지능형 레이더 기술 동향
Trends in Intelligent Radar Technology
- 저자
-
구본태초경량지능형반도체연구실 koobt@etri.re.kr 박필재초경량지능형반도체연구실 pjpark@etri.re.kr 한선호초경량지능형반도체연구실 shhan@etri.re.kr
- 권호
- 36권 2호 (통권 189)
- 논문구분
- 일반논문
- 페이지
- 12-21
- 발행일자
- 2021.04.02
- DOI
- 10.22648/ETRI.2021.J.360202
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- Intelligent radar sensors are applied in many industries, such as the automobile, aerospace, and defense industries (for security and surveillance), and for traffic monitoring and management as well as environmental and weather monitoring. Furthermore, they are used in smart cities, homes, and buildings, wherein intelligent motion sensing is required in daily life. It is mentioned that it is being used. In addition, ETRI introduces a phased array-based intelligent radar for drone detection and a human name detection radar technology based on which humans can be detected in case of a disaster.
Share
Ⅰ. 서론
방위산업과 일부 영역에 치중된 레이더(Radar) 시장이 지난 10년간 오토모티브와 컨슈머 시장을 중심으로 급격히 바뀌면서 첨단운전자보조시스템(ADAS: Advanced Driver Assistance Systems)을 비롯한 자율주행에 대한 시도가 차량용 레이더의 수요를 증가시켰고, 일상생활에 사용되는 지능형 레이 더 모션센싱 기술이 스마트시티, 홈과 건물에서 각광을 받고 있다. 또한, 드론산업의 발전과 더불어 Anti-드론 시스템과 최근에 플라잉카의 자율비행에 이르기까지 다양한 지능형 레이더 기술개발이 요구된다.
이에 발맞추어 과학기술정보통신부는 전파분야 우수역량을 키우기 위해 전파연구센터(Radio Research Center)를 2019년 5월 4개 대학을 지정하여 다양화되고 있는 전파응용시스템을 효율적으로 설계하기 위한 전파해석 소프트웨어(SW) 개발, 자율주행 센서·실내 내비게이션·재난구조·시설물 보안 등 차세대 서비스를 가능하게 하는 지능형 레이더(RADAR) 기술개발을 주제로 전파연구센터를 선정하였으며, 다음과 같은 연구개발을 추진하고 있다[1]. 차세대 전파응용시스템의 성능분석과 설계를 위한 전파 및 시스템 통합 해석(안테나 특성, 인체 전자파 영향, 실내·외 전파반사, 시스템 성능 분석 등)을 지원하는 시뮬레이션 SW 개발 및 새로운 전파응용 제품 개발 시 손쉽게 활용할 수 있는 플랫폼 구축을 핵심목표로 하며, 또한 물체 인식이 가능한 정밀 영상 레이더와 통신 기능을 동시에 수행할 수 있는 융합시스템 개발을 통해 기존 통신만으로는 할 수 없었던 상황 인식과 센싱 정보 활용 통신(예: V2X) 및 협동 레이더에도 초점을 두고 있다. 여러 개의 군집 드론에 레이더 송수신기를 활용하여 고품질의 SAR 영상을 획득하고, 사회간접 자본/산림/농작물 모니터링, 재난감시 등 다양한 사회문제 해결 등에 활용될 수 있도록 하며, 기존 레이더 센서가 제공하지 않았던 3차원 빔포밍이나 가변레이더를 반도체 칩으로 구현하여 스마트 시티, 홈, 건물 등 다양한 환경에 적용 가능한 지능형 레이더 시스템 개발을 추진하고 있다.
본 고에서는 각광받고 있는 다양한 지능형 레이더 기술 동향을 소개하고자 한다.
1. 자율주행을 위한 차량 레이더 기술
자동차 자율 주행기술의 단계는 국제자동차기술자협회(SAE International)에서 표준 J3016에 따라 크게 6단계로 구분하고 있고, 현재 상용화되어 있는 기술은 Level 2~3 정도라고 볼 수 있다. 다음과 같이 자동차의 자율주행기술 6단계를 요약하여 나타냈다[2].
