배정숙 (Bae J.S.)
방승재 (Bahng S.J.)
이희수 (Lee H.S.)
Ⅰ. 서론
드론 형태의 무인 비행체는 1.5km 이하의 저고도에서 동작하여 유연하게 커버리지를 제어하고, 신속하게 배치되고 자율 비행이 가능한 특징으로 물류 배송, 통신 비상망 구축, 정찰 등과 같은 분야에 활발히 활용되는 추세이다.
무인 비행체의 안전한 운용을 위해서 통신 시스템은 필수적인 요소로, 5G와 무인 비행체의 융합은 5G 버티컬 산업의 한 축으로 진행되고 있다.
기존 통신 서비스 사용자에 대한 통신 품질을 유지하면서 안전한 무인 비행체 운용을 위하여 3GPP에서는 LTE에서 5G 시스템에 이르기까지 표준화를 진행하고 있다. 3GPP Rel.17까지 무인 비행체 운용을 위하여 진행된 주요 표준화 현황은 다음과 같다.
• Rel.15 “Enhanced LTE Support for Aerial Vehicles”[1]: LTE 네트워크를 기반으로 무인 비행체 서비스 능력, 다운링크 간섭 완화, 업링크 간섭 완화, 이동성 성능 및 공중 UE 식별에 대한 성능 향상 연구
• Rel.16 “Remote Identification of Unmanned Aerial Systems”[2]: 원격 식별을 위한 잠재적 요구사항, 사용 사례, UAS(Unmanned Aerial System)의 원격 식별을 기반으로 제공되는 서비스 연구
• Rel.17 “Study on supporting Unmanned Aerial Systems Connectivity, Identifcation, and Tracking”[3]: UAS를 식별하는 명령 및 제어 기능 구조와 시스템 측면 연구
• Rel.17 “Study on application layer support for Unmanned Aerial System(UAS)”[4]: UTM에 대한 애플리케이션 지원/활성화 기능, UAS와 UTM 간의 서비스 상호작용에 미칠 영향 검토
• Rel.17 “5G Enhancement for UAVs”[5,6]: 무인 비행체의 5G 연결 요구사항 충족을 위해 3GPP 네트워크에 가입한 무인 비행체의 성능 지표, 무인 비행체 통신 서비스 요구사항 도출
본고에서는 5G 기반 무인 비행체 운용을 위한 3GPP의 활동 내용 중 무선 접속 노드를 탑재한 무인비행체인 UxNB, eMBB(enhanced Mobile Broad-Band) 사용자를 위한 동시 데이터 전송, AI(Artifcial Intelligence)가 제어하는 자율형 무인 비행체, 격리된 지역의 통신을 위한 무인 비행체 활용 및 무인비행체 서비스 영역 분리 등 5G 이동통신에서의 무인 비행체 사용 사례를 소개하고, 이에 기반하여 UAS의 정의와 운용 기준, UAS 원격 식별 요구사항, UAS 사용 요구사항 및 성능 요구사항 등 무인 비행체를 위한 5G 이동통신 요구사항을 정리한다. 마지막으로 5G 이동통신 기반 무인 비행 시스템 연결, 식별 및 추적 지원과 관련하여 3GPP 무인 비행체 아키텍처, 7개 주요 문제, 주요 문제와 제안된 해결 방법 간의 매칭 및 추후 규격 작업을 위해 제안된 결과를 소개한다.
Ⅱ. 3GPP의 5G 기반 무인 비행체 운용 표준화
1. 5G 이동통신에서의 무인 비행체 사용 사례
2018년 9월에서 2019년 12월까지 진행된 “Study on Enhancement Aerial Vehicles” SI(Study Item)에서는 5G를 포함하는 3GPP 네트워크에서의 무인 비행체의 사용 사례와 예상 요구사항 등을 “Enhancement for Unmanned Aerial Vehicles” 기술 보고서[7]에 반영하였다. 해당 기술 보고서에서 정의하고 있는 무인 비행체 사용 사례 중 비상망 구축 및 정찰 등과 관련된 5가지 대표 사용 사례를 소개한다.
