지능형 물류/농업분야의 로봇작업지능 기술 동향
Technical Trends of Robot Task Intelligence in Intelligent Logistics/Agriculture
- 저자
-
유원필로봇작업지능연구실 ywp@etri.re.kr 이유철로봇작업지능연구실 yclee@etri.re.kr 김동형로봇작업지능연구실 donghyungkim@etri.re.kr
- 권호
- 36권 2호 (통권 189)
- 논문구분
- 일반논문
- 페이지
- 22-31
- 발행일자
- 2021.04.02
- DOI
- 10.22648/ETRI.2021.J.360203
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- This report introduces a definition for robot task intelligence and explains the basis of the challenges associated with implementing robot task intelligence in real-world problems. Two fundamental elements of this intelligence, robot manipulation and navigation, are introduced herein. We describe the existing trends and industrial applications of the robot task intelligence in logistics and agricultural automation. Furthermore, as an underpinning technology for this intelligence, we review the existing three-dimensional position estimation techniques and summarize the difficulties associated with applying pure SLAM technology to real-world applications. Finally, we discuss the prospects of the robot task intelligence research and its potential for solving real-world problems.
Share
Ⅰ. 서론
로봇작업지능(Robot Task Intelligence)은 주위환경에서 획득한 상황인식을 기반으로 로봇이 어떤 작업을 어떤 순서로 실행할 것인지를 결정하는 지능을 지칭한다[1]. 이때 해당 작업의 요구사항을 만족하기 위해 다양한 로봇행동을 수립하며, 이를 구현하는 동작계획을 포함한다.
로봇의 경우, 센서를 이용하여 획득한 환경데이터의 불완전한 정보, 작업환경 내의 동적인 변화에 의해 작업계획, 그리고 관련된 동작계획은 불확실성이 수반된다. 이러한 불확실성을 어떻게 지능적으로 처리할 것인가는 해당 로봇시스템의 작업지능을 가늠하는 척도가 될 것이다. 이것은 또한 작업지능의 물리적 발현을 담당하는 로봇조작(Manipulation)과 로봇주행(Navigation)기능의 성능을 판단하는 척도이기도 하다.
최근의 산업현장은 작업안전, 생산성 향상 등 다양한 동인에 의해 자동화 요구가 큰 수요를 창출하고 있다. 전통적인 제조현장에서의 자동화를 포함하여, 물류, 자율주행차량, 드론, 농업, 건설 등 다양한 현장에서 로봇을 이용한 자동화 추세가 뚜렷하게 나타나고 있다.
본 고에서는 다양한 산업현장 중 물류와 농업자동화에 관련하여 로봇작업지능 관점에서의 산업동향을 살펴보고, 관련 기술의 향후 전망에 대해 살펴보고자 한다. Ⅱ장에서는 물류자동화를 위한 로봇작업지능의 적용현황과 전망에 대해 살펴본다. Ⅲ장에서는 농업자동화를 위한 로봇작업지능, 특히 로봇주행기능에 기반한 로봇이동지능의 적용현황과 전망에 대해 살펴본다. Ⅳ장에서는 산업현장에서 로봇작업지능을 구현하기 위해 필수적인 3차원 로봇위치인식기술의 적용현황과 전망에 대해 살펴본다. 마지막으로 Ⅴ장에서 로봇작업지능의 전반적인 향후 전망을 소개한다.
Ⅱ. 물류자동화를 위한 로봇작업지능
1. 로봇조작지능
기업의 다품종 소량생산 물류와 개인 물류는 비정형성으로 인해 기존의 정형화된 조건에서만 유효한 자동화 장비로는 다룰 수 없다. 대표적인 예시가 물류센터의 택배 분류작업 또는 구분작업으로, 현재까지도 작업자가 수작업으로 처리하고 있다. 이처럼 노동강도가 매우 높은 분류작업 또는 구분작업의 자동화는 로봇이 사람의 일자리를 빼앗는 것이 아니라 로봇이 사람의 노동환경을 개선해 주는 것이다. 따라서 로봇조작지능을 적용한 자동화의 필요성이 매우 크다고 할 수 있다.
본 고에서는 물류자동화를 위한 로봇조작지능 기술을 다음과 같이 크게 두 가지로 구분한다. 첫 번째는 불규칙적으로 적재된 비정형 물류를 컨베이어와 같은 특정 위치에 내려놓는 디팔레타이징이고, 두 번째는 비정형 물류를 팔레트에 쌓아 올리는 팔레타이징이다. 비정형 물류를 대상으로 한 팔레타이징과 디팔레타이징 둘 다 3D 비전 센서를 사용하여 물류를 인식하고 다관절 로봇이 그리퍼로 박스를 픽&플레이스해야 하는 점은 유사하지만, 팔레타이징에서는 마치 3D 테트리스 게임을 하듯이 물류들을 빈틈없이 쌓아야 할 뿐만 아니라 적재된 물류가 무너지지 않아야 하므로 팔레타이징이 디팔레타이징보다 난이도가 높다. 이러한 사유로 비정형 디팔레타이징은 DHL, Amazon과 같이 국외 유명 물류기업뿐만 아니라 국내·외 사례가 매우 많은 반면, 비정형 팔레타이징에 대해서는 일본 Mujin, 스위스 Swisslog, 중국 Dorabot의 사례가 유일하다. 그러므로 본 고에서는 이 3가지 비정형 팔레타이징 사례를 자세히 살펴보기로 한다. 앞서 언급한 국내·외 기업의 비정형 디팔레타이징/팔레타이징 사례들은 개발된 기술을 자체 실험실에서 데모를 수행하거나 로봇에게 맞춰진 물류현장에 적용한 수준으로, 대부분의 복잡한 물류 산업에서 쉽게 도입할 수 없다.
Mujin[2], Swisslog[3], Dorabot[4]을 대상으로 각각 비정형 팔레타이징의 평균 작업 속도, 물류 공급 순서, 물류 공급 위치 및 방향을 비교하면 표 1과 같다. Mujin과 Dorabot은 로봇의 작업영역 내 임의의 위치에 무작위로 공급되는 물류를 대상으로 팔레타이징을 하는 반면, Swisslog는 로봇이 한꺼번에 여러 개의 물류를 처리할 수 있도록 주변 자동화 장치를 활용하여 다수의 물류가 정해진 위치에 순서대로 공급된다. 각 기업의 비정형 팔레타이징 특징은 다음과 같다.
