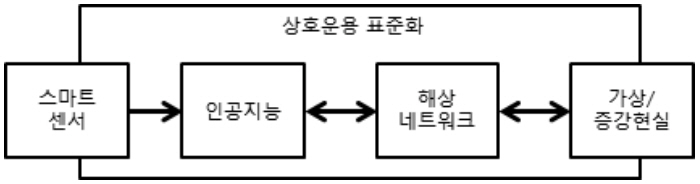
스마트 센서 기술은 선박 주변 상황들에 대한 기본 데이터를 제공하며, 인공지능 기술은 스마트 센서의 정보와 원격운용센터(ROC)에서의 전송된 정보를 바탕으로 선박 제어에 대한 의사결정을 수행한다. 해상 네트워크 기술은 5G 통신기술, 위성통신기술 등을 통해 인공지능 시스템과 ROC 간의 정보 전달 역할을 수행하며, 가상/증강현실 기술은 운용자 친화적인 상호작용 인터페이스를 제공한다. 또한 상호운용 표준화 기술은 디지털 파이프라인 전반에 걸쳐 상호운용 및 호환하기 위한 표준화된 규격을 제공한다.
이러한 혁신 기술을 적용하기 위해서는 새로운 기술적인 도전과 위험에 직면하게 되는데, 기존 선박과 관련된 안전 문제, 물리적, 사이버 보안 위험, 선박 장비의 고장, 정보 전달 관련 오류, 통신 실패에 대한 위험을 제거할 수 있는 충분한 연구와 실증시험이 동반되어야 한다.
EU에서는 인접 지역 국가 특성상 자율운항선박에 대한 단순한 연구개발을 넘어 물류 전송의 효율화를 위해 자율운항선박이 오래전부터 개발되어 왔다.
대표적으로 핀란드는 국영해운사 핀페리와 롤스로이스가 합작으로 2018년 12월에 Falco호가 Nagus항 인근에서 80명을 태우고 약 3.5km를 운항함으로써 세계 최초로 45km 떨어진 육상에서 선박을 원격 제어하고, 최첨단 기술과 통신 인프라를 이용하여 자율운항과 자동 이접안 등의 실증시험에 성공하였다.
노르웨이는 세계 최초 무인 컨테이너 선박 개발 프로젝트인 Yara Birkeland를 발족시키고 2018년에 건조를 시작하였다. 이는 7MWh 배터리 구동 전기 추진의 120 TEU급 선박으로 12km 거리의 1차 운항시험을 성공하였으며, 45km를 운항목표로 하고 있다.
2019년 9월 NYK는 IMO의 ‘자율운항선박(MASS) 실증시험을 위한 잠정 지침’에 따라 7만 톤급 자동차/트럭 운반선에 SSR(Sherpa System for Real ship) 항해 시스템으로 자율운항에 성공하였다고 발표하였다.
이러한 실제적인 자율운항선박 개발이 추진됨에 따라 산업계와 각국의 요구에 따라 IMO의 해사안전위원회(MSC)는 2017년 6월 제98차 회의부터 의제로 채택하고 본격 논의 중이다.
우리나라에서도 산업통산자원부와 해양수산부가 공동으로 2020년부터 2025년까지 6년간 ‘스마트 자율운항선박 및 해운항만 운용서비스 개발사업’을 추진 중에 있다. 본 사업은 기존 선원에 의해 운항되던 선박에 자율운항 지능형·자동화 시스템을 탑재하여 해양사고 절감, 운항효율 극대화를 목적으로 하고 있으며, 표 3과 같이 자율항해 시스템, 자동 기관시스템, 성능실증센터, 검증·운용기술 및 표준화 등의 기술 개발을 목표로 하고 있다.
표 3 세부 사업 내용[10]
IMO의 관점에서는 해상인명안전협약(SOLAS) 선박들이 안전하게 운항하고 해양 환경을 보존하는 것이 목적이고, 선박 이해당사자는 경제적으로 선박을 운항하는 것이 목적이므로 이를 위해 다음과 같은 무인선박 기술 및 ROC 운용 기술 요구사항이 있다[9].