-
• Level 0(No Driving Automation): 운전자가 직접 차량 제어
-
• Level 1(Driver Assistance): 차량 스스로 조향 및 가감속 제어 보조 기능
-
• Level 2(Partial Driving Automation): 특정주행에서 2가지 이상의 자동화 기능 보유
-
• Level 3(Conditional Automation): 일정 환경에서 자율 주행 가능하나 필요시 운전자 개입
-
• Level 4(High Automation): 일정 환경에서 자율주행 가능, 운전자 개입 불필요
-
• Level 5(Conditional Automation): 모든 주행 상황에서 운전자 개입 불필요
완전자율주행차 시장을 선점하기 위한 자동차 제조사와 기술회사들 간의 합종연횡이 활발하게 진행되고 있으며, 자율주행자동차 구성에서 차량 센서 중 4가지 주요 센서인 가시광선 카메라, 레이저 거리측정 센서(LiDAR), 초음파 센서, 전파 거리측정 센서(Radar)가 가장 중요한 역할을 한다. 전파 거리측정 센서는 차량 주변의 보행자, 다른 차량, 가드레일 등의 속도와 방향을 추적뿐만 아니라 원거리에 있는 물체 및 장애물을 탐지하기 위하여 밀리미터파 전파 주파수를 사용한다[3]. 레이더는 차량의 전방과 측·후방에 상대 차량과 장애물의 위치 정보를 운전자에게 제공하며, 자율주행자동차에 있어서 차량을 제어하고 운전자가 안전하게 주행할 수 있도록 돕는 역할을 수행한다. 차량용 레이더는 야간이나 악천후 상황, 200m 이상의 장거리 사용의 장점이 있으며, Level 5 차량에는 최소 32개 이상의 많은 센서가 필요할 것으로 예상되는데, 라이다 센서는 차량에 1~2개 정도 도입될 반면, 안개가 끼는 상황에서 데이터 수집, 수분과 산소 농도가 물체 감지 능력에 미치는 영향 그리고 역광 문제에 대체할 레이더 센서가 각광을 받을 것으로 예측할 수 있다. 현재 차량용 레이더는 다음과 같은 응용에 적용된다[4].
-
• 적응형 순항제어(ACC: Advanced Cruise Control) 시스템
-
• 전방충돌경고/전방충돌방지보조(FCW: Forward Collision Warning/FCA: Forward Collision-Avoidance Assist) 시스템
-
• 사각지대 탐지(BSD: Blind Spot Detection) 시스템
-
• 차선변경 보조(LCA: Lange Change Assistant) 시스템
자동차시장에서 밀리미터파(mmWave) 차량용 레이더가 장착하기 시작했고, 낮은 비용에 성능이 뛰어난 레이더가 개발되어 차량의 ADAS 시스템에 레이더를 탑재했다. 미국과 유럽 등 대부분 지역에서는 레이더를 이용한 운전자 보조·능동안전 장치 탑재가 법제화되고 있다.
차량용 레이더 센서 시장은 칩 메이커, 모듈 메이커, 시스템 메이커 등으로 구분된다. 레이더 칩은 안테나와 송수신기를 통한 센싱 기능, 레이더 모듈은 레이더 칩을 통해서 센싱한 신호를 거리, 속도, 각도 등 파라미터 추출기능, 레이더 시스템은 칩과 모듈을 통해서 획득한 정보를 바탕으로 제어로직을 수행한다. 실제로 차량용 레이더 센서는 신호 발생과 센싱 기능의 RF보드와 전력과 프로세싱 기능을 갖춘 메인보드로 구성된다. RF보드에는 MMIC(Monolithic Microwave Integrated Circuit)와 안테나가 탑재됐으며, 메인보드는 PMIC(Power Management IC)와 마이크로컨트롤러(MCU)가 탑재됐다. RF보드의 MMIC는 인피니언, NXP반도체, ST마이크로일렉트로닉스가 대표주자이며, 안테나는 컨티넨탈과 보쉬가 대표적인 공급회사이다. 메인보드의 PMIC는 인피니언과 보쉬, NXP가 제공하며, MCU는 인피니언과 NXP가 주로 제공하고 있는 실정이다.
차량용 레이더의 기술 흐름은 경량화, 소형화, 저비용, 기능별 단일 칩에서 다양한 ADAS 기능을 구현할 수 있는 통합 칩으로 바뀌어 가고 있다. RF 보드와 메인보드로 이뤄진 레이더 모듈이 성능과 가격에 따라 두 가지 스타일로 바뀔 것이라고 전망된다. 고성능 레이더 모듈은 다수의 안테나와 다수의 MMIC에 PMIC를 결합하며, DSP와 딥러닝(Deep Learning) 기능을 갖춘 ECU(Electronic Control Unit)가 컴퓨팅 성능을 제공하고, 비용 효율적인 레이더 모듈은 싱글보드의 MMIC 또는 MCU에 안테나와 PMIC를 결합한 형태로 개발될 것으로 예측할 수 있다.
2. 레이더 기반 지능형 모션 센싱
레이더는 전자파를 사용하여 움직임을 감지하며, 일반적으로 움직이는 그림자나 광선, 빗방울 또는 곤충과 같은 거짓 경보를 유발하는 것에 민감하지 않음에 따라서 거짓 경보는 실제 위협으로부터 주의를 분산시킬 가능성이 적고, 비용부담이 적으며, 하루 24시간 정확한 성능을 유지한다. 레이더는 거짓 경보를 최소한으로 유지하여 비디오카메라가 할 수 없는 감지된 물체(예: 정확한 위치 및 움직임의 속도와 방향)에 대한 중요한 정보를 제공한다. 지능형 레이더를 기반으로 하는 모션 감지기는 비디오 감시시스템을 완벽하게 보완해 주는 역할을 한다.
