반려 로봇
Life Companion Robots
- 저자
-
김재홍인간로봇상호작용연구실 jhkim504@etri.re.kr 서범수지능로봇연구실 bsseo@etri.re.kr 조재일지능로봇연구실 jicho@etri.re.kr 최정단지능로보틱스연구본부 jdchoi@etri.re.kr
- 권호
- 36권 1호 (통권 188)
- 논문구분
- ETRI 기술발전지도 2035: 신개념형상을 중심으로
- 페이지
- 12-21
- 발행일자
- 2021.02.01
- DOI
- 10.22648/ETRI.2021.J.360102
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- This article presents the future vision and core technologies of the “Life Companion Robot,” which is one of the 12 future concepts introduced in the ETRI Technology Roadmap published in November 2020. Assistant robots, care robots, and life support robots were proposed as the development stages of life companion robots. Further, core technologies for each of the ten major roles that must be directly or indirectly performed by life companion robots are introduced. Finally, this article describes in detail three major artificial intelligence technologies for autonomous robots.
Share
Ⅰ. 서론
2019년 11월에 ETRI R&R(Role and Responsibilities)이 확정되었으나 ETRI가 만드는 미래상을 충분히 담아내지 못하고 있어 ETRI R&R을 포괄하는 ETRI가 만드는 2035 미래상을 담은 ‘지능정보사회로 가는 길-ETRI 기술발전지도 2035[1]’를 2020년 6월에 발간하였다.
이 보고서에는 R&R에 정의된 ETRI의 기술적·사회적 역할과 함께 최근 코로나19의 유행을 계기로 예상되는 미래사회의 변화를 고려하여 15년 후인 2035년 미래상을 제시하고 있다. 보고서에서는 총 12개의 미래상을 제시하고 있으며 그중 하나가 복지 측면의 일상생활 편의 개선과 관련된 ‘반려 로봇’이다.
ETRI 기술발전지도 2035의 ‘반려 로봇’은 엔터테인먼트, 교육, 정보 제공, 케어(돌봄) 및 가사지원을 포함한 일상적인 생활지원 서비스를 제공하며, 가정에서 사람과 공존하면서 정서적·물리적 서비스를 제공하는 동반자적 관점에서 대표 용어로 사용되었다.
본 고에서는 보조(Assistant), 돌봄(Care), 생활지원(Life Support) 등을 포괄하는 개념의 ‘반려 로봇’의 미래상과 핵심기술에 대해 소개한다. Ⅱ장에서는 코로나19로 주목받게 된 서비스로봇에 대해 소개하고, Ⅲ장에서는 코로나19 확산에 따른 환경변화 동인과 포스트 코로나 시대에 요구되는 서비스로봇 중 반려 로봇의 요구사항에 대해 살펴본다.
Ⅳ장에서는 2035 미래상과 관련된 휴먼케어 로봇 연구 동향과 소셜로봇 발전 전망에 대해 살펴본다. Ⅴ장에서는 ETRI 기술발전지도 2035에서의 반려 로봇의 개념과 발전 방향, 반려 로봇 미래상 실현을 위해 직·간접적으로 관련된 10대 주요역할별 핵심기술을 소개하고, 관련성이 가장 높은 로봇 자율지능에 대해서는 로봇 소셜 상호작용지능, 로봇 이동지능, 인간-로봇 협업작업지능의 발전 단계와 로드맵을 구체적으로 제시하고, Ⅵ장에서 글을 맺는다.
Ⅱ. 코로나가 앞당긴 서비스로봇 붐
지속 성장해 오던 세계 산업용 로봇 시장은 글로벌 경기침체와 미·중(美·中) 무역분쟁으로 인해 2019년에는 전년보다 설치 대수가 12% 감소하였으며, 2014~2019년 연평균 성장률은 11% 수준이었다. 2020년은 코로나19로 인해 감소폭이 더욱 확대되어 코로나19 이전 수준으로 회복되려면 2023년 정도가 되어야 할 것으로 전망되고 있다[2].