가. 무선 접속 노드를 탑재한 무인 비행체
재난 상황 모니터링, 국경 감시, 긴급 지원 등의 경우에 무인 비행체는 배치의 용이성, 낮은 구매 및 유지보수 비용, 기동성, 그리고 공중에 정지할 수 있는 능력 때문에 상업적으로 활용 가치가 매우 높다. 특히, 빠른 투입과 배포가 가능하고 넓은 커버리지를 제공할 수 있는 UxNB는 긴급 상황 및 트래픽 밀집 지역에서 모바일 사용자에게 임시 커버리지를 제공하는 등 다양한 시나리오에서 응용이 가능하다. 보통 100m 내외의 낮은 고도에 투입되는 UxNB는 커버리지와 신속한 배치에 있어 기본 무인 비행 시스템보다 유연하다. UxNB는 그림 1과 같이 5G 이동통신 기지국 또는 중계기의 역할을 한다. 5G 시스템은 UxNB를 지원할 수 있는 고품질의 무선 백홀을 제공할 수 있어야 하며, 무인 비행체는 동작하기 전에 5G 시스템의 승인을 받아야 한다.

나. 무인 비행체 및 eMBB 사용자를 위한 동시 데이터 전송
한정된 대역폭의 기지국은 공중의 무인 비행체와 지상의 eMBB 사용자에게 동시에 데이터 전송을 지원해야 한다. 예를 들어, 생방송 시나리오에서 100m 상공에 위치한 무인 비행체는 촬영한 사진이나 영상을 기지국으로 실시간 전송해야 하므로 높은 전송률과 넓은 대역폭이 필요하고, 동시에 기지국은 지상의 사용자에게 품질 저하 없이 eMBB 서비스를 제공해야 한다.
다. AI가 제어하는 자율형 무인 비행체
송유관 순찰, 무인 비행체 합동 작전 등 무인 비행체 시나리오에 실시간 무인 비행체 제어가 가능하도록 AI 시스템을 적용할 수 있다. 네트워크 운영자는 무인 비행체에 대한 통신 커버리지와 무인 비행체와 AI 시스템 간의 연결을 제공한다. AI 시스템은 UTM(UAS Traffic Management) 또는 3GPP 시스템 외부의 다른 타사 장치에 위치할 수 있다. AI에 의한 무인 비행체 제어 단계의 한 예가 다음과 같다.
• 무인 비행체는 고정밀도 지형 데이터, 현장 사진 및 비디오 등 실시간 정보를 수집
• 수집된 정보는 5G 네트워크를 통해 AI 시스템으로 전송
• 고정 노선의 무인 비행체 비행경로는 AI 시스템에 의해 계산되고 만들어짐
• 5G 네트워크를 통해 비행경로 및 제어 정보를 무인 비행체로 전송
AI가 제어하는 무인 비행체의 경우 상향링크 고속 전송과 하향링크 저지연 전송에 대한 무인 비행체의 요구사항을 모두 고려할 필요가 있다. 추가적으로, 5G 네트워크는 무인 비행체의 비행경로 계산과 운행에 관련된 여러 가지 판단을 지원하기 위해 고정밀 위치 정보를 AI 시스템에 제공할 필요가 있다.