• 비용 효과적이고 높은 수준의 신뢰성을 보장하며 자연친화적인 에너지 및 추진 시스템
• 해적, 밀수, 화물 도난 등을 방지할 수 있는 물리적인 안전장치, 자율선박에 대한 제어권을 얻기 위한 해커의 침입 방지 등의 사이버 보안(physical and cyber security)
• 항해 중인 선박의 시스템 고장은 복구 비용과 운송 지연을 초래하므로 예지보전 및 운용을 가능하게 하는 선박 상태 관리(vehicle health management)
• 화재, 충돌, 기상 악화로부터 발생하는 손상에 대해 손상 정도를 평가하고 ROC의 지시 유무에 관계없이 손상을 수리할 수 있는 선박 로봇 시스템(on-board robotics systems)
• 선박자동식별장치(AIS) 만으로는 충돌 회피에 적합하지 않으므로 장애 및 충돌 가능성을 측정할 수 있는 스마트 센서가 갖추어진 장애 및 충돌 회피 시스템
• 주의가 필요한 사고를 탐지하고 이해할 수 있는 운용자의 상황 인지, 자율선박과의 상황 인지 정보를 교환하기 위한 대역폭을 보장하는 통신기술
• 브릿지 시뮬레이터 등의 훈련 솔루션, 즉 위급 상황 처리 절차, 시스템 오작동, 불순한 일기 상태에 대응할 수 있는 고급 훈련 환경 제공
• 자동화된 항로표지, 자동화된 입출항 등을 위해 해상교통관제센터와 ROC가 밀접하게 통합되어야 하며, 선박에서 발생하는 진단 및 예지 기능과 관련된 주의 및 경고에 대한 실시간 모니터링 기능 제공
Ⅳ. 표준화 동향
ICT 분야에서의 표준화의 목적은 국가 간의 시스템의 상호운용성 확보가 주목적이며, 조선해양산업 도메인에서는 국제적으로 적용 가능한 성능기준을 제정하는 것이 목적이다.
e-Navigation 서비스와 MASS 서비스의 지속적인 운용을 위해서 시기적절하고 신뢰성 있는 정보 흐름이 설정되어야 하고, 서비스에 소요되는 시스템 간에 지속적인 상호운용성이 필요하다. 이러한 상호운용성은 표 4와 같이 다양한 수준과 형태로 나타난다.
표 4 상호운용성 형태와 수준
| 수준 | 형태 | 의미 |
|---|---|---|
| 국가 | •경제성/규정 정책 | 법적/정책적 상호 운용성 |
| •조율된 우선순위와 집중된 목적 | ||
| 기업 | •산업 목적 | 조직적 상호운용성 |
| •사업 목표 | ||
| •조율된 과정과 절차 | ||
| 시스템 | •이해/인지 | 의미적 상호운용 |
| •정보 상호운용 | ||
| •데이터모델 상호운용 | ||
| 네트워크 및 데이터 전송 | •프로토콜 상호운용 | 기술적/구문적 상호운용성 |
| •물리적 상호운용 |
예를 들면, 데이터 전송 수준에서는 시스템이 연결되어 데이터의 교환을 보장해 주는 기술적(Technical) 상호운용성, 시스템 간 교환된 메시지 처리를 보장해 주는 구문적(Syntactic) 상호운용성, 메시지에 포함된 개념을 이해하고 처리하는 의미적(Semantic) 상호운용성이 있어야 한다.
또한, 공통 사업 목적과 목표를 가진 다수의 비즈니스 엔터티 간에 사업적 의미에서의 조율된 과정과 절차에 대한 조직적(Organizational) 상호운용성 및 현지(Local), 지역(Region), 국가, 국제기관이 개별의 경제성, 규정, 기타 정책을 공통의 우선순위와 목표로 전환한 법적/정책적 상호운용성이 있으며, 그 결과는 서로 독립적인 표준, 규정, 지침으로 나타난다.
e-Navigation 기술과 자율운항선박에서의 법적/정책적 상호운용성은 IMO, ITU 등에서 추진하고 있으며, 조직적 상호운용성은 ISO, IEC, IALA, IHO 등의 기관이 추진하고 있고, 시스템, 네트워크 및 데이터 전송과 관련된 상호운용성은 TTA, MCC, NMEA, 국내외 포럼 등에서 추진하고 있다.
1. 성능기준 및 기술기준 제정 기구
e-Navigation 기술과 자율운항선박의 법적 기준과 성능 기준은 IMO 법률위원회(LEG)와 MSC가 결정하며, 해상 통신과 관련한 기술 기준은 ITU-R SG5(지상업무) 소속 WP5B(해상조난안전제도(GMDSS), 항공 이동 서비스, 무선 측위 서비스를 포함하는 해상 이동 서비스) 기술분과가 제시하며, 주파수 자원에 대한 할당은 세계전파통신회의(WRC)를 통해 확정된다.