서비스로봇 분야에서는 전문 서비스로봇의 판매 대수가 전년보다 32% 증가하였으며, 개인·가정용 서비스로봇 판매 대수는 40% 증가하였다. 2020년에는 코로나19에도 불구하고 전년보다 각각 38%, 16% 성장할 것으로 예상되며, 특히 2023년까지 두 분야 모두 연평균 31% 고성장이 전망된다[3].
국내·외를 모두 포함하여 코로나19 이후 주목받은 서비스로봇들을 살펴보면 표 1과 같으며 크게 공공장소 방역 및 비대면 서비스 제공, 개인 돌봄 등 3가지 분류로 나눌 수 있다.
표 1 코로나19 이후 주목받은 서비스로봇
공공장소 방역 로봇 분류에서는 방역·소독 작업을 직접 수행하는 로봇, 사람들의 마스크 착용이나 사회적 거리 유지 준수 여부를 확인하고 권고하거나 출입자의 체온을 측정하는 로봇 등이 실제 활용되고 있으며, 의료진의 위험 부담을 감소시키기 위해 검체 채취를 수행하는 로봇의 시작품이 개념 증명 수준에서 개발되었다.
공공장소에서의 비대면 서비스 제공 분류에서는 실내·외에서 각종 물품을 배달하는 배송 로봇, 카페·식당에서 음료 및 간단한 음식을 만들거나 서빙을 담당하는 푸드 로봇, 안내 로봇 등이 주목 받았으며, 개인·가정용 로봇 중에서는 코로나19로 인한 돌봄 인력의 공백을 완화할 수 있는 독거노인 돌봄 로봇이 주목을 받았다.
코로나19 발생 이전에도 장기적으로 산업용 로봇 중심의 시장에서 서비스로봇 중심의 시장으로 전환이 이루어질 것으로 예상되었으나 전망보다는 느린 전환을 보이고 있었다. 그러나 코로나19로 인해 서비스로봇이 우리의 일상생활에서 서비스를 제공하는 것이 더욱 가속화될 전망이다[4-6].
Ⅲ. 포스트 코로나 시대 반려 로봇
앞서 살펴본 로봇들은 돌봄 로봇을 제외하고는 모두 공공장소에서 사용되는 로봇들이며, 특정 기능을 수행하는 것이 주목표이기 때문에 기존에 개발된 제품 또는 일부 기술이 추가된 제품을 빠르게 현장에 투입할 수 있었다.
그러나 공공장소와 달리 특정 개인과 장기간 함께 있으면서 서비스를 제공해야 하는 가정은 상황이 다르기 때문에, 이 장에서는 코로나19 확산에 따른 가정에서의 생활 환경변화 동인과 반려 로봇과 관련된 미래의 주요 변화방향에 대해 살펴본다.
코로나19에 따른 ‘사회적 거리두기’로 자유로운 이동이 제한되고 가족 구성원들이 집에서 생활하는 시간이 늘면서 심리적 고립감 증가 및 돌봄 인력 공백 문제가 발생하고 있다. 맞벌이 가구의 약 절반(49.4%)은 어린이집, 유치원, 초등학교 휴업 기간에 돌봄 공백을 경험하였으며, 60%는 코로나19 이후 자녀의 양육 형태를 바꾸었고, 그 결과 73%가 집에서 아이를 돌본 것으로 조사되었다[7].
고령자의 경우 돌봄 종사자로 인한 감염 우려와 일손 부족 등으로 재가방문 돌봄 서비스에 공백이 발생하였다고 보고되었으며[8], 돌봄 서비스 대상 고령자가 670만 명 이상인 일본의 경우 상당수 노인이 관리를 받지 못한 채 방치되고 있다고 보고되었다[9].
이와 같은 환경변화 동인에 따라 감염 우려 없이 일상생활에서 사람과 교감하며 돌봄 인력의 공백을 완화할 수 있는 인간 공존형 반려 로봇(소셜로봇)이 활성화될 것으로 전망되고 있다.
이와 관련하여 사회복지 영역에서 로봇과 인공지능, 스마트홈과 같은 첨단 과학기술을 적극 활용한 비대면 서비스 양성의 필요성이 강조되었으며[10], 2020년 3월 국제학술지 ‘사이언스 로보틱스’에 발표된 논평에서는 “코로나 팬데믹으로 격리된 사람들의 정서적 안정을 위해 대화를 하고 정보를 제공하는 소셜로봇이 중요해질 것”이라고 전망하였다[11].
