불법 드론 대응을 위한 저고도 드론 탐지 기술 동향
Technical Trends on Low-Altitude Drone Detection Technology for Countering Illegal Drones
- 저자
-
이인재자율비행연구실 ninja@etri.re.kr 최상혁자율비행연구실 shchoi0226@etri.re.kr 주인원자율비행연구실 inone@etri.re.kr 전진우자율비행연구실 jjw0514@etri.re.kr 차지훈자율비행연구실 jihun@etri.re.kr 안재영자율비행연구실 jyahn@etri.re.kr
- 권호
- 37권 1호 (통권 194)
- 논문구분
- 인공지능 서비스 및 인프라 기술
- 페이지
- 10-20
- 발행일자
- 2022.02.01
- DOI
- 10.22648/ETRI.2022.J.370102
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- A drone without attaching guns or bombs can be a dangerous weapon, since its motor speed is greater than 3000 rpm, which is similar to that of a mower powered by a LiPo battery. The anti-drone system is the only means of detecting and neutralizing drone attacks. Many defense companies around the world provide solutions using various types of equipment (for example, radar, cameras, jamming guns, and net guns). ETRI has also developed a Low-Altitude Drone Detection (LADD) system consisting of Ku-band radar and an Electro-Optical/Infra-Red (EO/IR) camera. In this paper, we summarize recent technical advances in anti-drone systems around the world and introduce the features and describe the performance of the LADD system.
Share
Ⅰ. 서론
최근 드론 산업이 급격히 확산됨에 따라 무단비행, 테러, 사생활 침해 등 드론범죄가 지속적으로 증가하고 있다. 우리나라는 인구밀집지역을 비롯하여 원전, 공항, 군부대, 청와대 등 국가중요시설 인근을 비행금지구역으로 지정하였으나, 비행금지구역에 대한 드론의 불법 비행 사례는 계속 증가하고 있다. 일례로 2020년 9월 불법 드론 2대가 인천국제공항에서 무단비행하여 항공기 5대가 회항하는 사태가 발생했다. 그리고 지난 5년간 원전 주변에서 적발한 불법 비행 드론 건수는 총 26건이며, 그중 9건은 조종자를 발견하지 못하였다. 또한 드론에 장착된 고성능 카메라를 이용해 광범위한 정보 수집이 가능함에도 불구하고 드론으로 인한 개인정보의 무분별한 유출을 막을 제도적 장치는 미비하다.
최근 드론을 이용한 테러가 급증하고 있는데, 2021년 11월 이라크 총리가 총리 관저에서 폭발물을 실은 드론 3대의 공격을 받아 최소 7명의 경호원이 부상을 당했다. 국내에는 아직까지 이러한 드론 테러 또는 이에 준하는 드론범죄가 발생하지 않았으나 세계적 추세에 비추어 보았을 때 더 이상 안전지대라고 할 수 없다. 따라서 불법 드론 대응을 위한 안티드론 기술 개발에 힘써야 할 것이며, 이에 경찰청에서는 불법 드론을 탐지·추적·식별할 수 있는 시스템 개발을 진행하였다.
세계시장 조사 기관인 Grand View Research 社에 따르면 글로벌 불법 드론 대응 시장은 2019년부터 2026년까지 7년간 급격히 성장하여(CAGR 29.9~37.2%) 2026년에는 약 45억 USD에 이를 것으로 전망되며[1], 현재 시장 성장기인 점을 고려하면 안티드론 기술 개발 시 세계시장 진출도 가능할 것으로 예상된다.
본고에서는 국내외에서 수행되고 있는 불법 드론 탐지 및 대응 기술 동향을 살펴보고, 마지막으로 한국전자통신연구원(ETRI)에서 개발한 저고도 드론 탐지 시스템에 대해 소개한다.
Ⅱ. 기술 동향
1. 안티드론 기술 소개
안티드론 기술은 위협 가능성이 있는 불법 드론을 탐지, 추적 및 식별하고, 위험 행위 전에 불법 드론을 무력화시키는 기술로 크게 탐지, 판단, 무력화 기술로 나눌 수 있다. 효율적인 안티드론 시스템을 개발하기 위해서는 사전에 다양한 환경 및 상황을 분석하고 그에 적합한 탐지, 판단, 무력화 기술을 지능적으로 결합시켜 유기적으로 동작하도록 해야 한다[2].
