사고제로, 커넥티드 자율이동체
Zero Accident, Connected Autonomous Driving Vehicle
- 저자
-
최정단지능로보틱스연구본부 jdchoi@etri.re.kr 민경욱자율주행지능연구실 kwmin92@etri.re.kr 김재홍인간로봇상호작용연구실 jhkim504@etri.re.kr 서범수지능로봇연구실 bsseo@etri.re.kr 김도현지능형위치항법연구실 dohyun@etri.re.kr 유대승지능로보틱스울산연구실 ooseyds@etri.re.kr 조재일지능로봇연구실 jicho@etri.re.kr
- 권호
- 36권 1호 (통권 188)
- 논문구분
- ETRI 기술발전지도 2035: 신개념형상을 중심으로
- 페이지
- 22-31
- 발행일자
- 2021.02.01
- DOI
- 10.22648/ETRI.2021.J.360103
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- In this thesis, we examine the development status of autonomous mobility services using various artificial intelligence algorithms and propose a solution by combining edge and cloud computing to overcome technical difficulties. A fully autonomous vehicle with enhanced safety and ethics can be implemented using the proposed solution. In addition, for the future of 2035, we present a new concept that enables two- and three-dimensional movement via cooperation between ecofriendly, low-noise, and modular fully autonomous vehicles. The zero-error autonomous driving system will safely and conveniently transport people, goods, and services without time and space constraints and contribute to the autonomous mobility services that are free from movement in connection with various mobility.
Share
Ⅰ. 서론
자율이동체는 친환경화와 지능적 이동서비스를 지원하는 미래차의 경쟁력을 견인할 기대주로 부상 중이다. 특히, 자율주행차는 운전자의 노동이 기계와 전자장치로 대체됨으로써 운전자의 인지판단 오류와 실수로 인한 교통사고를 획기적으로 줄이고, 이동하는 시간과 공간의 가치 향상이 가능하다. 최근, 자율주행기술은 COVID-19 팬데믹 상황에서 비대면 서비스에 대한 관심이 고조되면서 무인배송 등 다양한 서비스로 진화 중이다. 자율주행차 등의 수평적 이동로봇뿐만 아니라 UAM 등의 수직적 이동체가 대두되고 있다.
이러한 자율이동체는 기계시스템과 스스로 인지하고 판단 및 제어하는 지능정보 기술이 융합되어 지능화된 서비스 제공이 가능하다. 또한, 지속가능성과 친환경성을 위해 전기동력원을 사용하는 자율이동체 플랫폼 연구가 진행되고 있다. 자율이동체 플랫폼은 이동플랫폼 자체뿐만 아니라 지도와 공공·민간서비스 제공 등 파생 시장으로 경쟁력이 가속화되고 있다. 자율이동체 플랫폼은 단순한 사람이나 재화의 이동을 개선할 뿐만 아니라 서비스 제공을 위해 MaaS와 TaaS 등과 연계되어 신산업·신서비스가 창출 중이다.
본 고에서는 미래 2035년에 자율이동 시대를 준비하는 안전하고 독립적인 자율이동체를 소개하고자 한다. Ⅱ장에서는 자율주행기술의 사고율 제로를 위한 개발현황을 살펴보고, Ⅲ장에서는 미래 2035 신개념 형상물을 소개하고, Ⅳ장에서 결론을 맺고자 한다.
Ⅱ. 자율주행차 기술개발 현황
1. 자율주행차 단계별 기능
자율주행차의 기능 단계를 구분하기 위해 미국자동차공학회는 표준[1]으로 제정하고 개정 및 보완 중이다. 표준에서는 자율주행차의 자동화 항목, 운전 주시의 의무, 시스템 오류대응 등의 행위 주체와 자동화 구간 등에 따라 6단계로 구분하고 있다. 자율주행3단계와 4단계의 차별성은 시스템 오류 시에 대응의 주체가 운전자와 시스템으로 상이하다. 또한 자율주행4단계와 5단계는 서비스 운영 영역이 한정되느냐의 차이로 구분된다. 자율주행차 기술개발 기관들은 본 표준을 기반으로 기술 단계를 경쟁적으로 높이거나 소극적으로 소개하고 있다. 그러나 자율주행3단계 이상의 시스템은 자율주행시스템 오류 시에 현행법상 제조사가 책임을 지도록 규정하고 있어, 오류 대응에 대한 기술개발이 중요하다.