앞서 살펴본 바와 같이 현재는 활용 가능한 기술과 제품을 중심으로 공공장소에서의 서비스로봇이 주목받고 있으나 미래에는 가정에서 아동, 성인, 고령자의 일상생활 및 정서적 지원을 해 줄 수 있는 인간과 공존하는 반려 로봇에 대한 요구가 점점 증가할 전망이다.
다만 가족 구성원을 대상으로 생활지원 및 정서적 서비스를 제공하는 개인·가정용 로봇에 요구되는 기술은 현재의 공공장소에서 서비스를 제공하는 로봇에 비해 복잡하고 고도화된 기술이기 때문에 장기적인 관점에서 연구개발이 필요하다.
다음 장에서는 대표적인 관련 동향으로 기존 휴먼케어 로봇 관련 동향 분석[12-13] 및 소셜로봇 기술영향평가보고서 중 전망 관련 부분[14-15]에 대해 살펴본다. 아직 세부 로봇 분류에 대한 명칭이 통일되어 있지 않은 상태이기 때문에 참고 자료에서 사용한 로봇 명칭을 그대로 사용하였다.
Ⅳ. 관련 기술 동향
1. 휴먼케어 로봇 연구 동향
휴먼케어 로봇은 어린이, 일반 성인, 고령자 등 모든 사람을 서비스 대상으로 할 수 있으나 현재까지의 연구가 주로 고령자를 대상으로 하고 있어 휴먼케어 로봇은 고령자케어 로봇과 거의 동일하게 인식되고 있으며, 관련 연구 동향은 다음과 같이 요약될 수 있다.
미국에서는 대학을 중심으로 고령자의 삶의 질 향상을 위한 연구가 대규모로 진행된 바 있으며, EU는 기초 기술 경쟁력을 바탕으로 휴먼케어 로봇에 대한 연구개발을 지속 중인데 중증 환자를 위한 시설 중심의 간병 로봇보다는 가정에서 고령자의 독립적인 생활을 보조하기 위한 기술 위주로 연구를 진행하였다.
일본은 전 세계에서 고령화가 가장 빨리 진행되어 미국이나 EU와 달리 고령자 대상 로봇 개발 초기부터 물리적 지원을 중심으로 하는 간병 로봇을 활용한 사회 문제해결에 집중해 왔으나 최근 다른 국가들과 같이 물리적 지원 이외의 서비스 제공을 목표로 연구를 진행하고 있다.
국내에서는 미국이나 EU와 비슷한 방향으로 연구를 진행해 오다가 2019년부터 물리적 지원(이승, 욕창 예방, 배설, 식사)이 가능한 돌봄 로봇 기술 개발을 진행하고 있다. 물리적 서비스를 주로 제공하는 간병 로봇을 제외하면 고령자케어 로봇은 표 2와 같이 주로 건강관리, 생활 지원, 정서 지원, 인지 지원, 정보·안전 서비스 제공을 목표로 연구를 진행하였다.
표 2 휴먼케어(고령자케어) 로봇 서비스 예시
표 2의 서비스 예시는 2008년에서 2014년까지 실제로 진행된 프로젝트를 분석·요약한 자료이기 때문에 최근에 발전된 기술이나 미래지향적인 서비스 개념이 충분히 반영되지 않았다는 점을 참고하기 바란다.
상기 연구는 요양기관에서의 고령자 지원도 목표에 포함되지만, 가정에서의 독립생활 지원이 주요 목표라는 점을 서비스로봇의 미래상 수립 시 고려하였다.
2. 소셜로봇 발전 전망
국제로봇협회(IFR)는 로봇을 용도에 따라 크게 산업용로봇과 전문/개인 서비스로봇으로 나눈다. 소셜로봇이란 용어는 용도가 아닌 로봇의 특징과 기능에 따른 명칭이기 때문에 전문서비스로봇이나 산업용로봇도 소셜로봇의 특성을 가질 수 있으며, 대표적인 소셜로봇으로는 생활지원/교육/정서지원/케어/엔터테인먼트/안내 로봇 등이 있다.