레이더 센서를 활용하여 조명 제어, 자동 문 개폐, 보안 경보 같은 모션 센싱 애플리케이션의 지능화가 이루어지고 있다. 인피니언의 60GHz 레이더 센서 XENSIVTMBGT60LTR11AIP는 60GHz ISM(Industrial Scientic and Medical) 대역에서 동작하는 도플러 모션 센서로서 자율 동작이 가능하고, 최대 5m 거리에서 사람을 감지할 수 있으며 5mW 미만의 전력을 소비한다[5]. 랩탑, 스피커, 태블릿, TV 같은 시스템에 센서를 통합하면 움직임이 감지될 때만 시스템이 가동되어 전력을 절약할 수 있고, 키워드 없이 동작만으로 시스템을 활성화할 수 있는 지능형 레이더 시스템의 핵심기능을 수행한다.
그림 1은 인피니언사의 BGT60LTR11AIP 단일칩 초고주파 집적회로(MMIC)의 기능 블록도를 나타냈다[6]. 저전력 소형의 지능형 모션센싱 시스템을 위하여 안테나를 패키지에 내장(AIP: Antenna In Package)하는 추세이며, 이 MMIC 패키지는 1Tx/1Rx 안테나를 내장하고, 수평 및 수직 반전력 빔폭(Half-power Beamwidth)이 80°를 커버할 수 있는 브로드한 빔 폭과 움직임 탐지기능을 포함하는 3.3×6.7×0.56mm의 소형 패키지로 구성되었다.

3. 지능형 트래픽 레이더 기술
지능형 교통시스템 ITS(Intelligent Transport Systems)는 교통 혼잡을 효율적으로 조정하고 안정성을 증진시키기 위한 차세대 교통시스템이다. 국가 ITS 기본계획을 확정한 이후 전기·전자·정보·통신 등의 첨단 기술을 교통에 적용, 실시간 모니터링 체계로 교통사고 없는 안전한 도로교통, 모든 이용자가 쉽게 이용할 수 있는 편리한 도로교통 등 여러 문제를 해결하고자 기술을 발전시키고 있다. 국내에서 레이더 스타트업 비트센싱이 “2019년 ITS 평가에서 ‘트래픽 레이더’ 성능 최상급 인정”을 받아 지능형트래픽 레이더 기술을 향상시키고 있다[7].
비트센싱의 트래픽 레이더 시스템은 고정밀 실시간 교통정보 센서로, 24GHz 레이더와 풀HD 카메라가 결합되어, 4차선에 다니는 차량의 수, 속도, 사고 상황 등 기존 방식보다 더 정밀한 교통 정보를 실시간으로 모니터링할 수 있다. 그림 2에 ITS를 위한 트래픽 레이더 시연 동영상을 나타냈다[8]. 현재는 도로용 신호 및 과속 단속, 교통량 측정 등에 사용 가능하고, 특히 딥러닝 모델 경량화 기술을 접목하여 기존 레이더보다 성능을 향상시켰다. ‘트래픽 레이더’에 내장된 카메라에 컴퓨터 비전 모델을 적용, 레이더 신호처리 시 영상분석 정보를 결합해 같은 차선에서 여러 대의 차가 같은 속도로 접근할 때도 이를 완벽히 분리해 인식하는 기능을 포함하고 있으며, 내장된 IoT 기능은 차량의 정보를 수집 후 무선으로 서버에 전달하여 측정된 교통량을 활용해 해당 지역의 향후 교통량을 예측하는 빅데이터 사업으로 확장 예측된다[7]. 보다 향상된 지능형 트래픽 레이더 기술의 발전으로 수집된 실시간 교통 데이터 및 통계자료는 스마트시티 및 자율주행에 기여할 것으로 기대된다.

4. 하늘을 나는 PAV 자율비행기술
플라잉카는 하늘을 나는 개인형 이동수단(PAV: Personal Air Vehicle)으로 자율주행기술을 적용, 도심 교통 혼잡 문제를 해결할 수 있는 미래 자동차로 주목받고 있다. 수직 이착륙이 가능하고 조작도 간단해 출퇴근길 도로가 막히면 공중으로 차량을 띄워 도로 위에서 날아갈 수 있는 것이 특징이다[9]. 국토교통부는 2025년 드론택시 상용화를 목표로 ‘한국형 도심항공교통(K-UAM) 로드맵’을 발표하고, K-UAM은 도시 권역 30~50km의 이동 거리를 비행 목표로 하고, 승용차로 1시간 걸리는 거리를 20분 만에 주파할 수 있다고 했다[10]. 시행에 가장 큰 난관은 플라잉카가 주변상황을 판단해 통제할 수 있는 기술과 안정성일 것이다. 사람과 물건을 실을 수 있는 무게, 배터리 용량, 플라잉카의 소음, 항공 교통정리와 인프라 구축 등 해결할 숙제가 많이 남아 있다.