가. IMO
e-Navigation 기술과 관련한 IMO의 동향은 이미 SIP 수립이 완료되고 각국이 SIP에서 요구하는 해사 서비스 개발이 진행 중이다.
항해 안전 시스템에 대한 논의 및 규정 제안은 항해·통신·수색·구조전문위원회(NCSR)에서 제시하므로 SIP 승인 이후의 진행사항은 다음과 같다[11].
• NCSR 제2차 회의(’15.3): e-Navigation 이행을 위한 3가지 지침인 인간중심설계(HCD), 사용성 평가(UTEA), 소프트웨어 품질보증(SQA) 지침을 ‘e-Navigation을 위한 통합 지침’으로 통일
• NCSR 제3차 회의(’16.3): 국제수로기구(IHO)는 차세대 전자해도(S-100) 표준에 근거하여 공통해사데이터구조(CMDS)의 개발이 필요하므로 통신장비를 통해 수신된 항해 정보의 조화로운 디스플레이를 위한 지침 개발 제안
• NCSR 제4차 회의(’17.3): 선교설계 및 정보 표출의 조화 관련 통합항해시스템(INS) 성능 기준(Res.MSC.252(83)) 개정을 위한 신규 모듈 준비 및 해사서비스 포트폴리오(MSP) 데이터 표준 개발을 위한 IMO-IHO 공동작업반 운영 제안
• NCSR 제5차 회의(’18.3): 항해장비 표준화 모드(S-Mode)에 관한 지침을 완성하기 위한 통신작업반을 구성하고, SIP의 일부 용어, 내용 변경 및 현 진행상황을 반영한 개정안 승인 요청
• NCSR 제6차 회의(’19.1): 항해장비 표준화 모드에 관한 지침(S-Mode) 승인을 요청하고, 해사서비스 형식의 조화와 정의에 관한 지침개발
• NCSR 제7차 회의(’20.1): e-Navigation 해사 서비스 지침 고려사항 논의를 위한 회기 간 회의체 설립을 동의함
자율운항선박에 대한 논의는 IMO MSC와 LEG 위원회에서 규정검토작업(RSE)을 계속 논의 중이며, 자율운항선박의 실증시험을 위한 시범운항 임시 지침을 확정하였다[12].
• MSC 제98차(’17.6): MASS 용어 사용, MASS 사용을 위한 RSE 논의를 2018~2019년 2년 간의 MSC 의제에 포함
• LEG 제105차(’18.4): MASS의 법적 책임, 보상 규약 등의 격차 분석을 목적으로 하는 RSE를 의제로 채택
• MSC 제99차(’18.5): 목표, 목적, 방법론, 대상 협약, 선박의 종류 및 크기, 잠정적인 정의, 다양한 종류와 개념의 자동화, 운영, 인원의 배치 등을 고려한 RSE 작업을 위한 작업반 승인, 4단계의 자동화 단계 정의
• MSC 제100차(’18.12): RSE에 대한 프레임워크 및 RSE에 사용될 검토 서식을 부분적으로 개정, 자율화 정도(degrees autonomy), 검토 대상문서 및 방법론 등에 관한 항목들을 논의하고 개정
• LEG 제106차(’19.3): RSE의 대상협약, 작업체계, 작업계획 등의 프레임워크 합의
• MSC 제101차(’19.6): 1단계 RSE 결과 보고 양식과 작업 범위(TOR) 결정, 9개의 임시지침 개발 원칙에 따라 목표기반의 상위 단계 규정으로 시범운항 임시지침 개발 완료
나. ITU-R SG5
e-Navigation을 구성하는 코어 컴포넌트는 선박, 육상, 통신 인프라로 나눌 수 있으며, 자율운항선박 기술을 구성하는 코어 컴포넌트도 자율선박, ROC, 통신 인프라로 구성된다. 자율운항선박의 통신 인프라는 육상 컴포넌트가 VTS의 기능에서 자율선박을 제어 및 운영하기 위한 기능을 추가한 ROC로 대체되는 것만 다르다고 볼 수 있다.