과학기술정보통신부에서는 새로운 과학기술의 발전이 경제·사회·문화·윤리·환경 등에 미치는 영향을 사전에 평가하고, 그 결과를 정책에 반영하기 위해 한국과학기술기획평가원(KISTEP)을 통해 기술영향평가를 실시하고 있으며, 2019년 그 결과로 “2019년 기술영향평가보고서: 소셜로봇 기술[14]”과 “2019년 기술영향평가보고서: 소셜로봇의 미래[15]”를 발간하였다.
이 보고서에서는 대표적인 소셜로봇들의 현재 활용 현황과 5~10년 후 활용되는 모습을 표 3과 같이 정리하였다. 표 3에서 전망된 소셜로봇의 미래 모습은 다음 장에서 제시하는 ETRI 2035 미래상의 반려 로봇과 연관성을 가진다.
표 3 소셜로봇의 5~10년 후 발전 전망[14,15]
ETRI 2035 미래상에서 대표적인 키워드로 제시된 ‘반려 로봇’은 표 3의 소셜로봇과도 같은 개념으로 보아도 무방하며, 엔터테인먼트, 교육, 정보 제공, 케어(돌봄) 및 가사지원을 포함한 일상적인 생활지원 서비스 기능을 가지고 가정에서 사람과 공존하면서 정서적·물리적 서비스를 제공하는 동반자적 관점에서 대표 용어로 사용되었다.
Ⅴ. 2035 미래상과 핵심기술 전망
1. 반려 로봇 개념과 발전 방향
초고령화 사회로 진입하며 독립생활에 어려움을 겪는 고령자가 증가하고 있고, 육아 문제를 개인의 문제가 아닌 사회의 문제로 인식하는 추세이다. 고령자, 어린이 등 사회적 약자의 돌봄 서비스 전담 인력 필요성은 높아지고 있고, 일상의 다양한 가사노동 및 돌봄 서비스 요구가 확대되고 있다. 특히 Ⅲ장에서 살펴본 바와 같이 코로나19와 같은 상황에서는 이러한 사회문제에 대한 해결책의 마련은 국가 차원에서 검토해야 할 핵심적인 사회적 이슈로 주목받고 있다.
ETRI 기술발전지도 2035에서는 이러한 사회적 이슈와 관련된 미래상으로 ‘반려 로봇’을 ‘가정에서 맞춤형 정보, 돌봄, 생활지원 서비스를 자율적으로 제공하는 로봇’으로 정의하고, 2035년 대표적인 모습을 그림 1과 같이 형상화하였다. 반려 로봇은 궁극적으로 인간친화적인 형상으로 노약자, 어린이 등 가족 구성원에 대한 돌봄과 생활지원 기능을 수행할 것으로 예상된다.

반려 로봇 형상 발전 단계는 표 4와 같은 3단계로 정의하였다[1, p.50]. 1단계(~2025년)에서는 가족 구성원에게 개인화된 보조 서비스 제공, 2단계(~2030년)에서는 자연스러운 소통·교감과 함께 맞춤형 돌봄 서비스 제공, 마지막으로 3단계(~2035년)에서는 로봇이 스스로 지식을 축적하여 가사작업, 고령자 돌봄, 아이 돌봄 등이 가능한 수준으로 발전할 것으로 예상된다. 이들 단계에서 제공하는 서비스나 필요한 기술은 현재도 부분적으로 연구가 진행되고 있으나 표 4는 관련된 기술 및 서비스가 실제 일상생활에서 활용되는 시점을 전망한 것이다.
표 4 반려 로봇 형상 발전 단계
안정적인 돌봄 서비스 제공으로 고령자 독립생활을 지원하고, 이와 동시에 육아문제(교육, 놀이, 지도 등)의 해소를 통해 일·가정 양립사회 실현을 앞당김으로써 사회적 약자에 대한 돌봄 서비스 제공 부족 문제를 해결하는 데 로봇 기술이 기여할 수 있을 것으로 기대된다.
