권오천 (Kwon O.C.)
이승준 (Lee S.J.)
김정숙 (Kim J.S.)
김우진 (Kim W.J.)
윤대섭 (Yoon D.S.)
이인환 (Lee I.H.)
Ⅰ. 서론
도로교통공단의 교통사고분석시스템 자료에 따르면, 2011년부터 2015년까지 대한민국 교통사고 발생요인 중에서 ‘안전운전 의무불이행’ 요인이 56.2%(1,116,207건 중 627,417건)로 과반수 이상을 차지하고 있어 운전자 인적 요인에 의한 교통사고 예방이 계속적으로 필요함을 알 수 있다[1]. 전 세계적으로 교통사고 해소 등의 사회적인 문제를 해결하기 위하여 자율주행차량 상용화에 대한 연구가 활발히 진행되고 있다. 미국 SAE(Society of Automotive Engineers, 미국자동차기술자협회)는 자율주행차량 유형을 레벨 0∼5까지 구분되고, 운전자 역할은 자율주행 레벨에 따라 달라진다[2]. SAE J3016을 살펴보면, 그림 1과 같이 레벨 3까지가 운전자의 역할이 강조되고 레벨 4 이상에서는 운전자의 개입이 없어진다. 레벨 2와 레벨 3에서는 자율주행시스템이 자동으로 운전하거나 운전자에 의한 수동 운전이 가능하므로 운전자는 언제든지 운전할 수 있는 준비가 되어 있어야 한다.

레벨 3 차량에서는 자율주행시스템(ADS: Automated Driving System)과 운전자가 교대로 차량을 운전할 수 있는데, 운전자로부터 ADS로 제어권이 전환될 때는 안정적으로 진행되지만, 자율주행차량 스스로 달리다가 특정 상황으로 인해 운전자에게 수동운전을 요구하는 제어권전환(TOR: Take Over Request)이 일어나는 과정에서는 운전자의 준비상태에 따라 위험에 노출되어 사고가 발생할 위험성이 존재한다. 따라서 ADS로부터 운전자로 제어권이 전환되는 경우에 대한 연구가 필요하다.
최근 자율주행차량의 등장으로 운전자들이 자율주행 기능을 사용함에 따라 자율주행 관련 사고가 발생하고 있다. 2018년에 테슬라 차량의 운전자가 자율주행기능인 오토파일럿을 켠 채 스마트폰 게임을 하던 중 운전자 사망 사고가 발생했다. 미국 연방교통안전위원회(National Transportation Safety Board)는 차량 사고 조사를 통해 자율주행 중 운전자 상태 모니터링 기능 부재도 주요 원인 중 하나로 판단하였다. NHTSA는 SAE International과 협력하여 레벨 2 차량의 운전자 모니터링 시스템 성능 표준을 개발하고 레벨 2 자동화 기능을 갖춘 모든 신형 승용차에 이러한 표준을 충족하는 시스템을 장착할 것을 권고하였다[4]. 이렇게 자율주행 차량을 이용하는 운전자가 자율차량 기능에 대한 신뢰가 높아 운전이 아닌 다른 태스크를 수행하다가 다시 수동운전에 참여하기 어려운 상황이 발생하는 위험성이 존재하므로 레벨 2/레벨 3 자율주행차량의 안전한 제어권전환을 위해 인적 요인 가이드라인에 대한 연구가 필요하다.
Ⅱ. 자율주행자동차 가이드라인 동향
1. 미국 자율주행자동차 가이드라인
미국은 자율주행자동차 도입과 안전에 관련한 가이드라인(Automated Driving Systems: A Vision for Safety)을 매년 발표하고 있다. 2016년 9월에 NHTSA가 발표한 V1.0에서는 “Federal Automated Vehicles Policy”라는 자율주행차량 개발을 위한 가이드라인을 세계 최초로 발표하였고, 자율주행차량에 대한 최소한의 가이드라인을 제시하였다[5].
2017년 9월에 NHTSA가 발표한 V2.0에서는 자율주행 차량기술의 안전성에 대한 자발적 지침(Voluntary Guidance)과 주정부에 대한 기술지원(Technical Assistant to States)에 대한 내용을 제시하였다. SAE 레벨 3부터 레벨 5까지 12개의 안전설계요소(12개의 자발적 지침)를 포함한다[6].
• 시스템 안전성(System Safety)
• 운영설계 범위(ODD: Operational Design Domain)
• 사물 및 사건 감지 대응(Object and Event Detection and Response)
• 최소위험 요건(Fallback, Minimal Risk Condition)
• 검증 방법론(Validation Method)
• 인간/차량 간 인터페이스(Human Machine Interface)
• 차량 보안(Vehicle Cyber Security)
• 충돌사고 내구성(Crash Worthiness)
• 충돌사고 후 ADS 동작(Post-Crash ADS Behavior)
• 데이터 기록(Data Recording)
• 사용자 교육과 훈련(Consumer Education and Training)
• 연방정부/주정부/지방정부법규(Federal, State and Local Laws)
특별히 인적 요인과 연관된 Human Machine Interface(HMI)를 위한 가이드라인으로 다음 내용을 제시하였다.