카메라 기술, 라이다 기술, 레이더 기술 등 센서 기술은 기본이고, 주변 물체가 사람인지 자동차인지 빌딩인지 나무인지 인식하고 분석하는 기술이 필수적으로 요구된다. 드론과 플라잉카는 궁극적으로 무인자율비행이 최종 목표이기 때문이다. 고도의 센싱 기술, 인공지능(AI) 기술, 네트워크 기술이 필요함은 물론이다. 긍정적인 면에서 살펴볼 때 플라잉카는 복잡한 도로가 아닌 탁 트인 하늘을 날기 때문에 설정된 경로만 이탈하지 않는다면 하늘은 지상보다 복잡하지 않고 중앙관제소가 통제하기 용이할 수 있어서 자율비행 플라잉카가 완전자율 주행차보다 더 빨리 상용화될 가능성도 기대할 수 있다. 그러나 역시 관건은 수직 이착륙, 소음감소, 배터리에 대한 완성도를 높이는 데 있을 것이다.
Ⅱ장과 Ⅲ장에서는 ETRI에서 개발한 위상배열 기반의 드론탐지용 지능형 레이더 핵심부품과 재난환경에서 인명을 탐지할 수 있는 인명탐지 레이더 기술을 소개한다.
Ⅱ. ETRI 드론탐지용 지능형 레이더
불법 드론으로 인한 개인정보·사생활 침해, 산업기밀 유출, 테러 등 악용사례와 각종 부작용이 속출하면서 피해예방을 위한 ‘안티드론’ 시장도 급성장하고 있다. 불법 드론을 탐지하는 기술은 다양하게 있으나, ETRI는 드론탐지를 레이더 기술로 개발하였으며, AESA(Active Electronically Scanned Array) 기반의 지능형 레이더 시스템으로서 탐지 방위각 ±45°와 고도각 ±22.5°로 침입하는 드론을 탐지할 수 있고, 스캔 빔 폭은 15° 이하로 하여 최소 1초에서 최대 3.5초 이내에 전체 빔 스캔하는 운영시스템으로 구성한다. 소형드론의 탐지거리는 1km 이상을 목표로 하며, 최대속도 27m/s을 비행하는 드론을 탐지할 수 있다. 저가격, 저전력 시스템을 위하여 CMOS RF 송수신 칩과 임베디드 드론탐지 신호처리 플랫폼과 드론과 새를 구별할 수 있는 식별 알고리즘을 보유한 지능형 레이더 시스템으로 구성된다. 표 1에 ETRI 드론탐지 지능형 레이더 시스템 규격을 나타냈다[11].
표 1 ETRI 드론탐지 지능형 레이더시스템 규격[11]
| 규격 | 내용 |
|---|---|
| Target RCS | 소형드론 (RCS=0.01m2) |
| 주파수 대역 | X-band |
| 탐지거리 | 1.5km |
| 탐지각도 범위 | Azimuth 90°/Elevation 45° |
| 거리분해능 | 1m |
| 각도분해능 | <5° 이하 |
| 최대탐지 속도 | <100km/h |
| 송수신 방식 | FMCW |
| 빔조향 방식 | 농동위상배열(AESA) |
| 물체구별 | 드론 식별 |
1. 드론탐지 레이더 시스템 구성
ETRI AESA 기반 드론탐지 지능형 레이더시스템 구성은 8×8 어레이 안테나와 FMCW 신호를 생성하는 FMCW 생성부, FMCW 송신신호를 안테나로 증폭 및 위상변화를 하는 RF 송신기, 8×8위상배열 수신 안테나를 통해 들어온 탐지신호를 저잡음 증폭하고, 저주파 대역으로 변환하며 비트 주파수만을 컷오프하여 ADC로 전달하는 수신부, ADC를 통과한 드론탐지 신호처리부와 빔 제어부 그리고 데이터 연관, 드론추적, 새와 드론을 구별하기 위한 데이터 처리부 그리고 GUI로 구성이 되었다. 개념적인 블록도를 그림 3에 나타냈다.

2. CMOS RF 송수신기 칩
RF 송수신부는 TSMC 65nm GP 공정을 사용하여 4개 칩으로 설계하였다.
송신기는 FMCW 생성칩과 TX 2×2 Core칩으로 구성했다. FMCW 생성칩은 X-band에서 FMCW 신호를 생성하기 위하여 아날로그 PLL 방식으로 설계하였으며, chirp BW 150MHz와 chirp time 250μs을 만족한다. TX 2×2 Core칩은 6bit의 Phase-shifter와 3-stage TX gain을 갖는 Drive Amp로 구성하였다. 수신기는 RX 2×2 Core 칩과 4CH-수신칩으로 구성한다. RX 2×2 Core칩은 LNA와 phase-shifter 그리고 combiner로 구성된다. 4CH 수신칩은 Amp와 Mixer 그리고 BPF(Band Path Filter)와 VGA(Voltage Gain Amp)로 구성된다.