2. 자율주행 핵심기술개발 현황
가. 자율주행AI 학습용 데이터
높은 수준의 자율주행 기능구현을 위해 인공지능(AI) 융합이 필수적으로 요구됨에 따라 다양한 교통상황 데이터의 수집과 공유체계 마련이 관건이다. 최근 범국가 차원으로 데이터 수집·가공·거래·활용 기반을 강화하여 데이터 경제를 가속화하고, 5G 전국망을 통한 전 산업에서 5G와 AI융합을 확산시키는 정책을 추진 중이다. AI융합 분야에는 신종감염병을 예측하는 의료 분야와 범죄 예방 등의 안전, 그리고 지역이나 산업 고도화 분야 등이 포함된다. 자율주행 데이터 수집도 일부 포함되어 있으며, 주행환경인식을 위한 딥러닝 알고리즘 개발에 활용될 것으로 기대된다.
자율주행 분야에서는 이미지에서 객체를 검출하기 위해 데이터 레이블링 작업이 요구되며, 2차원의 사각형 또는 3차원의 정육면체를 사용하거나, 픽셀별로 의미를 분류하는 시멘틱 세그멘테이션 방법이 있다. 최근에는 딥러닝 기법 중 FCN[2]을 이용하여 차량, 보행자, 도로, 건물, 신호등, 교통표지판 등의 객체들을 보다 정확하게 의미와 위치를 검출한다. 다임러에서는 영상을 픽셀 단위로 레이블링 작업한 차량용 시멘틱 세그멘테이션 데이터셋인 Cityscapes[3]를 공개하였다. Cityscapes 데이터셋은 50개 도시에 대해 계절과 날씨별로 데이터를 구축하였고, 차량의 오도메트리와 위치값을 속성정보로 포함하고 있다. 국내 본 연구팀에서는 개인정보비식별화 처리를 완료한 7종, 1,400만 장의 학습용 데이터셋을 공개하고 있다. 공개데이터에는 시멘틱 세그멘테이션 데이터 2.33GB, 3D 이동객체 21.6GB 등을 포함하고 있다.
나. 자율주행 인지판단제어 SW
자율주행시스템은 인지판단제어 SW 모듈로 구성되며, 인지 단계에서는 다양한 센서 정보로부터 교통 객체의 위치와 속도 등의 정보를 분석한다. 판단 단계에서는 차량의 행동에 대한 정지 또는 회피 등의 임무를 결정하고, 임무에 적절한 종 방향의 속도 값과 횡 방향의 각도 값 등을 산출한다. 산출된 값은 차량의 제어기로 전달되고 현재 차량의 자세와 비교하여 실제적인 차량의 움직임이 발생된다.
그림 1[4]은 딥러닝 기반 6D 이동객체를 검출 및 추적하여 장애물과의 상대위치(3D)를 인식한 결과이다.
최근 딥러닝 기술의 발전으로 자동차전용도로에서의 차선 유지나 차량 간 거리 유지 등의 규칙 기반 자율주행 기능에서 도심 도로에서 앞차와의 자동거리 조절, 신호등인지, 자동 차선변경 등의 복합적 기능수행 등 고도화가 가능하다. 그러나 센서 특성에 따른 인지 한계로 인해 야간이나 눈·비 날씨, 정밀맵이 없는 도로에서의 인지 정확성과 신뢰성 향상이 필수적으로 요구된다. 다양한 환경조건에서도 신뢰성 있는 환경 인지를 위해 카메라 센서와 레이더(Radar) 및 라이다(Lidar) 센서의 융합, 눈비와 미세먼지에 강인한 라이다(Lidar) 센서의 연구도 진행 중이다.

그림 2[4]는 시멘틱 세그멘테이션 기술을 활용하여 주행환경의 인지 대상인 차선속성, 주행방향, 주행차로, 제한속도 등 주행콘텐츠를 12종으로 구분한 결과이다. 주행차로를 예측하거나, 타 차량에 의해 가려진 상황에 강인한 인식 기능 결과를 확인하였다.

정밀맵을 기반으로 하는 자율주행의 판단 모듈은 목적지에 대한 전체 경로가 수립된 후, 인지 모듈에서 분석된 장애물 정보를 정밀맵상에 매핑하여 위험도가 가장 낮은 로컬 경로를 선택하고 추종한다. 그러나 교차로 등과 같이 정밀맵이 부분적으로 없는 경우에는, 네비게이션맵을 이용하여 주행이 가능한 공간을 파악하고 인공신경망을 통해 전방 영상으로부터 주행 가이던스에 부합하는 다수의 지역 경로 중에서 후보를 생성한다. 파티클 필터를 이용하여 예측과 보정단계를 거친 후 대표 추종선을 추출하고 지역경로를 생성하는 과정을 거친다. 그림 3[4]은 라바콘을 이용한 접근 금지 도로 상황에서 주행 가능한 영역을 인지하고 다수의 지역경로를 생성한 후 주행 불가능 영역을 고려한 지역경로를 배제하고 대표 경로를 추출한 결과화면의 예이다.