라. 격리된 지역의 통신을 위한 무인 비행체 활용
그림 2와 같이 원격의 격리된 지역과 같은 일부 시나리오에서 무인 비행체는 개인 사용자 그룹 간의 통신을 위해 백홀 연결이 필요하지 않은 영역에 배치될 수 있다. 예를 들어, 유선 통신 장비가 설치되어 있지 않은 서로 떨어진 외진 두 지역에서 건설 프로젝트를 수행 중일 때, 건설 장비와 근로자 간 통신을 지원하기 위해 공중 네트워크를 활용할 수 있다. 이때 무인 비행체에 탑재된 무선 접속 네트워크는 서비스하는 사용자 간 데이터 통신을 위한 로컬 라우팅을 지원할 수 있어야 하며, 불필요한 전송을 최소화하여 무선 접속 네트워크와 서비스하는 사용자들 간의 데이터 통신 및 전력 소비를 최적화할 수 있어야 한다.

마. 무인 비행체 서비스 영역 분리
통상적으로 이동 통신용 안테나는 높은 위치의 셀 타워에 장착되고 약간 아래 방향으로 기울어져 있다. 이는 일반적으로 사람이 지상 위에 있거나 건물 안에 있기 때문이다. 무인 비행체를 위한 통신 서비스를 시작함으로써 일부 사용자는 기존 커버리지보다 높은 곳에 위치할 수 있다. 따라서 무인 비행체가 위치하는 높이까지 커버리지를 제공할 수 있도록 그림 3과 같이 안테나 방향을 조정할 필요가 있으며, 경우에 따라서는 그림 4와 같이 추가 장비를 설치할 필요도 있다. 이 경우 다양한 사용자에게 제공되는 서비스를 차별화할 필요가 있다. 무인 비행체 사용자에게 제공될 수 있는 서비스는 무인 비행체가 아닌 일반 사용자에게 제공될 수 있는 서비스와는 다르다.


3GPP 네트워크는 고도를 포함한 사용자의 네트워크 기반 위치 서비스를 지원할 수 있어야 하며, 전송된 트래픽에 대한 위치 정보와 함께 공중 서비스에 가입한 사용자에 대한 과금 정보를 수집할 수 있어야 한다.
2. 무인 비행체를 위한 5G 이동통신 요구사항
SA1의 주도하에 2019년 6월에서 2019년 12월까지 진행된 “5G Enhancement for UAVs” WI(Work Item)의 결과로 UAS를 위한 5G 이동통신 요구사항을 “Unmanned Aerial System(UAS) support in 3GPP” 기술 규격[5]에 반영하였다. 해당 기술 규격은 5G 이동통신 기반 UAS의 참조 모델, 무인 비행체와 무인 비행체 제어기 간 C2(Command and Control) 통신에 대해 소개하고, UAS의 원격 식별 요구사항, 사용자 요구사항, 성능 요구사항 등을 다음과 같이 정리한다.
가. UAS의 정의와 운용 기준
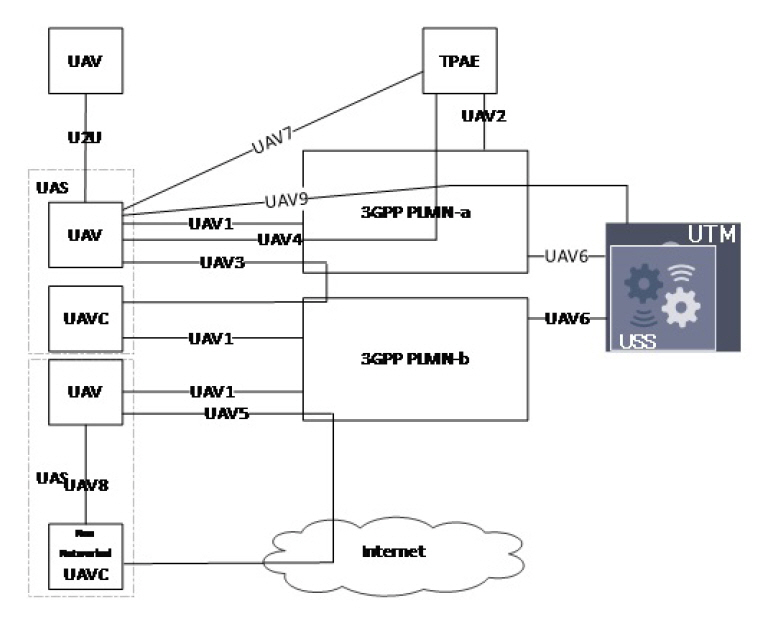
그림 5는 3GPP 기반 5G 이동통신망을 활용한 UAS 모델을 보여 준다.