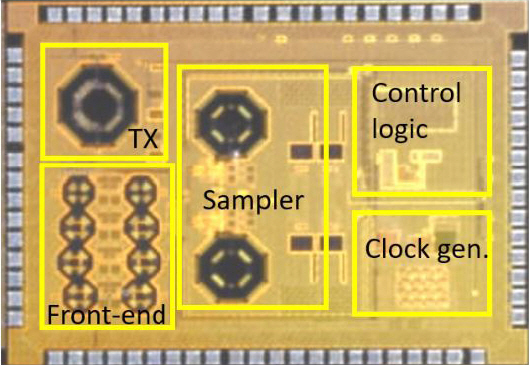
그림 4에 FMCW 생성칩, TX 2×2 Core 칩, RX 2× 2 Core 칩 그리고 4CH-수신칩을 와이어본딩 상태의 칩 사진을 나타냈다[12].

3. 임베디드 신호처리 플랫폼
임베디드 신호 처리부는 4CH의 RF 수신칩에서 출력되는 IF 신호를 4개의 ADC를 통해 수신하고, 표적탐지 및 거리, 속도, 각도 산출을 하며, 클러스트링 기능을 포함한다. 송수신 빔 조향 제어를 담당하며, SPI 인터페이스로 빔제어 모듈을 통제한다. 고속동작을 위해 신호처리 일부 블록을 HW IP로 설계하였으며, 제1차 FFT, 제2차 FFT를 통해 거리, 각도, 속도를 검출하게 되며, 클러스트링 처리를 수행한다. 그림 5에 임베디드 신호처리 플랫폼과 주변 모듈 구성도를 나타냈다.

4. 드론과 새 식별위한 지능 알고리즘
드론을 탐지하는 데 있어서 조류는 가장 일반적인 방해물이며, 드론과 조류는 서로 유사한 RCS(Radar Cross Section)를 가지고 있어 단순히 반사신호 세기를 이용한 분별은 부정확하다. 드론과 조류는 블레이드의 회전과 날갯짓이라는 서로 상이한 미세운동으로 인해 발생하는 미세도플러를 이용한 특성벡터를 추출하여 표적을 분별할 수 있다. 조류와 드론의 표적을 모델링하고, 표적의 시간의 따른 미세도플러 변화도를 STFT(Short-Time Fourier Transform)을 통해 2D 영상을 획득하는 미세도플러 스펙토그램(Spectrogram)으로 특성벡터를 추출하였다. 그림 6에 드론과 조류의 MD(Micro Doppler) 영상과 시간축 푸리에변환 특성을 나타냈다[13].

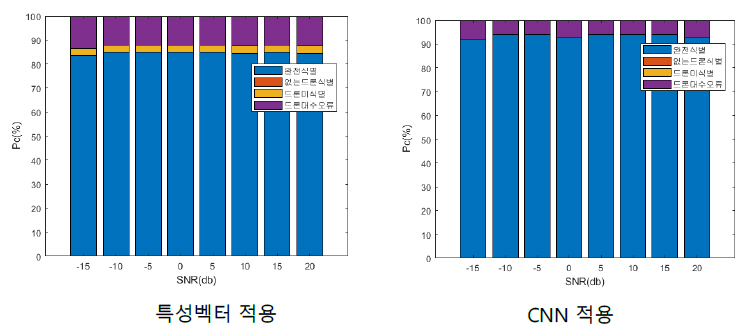
그림 7에 다중표적의 중첩된 MD영상에서 특성벡터와 CNN 알고리즘을 적용할 경우 구별성능 비교를 나타냈으며, CNN 알고리즘을 적용할 경우 미식별된 드론수가 상대적으로 적어 3~4% 정도 성능이 다소 우수한 것으로 예측할 수 있었다. 다중표적일 때 탐지 성능과 식별 성능 향상을 위해 다양한 인공지능 알고리즘이 레이더 시스템에 접목되고 있다.
Ⅲ. ETRI 재난환경 인명탐지 레이더
한치 앞도 보이지 않는 재난환경에서 인명을 탐지하여 생명을 구조할 수 있는 인명탐지기술로 휴대형 레이더 시스템이 최적의 솔루션이라 판단하였다. 개발한 ETRI 휴대형 벽 투과 레이더, 즉 TTWR(Through-The-Wall Radar)은 특히 연기, 벽 및 붕괴된 파편으로 인해 제한된 시야의 재난환경에서 구조 효율성을 향상시킬 수 있으며, 감지 문제를 극복하고 소형 폼 팩터를 유지하기 위한 TTWR SoC(System-On-Chip) 구성 및 아키텍처를 제안하였다. 표 2에 ETRI IR-UWB 방식의 TTWR 인명탐지 레이더 규격을 나타냈다[14].