다. 자율주행AI 시스템
AI 알고리즘이 융합된 자율주행시스템은 GPU 종속성과 함께 차량 컴퓨팅 플랫폼의 높은 전력소모 및 발열 해소가 현안이다. 이를 해결하기 위해 AI최적화 및 경량화 알고리즘 연구와 차량용 AI반도체를 활용한 저전력, 저발열 시스템 연구가 진행 중이다.
미국 테슬라는 최근 완전자율주행시스템의 베타버전으로 FSD[5] 시스템을 배포하였다. 테슬라 자율주행기술의 특징은 기술개발이 완벽하지 않더라도 현실 세계의 사용자 데이터에서 엣지 케이스를 수집하고 학습을 통해 오류를 해결하는 연구 방식이다. 차량의 센서들로부터 수집된 주행데이터는 서버로 전달되며, 서버에서는 보고된 오류 정보들을 분석하고 학습하여 자율주행지능을 향상시킨다. 학습된 지능모듈은 온라인으로 차량시스템의 베타 업데이트가 진행되어 점점 지능이 고도화된다. 현재 베타버전에서 보고된 기술적 한계의 대부분은 현실 세계 데이터 부족으로 발생되는 현상으로, 바닥면이 편평한 곳에서는 잘 작동되는 주차보조시스템이 언덕이나 굴곡진 도로에서의 오류, 또는 신호등 인식의 오류, 그리고 램프 진·출입에서 분기 도로 검색 시 실패하는 등이다.
그러나 테슬라 자율주행시스템의 가장 큰 장점은 현실 세계 데이터의 손쉬운 구축과 학습 엔진의 온라인 업데이트이다. 테슬라 자동차는 상용화된 차량의 운행과 동시에 축적되는 주행상황데이터를 이용하여 지속적인 학습으로 성능을 고도화 할 수 있으며, 추론 엔진은 온라인 방식으로 차량에 갱신됨으로써 완전자율주행 기술은 보다 안전하게 성장할 것으로 기대된다.
라. 안전성과 윤리성 강화
자율주행 기술의 상용화 걸림돌은 부분 자율주행 전체 단계(2~3단계)에서 오류로 인한 교통사고에 대한 불안감이다. 반복적인 사고를 예방하기 위해서는 사고데이터에 대한 분석이 필수적으로 요구되나, 동일한 시나리오에 대한 사고데이터 획득이 어렵고 시뮬레이션만으로는 오류 대응을 위한 체계적인 검증에 한계가 있다.
자율주행AI의 안전성 강화를 위해서는 서비스 운용지역에 대한 대규모 주행데이터를 기반으로 학습과 실제 교통환경에 대한 내재화가 필요하다. 부분적인 모듈의 결합 형태 또는 국내 도로환경이나 운전자와의 수용성이 기반되지 않은 자율주행 기술은 안전성 자체에 위협이 될 수 있다. 이러한 문제점 해결을 위해 국산 기술력을 확보하여 교통문화와 사회적 관념을 이해하는 지능화가 필수적으로 요구된다. 국가·지역별 공통으로 적용될 수 있는 기술과 상이한 특성을 반영해야 하는 기술을 구분하여 체계적이고, 서비스 목적형 기술검증으로 안전성 확보 및 신뢰성 확보가 시급하다.
최근에는 안전성뿐만 아니라 자율주행AI 데이터 및 알고리즘에 내재된 윤리적인 문제에도 관심이 고조되고 있다. 알려지지 않은 이상 징후를 예측 탐지하는 연구와 실시간 비정상적인 상황에 대응하고 사고분석이 가능한 기술 등 다양한 안전과 윤리에 강인한 연구가 필요한 시점이다.
제안된 구조는 저전력 고성능의 오류삽입 검증이 가능한 AI 반도체와 사고분석이 가능한 자율주행SW플랫폼, 그리고 엣지와 클라우드 시스템의 연계 및 시뮬레이션으로 구성된다(그림 4). 다양한 사고 등의 동일한 조건을 반복 시뮬레이션을 수행하여 내재된 알고리즘의 오류와 의도적 공격에도 강인한 알고리즘을 개발하고, 체계적인 자율이동체 AI 개발 윤리 가이드라인을 제시하고 안전에 관한 표준 인증체계 마련이 시급하다.