표 1 비정형 물류 팔레타이징 사례 비교
| 평균 작업 속도 | 물류 공급 순서 | 물류 공급 위치 및 방향 | |
|---|---|---|---|
| Mujin 일본[2] | 10초/개 | 무작위 | 로봇 작업영역 내 임의의 위치로 공급 |
| Swisslog Logistics 스위스[3] | 14.4초/4개 | 사전에 정의된 순서대로 공급 | 항상 정해진 위치로 공급 |
| Dorabot 중국[4] | 9초/개 | 무작위 | 로봇 작업영역 내 임의의 위치로 공급 |
먼저 일본 기업인 Mujin은 다관절 로봇이 비정형 팔레타이징을 수행하기 위한 3D 비전 시스템과 로봇 제어기를 개발하였다. 3D 비전 시스템은 사전에 등록된 박스 형태의 물류에 대해서만 인식할 수 있고, 로봇 제어기가 적재 순서 계산 기능(Advanced order calculation)을 통해 효율적인 적재 패턴을 생성한다. 또한 Mujin의 제어기는 3D 비전 시스템과 함께 다양한 브랜드의 산업용 로봇과 호환이 가능하다는 장점이 있다.
두 번째로 스위스의 Swisslog Logistics는 한 번에 서로 다른 4개 물류를 파지할 수 있는 4 포크 로우 그리퍼(4 fork row gripper)를 사용한다. Swisslog Logistics에서는 물류를 인식하지 않으므로, 다관절 로봇 외에도 물류를 미리 정해진 순서 및 위치로 공급하기 위한 장비들을 구축해야 한다. 그리고 Mixed case palletizing software라는 혼재된 물류의 적재 패턴을 계획하는 소프트웨어를 개발함으로써 다관절 로봇이 그리퍼로 복수의 물류를 효율적으로 적재할 수 있도록 하였다.
마지막으로 중국의 Dorabot은 복수의 석션 컵으로 구성된 진공 그리퍼와 박스 상단 및 측면을 동시에 파지 가능한 2면 진공 그리퍼를 사용한다. Dorabot의 3D 비전 시스템에서 대상 물류뿐만 아니라 로봇 주변 환경을 인식하므로 물류가 다양한 위치 및 방향으로 공급되어도 인식할 수 있다. 또한 물류의 크기에 따라 안정적인 물류 적재 패턴을 자동으로 생성하도록 로봇의 소프트웨어를 구현하였다. 다관절 로봇 1대가 동시에 최대 4개 팔레트를 대상으로 팔레타이징이 가능하도록 로봇 작업 시스템을 구축하였는데, 혼재된 물류가 공급되어도 물류의 바코드를 읽고 해당 물류에 적합한 팔레트로 적재하는 것이다.
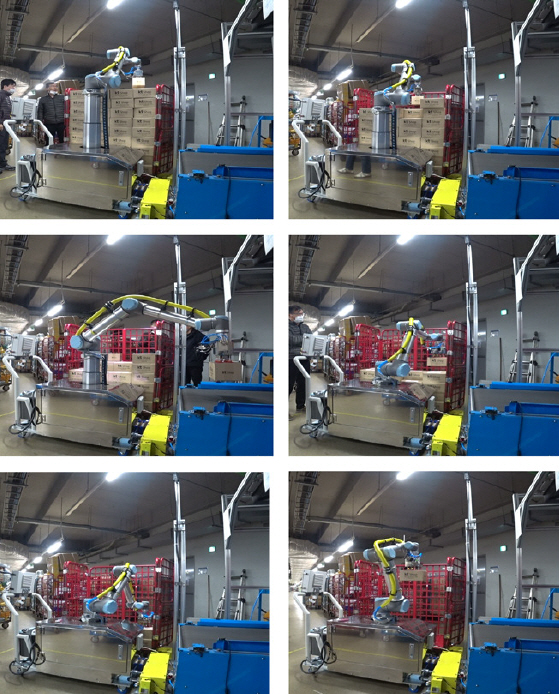
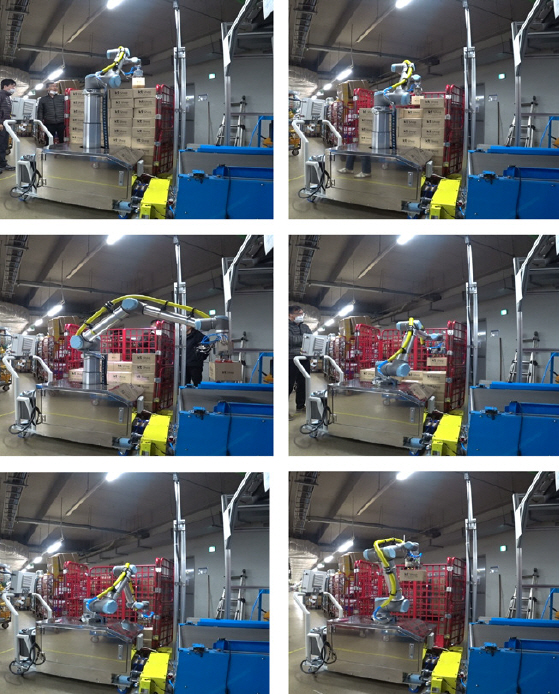
본 연구실에서는 2020년 11월에 로봇작업지능을 안양우편물류센터 소포 디팔레타이징 작업 현장에 적용하였다(그림 1). 소포 디팔레타이징은 로봇이 소포를 집어서 컨베이어벨트에 내려놓기를 반복하는 작업으로, 앞서 사례와 동일하게 로봇이 픽-앤-플레이스 동작을 반복하지만 소포가 롤테이너에 담겨서 공급되므로 로봇이 소포를 파지할 때 롤테이너와 충돌하지 않는 동작을 생성하는 점에 있어서 기존 사례들과 차별성을 지닌다. 로봇이 처리 가능한 소포는 기업이 대량으로 발송한 계약 소포로, 롤테이너에 동일한 소포가 적재되어 있고 기계로 테이핑하므로 박스의 겉포장 상태가 양호하다. 단, 적재 패턴은 무작위이므로 비정형성은 여전히 남아 있다. 이 로봇의 소포 개당 처리 속도는 평균 7초이다.
앞서 사례들을 통해 물류산업에서 로봇조작지능을 적극적으로 도입하고 있는 것을 알 수 있었다. 기존 물류센터는 사람의 업무환경에 맞춰 설계되었으므로, 당장의 전망으로는 로봇에게는 로봇이 처리할 수 있는 비정형 물류만 공급하고 나머지는 작업자가 처리하는 것과 같이 로봇작업지능이 사람과 로봇이 협업하는 조건에서 상용화가 가능할 것으로 보인다. 향후 물류 로봇을 적극적으로 활용하기 위한 새로운 물류센터가 계획되면 앞서 언급한 분류작업 또는 구분작업뿐만 아니라 더욱 광범위하게 로봇작업지능이 활용될 것으로 예상한다.