표 2 IR-UWB 방식의 인명탐지 레이더 규격[14]
그림 8은 제안하는 IR-UWB 기반의 TTWR 레이더 칩 블록도를 나타내며, 벽을 투과하여 인명을 탐지하는 성능뿐만 아니라, 휴대할 수 있는 소형 폼 팩터를 위한 재구성형 레이더 칩을 구성하였다. 송신부(TX), 수신부(RX), 레이더 제어부(Controller) 및 기저대역 증폭 및 클럭생성부(BBA, CLK gen)로 나눌 수 있다. 레이더 탐지 기능은 송수신부가 클럭에 동기되어 동작함으로써 구현된다. 그림 9는 레이더 수신 펄스 파형과 클럭의 변화에 따른 샘플링위치와 샘플된(수신된)파형을 나타냈다[14].


표 3에는 상용 TTWR과 그 기능을 나열하였다[16-20]. 작동 주파수는 장애물, 목표 해상도 및 시스템 폼 팩터에 대한 손실을 기준으로 선택해야 한다. 일반적으로 긴 파장의 전파가 투과에는 효율적이나 안테나 사이즈가 커지는 단점이 있다. 변조 방식과 대역폭에 따라 목표 해상도와 목표 식별 알고리즘이 결정되며, 유사 상용제품은 대부분 임펄스(UWB) 방식을 채택하고 있으며, 연속파(CW) 변조에 비해 시간 영역 벽 분리 및 전면 벽과의 상호 작용 감소가 장점이 있기 때문이다.
표 4는 제안한 Radar Transceiver IC와 타 TTWR 제품의 칩과의 비교를 나타내고 있으며, 그림 10에 걷는 사람에 대한 실험결과로 (a) A-scan raw data와 (b) 프레임에 따른 타겟 위치를 나타내고 있다[15,21-24]. 10m 범위에서 정교한 해상도로 검출됨을 확인할 수 있으며, 그림 11에 제작한 TSMC 0.13μm 공정의 IR-UWB 기반의 TTWR 인명탐지 레이더 칩 사진을 나타냈다.
표 4 Radar transceiver ICs와 타 TTWR 칩 비교[15]
| Features | This work | [21] | [22] | [23] | [24] |
|---|---|---|---|---|---|
| DUT (Weight) | Prototype system (0.9kg) | Commercial product (7.5kg) | Test board (-) | Test board (-) | Test board (-) |
| Transceiver | Radar SoC | Discrete module | Radar SoC | Radar SoC | Radar SoC |
| Integration (Tech.) | TX/RX/Logic (130n) | Discrete ICs | TX/RX (130n) | TX/RX/ADC (55n) | TX/RX (130n) |
| Target | Through-wall | Through-wall | Walking | Breathing | Movements (2.5mm) |
| Operation | UWB | UWB | UWB | UWB | Impulse |
| Frequency band (GHz) | 3~5 | 0.4 ± 30% | 0.8~5 | 7.29 ± 1.4 | 0.5~1 |
| Rmax,ΔR (m, cm) | 15, 15 | 12, 7.5 | 15, 0.75 | 9, – | –, 0.25 |
| Precision (mm, ps) | 15 | NA | 659 | 4.2b | 2.5 |
| Power dissipation (mW) | 115 | NA | 659 | 118 | 30 |
| Chip area (mm2) | 3.1 | NA | 11.9 | 8.6 | 1 |

Ⅳ. 결론
본 고에서는 레이더가 카메라 및 통신과 융합하여 자율주행/자율비행, 교통감시의 핵심기술로 적용되며 스마트시티, 홈 건물에서의 무선센싱, 드론탐지 등 다양한 센싱 응용에 활용되고 있는 지능형 레이더 기술 동향을 살펴보았으며, 본 연구실에서 개발하고 있는 소형무인이동체 탐지를 위한 AESA 기반의 지능형 레이더 시스템의 핵심 반도체 기술과 안개와 벽, 붕괴 잔해물 등을 투과하여 재난 환경에서 인명을 탐지할 수 있는 TTWR 지능형 레이더 핵심 반도체 기술을 소개하였다. 점차 고해상도의 저전력 초소형 레이더 기술의 응용분야가 확대될 것으로 생각되며, 타 센싱 기술과 융합하여 지능형 시스템으로 향상 발전할 것으로 기대된다.