2. 반려 로봇 핵심기술
반려 로봇의 형상을 실현하기 위한 10대 주요역할의 기술 분포 및 핵심기술은 그림 2 및 표 5와 같다. 직접 관련된 기술은 ‘R2. 자율지능’이며, 이 외에도 ‘R1. 복합지능’, ‘R10. 신뢰 인프라’, ‘R8. 초실감 상호작용’, ‘R4. 변혁적 컴퓨팅’, ‘R5. 초연결 입체통신’, ‘R3. 고성능 컴퓨팅’ 기술 등이 2035년 반려 로봇의 형상을 실현하기 위해 간접적으로 필요한 기술들이다.
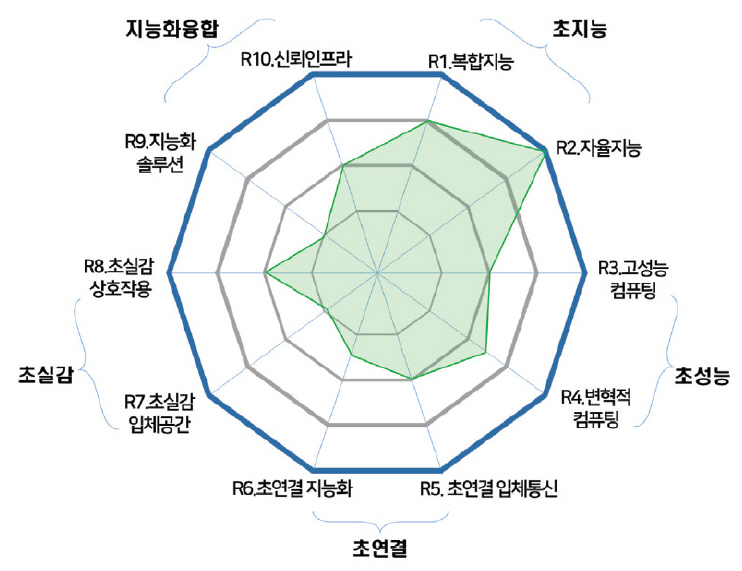
표 5 반려 로봇 핵심기술
이와 같이 2035년 반려 로봇 형상을 실현하기 위해서는 로봇과 직접 관련된 ‘R2. 자율지능’뿐 아니라 초지능, 초연결, 초실감, 지능화융합 모든 분야의 관련 기술들이 함께 발전되어야 한다. 특히 ‘R1. 복합지능’은 가정에서 가족 구성원과 함께 생활하면서 서비스를 제공해야 하는 로봇에게는 필수적인 기술들이며, 고도화된 지능을 처리할 수 있는 ‘R3. 고성능 컴퓨팅’ 및 ‘R4. 변혁적 컴퓨팅’ 기술도 반드시 동반되어야 한다.
3. 로봇 자율지능 핵심기술
상기 핵심기술 중 ‘R2. 자율지능’ 핵심기술은 로봇뿐만 아니라 자율차·드론 핵심기술도 포함하는 개념이다. 본 고에서는 로봇과 직접 관련된 자율지능 세부 핵심기술에 대해 좀 더 상세히 살펴본다.
로봇 자율지능 핵심기술은 로봇 소셜 상호작용지능, 로봇 이동지능, 인간-로봇 협업 작업지능 3가지로 정의하였으며, 일반적으로 로봇의 핵심기술로 분류되는 조작 지능은 본 분류에서는 인간-로봇 협업작업지능에 포함되는 것으로 정의하였다.
가. 로봇 소셜 상호작용지능
로봇 소셜 상호작용지능은 사람의 사회적 상호작용 신호와 단서(Social signals & Cues)들을 이해하고 적절히 반응함으로써 사람과 자연스러운 상호작용을 가능하게 하는 로봇 지능으로 정의할 수 있다.
현재까지는 주로 사람과의 상호작용을 위한 단서에 해당하는 인식 기술(얼굴, 성별, 연령, 표정, 시선방향, 제스처, 행동, 자세, 터치, 표정, 감정 등)의 개발에 집중하고 있는 단계로 볼 수 있다. 상호작용 측면에서는 범용 음성인식 기술을 로봇에 단순 적용하고 있으며, 얼굴/성별 인식 기술 등의 적용을 통한 단순 반응형 개인화 수준으로 자연스러운 대화 및 장기 상호작용 기술 개발은 아직은 초기 단계에 해당한다.