UAS는 1개의 무인 비행체 제어기와 1개 이상의 무인 비행체로 구성되며, 무인 비행체는 3GPP 이동통신망 또는 비 3GPP 범위 통신망의 C2 링크상에서 무인 비행체 제어기에 의해 제어된다. UAS의 관리를 위하여 UTM 간에 3GPP 이동통신 망을 경유하여 응용 데이터 트래픽이 교환된다.
UAS 서비스 지원을 위해 3GPP 망을 이용할 때, C2 통신에 대한 QoS를 보장하여 UAS 서비스를 제공할 수 있도록 표 1과 같이 3가지 방식이 고려된다.
표 1 C2 통신 방식
나. UAS 원격 식별 요구사항
UAS의 원격 식별을 위하여 3GPP 시스템이 제공하여야 할 일반 요구사항, UTM 위주 요구사항, 보안 측면 요구사항을 표 2에 정리한다.
표 2 UAS 원격 식별 요구사항
다. UAS 사용 요구사항
UAS 사용을 위한 요구사항은 무인 비행체 서비스를 위한 망 익스포저, 무인 비행체 탑재 이동통신 단말에 대한 서비스 제한, UxNB, C2 통신 측면에서 표 3과 같이 정리된다.
표 3 UAS 사용 요구사항
라. 성능 요구사항
표 4는 3GPP 기반 5G 시스템이 무인 비행체 응용에 제공하여야 하는 성능 요구사항을 대표 서비스와 성능 지표로 정리한다.
표 4 무인 비행체 응용 서비스 성능지표
| 사용 사례 | 서비스 | 전송율 | 종단 지연 | 지상 고도 | 지역(주 4) |
|---|---|---|---|---|---|
| 1 | 8K 비디오 실시간 방송 | 100Mbps 무인 비행체 송신 | 200ms | <100m | 도심, 시골 지역 |
| 600Kbps 무인 비행체 수신 | 20ms | <100m | |||
| 2 | 레이저 매핑/HD 순찰(주 4) | 120Mbps 무인 비행체 송신(주 1) | 200ms | 30~300m | 도심, 시골 지역, 풍치 지역 |
| 300Kbps 무인 비행체 수신 | 20ms | 30~300m | |||
| 3 | 4*4K AI 정찰 | 120Mbps 무인 비행체 송신 | 20ms | <200m | 도심, 시골 지역 |
| 50Mbps 무인 비행체 수신 | 20ms | <200m | |||
| 4 | HD 비디오를 사용하는 원격 무인 비행체 제어기 | ≥25Mbps 무인 비행체 송신(주 3) | 100ms | <300m | 도심, 시골 지역 |
| 300Kbps 무인 비행체 수신 | 20ms | <300m | |||
| 5 | 실시간 비디오 | 0.06 Mbps 무인 비행체 송신(비디오 데이터 없음) | 100ms | - | 도심, 시골 지역 |
| 6 | 비디오 스트리밍 | 4Mbps(720p 비디오 데이터) 9Mbps(1080p 비디오 데이터) 무인 비행체 송신 | 100ms | - | 도심, 시골 지역 |
| 7 | 주기적인 정지 영상 | 1Mbps 무인 비행체 송신 | 1s | <120m | 도심, 시골 지역 |
3. 5G 이동통신 기반 무인 비행 시스템 연결, 식별 및 추적 지원
2018년 12월에서 2020년 12월까지 진행된 “Study on supporting Unmanned Aerial Systems Connectivity, Identification, and Tracking” SI의 결과로 “Study on supporting Unmanned Aerial Systems(UAS) connectivity, Identification and tracking(Release 17)” 기술 보고서[3]가 작성되었다. 이 기술 보고서에서 다룬 무인 비행 시스템의 연결, 식별 및 추적을 위한 3GPP 무인 비행체 아키텍처 및 요구사항, 해결해야 할 7가지 주요 문제, 제안된 27개의 해결 방법 및 향후 규격 단계에서의 고려 사항에 대하여 다음과 같이 정리하였다.