마. 초고속 초저지연의 V2X
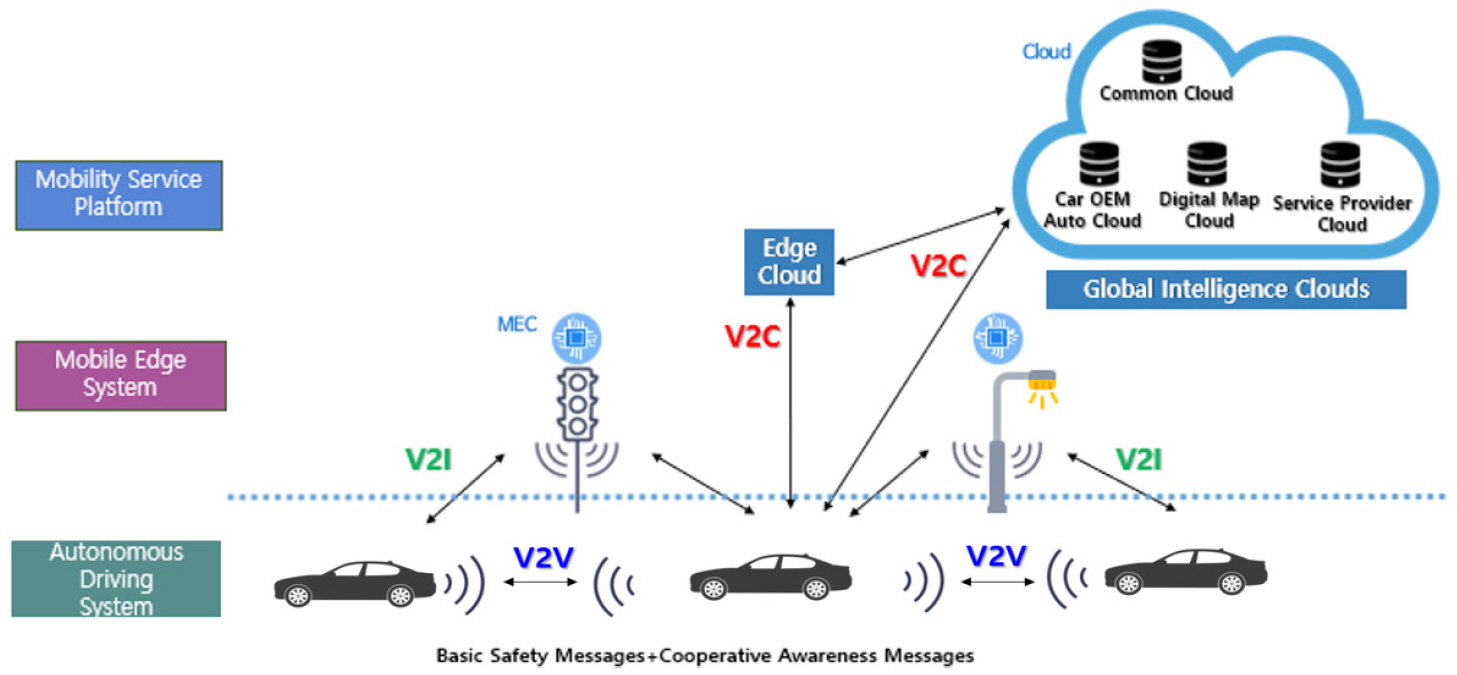
안전한 자율이동체 시스템 구현을 위해서는 이동플랫폼 자체의 인지기능 고도화와 함께 교통신호등이나 랜드마크 건물 등의 인프라와 클라우드 컴퓨팅 자원을 연계하여 협업적 인지를 수행한다. 차량의 센서는 인프라에 장착된 엣지 컴퓨터와 V2I 통신을 이용하여 협업적 인지가 가능하다. 뿐만 아니라 클라우드 컴퓨팅의 풍부한 자원을 활용하여 통합적 사고가 가능한 AI를 지속적으로 개발하고, 추론엔진은 차량으로 온라인 갱신이 가능하다. 그림 5는 차량-엣지-클라우드 협업구조의 서비스 개념도이다.
그림 5
차량-엣지-클라우드 협업형 자율주행시스템 개념도
출처 https://www.iconfinder.com/icons/285810/auto_vehicle_sedan_car_automobile_icon, 기반 재작성
도심 또는 자동차 전용도로 등의 교통환경에 따라 와이파이 방식의 WAVE와 기지국 방식의 C-V2X 등 적합한 통신방식의 표준 제정을 위해 논의가 진행되고 있다. 실도로에서의 통신 성능 테스트를 거친 이후에 상용화와 인프라 전개 확장이 필요하다. 자율주행이동체의 저지연·고속·무결성의 통신 및 보안기술의 성능 요구사항은 표 1과 같다. 10ms 이내의 지연시간과 차량 간 50Mbps 이상, 차량과 인프라 간 Gbps급의 통신속도, 와이파이 대비 90% 패킷전송 신뢰도 대비 99% 이상의 신뢰도 확보가 가능한 V2X 통신기술이 필요하다. 뿐만 아니라 데이터 전달 및 차내망 불법침입에 대응하는 사이버 보안 및 물리 보안 통신기술도 필요하다[6].