용어해설
RADAR (RAdio Detection And Ranging) 전자기파를 물체에 발사하여 반사되는 신호를 분석하여 물체를 식별하거나 위치, 속도 등을 탐지하는 장치
LIDAR (Light Detection and Ranging) 레이저 빔을 목표물에 비춤으로써 사물까지의 거리, 방향, 속도, 온도, 물질 분포 및 농도 특성 또는 3D 영상 정보를 수집할 수 있는 기술
V2X (Vehicle to Everything) 유무선망을 통해 차량과 차량, 도로 등 인프라, 모바일 기기 등과 정보를 교환하는 기술
SAR (Synthetic Aperture Radar) 반사된 레이더 수신 신호를 이용하여 관심 영역을 고해상도 이차원 영상의 형태로 도시하는 레이더
약어 정리
SAE International J3016 2016. 10, https://pdfs.semanticscholar.org/5962/a3287865a8453ddc7832340df322ea0f0bd0.pdf
S. Carpenter, "자율 주행 자동차 레이더: 시뮬레이션을 통한 레이더 성능 향상," Ansys Advantage Magazine, 제12권 제1호, 2018. https://www.ansys.com/ko-kr/about-ansys/advantage-magazine/volume-xii-issue-1-2018/autonomous-vehicle-radar
Techworld, "차량용 레이더의 기술 이해와 기술 전망," 2018. 8. 10, https://www.epnc.co.kr/
e4ds news, "자율형 레이더 센서로 지능형 모션 센싱 구현하려면?," 2020. 11. 18, https://www.e4ds.com/sub_view.asp?ch=2&t=0&idx=12312
bitsensing, https://www.youtube.com/watch?v=4HzikLbH-qM
일간스포츠, "[이코노미스트] 자율주행차 멈춘 사이 먼저 난다," 2019. 10. 20, http://m.isplus.joins.com/news/article/article.aspx?ctg=1100&Total_ID=23609139#_enliple
관계부처 합동, "도시의 하늘을 여는 한국형 도심항공교통(K-UAM) 로드맵," 2020. 5, https://www.molit.go.kr/USR/NEWS/m_71/dtl.jsp?id=95083976
구본태 외, "비가시, 붕괴잔해물/벽을 투과하여 인명탐지 및 구조자 안전 확보를 위한 개인 휴대/부착형 인명탐지 센서 및 시스템 개발," 2연차 보고서, 2020. 11.
P. Park et al., "An impulse radio (IR) radar SoC for through-the-wall human-detection applications" ETRI J. vol. 42, no. 4, pp. 480-490.
Camero-tech, XAVER 100, https://www.camero-tech.com/xaver-products/xaver-100/
GEOTECH RO-400 2D, http://geotechru.com/gpr-detector-ro-400-2d/
H. Burchett, "Advances in through wall radar for search, rescue and security applications," in Proc. IET Conf. Crime Secur. London, UK, June 2006, pp. 511–525.
N. Scmcykin, A. Dudnik, and V. Monahov, "Low frequency throughwall radar-detector," in Proc. Int. Conf. Ground Penetrating Radar, Brussels, Belgium, June 2014, pp. 819-822.