가. 3GPP 무인 비행체 아키텍처
그림 6은 3GPP 무인 비행체 아키텍처를 보여 주고 있고 표 5와 같은 참조점이 고려된다.

표 5 3GPP 무인 비행체 아키텍처 참조점
무인 비행 시스템 관리를 위한 3GPP 아키텍처 요구사항은 다음과 같다.
• 4G 시스템과 5G 시스템에 적용할 수 있어야 한다.
• 3GPP 시스템은 UTM이 무인 비행체와 무인 비행체 제어기를 연계시키고 3GPP 네트워크 무인 비행체 제어기와 비 3GPP 네트워크 무인 비행체 제어기 모두에 대해 식별할 수 있도록 해야 한다.
• 3GPP 네트워크는 무인 비행체의 서빙 PLMN (Public Land Mobile Network)과 해당 무인 비행체 제어기의 서빙 PLMN이 다를 수 있도록 해야 한다.
• 해결 방법은 5G 시스템과 4G 시스템 프로토콜에 미치는 영향을 최소화해야 한다.
나. 주요 문제
3GPP 시스템에서 무인 비행 시스템 관리를 위하여 해결해야 할 주요 문제는 표 6과 같이 7개로 정리된다.
표 6 주요 문제
| 번호 | 주요 문제 |
|---|---|
| 1 | 무인 비행체 식별 |
| 2 | UTM에 의한 무인 비행체 인가 |
| 3 | 무인 비행체 제어기 식별 및 인증/인가 |
| 4 | 무인 비행체와 무인 비행체 제어기 추적 |
| 5 | 무인 비행체 인가 취소 및 (재)인가 실패 |
| 6 | 무인 비행체 제어기와 무인 비행체 연계 |
| 7 | 무인 비행체를 위한 사용자 평면 연결 |
다. 주요 문제와 제안된 해결 방법 간 매핑
표 7에는 제안된 해결 방법을 소개하고 각 해결 방법이 어떤 주요 문제를 다루는지에 대한 매핑 관계를 보여 준다.
표 7 주요 문제와 제안된 해결 방법 간 매핑
라. 추후 규격 작업을 위한 제안 사항
이 기술 보고서에서는 제안된 해결 방법과 관련하여 추후 규격 작업을 위해 다음 사항을 제안하였다.
• 새로운 무인 비행 시스템 네트워크 기능을 표준화하는 데 해결 방법 5의 UFES(UAV Flight Enablement Subsystem)와 해결 방법 25의 UAVF (UAV Function)의 기능 정의를 기반으로 한다.
• 새로운 무인 비행 시스템 네트워크 기능은 무인 비행체 인증/인가, 무인 비행체 비행 인가, 무인 비행체-무인 비행체 제어기 페어링 인가 및 관련 취소, 위치 보고 및 C2 통신을 위한 QoS/트래픽 필터링 제어를 위해 기존 NEF(Network Exposure Function)/SCEF(Service Capabilities Exposure Function) 노출 서비스를 사용하며 개선 사항은 표준 작업 중에 정의될 수 있다.
• 무인 비행체와 3GPP 시스템이 USS/UTM과 인터페이스를 위한 제어 평면 연결 방법을 해결 방법 5와 23을 기반으로 표준화를 진행하였다.