• ADS는 운전 기능을 수행함과 동시에 운전자와 동승자에게 ADS의 의도 및 차량 성능 관련 정보를 정확하게 전달해야 함
• 자율주행자동차 관련 기업들은 HMI 설계 평가, 시험, 검증 절차를 문서화해야 함
• 빠른 기술발전속도를 감안해 ISO(International Organization for Standardization), SAE, 미국표준협회(ANSI: American National Standards Institute) 등 유관기관들의 자발적 지침, 모범 관행, 설계원칙을 검토하고 적용
• 기업들은 운전자가 전체 운전 작업을 수행하기 위한 운전자 인지 및 준비도를 평가하기 위해 운전작업에 포함시킬 수 있는 운전자 모니터링을 포함해야 함
• HMI 설계 시 고려 대상은 운전자, 운행자, 동승자, ADS가 인터랙션할 수 있는 외부 객체들, ADS 미장착 차량, 오토바이, 자전거 및 보행자들을 포함해야 함
2018년 10월에는 NHTSA가 아닌 미국 전체 교통관련 업무를 총괄하는 국토부(DOT: Department of Transportation)에서 V3.0을 발표하였다[7]. V2.0의 기업을 위한 가이드라인보다는 자율주행차량의 상용화에 따른 미국 정부의 원칙과 전략 그리고 관계 부서의 역할 등을 고려한 가이드라인을 제시하였다. 다음은 대중 및 기업과 함께 협의하며 협력할 수 있는 6개의 자동화 원칙에 대한 내용이다.
• 안전성 우선(Prioritize Safety): 자동화는 차량 운행자, 동승자, 보행자, 자전거, 모터 사이클리스트를 위한 안전성을 개선해 주지만, 새로운 안전 위험을 가져올 수 있어 DOT는 이러한 잠재적인 안전 위험을 해결해야 함
• 기술 중립(Technology Neutral): 안전, 모빌리티 및 경제적 목표를 달성하기 위한 수단으로 경쟁과 혁신을 촉진하기 위해 융통성 있고 기술 중립적인 정책들을 채택
• 규정의 현대화(Modernize Regulations): 자율주행 차량의 발전을 불필요하게 방해하거나 주요 안전 니즈를 해결해 주지 않는 오래된 규정을 현대화
• 일관된 규정(Consistency Regulatory)과 운영 환경 추구: DOT는 자율주행 차량이 범국가적으로 운영되도록 일관된 규정을 촉진하며, 주정부와 지방 교통 에이전시 및 산업 주체들과 기술표준 관련 컨센서스 구축
• 자동화를 위한 선제적 준비(Prepare Proactively for Automation): DOT는 여러 파트너 계획들을 지원하기 위해 자율주행을 위한 가이드, 모범사례, 파일럿 프로그램과 다른 도움을 제공하며, 다이내믹하고 융통성 있는 미래를 위한 투자
• 미국인의 자유를 보호 및 향상(Protect and Enhance the American’s Freedom): DOT는 미국인들과 교통 약자(장애인과 고령자)들의 차량을 운행할 수 있는 개방형 도로에 대한 이용의 자유를 제공
2020년 1월에는 백악관과 US DOT가 공동으로 V4.0을 발표하였다[8]. V4.0에서는 미국 정부 차원의 자율주행차량 기술에 대한 10가지 원칙을 다음과 같이 제시하였다. 단순히 자율주행차가 아닌 미국인의 안전, 보안, 사생활, 자유를 보장하기 위해 미국 행정부가 노력하고 자율주행차량 산업에서 미국의 역량이 전방위적으로 보여줄 대상이 됨을 나타냈다. 또한 미국 38개 연방 기관과 모든 사회 기관과의 협력을 통해 발표한다는 것을 강조하였다.
• 사용자 및 커뮤니티 보호를 위해 안전 우선
• 보안 및 사이버 보안 강조
• 개인정보보호 및 데이터 보안 보장
• 이동성 및 접근성 향상 원칙
• 효율적인 시장 홍보를 위한 기술 중립 유지
• 미국의 혁신과 창의성 보호
• 규정 현대화
• 일관된 표준 및 정책 홍보
• 일관된 연방접근 방식 보장
• 교통 체계 수준의 효과 개선
2. 독일 가이드라인 동향
독일은 도로교통법(Road Traffic Act Amendment for AV(Automated Vehicle): Straßenverkehrsgesetz(StVG))을 개정하여 운전자 탑승을 전제로 2017년 6월에 자율주행을 합법화한 최초의 국가이다[9]. 독일 의회는 도로상에서 자율주행차량의 운전을 허용하는 법률을 승인하였으나 해당 법률은 비상 시 제어를 위해 항상 운전자가 자율주행차량에 탑승해야 함을 언급하고 자율주행차량에는 운행/시험 여정을 기록하기 위한 블랙박스의 탑재를 의무화하여 사고 시 책임 소재를 위해 운전자나 자율주행시스템 중 누가 차량 제어를 했는지를 식별하도록 했다.