2. 로봇이동지능
물류자동화와 관련하여 물동량의 급격한 증가와 창고 내 이송작업의 자동화에 대한 수요가 크게 증가하였다. 다중 이송로봇을 이용한 아마존의 물류창고 내 배송시스템이 대표적인 사례이다. 아마존 로보틱스 외에도 ADEPT, 로커스 로보틱스, Clearpath 로보틱스, GreyOrange 로보틱스, Fetch 로보틱스, InVia 로보틱스 등 상당수의 물류자동화 로봇업체가 등장하였고, 로봇작업지능이 현장에서 운용되는 대표적인 사례이다. 특히, 복수의 이송로봇을 관리하는 FMS솔루션 개발이 경쟁적으로 진행되고 있다.
FMS솔루션의 주요 기능으로는 주어진 운용시나리오와 요구 물동량을 기반으로 작업을 할당하는 스케줄링, 경로배치와 충돌방지 관제 등 교통제어, 자동충전 및 파킹(Parking)의 원활한 운용을 위한 정책수립, FMS 시뮬레이션을 통한 최적 레이아웃 산출 기능이 대표적이다. 또한 기존의 물류관제시스템과의 인터페이스, 물류작업공간의 디지털화(Mapping)를 위한 표준화된 공간모델링 방식이 필요하다[6].
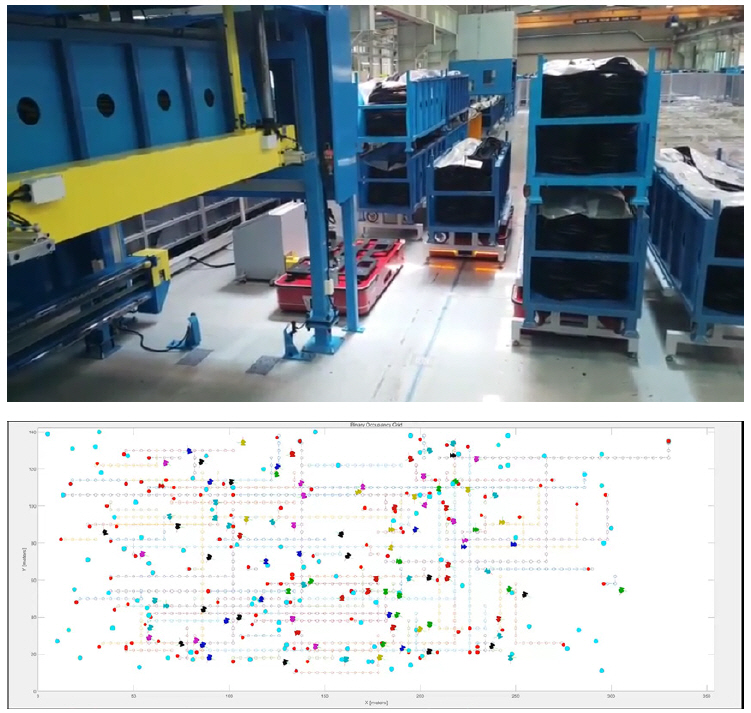
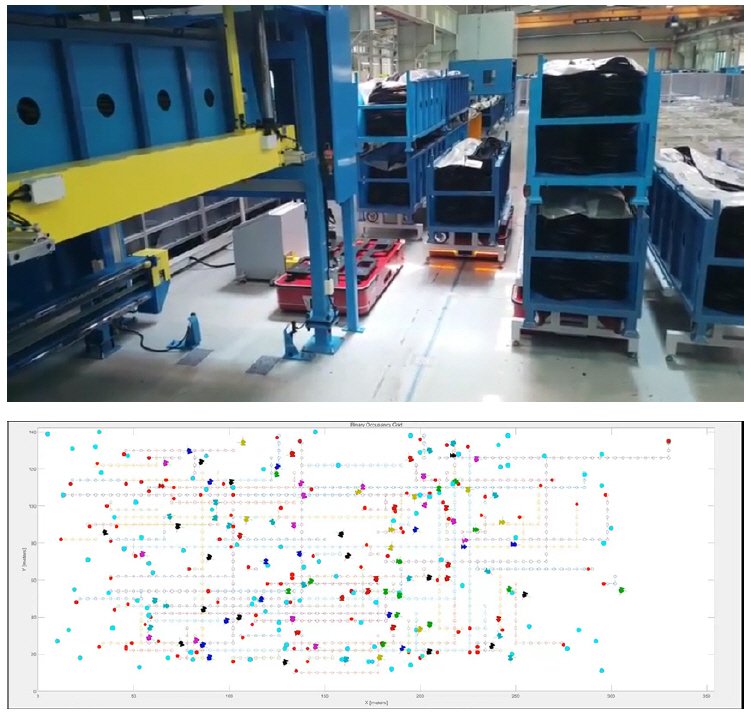
한편, FMS의 구조를 결정하는 것은 운용시나리오와 시스템 아키텍처에 의존하는 것으로 분산제어와 중앙집중제어로 크게 나뉜다. 분산제어는 지역 정보만을 이용하여 로봇을 배치하는 방식이어서 구현이 간단하고 즉각적인 대응이 가능한 장점이 있으나 전체적인 물류 효율을 보장하기 어렵다는 단점이 있다. 중앙집중제어 방식은 중앙서버가 시스템 내의 모든 정보를 관할하면서 로봇의 스케줄링을 처리하는 것이다. 상황대처에 대한 일관성과 물류 효율을 보장하고 안전측면에서도 장점이 있으나 구현이 어려운 측면이 있다. 중앙집중제어 방식도 거리기반, 요구물동량 기반, 혹은 time-based 규칙에 따라 다양한 스케줄링 방식을 고려해 볼 수 있는데, 현장의 상황에 적합한 방식을 선택할 수 있도록 FMS가 설계되어야 할 것이다. 이 외에도 운영관점에서 로봇 경로결정 방식, 충돌상황 시 해결방식, 교차로에서의 교통제어, 영역(Zone)별 교통계획 등 다양한 시나리오를 관리해야 하고, 특정 로봇이나 서버시스템에 종속성을 가지지 않아야 하므로 상당한 수준의 연구개발이 필요한 부분이다. 그림 2는 이상에서 설명한 FMS솔루션의 기능적 구조를 토대로 본 연구실에서 제조물류현장에 적용한 멀티로봇시스템 실제 사례와 개발된 시뮬레이터의 스케줄링 기능을 나타낸다.