Ⅲ. 결론
본고에서는 무인 항공기 운용을 위하여 4G에서 5G에 이르기까지 3GPP에서 진행된 주요 표준화 내용을 설명하였고, 5G 기반 이동통신 시스템에서 무인 비행체 운용을 위한 사용사례를 소개하였다. 이에 기반하여 UAS 및 운용 기준을 정의하였고, UAS 원격 식별 요구사항, UAS 사용 및 성능 요구사항 등 무인 비행체를 위한 5G 이동통신 요구 사항을 정리하였다. 마지막으로 5G 이동 통신 기반 무인 비행 시스템 연결, 식별 및 추적 지원과 관련하여 3GPP 무인 비행체 아키텍처, 해결해야 할 7가지 주요 문제, 주요 문제와 제안된 해결 방법 간의 매칭 및 추후 규격 작업을 위해 제안된 결과에 대하여 정리하였다.
현재 무인 비행체의 운용을 위해 가장 중요하게 고려되는 분야는 5G 시스템을 경유한 UTM과의 연계로, SA에서 정의된 구조를 바탕으로 이를 지원하기 위한 무선 접속망에서의 표준화가 진행될 전망이다.
용어해설
C2 무인 비행체 제어기 또는 UTM에서 무인 항공기로 작동을 위한 명령과 제어 정보가 포함된 메시지를 전송하는 사용자 평면 링크
UFES 3GPP 시스템을 USS와 인터페이스하고 UAV 원격 식별 및 추적을 수행할 때 해당 USS를 지원하는 3GPP 서브 시스템
USS 공역을 안전하고 효율적으로 사용할 수 있도록 지원하고 항공 관리국과 드론 운영자 간의 중간자 역할을 하며 공역 모니터링, 안전 임무 및 운항 데이터 관리를 수행함
UTM 무인 비행 시스템의 교통 관리를 위한 기능 및 서비스 수행