로봇 소셜 상호작용지능의 발전 단계는 기존 자료[16]에서도 8단계로 정의된 바가 있다. ETRI에서는 [1]에서 6단계로 단순화된 발전 단계를 정의하였으며 표 6과 같다.
표 6 로봇 소셜 상호작용지능 발전 단계
현재 기술 발전 단계는 2~3단계에 해당한다고 볼 수 있으며, 경험기반 학습을 통해 로봇 스스로 사용자를 관찰하면서 사용자의 목표/의도를 추론하고, 선호도/습관 등에 대한 지식축적과 사람-사람 관계 이해를 통해 다수의 사용자와도 자연스러운 장기 상호작용을 가능하게 하는 것이 궁극적인 목표이다.
나. 로봇 이동지능
로봇 이동지능은 불완전한 지도나 가보지 않았던 환경, 다양한 비정형 노면의 환경에서도 사람처럼 이동할 수 있는 지능 개발을 목표로 하고 있으며, 특별히 사람과 공존을 위하여 정적·동적 객체와 주변에 대한 이해, 사회적 규범과 통념에 대한 학습을 통한 안전하고 편리한 로봇 이동지능의 지속적 향상을 목표로 한다.
현재 실내 환경 자율주행 기술은 상용화 단계이며, 실외 환경 자율주행 기술은 대학 캠퍼스, 도심 일부 공간 등 제한된 공간에서 초기 상용화 검증 중인 단계이다. 최근 로봇이 주행을 하면서 주행공간 및 이동 객체의 의미 정보를 스스로 구축하는 연구와 더불어, 불완전한 포털 지도 정보를 기반으로 로봇을 목적지까지 가이드하는 로봇이동 인공지능 초기 연구가 시작되었다.
로봇 이동지능 발전단계는 무인화 시스템의 자율화 레벨[17] 11단계에 개념이 포함되어 정의된 바가 있다. ETRI에서는 참고문헌 [1]에서 6단계로 단순화된 발전 단계를 정의하였으며 표 7과 같다.
표 7 로봇 이동지능 발전 단계
현재 기술 발전은 3단계에 해당한다고 볼 수 있으며, 장기적으로는 이동 중 사람 및 환경과의 상호작용 경험을 기반으로 사회적 규범과 통념에 대한 학습을 통해 안전하고 편리한 로봇 이동지능의 지속적 향상을 목표로 한다.
다. 인간-로봇 협업작업지능
인간-로봇 협업작업지능은 사전에 알려지지 않은 물체 핸들링 등 복잡한 작업 수행이 가능한 조작 지능을 기반으로 로봇이 사람의 작업에 실시간 반응하며 안전한 인간-로봇 협업작업 수행을 위해 필요한 로봇 지능으로 정의할 수 있다.
현재 제조/물류 분야의 제한된 환경에서 물체를 핸들링하는 기술이 상용화 단계이며, 사전에 알려지지 않은 물체, 일상 환경에 존재하는 물체에 대한 조작 기술이 연구 단계에 있다. 최근 유럽/일본 기업을 중심으로 협동로봇(레벨 2)이 상용화되어 빠르게 시장을 확대하고 있는 중이다.
인간-로봇 협업작업지능 발전 단계는 기존 자료[18]에서 산업용 및 협동 로봇 관점에서 5단계로 정의된 바가 있다. ETRI에서는 [1]에서 가정과 같은 일상생활 공간을 포함하는 6단계로 발전 단계를 정의하였으며 표 8과 같다.
표 8 인간-로봇 협업작업지능 발전 단계
| 단계 | 핵심 세부 기술 |
|---|---|
| 레벨 0 | 작업공간을 펜스로 분리 |
| 레벨 1 | 작업공간 공유하지 않음, 동시 작업 |
| 레벨 2 | 작업공간 공유, 순차 작업 |
| 레벨 3 | 작업공간 공유, 동시 작업 |
| 레벨 4 | 작업공간 공유, 실시간 반응·협력 |
| 레벨 5 | 일상생활, 실시간 반응·협력 |
현재 기술 발전 단계는 2~3단계에 해당한다고 볼 수 있으며, 장기적으로는 일상생활에서 가족 구성원과 상호작용하면서 사전에 알려지지 않은 물체 핸들링 등 복잡한 작업 수행이 가능한 조작 지능과 실시간 작업 의도/경로 예측을 기반으로 로봇이 사람의 작업에 실시간 반응하며 안전한 인간-로봇 협업작업을 수행하는 것이 궁극적인 목표이다.