Ⅲ. 농업자동화를 위한 로봇작업지능
본 절에서는 로봇주행기능을 이용한 로봇이동지능의 농업자동화 적용현황에 대해 살펴본다. Ⅱ장 1절에서 로봇조작지능을 이용한 물류자동화 적용사례를 소개하였으나 수확, 생육 등 농작업의 경우는 비정형 요소가 더욱 크기 때문에 실제 현장에 상업적 적용은 어려운 형편이다. 따라서 트랙터, 콤바인, 이앙기, 제초기, 방제기 등 주요 농기계의 주행자동화에 적용된 로봇이동지능 기술을 중심으로 현황을 살펴본다.
농작업은 작물별 작업이 상이하고 지역별로 작업규모와 패턴이 상이하여 환경분석이 중요하다. 예를 들어, 로봇기술을 이용한 다양한 작업기술이 국내 농가의 경우에는 규모의 차이, 시장성 등의 이유로 실제 적용이 어려운 경우가 많다. 특히, 북미의 경우 농장규모가 평균 1,653,000m2인 것에 비해 국내의 경우 약 1/100 정도이다[7].
북미나 유럽의 경우, 대형농장 중심의 다양한 로봇이동기술이 상용화되고 있다. 대표적인 사례가 고정밀 GPS를 이용한 자동조향장치와 가이던스 제품이다. 글로벌 제조사의 경우 cm급의 RTK-GPS 기반의 위치서비스를 위해 자체 위성보정신호를 제공하는 구독서비스를 제공하고 있다. Trimble, Topcon 등 GNSS 수신기 제조사에서도 오래 전부터 자동조향장치와 연계한 자율이동보조시스템에 대한 제품을 개발하고 있다. 특히, RTK-GPS 정보의 정확성을 이용하여 작업동선을 미리 레코딩한 후에 해당 동선을 추종하는 teaching 기반의 동작생성기술은 해외의 경우 이미 보편화되어 있는 실정이다[8]. 또한, 자율이동을 위해 농경지의 경사를 이동 중 센싱하여 실시간으로 보정하는 이른바 Ground compensation 기법을 이용한 제품도 실제 제품화 및 농기계에 탑재되고 있다.
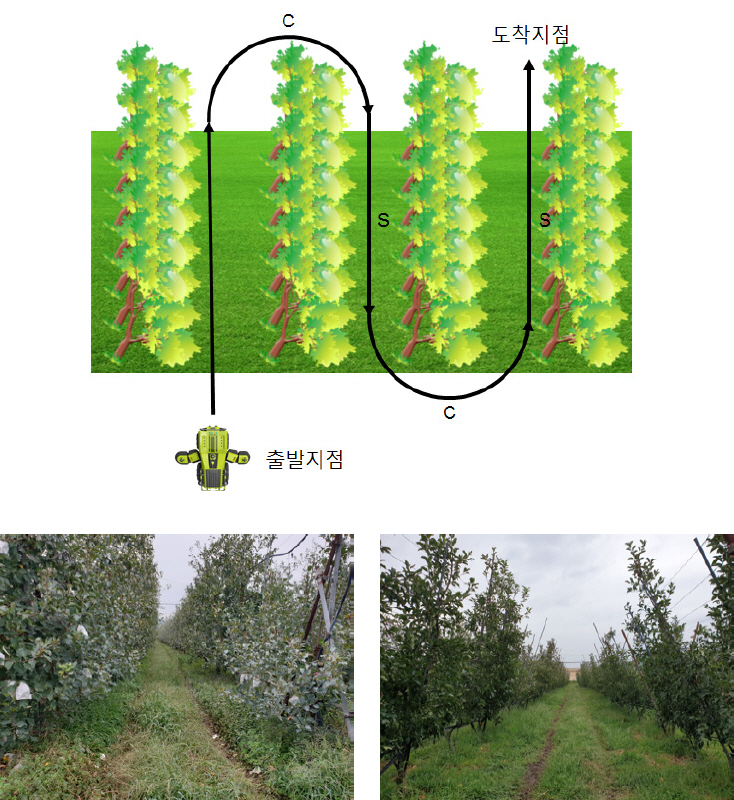
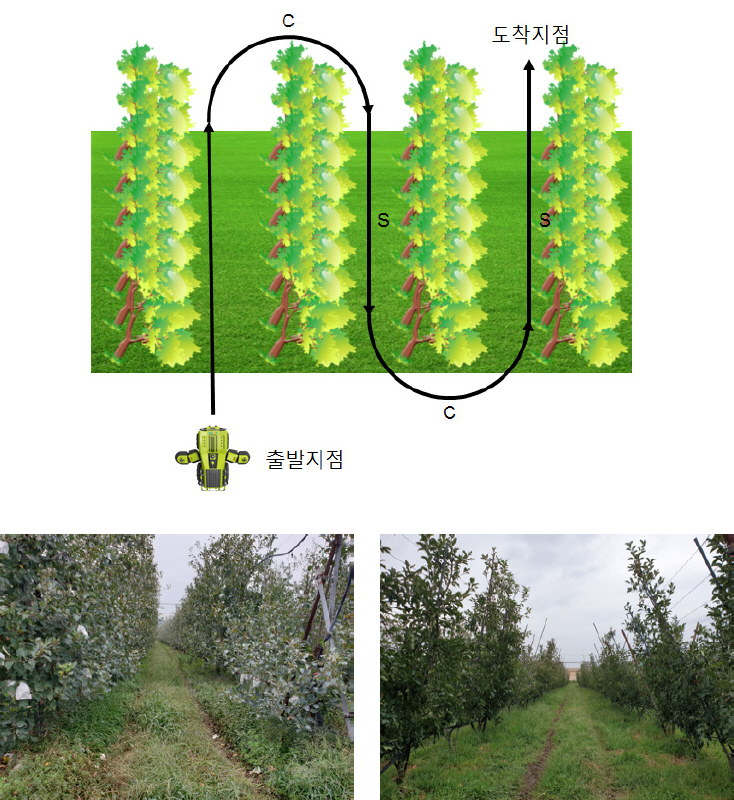
국내의 경우, 중소규모, 밀집 재배와 같은 작업환경 특성상 대규모 경작지를 대상으로 하는 자율이동기술은 보급의 속도가 더딘 편이다. 그럼에도 불구하고 3D 라이다, Depth 카메라, 딥러닝기반의 인식기술의 등장으로 작업환경의 비정형, 동적 특성에 강인한 로봇이동지능의 구현이 용이해지고 있다. 특히, 그림 3의 사례와 같이 비교적 협소한 과수열 간 사이에서도 정확한 Positioning이 가능할 정도로 GNSS 종류와 위성의 개수가 많아짐에 따라 경제성 이슈는 향후 점차적으로 비중이 작아질 것으로 전망한다.