UxNB 무인 비행체에 탑재된 무선 액세스 노드. 사용자에게 이동통신 서비스를 제공할 수 있으며 무선 백홀을 통해 코어망과 연결되어 있음
약어 정리
AI
Artifcial Intelligence
C2
Command and Control
eMBB
enhanced Mobile BroadBand
MNO
Mobile Network Operator
NAS
Non-Access Stratum
NEF
Network Exposure Function
PLMN
Public Land Mobile Network
RID
Remote Identifcation
SCEF
Service Capabilities Exposure Function
UAS
Unmanned Aerial System
UAV
Unmanned Aerial Vehicle
UAVC
Unmanned Aerial Vehicle Controller
UAVF
UAV Function
UFES
UAV Flight Enablement Subsystem
USS
UAS Service Supplier
UTM
Unmanned Aerial System Traffic Management
참고문헌
그림 1
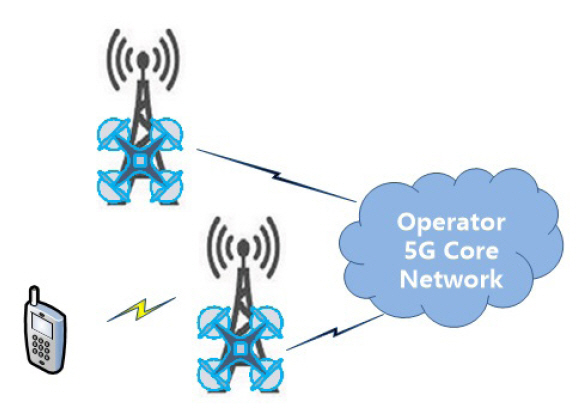
그림 2
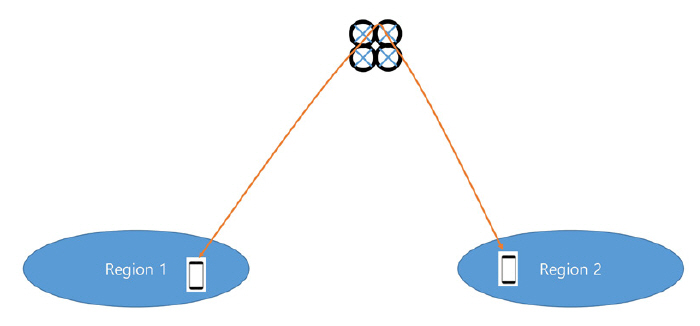
그림 3
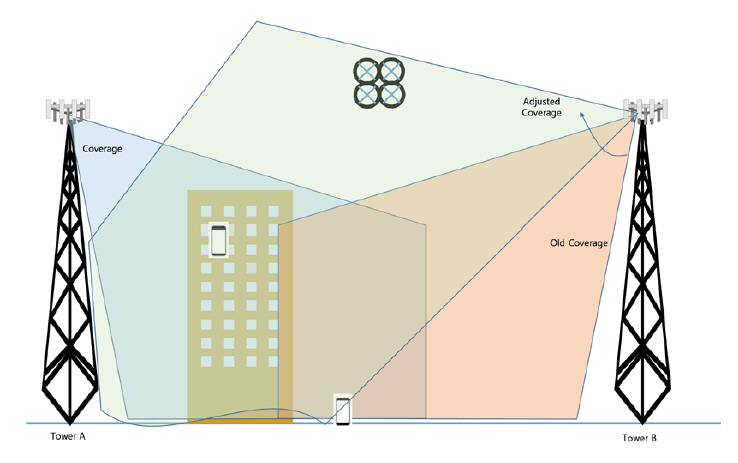
그림 4
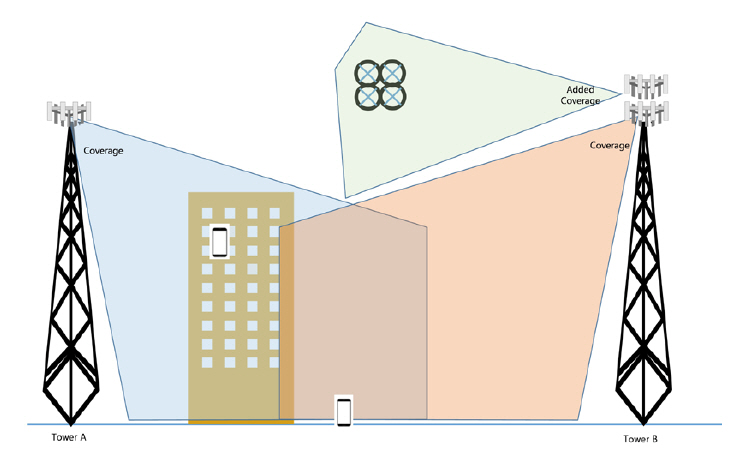
그림 5
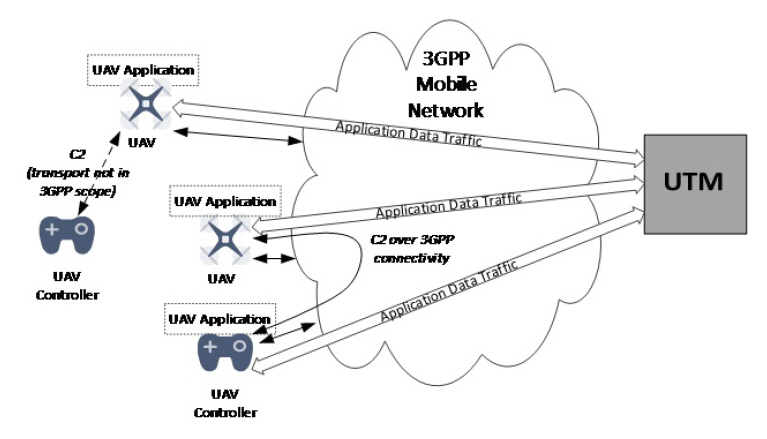
그림 6