독일의 도로교통법상 고도/완전 자율주행기능을 가진 자동차는 SAE J3016 기준으로는 레벨 3과 레벨 4에 해당하고 차량 제조업체는 자율주행 차량이 다음의 기능을 가진 장비를 탑재한 시스템 설명을 제공해야 한다.
• 운행 제어(종횡 조작 및 차량 제어)
• 차량 운행 가이드에 제시된 교통 규정 준수
• 운전자에 의해 어느 때라도 수동으로 전환되거나 정지
• 운전자에 의해 수동차량제어 필요성을 인지
• 운전자에게 차량 제어권을 넘겨주기 전 충분한 시간을 가지고 차량제어권의 요구사항을 시각적, 청각적, 촉각적 또는 식별 가능하게 운전자에게 표시
• 시스템 설명과 반대되는 사용을 고지
자율주행 제어권전환과 관련된 규정에 따르면 운전자는 고도/완전 자율주행 기능에 의해 차량을 운행하는 동안 항상 지각력(Perceptive)을 가지고 다음의 어느 때라도 차량 제어권을 즉시 넘겨받을 수 있어야 한다.
• 고도/완전 자동화 시스템이 운전자에게 차량 제어권을 넘겨받도록 요청 시
• 운전자가 분명한 상황에서 고도/완전 자율주행 기능의 의도된 사용을 위한 전제조건들이 더 이상 존재하지 않는다는 것을 인식하거나 깨달을 때
차량은 운전자와 고도/완전 자율시스템 간에 차량 제어권전환 발생 시, 내비게이션 시스템에 의한 위치 및 시간 정보를 저장하고, 차량(일반, 자율주행차) 소유자는 차량 사고 시 제3자에게 저장된 정보를 제공해야 한다. 자율주행 등록 시스템은 기존 법규하에서 고도/완전 자율주행차량 내 데이터의 처리를 수행하기 위한 대응책으로 데이터의 저장을 유지해야 한다.
3. 일본 가이드라인 동향
일본 국토교통성은 2017년 12월에 자율주행차량 안전대책검토 워킹 그룹을 설립, 2018년 4월에 자율주행 가이드라인을 공지할 계획을 세우고 2018년 6월에 가이드라인에 대한 Public Comment를 개시한 후, 2018년 9월에 “자율자동차의 안전기술 가이드라인”을 발표하였다[10]. 일본은 세계 최초로 자율주행에 대한 안전목표를 설정하여, 자율주행자동차의 개발 및 상용화의 의의를 명확히 하고자 했다. 안전목표는 “자율주행시스템이 일으키는 인명 피해사고가 0이 되는 사회실현”이다. 일본 국토교통성에서는 레벨 3/레벨 4 자율주행차량이 갖추어야 할 안전요건을 표 1과 같이 규정하였다.
표 1 일본 자율주행 안전 가이드라인[10]
안전 가이드라인은 유엔 유럽 경제 위원회(UNECE: United Nations Economic Commission for Europe) WP29인 “자동차 기준 조화세계 포럼”에 신설된 GRVA(Working Party on Automated/Autonomous and Connected Vehicles, 자동운전) 분과에서 자율주행 안전 기준을 설립하기 위한 참고 사례로 활용되고 있다.
4. UNECE WP29
UNECE의 WP29 산하 자동/자율·커넥티드 차량 실무그룹인 GRVA는 자율주행차량 UN 기준을 제정하는 기관이다[11]. 특히, GRVA의 FRAV(Functional Requirements for Automated/Autonomous Vehicles)에서는 전후방 제어, 주변환경 모니터링, 최소 위험운전(MRM: Minimum Risk Maneuver), 제어권전환, HMI, 운전자 모니터링 등 자율주행에 요구되는 기능에 대한 UN 안전기준을 제정 또는 개정하려는 논의를 진행하고 있다. GRVA의 VMAD(Validation Method for Automated Driving)에서는 시뮬레이션, 테스트 코스와 같은 새로운 안전성능 확인방법에 대한 UN 안전기준을 제정 또는 개정을 하고 있다.