T. S. Chu et al., "A short-range UWB impulse-radio CMOS sensor for human feature detection," in Proc. IEEE Int. Solid-State Circuits Conf. San Francisco, CA, USA, Feb. 2011, pp. 294-296.
N. Andersen et al., "A 118-mW pulse-based radar SoC in 55-nm CMOS for non-contact human vital signs detection," IEEE J. Solid-State Circuits, vol. 52, no. 12, 2017, pp. 3421–3433.

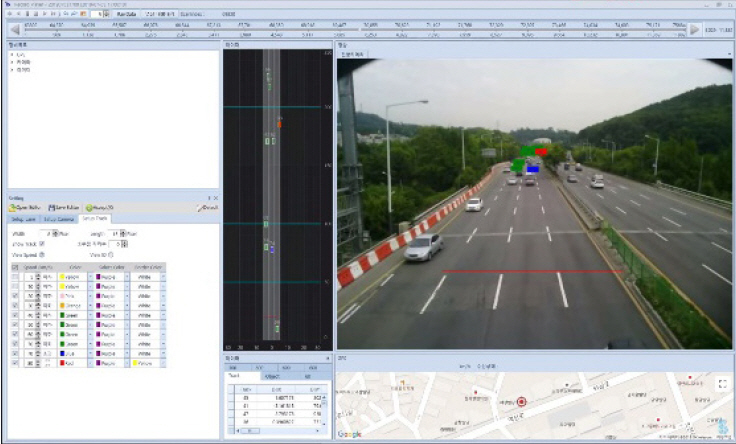
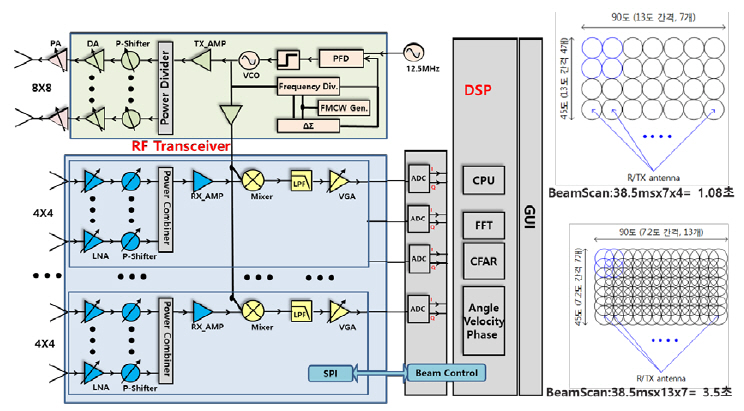
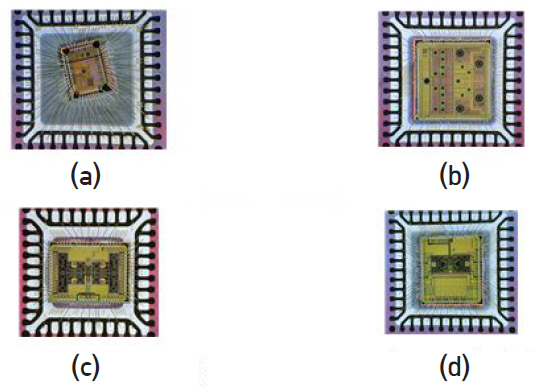
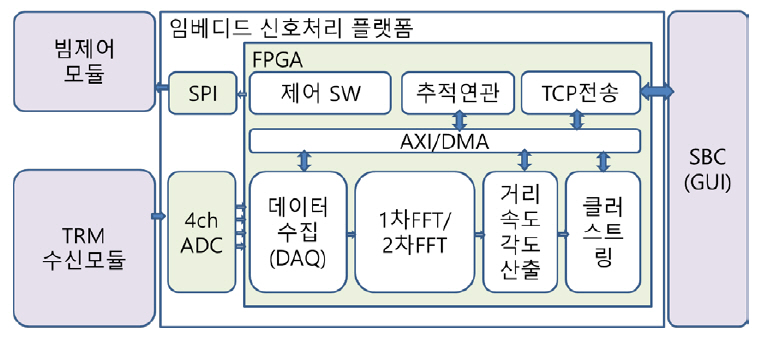
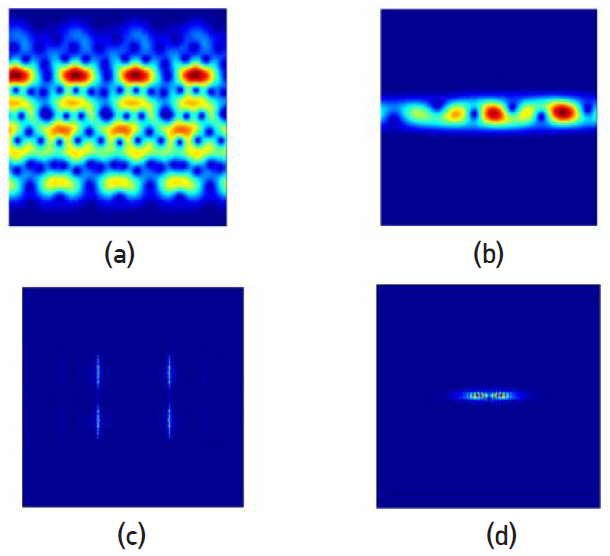





표 1 ETRI 드론탐지 지능형 레이더시스템 규격[11]
| 규격 | 내용 |
|---|---|
| Target RCS | 소형드론 (RCS=0.01m2) |
| 주파수 대역 | X-band |
| 탐지거리 | 1.5km |
| 탐지각도 범위 | Azimuth 90°/Elevation 45° |
| 거리분해능 | 1m |
| 각도분해능 | <5° 이하 |
| 최대탐지 속도 | <100km/h |
| 송수신 방식 | FMCW |
| 빔조향 방식 | 농동위상배열(AESA) |
| 물체구별 | 드론 식별 |
표 2 IR-UWB 방식의 인명탐지 레이더 규격[14]
표 4 Radar transceiver ICs와 타 TTWR 칩 비교[15]
| Features | This work | [21] | [22] | [23] | [24] |
|---|---|---|---|---|---|
| DUT (Weight) | Prototype system (0.9kg) | Commercial product (7.5kg) | Test board (-) | Test board (-) | Test board (-) |
| Transceiver | Radar SoC | Discrete module | Radar SoC | Radar SoC | Radar SoC |
| Integration (Tech.) | TX/RX/Logic (130n) | Discrete ICs | TX/RX (130n) | TX/RX/ADC (55n) | TX/RX (130n) |
| Target | Through-wall | Through-wall | Walking | Breathing | Movements (2.5mm) |
| Operation | UWB | UWB | UWB | UWB | Impulse |
| Frequency band (GHz) | 3~5 | 0.4 ± 30% | 0.8~5 | 7.29 ± 1.4 | 0.5~1 |
| Rmax,ΔR (m, cm) | 15, 15 | 12, 7.5 | 15, 0.75 | 9, – | –, 0.25 |
| Precision (mm, ps) | 15 | NA | 659 | 4.2b | 2.5 |
| Power dissipation (mW) | 115 | NA | 659 | 118 | 30 |
| Chip area (mm2) | 3.1 | NA | 11.9 | 8.6 | 1 |
출처 P. Park et al., “An impulse radio (IR) radar SoC for through-thewall human-detection applications,” ETRI J. vol. 42, no. 4, pp. 480-490. 기반 재작성
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.