해상 통신 인프라에 대한 기술기준은 ITU-R SG5 WP5B가 담당하고 있으며, e-Navigation 기술과 관련한 통신기술인 VDES, NAVDAT, Digital HF 등은 우리나라에서도 개발 중이며 기술 기준 표준화를 추진하고 있다.
VDES의 주파수는 위성 VDE 주파수를 제외하고 2015년에 열린 세계전파통신회의(WRC)에서 할당이 완료되었으며, WRC-19에서는 육상 업무 보호를 위해 하향링크에 제약이 있는 선박-위성 간 VDE-SAT 2차 주파수(secondary frequency) 대역(157.1875~157.3375MHz, 161.7875~161.9375MHz)을 할당하고 전파규칙(RR) App.18을 개정하였다[13].
우리나라는 한국선급이 주관하여 ITU-R M.2029-0과 IALA G1139 Ed.2 표준안에 기반한 VDES 기본 시스템(Base station)을 개발 중이며, 응용지정메시지(ASM), 지상 초단파데이터교환(VDE-TER), AIS 수신기, 세계위성항법시스템(GNSS) 수신기로 구성되어 있다[14].
NAVDAT 통신은 전송속도는 12~18kbps, 통신거리는 약 400해리까지 저속의 중장거리 해사안전정보 방송에 활용할 수 있으나 e-Navigation 서비스를 위해서는 별도로 NAVDAT 장비를 선박에 설치해야 한다[15].
MF NAVDAT 기술기준은 ITU-R M.2010-1(2012, 2019), HF NAVDAT 기술기준은 ITU-R M.2058-0(2014)에 정의되어 있으며, 사용 주파수 지정을 완료하였고 송신은 해안국에 한정되어 있다[15].
우리나라의 경우, 육상에서 100km 이상 떨어진 어선의 통신을 위해 아날로그 HF 음성 통신 장치인 단측파대 무선송수신기(SSB)를 사용해 왔으나, 통신 품질을 개선하고자 ITU-R 권고 M.1798-1에 기반한 디지털 HF 시스템을 삼영이엔씨를 중심으로 개발 중이다.
이동통신분야 공동 국제표준을 목적으로 1998년 12월에 설립된 국제 표준화 협력단체인 3GPP는 LTE 기반의 공공안전/재난안전통신(PS-LTE)을 위한 세부 기술규격 개발 및 표준화를 추진 중이며, 5G 시스템에서 해상 통신 서비스를 제공하기 위한 MARCOM 기술규격인 TS 22.119[16]가 승인되었으며, 5G 기반 해상통신은 공공안전 도메인과 해사 서비스 도메인 간에 다음의 공통 특성을 가지고 있다[17].
• 제조사와 솔루션 개발자에게 매력적이지 못한 경제 규모
• 미션 수행에 필요한 자원의 부족 시에도 동작 가능
• 네트워크 단절 시 독립적인 시나리오로 동작 요구
• 네트워크가 없을 때 직접 통신 가능
• 열악한 기후 등 환경 조건에서 동작 가능
이러한 특성으로 볼 때 한국형 e-Navigation 사업에서 공공안전통신망 주파수를 사용하여 구축 시험 중인 초고속해상무선통신망(LTE-Maritime)이 주력 해상통신망으로 자리매김하기 위해서는 공통 특성에 따른 공공망과 상용망의 분리가 필요할 수 있다.
자율운항선박 기술 개발 사업에서는 통신망의 경우 한국형 e-Navigation 사업의 결과를 이용하여 진행되므로 VDES, 디지털 HF 기술을 잘 활용할 필요가 있으며, 자율운항선박에서 안정적인 통신을 보장하기 위한 최신 위성통신기술을 사용하는 것도 하나의 대안이 될 수 있다.
일반 사용자와 관련이 많은 자율해상무선기기(AMRD)의 기술기준은 ITU-R M.2135(2019)에 정의되어 있으며, IMO에서 지정하는 익수자구조 설비(MOB) Class-M, 이동 항로표지(mobile AtoN) 등이 기존의 디지털선택호출(DSC) 및 AIS 주파수를 사용하여 선박의 안전항해를 증진시키는 기기를 Class-A라 분류하고, AIS 기술을 적용하고, VHF Ch.2006(160.9MHz)의 25kHz 대역폭 채널에서 동작하고 출력 100mW 이하, 안테나 높이는 1m 이내로 사용하는 선박의 안전항해와 무관한 기기를 Class-B라 분류하고 있다[14].