또한, 이앙작업 시 직진 및 선회동작의 자동화를 위한 IoT와 로봇응용사례, 경작지 주행을 위한 트랙터 자율주행 등 국내 농작업 환경을 고려한 로봇이동지능의 연구개발이 활발히 진행되고 있다.
한편, 로봇이동지능연구는 환경인지기반의 수준 높은 자동화를 목표로 해야겠지만, 현장 작업자의 숙련된 작업지식과 경험을 로봇기술로 대체하는 것은 여전히 어려운 일이다. 이러한 관점에서 그림 4의 비가시권 원격운전 수준의 로봇이동지능을 구현하는 것은 저지연 통신망 혹은 WiFi매쉬네트워크를 이용하여 비교적 손쉽게 구현이 가능하다. 그림 4는 LTE라우터를 이용하여 스마트폰으로 원격운전을 구현한 인터페이스의 사례를 나타낸다.
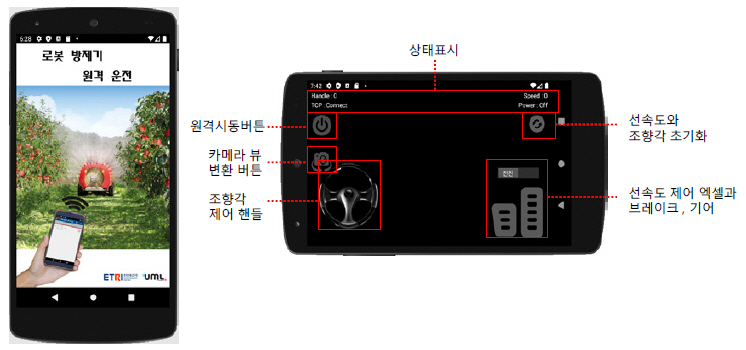
이러한 인터페이스를 통해 작업자의 숙련된 경험과 로봇기술을 연계하여 더욱 효과적이고 편리하게 농작업을 수행할 수 있을 것이다. 그러나 비교적 낮은 단계의 자동화 기술임에도 불구하고 사용편이성, 확장된 시야각 확보, 지연 없는 로봇제어, 통신망 도입비용 등은 여전히 개선의 여지가 있는 기술적 난제이다.
Ⅳ. 로봇작업지능을 위한 3D위치인식
이 장에서는 Ⅱ, Ⅲ장에서 소개한 로봇작업지능의 물리적 발현을 위해 필수적인 3차원 환경에서의 로봇위치인식기술의 현황과 전망에 대해 소개한다.
산업현장의 경우 여러 공정이 연계되어 운영되는 만큼 로봇작업지능에서의 기본 요구사항은 기술의 성숙도와 안정성이다. 특히, 정확한 로봇위치인식 관점에서 세 가지 이슈를 동시에 만족할 수 있는 해결책이 필요하다.
첫 번째는 공간에 대한 규격화된 지도의 작성이다. 로봇이 주행기술을 통해 목적지에 성공적으로 도착하기 위해서는 주변 환경을 정확하게 인식하고, 이를 규격화된 지도로 생성하는 기술이 필요하다.
두 번째는 동적 환경에서의 안정성이다. 동적 환경이란 로봇이 주행할 때 주변 사물 또는 사용자의 위치가 빈번히 변경되는 공간을 의미한다. 특히, 배송업무를 담당하는 로봇의 작업공간의 경우 물류에 해당하는 사물의 위치가 빈번히 변경되기 때문에 동적 환경에서 기술의 사용 가능성이 반드시 확보되어야 한다.
마지막 이슈로는 전역 위치인식기술의 확보이다. 로봇이 주행을 위하여 임의의 위치에서 가동되었을 경우 공간지도상에 자신의 초기 위치를 정확히 탐지할 수 있어야 한다.
다음에서는 언급된 세 가지 이슈에 대하여 한계와 해결책을 단계적으로 살펴보고자 한다. 그리고 최신에 확보된 3차원 라이다(LiDAR)를 활용한 기술을 간단히 소개하며 그 발전 가능성을 소개하고자 한다.
1. 규격화된 공간지도작성
공간지도작성은 자신의 현재 위치를 기반으로 로봇이 활동하는 공간의 구조, 물체, 시멘틱 정보 등을 규격화된 형식으로 제작하는 것이다. 그리고 위치인식은 형성된 지도를 바탕으로 현재 자신의 정확한 위치가 어디인지를 추정하는 것이다. 이렇게 지도작성과 위치인식기술은 상호 의존적이기 때문에 “닭과 달걀 중 어느 것이 먼저인가?”의 질문처럼 두 기술 사이에 우선순위를 가리기 힘들다. 따라서 지난 수십 년간 학계를 중심으로 주위의 환경에 대한 지도를 정확히 작성하면서 동시에 자신의 위치를 추정하는 SLAM은 많은 연구와 발전을 이루었다[10,11].
SLAM에서 가장 해결하기 어려운 문제는 지도작성과 위치인식의 상호 의존성이며, 지금까지 근본적인 해결책은 없다. SLAM은 환경 인식 센서를 통해 측정된 정보를 사용하여 지도작성과 위치 인식을 동시에 수행한다. 이는 SLAM의 기본원리가 위치인식과 지도작성이 동등한 우선순위로 동작하는 구조이기 때문에 가능한 것이다. 하지만 SLAM에서 지도작성과 위치인식 사이의 의존성은 어느 하나가 부정확할 경우, 다른 하나는 더 부정확해지는 발산(Diverge)의 문제가 있다. 이것은 SLAM에 사용되는 센서와 활용되는 공간에 따라 발생의 여부가 달라지기 때문에 SLAM 구조상 알고리즘으로 해결하기 어렵다.
따라서 안정적 로봇주행이 필요한 산업 분야에서는 지도작성과 위치인식을 분리하여 SLAM 기술을 활용하는 것이다. 이는 사전에 정확히 작성된 지도가 있다면, 복잡한 SLAM 문제를 단순한 위치인식문제로 해결할 수 있다. 물론 사전에 정확한 지도를 작성하기 위해서는 SLAM 기술을 사용이 필요하다. 그러나 SLAM 기술을 통한 지도작성은 오프라인으로 수행할 수 있고, 다양한 알고리즘 파라미터를 조정할 수 있어 정확한 지도 획득 성공률을 높일 수 있다. 또한 사전에 작성된 지도정보를 활용한 위치인식은 실제 응용에서 더 안정적으로 실시간 위치정보를 제공할 수 있다. 이러한 방법은 그래프 기반 최적화(Graph-based optimization) 기법에 대한 수학 모델이 완성된 이후 정확한 윤곽의 지도작성이 실현 가능해짐에 따라 최근 산업현장 공간 지도작성과 자율주행기술에 많이 활용되고 있다.