3. 자율주행 모빌리티서비스
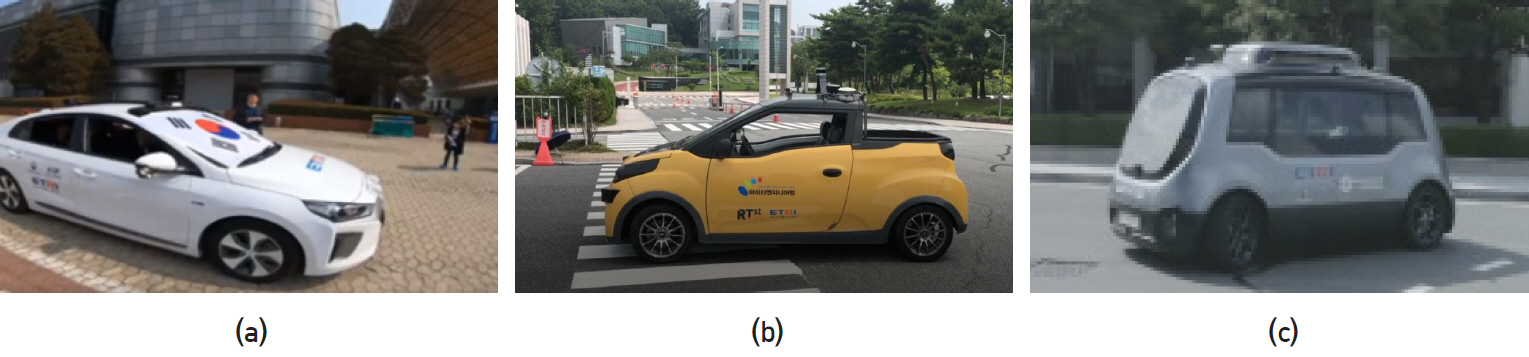
자율주행기술은 이동서비스를 지원하는 분야로 확대됨에 따라 다양한 전기동력원의 이동 플랫폼을 기반으로 모빌리티서비스가 테스트 중이다. ETRI는 전기동력원 차량 플랫폼을 이용하여 2017년 자율주행임시운행허가 획득하였다(그림 6(a)). 동일한 SW플랫폼을 국내 중소기업에서 제작하고 생산하는 저속 전기차에 탑재하여 로봇택시서비스 기술검증을 진행하였다. 음성명령으로 차량을 호출하고, 지정된 위치에 도착, 목적지까지 자율주행한 후, 목적지에서 탑승자는 하차하는 전 과정을 테스트하였다(그림 6(b)). 자율주행4단계인 셔틀 플랫폼을 이용해서 라스트마일 서비스 테스트 결과(그림 6(c))이다. 셔틀서비스는 지정된 노선을 요구 또는 주기적으로 운행하는 교통서비스이며, 대중교통 취약지역, 또는 대중교통과 연계한 근거리 모빌리티서비스로 유용할 것으로 기대된다.

이러한 자율주행4단계 셔틀 플랫폼은 미래 모빌리티의 형태로서 다양한 전기전자 장치를 추가하여 편의 서비스가 가능하다. 대형 디스플레이를 이용하여 고화질 콘텐츠를 제공하거나, 8K 영상 콘텐츠를 실시간으로 스트리밍함으로써 실감형 영화관 등 캐빈 활용도가 높아지고, 이동시간을 더욱 더 가치 있게 활용할 수 있어 미래 이동성 서비스 플랫폼으로 주목받고 있다(그림 7).

III. 2035자율이동체 전망
1. 커넥티드 자율이동체 형상물
ETRI는 2035년 미래 사회에 실현될 미래상으로 부터 신개념 형상물인 커넥티드 자율이동체의 개념을 도출하고 장기적 연구개발의 방향과 목표를 설정하였다.
‘이동의 자유’라는 미래상으로 제시하는 커넥티드 자율이동체는 유인과 무인의 운전자가 혼재된 교통상황에서 이동객체의 의도와 상황을 스스로 인지하고 행동하는 지능을 부여한 시스템이다. 그림 8[7]에서는 발전 방향별로 주요 기술들을 나열하였다. 총 3단계로 구분되며, 가장 가까운 2025년에는 차량단독인지 및 판단 기술로 자율주행3단계를 완벽하게 구현하는 것을 목표로 한다. 2030년에는 자율차와 자율차, 자율차와 클라우드와 엣지 등의 인프라 간에 연결을 통해 인지 범위의 확장 및 주행협상이 가능한 자율주행4단계 구현이 목표이다. 3단계 2035년에는 초연결 고신뢰 초저지연의 통신기술을 기반으로 원격관제 등의 통제 및 관리를 통해 스스로 목적지까지 무정차 운행할 뿐만 아니라 악천후 상황도 센서융합을 통해 인지가 가능한 커넥티드 완전자율이동체로 발전시키고자 한다.