2. 국제 표준화 기구
e-Navigation 기술과 자율운항선박 기술 관련 국제 표준화 기구는 IMO MSC에서 제정한 성능 기준의 만족 여부에 대한 시험 방법 및 절차를 제공하는 IEC TC80이 있으며, 스마트 물류와 관련하여 국제 표준을 담당하는 ISO TC8이 자율운항선박 기술의 표준화에 많은 관심을 가지고 있다.
가. IEC TC80
IEC는 IMO의 성능 요구조건을 만족하기 위한 기능 시험 요구사항 및 시험 방법에 대한 표준 제정을 하고 있으며, TC18에서는 이동식 및 고정식 해양구조물(offshore unit)의 전기설비 및 장비 관련 표준, TC80(해상항해 및 무선통신기기와 시스템 전문위원회)에서는 선박용 전기 설비 및 항해 장치들에 대한 표준 및 장치들 간의 인터페이스 표준을 제정하고 있다.
IEC TC80 WG6(항해 장비 인터페이스)에서는 항해장비에 사이버 보안을 고려한 모듈러 개념의 시험 요구사항을 제시하기 위한 IEC 63154 표준을 개발 중이다[18].
IEC TC80 WG17(CMDS)에서는 S-421 항로계획 데이터 모델을 개발 중이며, 자율운항선박 관련해서는 공통 데이터 모델을 위한 항로 관리, 스마트 선박 네트워크, 사이버 보안 등의 표준화를 추진 중이다.
또한 기 발행된 표준에 대한 유지보수를 담당하는 IEC TC80 MT5(IEC 62288 개정)에서는 MSC 제101차 회의의 결과인 ‘선내 항해 디스플레이에서 항해 관련 정보 표현에 대한 성능규격’에 대한 사용자 인터페이스 표준 개정을 추진 중이며, IEC 62288(Display), IEC 62923-1(BAM), IEC62388(Radar), IEC61174(ECDIS), IEC61924-2(INS) 등의 표준에서 AIS ASM, AIS AtoN, MOB 등의 표현에서 상충되는 점을 인지하고 개정할 예정이다[19].
나. ISO TC8
ISO에서의 ICT 관련 표준화는 ISO TC8 조선해양분과(Ships and Marine Technology)에서 수행하고 있으며, SC8(항해 및 선박 운용)에서는 선박 운항에 있어서 항해 기기 및 시스템을 포함한 전반적인 항해 분야, SC16(수송기관통합 근해수송)은 선박 항해 인터페이스, 수송 모드, 복합 수송 기술 분야, WG10(Smart Shipping)은 자율운항선박, 해운, 항만, 네트워크를 포함하는 스마트 선박 관련 분야에 대한 표준화를 담당한다[20].
SC6에서는 해상 데이터 공유를 위한 선박 데이터 서버와 선박 기계장치와 전자 장비를 위한 데이터 표준인 ISO 19847(2018)과 ISO 19848(2018)을 완료하였다.
WG10의 업무는 MASS에 대한 공통 용어와 데이터 모델을 수립하는 하는 것이다. MSC 제100차 회의(’18.9)에 ISO TC8에서 발간된 표준, 개발 중인 표준, 새로운 표준 제안 및 2019년에 검토에 들어간 표준에 대한 최근 현황을 정리하여 의제[21]를 제출하였으며, MSC 제102차(’20.2) 회의에는 RSE에서의 사용될 용어(Automatic, Automation, Autonomous–Autonomy, Autonomous ship system, Remote Control Centre-RCC, Shore Control Centre-SCC, Unattended, Crewless ship)를 정의하는 의제[22]를 제안 중이다.
3. 단체 표준화 기관
가입된 기관 간 상호운용성을 확보하고 성능기준 및 기술기준 제정 기구 및 국제 표준화 기구에 기술 표준을 제시하여 추진하는 표준화 단체로, e-Navigation 기술 및 자율운항선박 기술 분야에는 대표적으로 국제 표준화 기관인 IALA와 국내 표준화 기관인 한국정보통신기술협회(TTA)가 있으며, 다음은 국내외 주요 단체 표준화 동향이다.