라. 로봇 자율지능 핵심기술 로드맵
Ⅴ장 3절에서 정의한 로봇 자율지능 핵심기술은 표 9와 같이 단계별 지능 레벨 실현(1단계/레벨 3, 2단계/레벨 4, 3단계/레벨 5)을 목표로 하고 있다. 표 9의 로드맵은 [1]의 자료에서 수립한 자율지능 핵심기술 로드맵에서 로봇 지능과 관련된 내용을 요약한 것이다.
표 9 로봇 자율지능 핵심기술 로드맵
| 핵심 기술 |
1단계 |
2단계 |
3단계 |
|---|---|---|---|
| 레벨 3 | 레벨 4 | 레벨 5 | |
| 로봇 소셜 상호작용지능 | 로봇행위 개인화 | 사용자에 대한 단기 추론 | 사용자 장기지식 축적, 다자 상호작용 |
| 로봇 이동지능 | 정형환경 자율주행 | 비정형, 처음 보는 환경 | 사회통념과 규범 이해 |
| 인간-로봇 협업작업지능 | 작업공간 공유, 동시작업 | 작업공간 공유, 실시간 반응·협력 | 일상생활, 실시간 반응·협력 |
로봇 소셜 상호작용지능은 1단계에서 사용자 정보모델을 자동 구축하고 로봇 행위를 개인화(레벨 3)하고, 2단계에서 단기관찰 기반 사용자 목표·의도 추론에 따른 반응형·적응형 상호작용(레벨 4)을 실현하며, 3단계에서 관찰을 통한 사용자에 대한 지식 축적을 통해 장기 상호작용(레벨 5)이 가능하게 하는 것을 목표로 한다.
로봇 이동지능은 1단계에서 사람이 결정한 이동정책에 따른 정형 환경에서의 자율이동(레벨 3)을 완성하고, 2단계에서 복잡한 비정형 환경에서의 자율이동(레벨 4)을 실현하며, 3단계에서 사람과의 상호작용 경험까지 반영하여 완전 자율주행(레벨 5)이 가능하게 하는 것을 목표로 한다.
인간-로봇 협업작업지능은 1단계에서 인간과 로봇의 작업공간 공유(레벨 3) 상황에서의 협업을 완성하고, 2단계에서 인간과 로봇의 안전한 협업(레벨 4)을 실현하며, 3단계에서 가정의 일상생활에서도 실시간 반응·협력(레벨 5)이 가능한 기술 실현을 목표로 한다.
Ⅵ. 결론
본 고에서는 일상생활과 관련된 2035년 로봇의 미래상 및 관련 핵심기술에 대해 기술하였다. Ⅴ장 3절에서는 로봇 자율지능 핵심기술의 발전 단계를 정의하고 미래상 실현을 위한 로드맵을 제시하였다.
로봇 자율지능 핵심기술의 실현 방법과 관련하여 현재는 사전에 알려진 제한된 상황에 대한 인간-로봇-환경 상호작용을 위한 로봇 지능(소셜·이동·조작) 단위 기술을 확보하여 고령자케어, 물류, 제조분야 로봇 등에 적용 중인 단계로 개발된 지능이 새로운 환경에 스스로 적응하며 발전하는 형태는 아니다.
향후의 로봇 자율지능은 로봇이 운영되는 환경에서의 이동, 사람과의 상호작용, 물체 조작 및 협업 경험을 인공지능 학습 데이터로 활용하여 로봇이 스스로 새로운 환경, 사람, 물체에 대한 지능을 클라우드와 연계하여 지속 향상시키는 자율학습형 로봇 인공지능 기술로 발전할 것으로 전망한다[19-20].