또한 산업현장에서의 자율주행을 위해 작성된 공간지도의 활용성을 높이기 위하여 규격화가 선행되어야 한다. 로봇자율주행 응용 분야에 따라 제작된 공간지도에 포함된 정보가 사용처, 제공자에 따라 다르다면 주행 서비스마다 별도의 공간지도를 작성해야 하는 번거로움과 지도를 관리하는 비용이 추가로 소요된다. 이런 점을 고려하여 로봇자율주행 관련 연구자들이 모여 로봇자율주행을 위한 공간지도를 표준 규격화하여 그 활용과 확장성을 확보하였다[6].
2. 동적 환경 대상 인공표식물
대부분의 산업현장은 주변 물체의 위치가 변경되었을 경우 안정적 주행 성능 제공을 위하여 이론적으로 공간지도를 새로 작성하거나 갱신해 주어야 한다. 실제 로봇주행에서는 공간지도에 포함된 물체에 대한 정보와 현재 센서로부터 측정된 물체 정보를 비교하여 최적의 로봇 위치를 추정하게 된다. 그러므로 공간지도상에 포함된 물체정보는 최신 것으로 유지되거나 변하지 않는 정형화된 것이어야 한다.
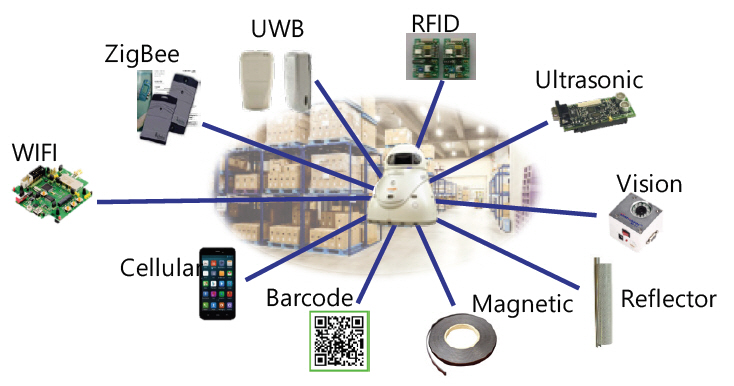
산업현장에서는 정확한 로봇 위치를 추정하기 위하여 그림 5와 같은 다양한 인공표식물을 사용한다. 이때 인공표식물은 위치인식을 위해 특별히 제작된 장비나 태그로써 어떠한 환경에서도 정확한 위치를 추정하기 위해 공간에 설치하는 것이다. 그러므로 인공표식물은 쉽게 그 특성과 위치가 변하지 않기 때문에 한 번 공간지도로 작성해 놓으면 지속해서 안정적으로 위치인식에 사용할 수 있다. 특히 마그네틱테이프, 라이다 반사판, 바코드 등이 실제 현장에서 많이 사용된다.
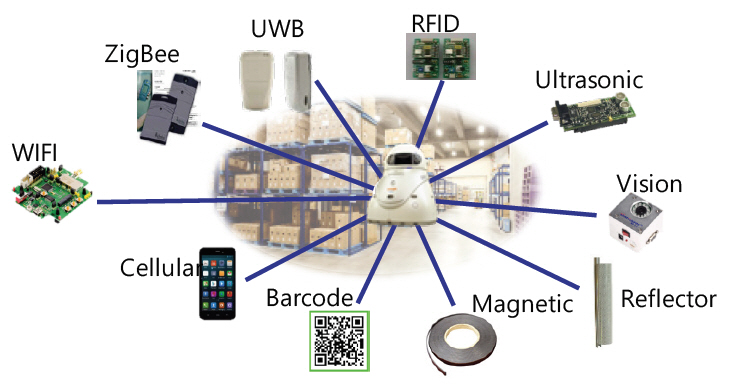