가. 국제 단체 표준화 동향
IALA는 1957년에 설립된 국제 비영리 기술협회로 항해자의 요구, 관련 기술 개발 및 각국 항로표지 관련기관과 협력하여 IALA 권고서와 지침서의 발간을 통해 항로표지의 공통된 기준을 개발하는 것이 목표이다.
IALA는 e-Navigation 정책이 본격화되기 전에 이미 AIS 기술을 IMO에 사용하도록 제안하여 모든 SOLAS 선박에 의무 설치하도록 주도하였으며, ENAV(e-Navigation 정보 서비스와 통신) 위원회를 통해서 IMO MSC, ITU-R SG5, IHO 등과 지속적인 성능표준 제정, 기술 표준 제정에 적극 참여하고 있다.
ENAV 위원회는 중대역/광대역 통신인 AIS와 VDES 기술, 협대역 통신인 NAVDAT, MF 비콘 등의 기술에 대한 권고서와 지침서를 제정하였으며, VDES의 성능 표준 제정에 적극 참여하고 있다.
특히, 항로표지 분야의 정보 표준 개발을 위해 국제수로기구(IHO)의 S-100 표준을 적용한 VTS 간 정보교환포맷(IVEF) 등의 S-2X0 제품 표준(product specification)을 개발 중이며, ASM 등의 데이터 모델과 데이터 엔코딩, 선박 추적과 데이터 교환 시스템에 필요한 정보 서비스, e-Navigation 사용자 요구사항에 대한 지침도 지속적으로 개발하고 있다[23].
ARM(항로표지 요구사항 및 관리) 위원회는 2018년부터 2022년까지 항해 요구사항, 정보 서비스 및 묘화(portrayal), 위험 관리에 대한 작업 계획을 가지고 활동하고 있다[24].
e-Navigation 해사 서비스는 각 서비스에 대해 서비스 제공자와 선박 내 응용 간을 직접 연결하지 않고 해사 연결 플랫폼(MCP)을 통해서 설정 및 제공이 가능하다. MCP는 해사 서비스 레지스트리(Registry)와 보안 해사 메시징 서비스로 구성되며 인증, 권한부여, 암호화를 통해 사이버 보안 기능을 제공한다. 이러한 MCP를 관리하는 MCP 컨소시움(MCC)은 e-Navigation 기술 서비스 규격인 IALA G1128 지침을 표준화하여 제공하고 있다.
나. 국내 단체 표준화 동향
국내에서 국제 표준 기관에 대한 대응으로는 IMO는 해양수산부가 ITU-R SG5는 과학기술정보통신부 국립전파연구원이 ISO TC8, IEC TC80은 산업통산자원부 국가기술표준원이, 국제비정부기구(NGO)인 IALA는 해양수산부뿐만 아니라 연구기관, 조선해양 산업체 등 다양한 이해당사자가 참여하여 상호 운용하기 위한 표준을 적극 개발하고 있다.
TTA는 단체 표준 제정, 보급 및 시험인증 지원을 위하여 설립된 기관으로 e-Navigation 기술과 자율운항선박 기술 관련 표준 추진은 TTA 내 스마트자율운항선박 프로젝트그룹(PG607), 특수통신 프로젝트그룹(PG903), 스마트자율운항선박포럼이 추진하고 있으며, TTA 이외의 한국자율운항선박포럼, K-MCP포럼 등이 TTA 단체 표준 개발에 참여하고 있다.
또한 TTA에서는 해당 분야 전문가가 표준 전략맵 회의를 통해 매년 중점 표준화 항목을 선정하고 있다. 표 5는 2020년에 제정을 목표로 선정된 중점 표준화 항목이며, 항목은 크게 ROC와 자율선박 간의 연동을 위한 자율운항선박 제어 기술과 통신 인프라 기술인 해상 연결성 기술로 구분된다.
표 5 상호운용성 형태와 수준[25]
중점 표준은 국제 표준개발기관(SDO)에서의 표준 제정을 목표로 하고 있으며, 해상위성통신 시스템 표준을 제외한 항목의 대부분은 국제 표준화가 진행 중이거나 마무리 단계에 있다.
Ⅴ. 결론
조선해양산업에서 ICT 기술을 융합한 e-Navigation 기술 및 자율운항선박의 출현은 운용비용의 감소, 안전 증진, 전기추진 시스템과 같은 기술에 의한 환경 영향을 최소화하는 기회를 제공하고 있다.
e-Navigation 기술은 조선해양산업에 ICT를 초기 접목하기 위한 기술개발이므로 정부 주도로 추진되는 것이 타당한 것으로 판단되나, 조선해양산업의 발전을 위해서는 글로벌한 기술개발이 필요한 상황에서 한국형 기술개발에 초점을 맞춘 것은 부적절하다고 볼 수 있다.