주요기술에는 공간과 시간, 환경 및 상황에 따른 제한사항이 없는 인지판단제어 기술 구현을 포함한다. 뿐만 아니라 시스템의 결함이나, SW의 오류 및 의도적인 공격에도 강인한 안전한 시스템을 위한 이중화와 시뮬레이션을 통한 강인성 테스트를 포함하고 있다.
2035년 미래의 인구와 사회구조의 변화에 선제적으로 대응하여 국가적인 현안 해결에 기여할 것으로 기대한다.
2. 서비스맞춤형 완전자율이동체
자율주행 기술은 미래의 초고령화 사회와 인구 급감 추세에 따른 이동 지원과 도심 양극화로 인한 일자리로의 접근성을 지원하는 등 MaaS 연계의 수송과 물류 배송의 서비스 맞춤형으로 발전될 전망이다. 이로 인해 완전자율이동체의 형태 변화와 상용화를 위한 법제도 변화가 필수적으로 요구된다.
완전자율주행기술이 탑재된 자율이동체는 서비스 목적 맞춤형으로 다품종 소량 생산의 다양한 형태가 기대된다. 승용이나 트럭을 이용한 자율이동형 수송/물류서비스에서 진화된 형태로 무인 배송을 위한 로봇 형태의 자율이동체 등이 다양해질 전망이다.
뿐만 아니라 규제개선제도에서는 기존의 자동차관리법에서 운전과 탑승자의 안전을 위해 좌석 벨트와 윈도우 브러시의 필수 장착 등의 조건이 완화되어 상용화 가능한 수준으로 변화를 준비하고 있다. 규제특례를 활용한 민간주도의 3대 서비스 시범운행도 준비 중이다. 자율주행셔틀(세종, 대구 등, ’22~), 자율주행택시(’21~), 화물차 군집주행 상용화(’21~) 등이다.
3. 완전자율이동체 협업형 서비스
커넥티드 자율이동체 분야에는 전 세계적으로 전기동력의 수직 이착륙이 가능한 무인항공기(eVTOL), 해상 위그선 등 다양한 이동체의 안전 고도화가 진행 중이다. 미래 2035년에는 다양한 자율이동체들 간의 협업을 통해 육해공(陸海空) 영역의 이동공백 없는 끊김 없이 이동서비스의 진화가 전망된다. 최근 한국형 도심항공교통(K-UAM) 로드맵[8]에서는 2024년까지 K-UAM 그랜드 챌린지를 통해 안전하고 편리한 교통서비스를 단계적으로 실현하고 2025년 상용서비스 개시를 목표함을 밝힌 바 있다. 이는 친환경 저소음의 3차원 교통소단으로 2차원의 자율주행차와 협력을 통해 새로운 시간과 공간의 패러다임을 창출할 것으로 기대된다.
개별적인 완전자율이동체의 안전 확보를 기반으로 도심항공터미널이나 충전시설 확충 등의 도시 인프라 개선도 요구된다. 이러한 선도적이며 도전적인 기술발전에는 안전성 검증이 우선시 되어야 하며, 기존 산업과의 마찰도 예견된다. 대중의 수용성을 확보하기 위해 우선적으로 지자체의 적자 재정을 대체하거나, 도서·산간 등 상대적으로 대중교통이나 운송서비스의 사업성이 낮은 분야에서부터 실행되어야 한다.
전 세계적으로 안전기반을 다지기 위한 정부주도의 보험 표준모델을 개발 중이며, 선도적인 운송 사업자에게도 서비스 안전관리 이행점검을 철저히 수행하여 경쟁력 있는 산업생태계가 조성되어야 한다.
4. 친환경 자율이동체
2021년부터는 우리나라도 온실가스 감축 의무를 수행하는 파리협정 대상국이다. 2100년까지 지구의 평균 기온 상승 폭을 산업혁명 이전보다 1.5℃ 이하로 제한하는 노력에 동참해야 한다. 2020년 12월에 발표한 2050년 탄소중립선언[9]에서 디지털 혁신과 결합한 그린 뉴딜로 녹색산업을 발전하여 ‘2017년 배출량 대비 24.4%’ 감축 목표를 제시하고 있다. 상용차 부문에서 급가·감속을 방지하여 에너지 감소를 위해 자율주행군집주행기술에 주목하고 있는 이유이다. 자율주행군집주행기술의 경우 선두차량은 최대 5%, 뒤차는 최대 15%의 에너지 소모를 줄일 수 있고 안정성을 강화하는 연구1)가 진행 중이다. 또한, 2030년 미래자동차 산업발전전략[10]에서도 자동차 산업 대변혁은 친환경화(전기차, 수소차), 지능화(자율주행차), 서비스화(공유차)를 통한 경쟁력 강화를 발표했다. 향후에는 더욱 친환경 동력원을 이용한 자율주행차의 공유서비스가 확대될 전망이다. 미래차 서비스의 공공 수요를 창출하기 위해 교통약자 이동지원, 수요 대응형 대중교통-공유차 서비스, 도시환경 관리, 자율주행 무인 순찰 등 9대 공공서비스 추진을 발표하였다.