5. ISO 국제 표준 동향
전 세계 표준화를 담당하는 국제표준화기구 ISO에서는 기술위원회 TC22(road vehicles)와 TC204 (Intelligent transport system)에서 자율주행차량 관련 표준을 진행하고 있다. TC22 산하 소위원회 TC22/SC31에서는 차내 통신, TC22/WC32에서는 전장제품, TC22/SC39는 주행환경 및 자율주행시스템과 운전자 간의 인터랙션, TC22/AG는 자율주행 애드혹 시스템(ADAG: Automated Driving Ad hoc Group)에 대한 표준화를 진행하고 있다. 도시 및 농촌 지상 교통 분야의 정보, 통신 및 제어 시스템 표준화를 진행하는 TC204 산하 작업그룹 TC204/WG3에서는 정밀지도, TC204/WG14에서는 노변 및 자율주행차량을 위한 경고 및 차량제어, TC204/WG16에서는 차량 간 통신, TC204/WG17에서는 노매딕 장치를 이용한 자율 주행 차량 거동 정보 수집에 대한 표준화가 진행 중이다.
자율주행시스템 인적 요인 관련 표준으로는 ISO/TR 21959: Human Performance and State in Context of Automated Driving이 있다. ISO/TR 21959는 자율주행차량 제어권전환 시에 인간운전자의 제어권전환 성능과 상태를 기술하기 위한 개념 모델과 성능평가 방법에 대해서 표준화된 방법을 제안하였다[12,13].
6. 유럽 AdaptiVe 프로젝트
유럽 AdaptiVe(Automated Driving Applications and Technologies for Intelligent Vehicles) 프로젝트는 독일 Volkswagen 주관으로 Volkswagen, Daimler, Renault, Volvo, Ford, Continental 등의 주요 자동차 회사를 포함한 8개국 28개 파트너가 참여하여 2014년 11월~2017년 6월까지 수행한 프로젝트이다[14]. AdaptiVe 프로젝트는 도심지 내 자율주행 기능 현실화를 위해 운전 환경과 운전자 상태 인식 및 컨 텍스트 해석 능력을 크게 향상시키기 위한 인적 요인 연구, 법규, 시장 개척과 관련된 이슈를 폭넓게 다루었다. 자율주행차량시스템의 인적 요인 권장 사항은 에이전트(Agent) 상태, 인식정보(Awareness), 중재정보(Arbitration), 활동정보(Action)와 관련한 가이드라인을 제시하고 있다[14].
7. 대한민국 자율주행차량 기준안
대한민국 국토교통부는 2019년 12월에 세계 최초로 “자동차 및 자동차부품의 성능과 기준에 관한 규칙”(「국토교통부령」 제577호)의 [별표 27] “부분 자율주행시스템의 안전 기준”을 공지함에 따라 2020년 7월부터는 운전자가 운전대를 잡지 않더라도 자율주행시스템이 스스로 안전하게 차선을 유지하면서 주행하고 긴급 상황 등에 대응하는 자동차로유지 기능이 탑재된 레벨 3 자율주행차량의 국내 출시 및 판매가 가능해졌다. 국내 안전기준은 국내의 자율주행차량이 반드시 지켜야 하는 규제사항이며, 표 2의 내용으로 구성되어 있다[15].
표 2 부분 자율주행시스템의 안전기준[15]
Ⅲ. 자율주행차량의 인적 요인 연구
TRB(Transport Research Board)는 자율주행 차량의 인적 요인 연구를 수동운전 재참여, HMI 설계, ADS 오용, 운전자 모니터링, ADS 개인화 분야에 대해 먼저 진행해야 한다고 제시하고 있다[16].
1. 운전자의 수동운전 재참여
레벨 2 및 레벨 3 자율주행 차량에서는 운전자가 효율적이고 신속하게 다시 운전할 수 있도록 재참여시키는 방법과 운전자가 차량의 수동 제어를 성공적으로 회복(Regain Manual Control)하는 데 필요한 시간에 대한 연구가 필요하다.
제어권전환이 요구되는 시점에서 교통 밀도, 운전자 경험, 운전 이외의 태스크 수행 등의 조합에 의해 영향을 받을 가능성이 있다[17]. 운전자의 수 동운전으로 다시 참여하는 시간은 5~7초가 걸릴 수 있다[18,19]. 전환이 일어나면 운전 행동을 안정시키기 위해 30~40초가 더 필요할 것이라고 제시한다[20]. 특히 예기치 않은 자동화 시스템 기능 실패 상황에서 제어권전환을 예측할 수 없는 경우 안정화 시간이 더 필요하다. 따라서 실생활에서 주행하면서 운전자가 다시 수동운전에 참여하는 데 필요한 시간을 확인해야 하며, 연령 및 운전 경험과 같은 변수가 수동운전에 다시 참여할 때의 품질과 타이밍에 어떤 영향을 주는지 연구해야 한다.
2. 차량에서의 HMI 설계 영역
자율주행 중에는 HMI가 운전자를 운전 과제에 참여시키고 차량 상태 및 도로 교통 상황을 인식하게 하는 것이 중요하다. 운전자가 자율주행 중 당황하는 상황을 방지하기 위해 HMI는 눈에 잘 띄고 모니터링하기 쉽게 인체 공학적으로 적절한 방식으로 자동화 상태 및 제한 사항을 언제나 명확하게 전달해야 한다[21]. HMI는 운전자가 상황인지를 유지하게 해야 하며, 운전자가 ‘Out-of-the-Loop’에 빠지지 않게 하는 것이 중요하다. 이는 자율주행 실패 상황에서 수동운전 재참여(Re-engagement)를 어렵게 할 수 있기 때문이다[18].