특히, LTE-Maritime 개발은 공공 도메인과 해사 상용 도메인이 상호 보완하여 최상으로 활용될 수 있도록 개발되어야 하며, VDES 개발도 자율운항선박의 도래에 대비하여 관련 요구사항이 미리 반영된 설계와 개발이 되어야 할 필요가 있다.
자율운항선박 기술은 국제적으로 보면 물류 전송의 효율화를 도모하기 위하여 실선(Real ships) 중심, 상용화 중심의 기술개발과 실증시험을 계속해 왔는데 비해, 우리나라는 2m 이상 물체 100% 인식, 3척 이상 자동 100% 충돌회피, 연비 10% 이상 향상, 100% 자가진단 및 장애 복구라는 다소 연구개발 비전 지향적인 목표를 가지고 추진되고 있다.
국제적 자율운항선박 기술 개발 흐름에 맞추기 위해서는 우리나라의 이해당사자의 실정에 맞는 자율운항선박 기술 개발 목적과 목표를 설정하고, 국내에서 개발된 기술을 최대한 활용할 수 있도록 민간 주도적인 기술개발과 한국형 자율운항선박 시스템 구축이 필요하다.
표준화 추진도 국가 수준의 상호운용성을 위한 성능 표준 등의 활동에도 적극 참여하여야겠지만, 국제 표준화의 일차적인 목적이 개발된 기술의 상용화 시점에서 시장 선점이므로, 표준화 실적 확보를 위한 표준화 추진보다는 기 개발된 기술 및 개발 중인 기술로 국내 및 국제 상용 표준을 선도할 수 있도록 기술개발과 연계된 표준화 추진이 필요하다.
용어해설
해상 싱글윈도우(MSW) 해상무역과 물류에 참여하는 선사, 화주, 포워더 등 이해당사자가 선박의 입출항, 수출입, 환적 등을 효율적으로 처리하기 위해 표준화된 정보나 문서를 단일 창구를 통해 한 번에 제출하는 시스템
e-Navigation 정의 해양에서의 안전과 보안, 해양 환경 보호를 위해 선박의 출항부터 입항까지 항해 및 관련 서비스를 증진시키기 위해 전자적 방법으로 선박과 육상에서 해상 정보를 수집, 통합, 교환, 표현 및 분석하여 조화롭게 활용하기 위한 체계
MASS 정의 다음의 자율성 수준을 가진 선박
수준 1: 자동화된 절차 및 선원의 의사결정 지원 선박
수준 2: 선원이 승선하여 원격으로 제어되는 선박
수준 3: 선원의 승선 없이 원격으로 제어되는 선박
수준 4: 완전 무인 자율 제어 선박
약어 정리
3GPP
3rd Generation Partnership Project
AIS
Automatic Identification System
AMRD
Autonomous Maritime Radio Devices
ASM
Application Specific Messages
AtoN
Aids to Navigation
CMDS
Common Maritime Data Structure
DCB
Domain Coordinating Body
DSC
Digital Selective Calling
FAL
Facilitation Committee
GMDSS
Global Maritime Distress and Safety System
GNSS
Global Navigation Satellite System
HCD
Human Centered Design
IALA
International Association of Lighthouse Authorities
IEC
International Electrotechnical Commission
IHMA
International Harbour Masters Association
IHO
International Hydrographic Organization
IMEA
International Marine Electronics Alliance
IMO
International Maritime Organization
IMPA
International Maritime Pilots’ Association
ISO
International Organization For Standardization
ITU
International Telecommunication
ITU-R
ITU Radiocommunication Sector
IVEF
Inter VTS Exchange Format
LEG
Legal Committee
LTE
Long Term Evolution
MASS
Maritime Autonomous Surface Ships
MCC
MCP Consortium
MCP
Maritime Connectivity Platform
MOB
Man OverBoard
MS
Maritime Service
MSC
Maritime Safety Committee
MSI
Maritime Safety Information
MSP
Maritime Service Portfolio
MSW
Maritime Single Window
NAVDAT
Navigational data
NCA
National Competent Agency
NCSR
Navigation, Communications and Search and Rescue
NGO
Non-Governmental Organization
NMEA
National Marine Electronics Association
ROC
Remote Operations Center
RR
Radio Regulations
RSE
Regulatory Scoping Exercise
SAR
Search and Rescue
SDO
Standards Developing Organizations
SIP
Strategic Implementation Plan
SOLAS
International Convention for the Safety of Life at Sea
SQA
Software Quality Assurance
SSB
Single SideBand
TOR
Terms of References
TTA
Telecommunications Technology Association
UTEA
Usability Testing, Evaluation and Assessment
VDE
VHF Data Exchange
VDES
VHF Data Exchange System
VHF
Very High Frequency
VTS
Vessel Traffic Service
WMO
World Meteorological Organization
WRC
World Radiocommunication Conference
한국해양수산개발원 IMO 국제해사 정책동향, "IMO, 글로벌 해상 싱글윈도우(Maritime Single Window) 시스템 도입," vol. 29, May. 2019.