Ⅳ. 결론
커넥티드 자율이동서비스는 친환경·저소음·모듈형 자율이동 플랫폼을 기반으로 시간과 공간에 제약 없이 사람과 재화, 서비스를 안전하고 편리하게 이동하는 것이 목표이다. 또한 커넥티드 자율이동서비스는 3차원의 자율비행체 등 다양한 모빌리티와 연계하여 이동의 공백 없는 미래교통의 신개념 형상물이다.
그러나 지속가능한 전기동력원의 안전한 자율이동체 기술에는 해결해야 할 난제들이 존재한다. 안전중시를 위해 시스템을 이중화하거나, AI융합 증가로 GPU 사용이 증가되고, 공간 활용성을 높이기 위해 전자장치의 도입 등은 전력 소모를 더욱 가중할 우려가 있다. 또한, 여전히 기술기업과 서비스 기업 간의 자율주행기술에 대한 안전과 신뢰성에 관한 견해 차이가 존재하여 협업이 지연되고 있다.
기술 경쟁력은 실도로 서비스에서 불편한 테스트를 통해 찾은 오류를 해결하려는 노력으로부터 비롯된다. 사고로 직결될 수 있는 실도로 테스트를 확대하기 위해서는 도전적인 연구가 가능하도록 실패를 용인하는 연구제도와 시범운영지역 확대, 보험과 규제개선 등의 인프라 개선도 함께 진행되기를 기대한다.
약어 정리
eVTOL
electric Vertical Take Off & Landing