자율주행 자동시스템 장애가 임박한 경우, HMI는 정보의 긴급성과 운전자 부하를 주의하여 균형 잡을 수 있도록 수동운전 전환 요청 신호를 보낼 필요가 있다. HMI 설계와 제어권전환 상황 사이의 상호작용을 계속 연구하여 안전 운전을 보장할 수 있도록 ADS 상태 및 제한 사항이 가장 최적의 방법으로 운전자에게 전달되도록 해야 한다.
3. ADS 오용 및 운전자 모니터링
운전자는 자율차량의 설계능력을 벗어나 잘못 사용할 수 있다. 운전자는 ADS에 너무 많은 신뢰를 가질 수 있으며 다른 태스크에 참여하는 것이 안전하다고 느낄 수 있다. 어떤 태스크는 수동운전 재참여하기에 어려울 수 있고 자동차를 위험하게 조작할 수 있다. 이러한 ADS 오용문제는 안전 운전을 저해할 수 있다[21]. 따라서 ADS를 잘못 사용하는 것에 대한 대책으로 어떻게 교육하고, 훈련시키고, 라이선스를 발급해야 하는지 파악하는 연구가 필요하다.
운전자가 ADS를 오용하고 산만하거나 부주의하게 되는 경우 운전자 상태 평가 기술(DSA: Driver State Assessment)을 통해 산만과 부주의를 해결해야 한다. DSA는 운전자의 각성도(Alertness) 및 주의 수준(Attention level)을 실시간으로 모니터링하여 운전자의 관심을 운전 과제에 재조정(Reorienting)한다.
Ⅳ. ETRI 인적 요인 가이드라인 연구
국토교통부는 2017년 4월부터 교통물류연구사업으로 “자율주행자동차 차량·운전자 제어권전환 안전성 평가기술 및 사회적 수용성 연구” 1단계 프로젝트로 자율주행자동차 제어권전환 안전성 평가기술 개발, 자율주행자동차 기반 인적 요인 심층 연구, 자율주행자동차 사회적 수용성 향상 기반 기술 연구, 자율주행자동차 제어권전환 안전성 평가플랫폼 개발에 대한 내용으로 진행하고 있다[3].
ETRI 인지·교통ICT연구실에서는 “자율주행자동차(SAE 레벨 2, 3) 기반 인적 요인 심층 연구”를 수행하고 있다[3]. 자율주행 상황(SAE 레벨 2, 3)에서의 제어권전환 안전성 확보와 제어권전환 지원 시스템 개발을 위한 인적 요인 심층연구 및 운전자 심리·행태 정보분석 기술 개발을 목표로 한다. 이를 위해 ETRI는 제어권전환 성능에 영향을 미치는 인적 요인 실험을 다음과 같이 진행하고, 제어권전환 시스템 설계를 위한 인적 요인 가이드라인을 개발하였다[24-30].
• 시각 및 인지적 부하에 따른 제어권전환 인적 요인 특성 실험
• pre-cue 제공에 따른 제어권전환 인적 요인 특성 실험
• 상황정보 제공에 따른 제어권전환 인적 요인 특성 실험
• 운전이 아닌 이차과제 유형에 따른 제어권전환 인적 요인 특성 실험
• 계획된/비계획된 상황에 따른 시각, 청각, 촉각 인터랙션장치 사용에 따른 제어권전환 인적 요인 특성 실험
• 운전준비도에 따른 제어권전환 인적 요인 특성 실험
• 제어권전환 이후 전방 차량 멈춤에 대응하는 운전자 성능 실험
• 전방 보행자 출현 상황에 대응하는 운전자 성능 실험
1. 제어권전환 인지 및 행동반응 모델
ETRI는 운전자 반응과 차량 거동 정보를 이용하여 자율주행에서 수동주행으로 제어권전환이 발생할 경우 NDRT(Non-Driving Related Tasks)에 따른 반응시간을 그림 2와 같이 T1, T2, T3, Time Budget으로 구분하여 인적 요인 특성을 분석하였다[24-30].

• T1: TOR 자극을 인지하고 반응하는 시간
• T2: TOR 정보를 분석하고 수동전환할 때까지의 정보처리 시간
• T3: 운전자가 수동전환 후 운전이 안정화될 때까지의 시간
• Time Budget: T1 + T2 + T3 총 합
2. 인적 요인 가이드라인 구성
ETRI가 제안하는 가이드라인은 미국, 독일, 일본 등의 자율주행차 가이드라인, ISO 국제 표준, 국내 자율주행자동차 기준안, AdaptiVe 프로젝트, ETRI 자율주행 제어권전환 인적 요인 특성 실험 결과 등을 참조하여 SAE 레벨 2/레벨 3 차량을 대상으로 제어권전환 시스템이 운전자, 차량, 환경관점에서 고려해야 하는 사항에 대해 도출하였다.