그러나 인공표식물 기반 위치인식기술이 산업현장에 폭넓게 사용되기 위해서는 비용 관련 이슈를 해결해야 한다. 무엇보다 인공표식물이 장착된 공간에서만 로봇주행이 가능하고, 인공표식 물을 구매, 설치, 관리, 유지보수하기 위한 초기 투자비용이 많이 소요되어 로봇주행 기술을 산업현장에 적용하는 데 큰 걸림돌이 되고 있다.
따라서 자연표식물만을 가지고 동적 환경에서도 안정적으로 로봇의 위치를 추정할 수 있는 혁신적인 기술이 필요하다.
3. 전역 위치인식기술
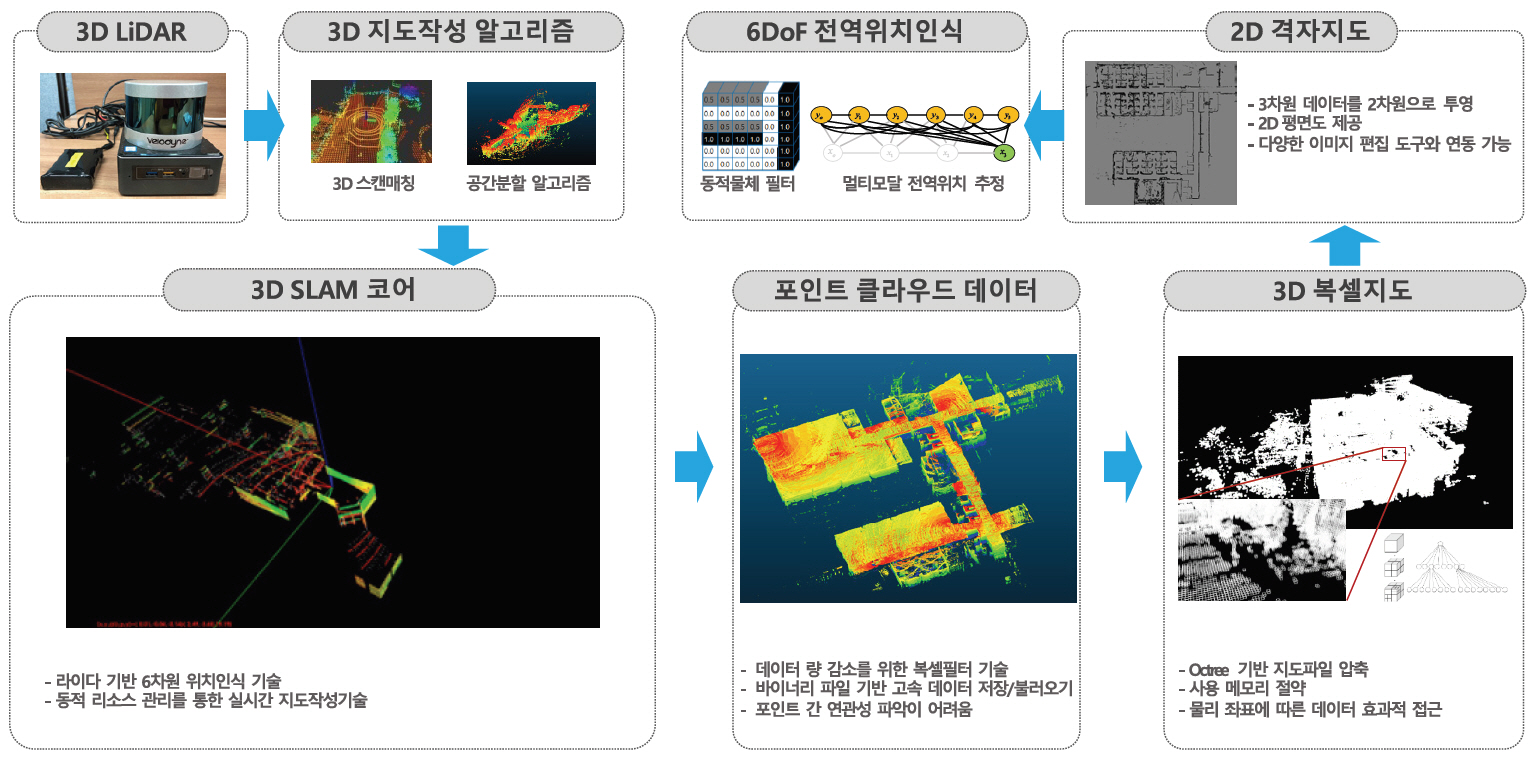
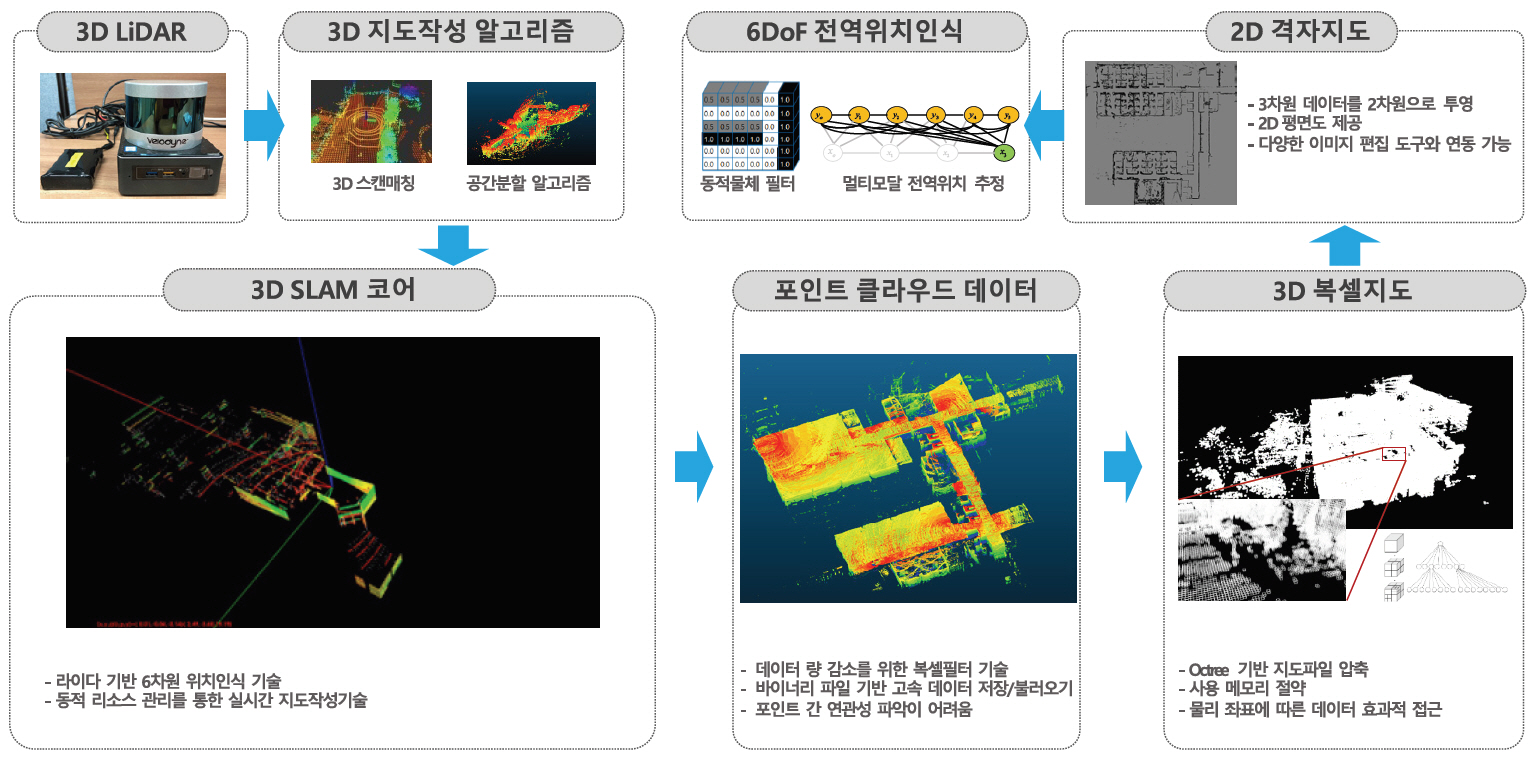
최근 인공표식물을 사용하지 않고도 3차원 라이다 스캐너를 이용하여 동적 환경을 대상으로 안정적 전역 위치를 추정할 수 있는 기술이 개발되었다. 3차원 라이다 스캐너는 로봇주행 안정성을 위하여 주변 장애물을 탐지하기 위한 작업용 로봇에 기본으로 장착되는 센서 중의 하나이다. 또한 무인자동차 시장의 등장과 광학 기술의 발전으로 점차 성능은 향상되고 저가화되고 있다[12]. 동적 환경 대상 3차원 라이다 스캐너를 이용한 전역 위치인식기술은 그림 6과 같이 구성된다. 우선 라이다로부터 획득한 3차원 포인트들을 이용하여 3D 스캔 매칭과 공간분할 기법에 따라 6자유도의 로봇 위치를 추정하게 된다. 추정된 로봇 위치를 기반으로 3차원 포인트 정보의 좌표를 변환하면 포인트 클라우드 데이터를 구성할 수 있고, 3차원 복셀(Voxel)지도를 작성할 수 있다. 복셀지도는 일정한 3차원 큐빅 영역으로 분할하고, 각 영역에 물체의 존재여부를 점유확률값으로 표현한 것이다. 그리고 복셀지도는 데이터 압축이 필요한 경우 옥트리 규격으로 제작되어 배포될 수 있다. 공간의 수직 방향의 일부 높이에 해당하는 복셀지도의 점유확률값을 분석하여 도면과 같이 동적 물체가 제거된 2D 격자지도를 생성해 낼 수 있다.