FCN
Fully Convolutional Network
GPU
Graphics Processing Unit
Lidar
Light Detection And Ranging
MaaS
Mobility as a Service
Radar
Radio Detection And Ranging
SS
Semantic Segmentation
TaaS
Transportation as a Service
UAM
Urban Air Mobility
V2X
Vehicle to everything
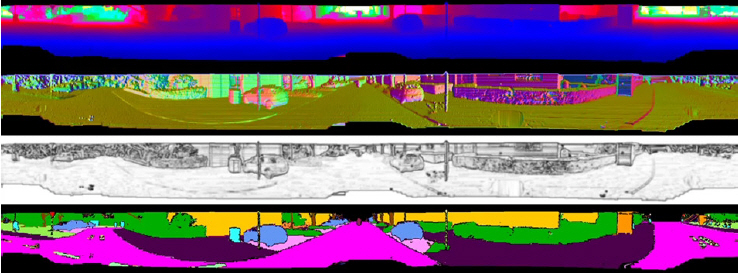

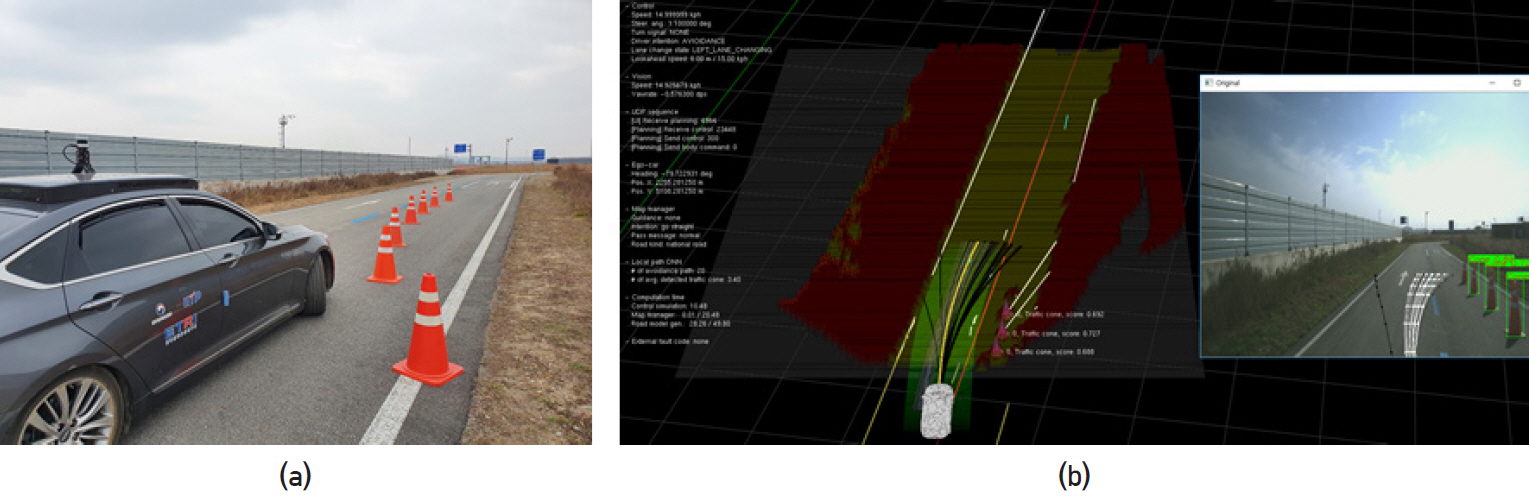
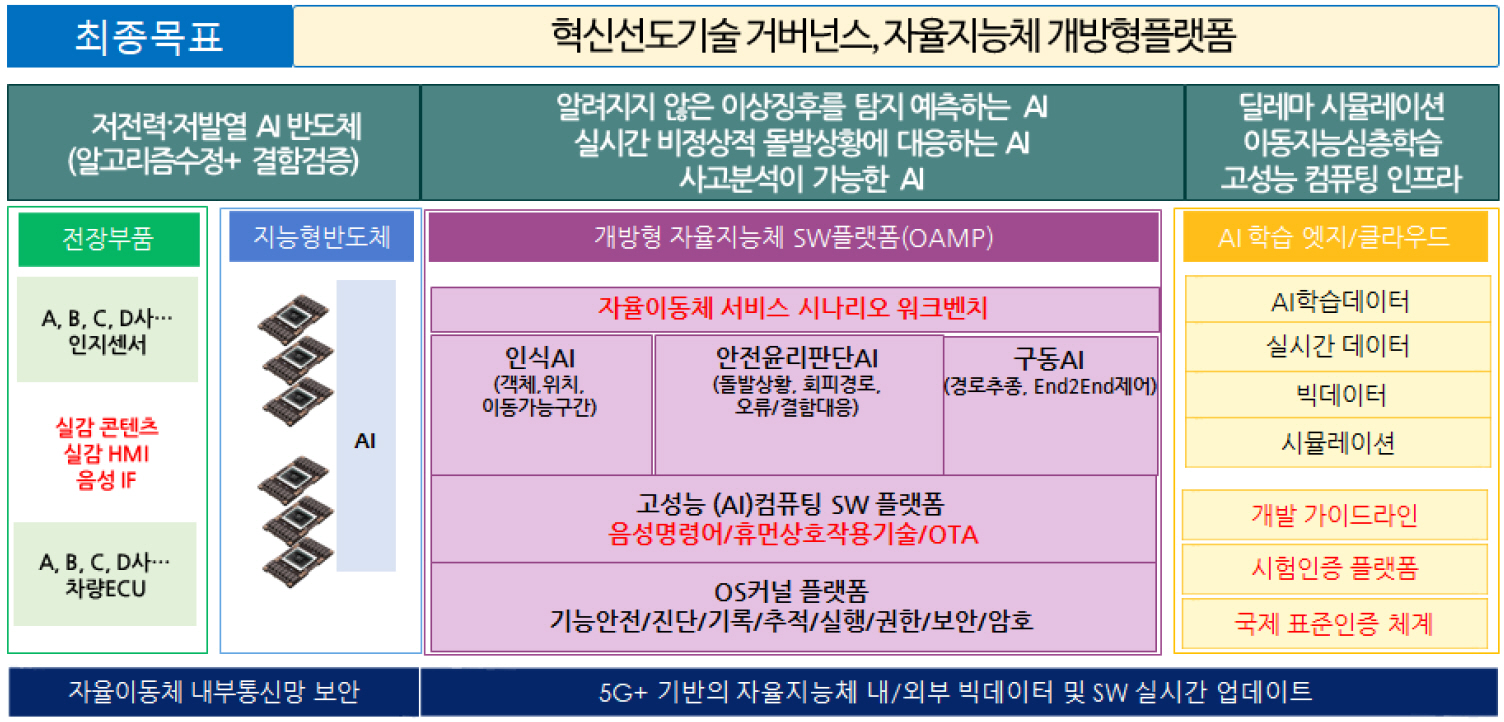
그림 5
차량-엣지-클라우드 협업형 자율주행시스템 개념도
출처 https://www.iconfinder.com/icons/285810/auto_vehicle_sedan_car_automobile_icon, 기반 재작성



- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.