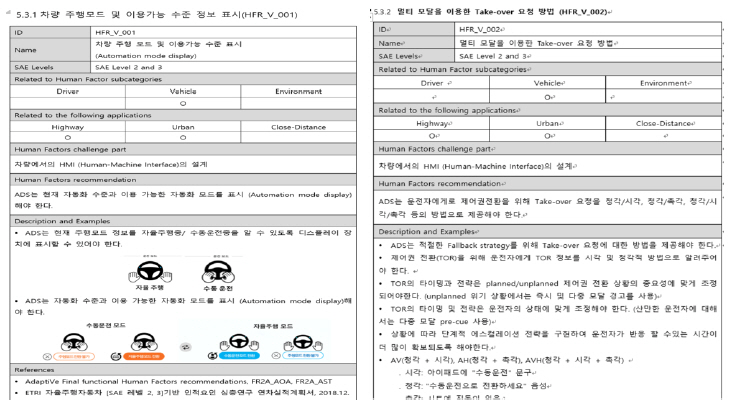
자율 주행 차량 시스템과 관련된 인적 요인 고려사항은 계속 보완되어야 하는 특성이 있으므로 본고에서는 ‘요구 사항(Requirements)’ 대신 ‘권고 사항(Recommendation)’ 또는 ‘제안(Suggestion)’으로 분류하였으며, 그림 3은 구성 예시를 보여준다.

• 분류 기준: 가이드라인 조건이 운전자/차량/주행환경에 관련된 것인지에 따라 분류
• Actor: 운전자, ADS
• 가이드라인 ID 부여 방법: 운전자 안전을 위해 고려할 인적 요인 기능에 대한 중요도를 2 단계로 구분하여 권고와 제안으로 번호를 부여하며, 운전자와 관련이 있는 경우 D, 차량과 관련이 있는 경우 V, 환경과 관련이 있는 경우 E를 부여한 후 순차적으로 001부터 번호를 부여한다.
3. 운전자 관점 가이드라인
운전자 상태 및 특성, 운전자에게 제공할 정보, 운전자의 제어권전환, 운전자 교육 등에 필요한 내용에 대한 가이드라인을 표 3과 같이 제안하였다.
표 3 운전자 관점 가이드라인
| 번호 | 가이드라인 내용 |
|---|---|
| HFR_D_001 [27] | 운전자가 자율주행 중에 수행하면 안 되는 NDRT 종류를 선정해서 알려주어야 한다(예, sleep, watch movie 등). |
| HFR_D_002 [10,14,15] | ADS는 자율주행 중에 항상 운전자의 운전준비도를 모니터링하고 있어야 한다. |
| HFR_D_003 [15] | ADS는 운전자의 준비상태를 실시간으로 모니터링하여 임계치 이상 유지할 수 있어야 한다. |
| HFR_D_004 [15] | 운전자가 좌석에 착석하고 있는지 감지할 수 있어야 한다. |
| HFR_D_005 [31] | 운전자의 연령대(청년, 장년, 고령 등)를 고려하여 TOR 정보 제공에 따른 반응시간을 확보할 수 있어야 한다. |
| HFR_D_006 [10,12,14,15] | ADS는 운전자가 제어권전환을 받아 운전을 시작했음을 감지해야 한다. |
| HFS_D_007 [14] | 제어권전환 관련 조작 방법은 운전자가 쉽게 닿을 수 있는 영역 안에 있다. |
| HFS_D_008 [14] | 운전자에게 제공하는 정보는 운전자의 인식 가능한 영역 안에 표시한다. |
| HFS_D_009 [10,14] | ADS는 운전자가 상황을 혼동하지 않고 알 수 있도록 운전자에게 주행상황정보와 경고를 제공한다. |
| HFS_D_010 [9,14] | ADS는 운전자가 정보를 쉽게 인식할 수 있도록 효과적인 HMI 모달리티와 이미지를 사용한다. |
| HFS_D_011 [14] | 사용된 컨트롤 요소는 시각적인 HMI(예, color, symbol) 디자인과 호환되어야 한다. |
| HFS_D_012 [14,15] | 청각으로 알려주는 정보를 사용할 때는 차량의 다른 소리(sound)와 구분되도록 설계되어야 한다. |
| HFS_D_013 [10] | 운전자가 이해할 수 있도록 차량에서 제공하는 제어권전환, TOR에 대한 개념 및 각종 알림에 대해 설명되어야 한다. |
| HFS_D_014 [15] | 제어권전환 TOR 안내 시 운전자가 이를 이해하고 수동운전에 착수하는지 모니터링을 시작하고, 제한된 시간(임계치) 안에 제어권전환을 완료할 수 있도록 알림 방법을 설계한다. |
| HFS_D_015 [12] | 자율주행 차량을 이용하려는 운전자를 위한 제어권 전환 방법을 교육하고 훈련할 수 있는 방법이 준비 되어야 한다. |
4. 차량 관점 가이드라인
차량의 제어권전환 요청, 차량 기능 안내, 차량 정보 외부 알림, 차량 제어/데이터 로깅 등에 필요한 내용에 대한 가이드라인을 표 4와 같이 제안하였다.