F. Pot, "How will e-Navigation Maritime Services be delivered to ships?" Digital Ship, Oct./Nov. 2019, p. 34.
K. Heffner and Ø. J. Rødseth, "Enabling Technologies for Maritime Autonomous Surface Ships," in Proc. Int. Maritime Port Technol. Development Conf. Int. Conf. Maritime Autonomous Surface Ships, Trondheim, Norway, 13–14 Nov. 2019, pp. 1-12.
한국선급, "Briefings of IMO," http://www.krs.co.kr/kor/tech_infor/list.aspx?tec_code=12&s_code=0403030000.
3GPP, "Maritime Communication Services over 5G systems," www.3gpp.org/news-events/2006-maritime2, Dec. 19, 2018.
Hyounhee Koo, "Strategic collaboration among vertical domains," ICTC 2019, Special Session: 5G+Critical Communications, 17th October 2019.
ISO, "Status of recent standards activities of the ISO Technical Committee on Ships and Marine Technology (ISO/TC 8) related to the work of the Maritime Safety Committee," MSC 100/19/7, 28 September 2018.
ISO, "Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (mass)," MSC 102/5/18, 11. February 2020.
그림 1
자율선박시스템 디지털 파이프라인[9]
출처 K. Heffner and Ø.J. Rødseth, “Enabling Technologies for Maritime Autonomous Surface Ships,” Int. Conf. Maritime Autonom. Surface Ships, Trondheim, Norway, Nov. 2019. CC BY 3.0.
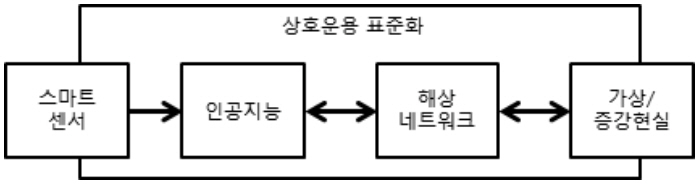
표 1 지역상황 적용 서비스 제공자[6]
표 2 연구 과제[7]
출처 한국형e-Navigation사업단 연구과제, www.smart-navigation.org/html/Research_New/core_task.php.
표 3 세부 사업 내용[10]
출처 산업통상자원부, 해양수산부, “자율운항선박 기술개발 사업,” 자율운항 선박기술개발 사업설명회, 예비타당성 조사결과 2019. 12. 09에서 발췌하여 구성
표 4 상호운용성 형태와 수준
| 수준 | 형태 | 의미 |
|---|---|---|
| 국가 | •경제성/규정 정책 | 법적/정책적 상호 운용성 |
| •조율된 우선순위와 집중된 목적 | ||
| 기업 | •산업 목적 | 조직적 상호운용성 |
| •사업 목표 | ||
| •조율된 과정과 절차 | ||
| 시스템 | •이해/인지 | 의미적 상호운용 |
| •정보 상호운용 | ||
| •데이터모델 상호운용 | ||
| 네트워크 및 데이터 전송 | •프로토콜 상호운용 | 기술적/구문적 상호운용성 |
| •물리적 상호운용 |
출처 K. Heffner and Ø.J. Rødseth, “Enabling Technologies for Maritime Autonomous Surface Ships,” Int. Conf. Maritime Autonom. Surface Ships, Trondheim, Norway, Nov. 2019. CC BY 3.0.
표 5 상호운용성 형태와 수준[25]
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.