이와 같이 인공지능, 클라우드와 결합한 로봇 자율지능 핵심기술을 개발하여 일상생활에서의 활용을 통해 고령자 독립생활을 지원하고, 일·가정 양립사회 실현을 앞당김으로써 사회적 약자에 대한 돌봄 서비스 제공 부족 문제를 해결하는 데 로봇 기술이 이바지할 수 있기를 기대한다.
용어해설
소셜로봇(Social Robot) 인지 능력과 사회적 교감 능력을 바탕으로 인간과 상호작용함으로써 사회적 기능을 수행하는 로봇. 사용자 및 환경을 인식하고, 주어진 상황에 따라 적합한 행위를 판단 및 학습하여 사회적 행위를 표현하는 특징을 가짐
약어 정리
Guang-Zhong Yang et al., "Combating COVID-19-The role of robotics in managing public health and infectious diseases," Science Robotics, Vol.5, Issue 40, 2020.
H.-M. Huang and Elena R. Messina, "Autonomy levels for unmanned systems (ALFUS) framework volume II: framework models initial version," No. Special Publication (NIST SP)-1011-II-1.0, 2007, https://www.nist.gov/publications/autonomy-levels-unmanned-systems-alfus-frameworkvolume-ii-framework-models-initial
IFR Positioning Paper, "Demystifying Collaborative Industrial Robots," International Federation of Robotics(IFR), Dec. 2018, p. 2, https://ifr.org/downloads/papers/IFR_Demystifying_Collaborative_Robots.pdf

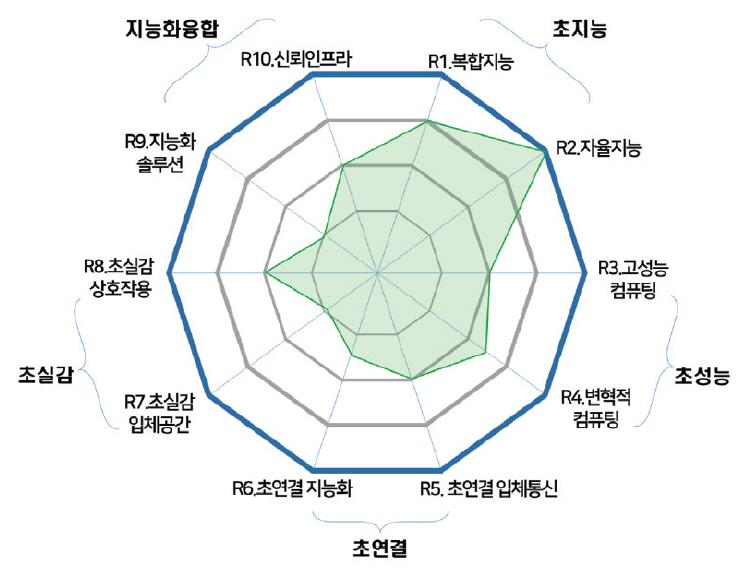
표 1 코로나19 이후 주목받은 서비스로봇
표 2 휴먼케어(고령자케어) 로봇 서비스 예시
출처 고우리 외, “휴먼케어 로봇과 소셜 상호작용 기술 동향고령자케어 서비스 연구동향,” 전자통신동향분석 제35권 제3호, 2020, pp. 34-44, 기반 재작성
표 3 소셜로봇의 5~10년 후 발전 전망[14,15]
출처 조아라 외, “2019년 기술영향평가보고서: 소셜로봇의 미래,” 한국과학기술기획평가원, 2019, pp. 14-15, 기반 재작성
표 4 반려 로봇 형상 발전 단계
출처 한국전자통신연구원, “지능정보사회로 가는 길: 기술발전지도 2035,” 2020. 6, 공공누리 4유형
표 5 반려 로봇 핵심기술
출처 한국전자통신연구원, “지능정보사회로 가는 길: 기술발전지도 2035,” 2020. 6, 기반 재작성
표 6 로봇 소셜 상호작용지능 발전 단계
출처 한국전자통신연구원, “지능정보사회로 가는 길: 기술발전지도 2035,” 2020. 6, 기반 재작성
표 7 로봇 이동지능 발전 단계
출처 한국전자통신연구원, “지능정보사회로 가는 길: 기술발전지도 2035,” 2020. 6, 기반 재작성
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.