표 4 차량 관점 가이드라인
| 번호 | 가이드라인 내용 |
|---|---|
| HFR_V_001 [15] | ADS는 자율주행이 종료되기 전에 운전자에게 제어권전환 요청을 제공해야 한다. |
| HFR_V_002 [6,10,14,15] | ADS는 현재 자동화 수준과 이용 가능한 자동화모드를 표시해야 한다. |
| HFS_V_003 [9,14,15] | ADS는 운전자에게로 제어권전환을 위해 제어권전환 요청을 청각/시각, 청각/촉각, 청각/시각/촉각 등의 방법으로 제공해야 한다. |
| HFS_V_004 [9,30] | ADS는 계획된 TOR의 경우 pre-cue를 제공하여야 한다. |
| HFS_V_005 [9,30] | Pre-cue는 시각/청각적 방법으로 다른 정보와 구별되게 제공하여야 한다. |
| HFS_V_006 [6,14] | 현재 자율주행 중에 자동으로 수행하는 기능, 즉 속도 변경, 경로 변경, 추월 등이 표시되어야 한다. |
| HFS_V_007 [6,14] | 운전자에게 ADS 의 자동화 기능과 한계를 명확히 알려주어 자동화 상태를 지나치게 신뢰하지 않도록 한다. |
| HFS_V_008 [14] | 자동화 기능에 대한 경고를 너무 자주 반복하지 않는다. |
| HFR_V_009 [14,15] | 자율주행 차량의 HMI를 설계할 때 운전자가 의도하지 않은 비활성화(deactivation)를 방지하기 위해 비활성화 요청이 들어오면, 운전자가 요구한 것인지 확인할 수 있어야 한다. |
| HFR_V_010 [14,15] | 자율주행 차량의 HMI를 설계할 때 운전자가 의도하지 않은 활성화(activation)를 방지하기 위해 활성화 요청이 들어오면, 운전자가 요구한 것인지 확인할 수 있어야 한다. |
| HFS_V_011 [32] | 자율주행 차량의 주행 모드를 외부차량과 보행자에 알려줄 수 있어야 한다. |
| HFS_V_012 [32] | 운전자 차량이 제어권전환을 진행 중인지 외부차량과 보행자에 알려줄 수 있어야 한다. |
| HFS_V_013 [10,15] | 운전자의 제어권전환 가능 여부를 판별하고 제어권전환 불가 시, 차량 운행을 정지할 수 있어야 한다. |
| HFS_V_014 [6,32] | 위험 최소화 운행 상태도 외부차량과 보행자에 알려줄 수 있어야 한다. |
| HFS_V_015 [10,15] | ADS는 운전설계영역(자율주행시스템이 정상적으로 작동하기 위해 필요한 주행환경 조건: ODD)을 정하여 운행환경 및 운용방법을 제한할 수 있어야 한다. |
Ⅴ. 결론
본 고에서 ETRI 가 제안한 자율주행 차량 SAE 레벨 2/레벨 3 차량 가이드라인은 미국, 독일, 일본 등의 자율주행차 가이드라인, ISO 국제 표준, 국내 자율주행자동차 기준안, 유럽 AdaptiVe 프로젝트, ETRI 자율주행 제어권전환 인적 요인 특성 실험 결과 등을 참조하여 자율주행차량 제작과 운행에 관계된 기관들이 참고하고 적용해 볼 수 있는 사항에 대해 도출하였다.
향후, 추가적으로 가이드라인에 포함될 내용으로 다음의 사항을 고려할 수 있다.
• 운전자가 더 이상 처리할 수 없는 응급 상황에서는 ADS가 운전자 입력(요청)이 없어도 개입할 수 있도록 ADS의 비상상태 처리를 고려한다[6,14].
• 운전자가 반응하지 않는 상황에 개입하여 사고를 예방할 수 있도록 ADS의 능동적인 안전 기능의 제공이 고려되어야 한다[14].
• ADS는 불확실한 상황, Critical 상황, 자동차 한계/실패 등을 감지하는 경우 “계획되지 않은 TOR”을 운전자에게 제공할 것을 고려해야 한다[9,14].