공간지도로써 생성된 3차원 포인트 클라우드 데이터와 현재 라이다로부터 획득된 3차원 포인트 정보를 멀티모달 기반 매칭을 통하여 전역 위치를 추정한다. 이때 동적 물체가 제거된 2D 격자지도를 참고 정보로 사용하여 정적 물체만이 위치인식 매칭에 사용하게 함으로써 동적 환경에서도 정확한 전역 위치 추정이 가능하다.
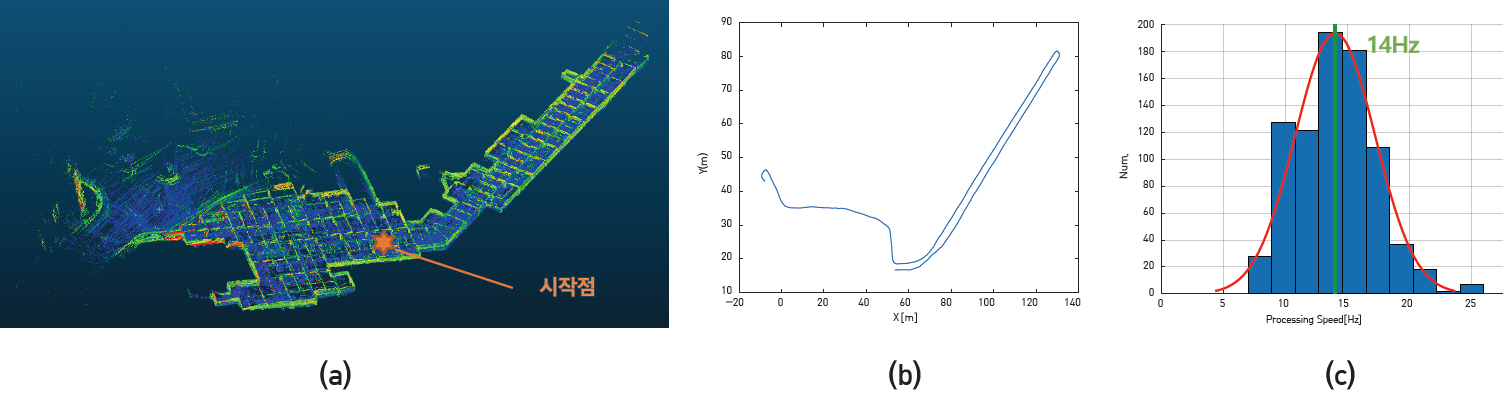
대표적인 동적 환경으로써 주차장에서 공간지도작성과 전역 위치인식을 시험한 결과는 그림 7과 같다. 실제 차량과 사람이 빈번히 이동하는 주차장에서도 정확한 공간지도를 작성할 수 있었으며, 공간지도를 생성하고 시간이 흐른 후 물체의 위치와 윤곽이 바뀌었을 때도 정확한 전역 위치를 추정할 수 있었다.
그림 7
동적 환경 대상 공간지도작성 및 전역 위치인식 결과: (a) 생성된 포인트 클라우드 데이터와 전역 위치 시작점, (b) 추정된 6자유도 전역 X-Y 이동 궤적, (c) 전역 위치인식의 실시간성 결과

본 기술을 통하여 3차원 라이다 스캔정보만을 가지고도 동적 환경에서도 정확히 6자유도의 전역 위치를 추정할 수 있었으며, 인텔 i7 3.5GHz CPU에서도 14Hz로 동작함으로써 실시간성을 검증할 수 있었다.
V. 결론
전통적인 AI 기술로서의 작업지능과는 다르게 로봇의 경우, 주위환경에 대한 물리적 상호작용이 포함되므로 필연적으로 센싱, 위치, 플랫폼 불확실성을 다루어야 한다. 이로 인하여, 작업계획의 어려움이 가중된다고 볼 수 있다.
최근의 3차원 센싱기술의 발전과 컴퓨팅 비용의 감소, 특히 ROS와 같은 오픈소스 중심의 저변 확대로 인해 작업계획-경로계획-동작계획으로 구성되는 일련의 로봇행동선택기술의 구현이 더욱 정교하고 고도화되고 있다. 그럼에도 불구하고 실세계의 다양성과 동적인 요소, 특히 비정형요소를 모델링하고 표현하는 것은 여전히 기술적으로 어려운 형편이다.
오히려 통신, 컴퓨팅, 클라우드 서비스와 연동하는 사용자 인터페이스와 로봇지능과의 협조제어가 멀지 않은 미래의 산업적 수요를 빠르게 해결하는 방안이 될 것으로 기대할 수 있다. 또한, 이러한 이종의 기술과 로봇 간의 인터페이스를 위한 표준화를 통해 특정 작업이나 시스템에 대한 종속성을 최소화하는 연구가 진행되어야 할 것이다.
약어 정리
I.-B. Jeong et al., "Task intelligence of robots: Neural model-based mechanism of through and online motion planning," IEEE Trans. Emerg. Topics Comput. Intell. vol. 1, no. 1, 2017.
ACPAQ Fully automated order picking of mixedcase pallets, https://www.swisslog.com/en-us/products-system-ssolutions/picking-palletizingorder-fulfillment/robot-based-robotics-fullyautomated/mixed-case-palletizing-acpaq.
F. Amigoni et al., "A standard for map data representation: IEEE 1873-2015 facilitates interoperability between robots," IEEE Robot. Autom. Mag. vol. 25, no. 1, 2018.
R. J. Keller, M. E. Nichols, and A. F. Lange, "Methods and apparatus for precision agriculture operations utilizing real time kinematic global positioning systems," U.S. patent 6,199,000, Trimble Navigation limited, Mar. 6, 2001.
H. Durrant-Whyte et al., "Simultaneous localization and mapping: Part I," IEEE Robot. Autom. Mag. vol. 13, no. 2, 2006, pp. 99-110.
T. Bailey et al., "Simultaneous localization and mapping (SLAM): Part II," IEEE Robot. Autom. Mag., vol. 13, no. 3, 2006, pp. 108-117.

- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.