대한민국 정부에서는 2027년 융합형 레벨 4 자율주행차 상용화 기반 완성을 목표로 자율주행 기술 개발 혁신사업에 대한 예비타당성조사가 통과되어, 2021년부터 2027년까지 총 1조 974억 원 규모의 자율주행차량 초일류 국가 달성을 위한 범부처 협력형 자율주행 기술 개발 프로젝트를 추진할 예정이다[33]. 또한 2020년 5월부터 국토교통부가 제정한 「자율주행자동차 상용화 촉진 및 지원에 관한 법률」(약칭: 자율주행자동차법)과 자율주행 안전구간 지정, 시범운행지구 지정 등에 관한 절차 등을 시행할 수 있는 시행령 및 시행규칙이 제정되어 시행되고 있다[34,35]. 자율주행차량의 상용화를 위한 국가 법령의 제정과 지속적인 기술 개발이 진행되고 있으므로 안전한 자율주행차량 제작과 이용에 대한 가이드라인 연구와 보완 작업도 계속되어야 할 것이다.
용어해설
Driver Readiness 운전 준비도. 자율주행에서 수동운전으로 전환 시 운전자가 운전할 준비가 얼마나 되었는지를 나타내는 지표
Pre-cue 운전자가 미리 준비할 수 있도록 제어권전환이 일어나기 전에 미리 제공하는 정보
NDRT(Non-Driving Related Task) 운전자가 운전이 아닌 다른 태스크를 수행(예, 전화)
NHTSA(National Highway Traffic Safety Administration) 미국 도로교통안전국
NTSB(National Ttransportation Safety Board) 미국 연방교통 안전 위원회
Take Over 제어권전환. 자동주행에서 수동운전으로 자율 주행 차량의 조작권을 전환
UNECE(United Nations Economic Commission for Europe) 유엔 유럽 경제 위원회
약어 정리
ADAG
Automated driving ad hoc group
AdaptiVe
Automated Driving Applications and Technologies for Intelligent Vehicles
ADS
Automated Driving System
ANSI
American National Standards Institute
DOT
Department of Transportation
FRAV
Functional Requirements for Automated/Autonomous Vehicles
GRVA
Working Party on Automated/Autonomous and Connected Vehicles
HMI
Human Machine Interface
ISO
International Organization for Standardization
TOR
Take Over Request
TRB
Transport Research Board
VMAD
Validation Method for Automated Driving
참고문헌
그림 1
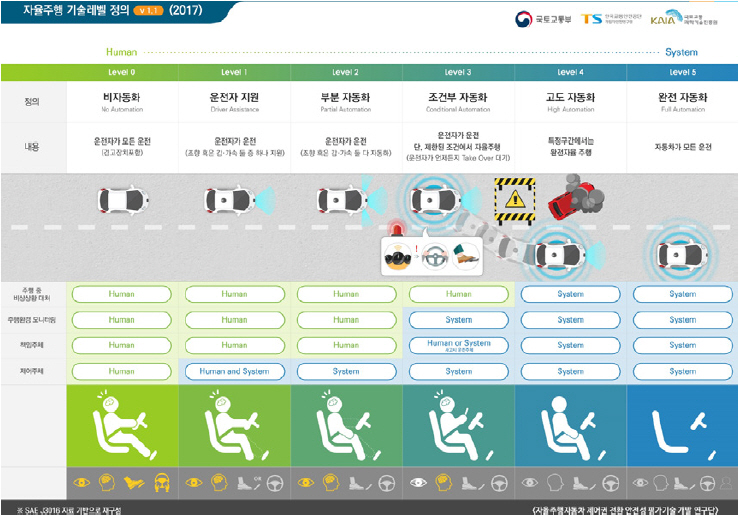
그림 2
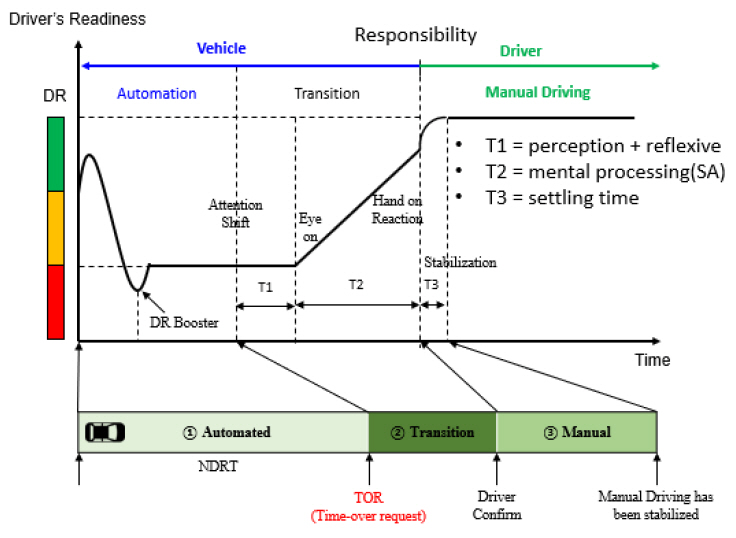
그림 3