가. 드론 탐지 기술
드론은 일반 항공기보다 압도적으로 작은 크기와 낮은 RCS(Radar Cross Section)를 가지며, 고정익기 대비 자유롭게 비행할 수 있다는 특징 때문에 드론 탐지, 추적 기술의 난이도는 상당히 높다. 드론 탐지 기술은 전파, 레이다, 영상, 음향 기반의 다양한 센서들을 활용하여 수행할 수 있으며, 탐지 기술별로 거리 제한, 음영지역, 환경에 의한 성능 저하 등의 단점이 존재하므로 이를 보완하기 위해 다중 센서를 활용해야 한다. 일례로 원거리에서 레이다로 비행체를 먼저 탐지하고, 비행체가 유효 거리 안에 접근하면 EO/IR(Electro-Optics/InfraRed) 카메라를 사용해 드론을 추적하고 식별할 수 있다. 드론 탐지 센서별 장단점은 표 1과 같다[2].
표 1 탐지 센서별 장단점
나. 불법 드론 판단 기술
판단 기술은 탐지 단계와 무력화 단계를 이어주는 역할을 하며 지시·제어 기술을 포함한다. 현재 대부분의 안티드론 기술은 탐지와 무력화 기술 위주로 개발되고 있으며, 판단 기술 개발은 미흡한 편으로 기술 개발에 필요한 요구사항은 다음과 같다.
드론 탐지 기술은 센서별로 장단점이 있어 다양한 탐지 정보들을 융합해 판단할 수 있는 지능형 센서 융합 기술이 필요하다. 판단 단계에서는 탐지 장비들로부터 획득한 정보를 융합하여 불법 드론 여부를 판단하고 불법 드론의 이동 경로 등을 고려하여 최적화된 무력화 대응 방안을 도출하기 위해 탐지 장비와 무력화 장비의 위치, 성능 등의 정보가 먼저 제공되어야 하며, 탐지 및 무력화 장비가 분산 배치된 경우 저지연 네트워크도 필요하다.
다. 드론 무력화 기술
드론을 무력화시키기 위해서는 경고, 유도, 포획, 교란/마비, 파괴 등 다양한 방법이 있다. 이 중유도를 통한 무력화 방법이 가장 안전하고 효과적인 방법이지만 기술적 난제가 존재한다. 불법 드론이 다양한 센서를 탑재한 지능형 드론이라면 정보 입력 수단인 센서를 마비시켜 무력화하는 방법도 있다. 무력화 방법은 유도, 포획, 파괴 등으로 구분할 수 있으며, 각 무력화 방법별 장단점은 표 2와 같다[2].
표 2 무력화 방법별 장단점
2. 안티드론 연구개발 동향
가. 유럽의 ALADDIN 프로젝트
ALADDIN(Advanced hoListic Adverse Drone Detection, Identification Neutralization) 프로젝트는 EU 의 연구혁신 기금 프로그램인 Horizon 2020의 지원을 받아 2019년부터 2020년까지 진행된 것으로 유럽 9개국이 참여하여 불법 드론 대응 시스템을 위한 설계, 개발 및 평가 시스템을 구축하였다[3]. 탐지를 위해 레이다 센서, 광학 및 열상 파노라마 센서, 음향 센서 등을 이용하였으며, 무력화 방법으로 재머 등 물리적 방법 및 해킹에 대한 연구를 수행하였다. 모든 센서로부터 얻은 데이터는 딥러닝 기술을 적용해 융합시킴으로써 넓은 범위 내에서 탐지 및 분류의 정확도 달성을 목표로 하였다.
나. 미국의 DARPA 프로젝트
Identfication미국의 DARPA(Defense Advanced Research Projects Agency)에서는 안티드론 기술과 관련해서 다양한 프로그램을 진행하고 있다. 먼저 Aerial Dragnet 프로그램은 다양한 센서가 탑재된 드론을 활용하여 도시 지형에서 공중감시망을 구축함으로써 소형 드론을 탐지, 분류 및 추적하는 것을 목표로 한다[4]. 180km2의 광범위한 도심 영역에 대해 1,000피트(304.8m) 미만에서 비행하는 모든 비행체를 지속적으로 감시하는 기능을 제공한다. 주로 레이다, 광학, 음향 센서를 이용한 불법 드론 탐지 기술을 개발하고 있다.
DARPA의 MFP(Mobile Force Protection) 프로그램은 폭발성 방어 무기 사용을 피하고 부수적 피해를 완화해야 하는 인구 밀집 지역에 사용할 수 있는 무인 항공기 요격 시스템을 개발하고 있다[5]. X 밴드 레이다를 사용해 표적을 탐지하고 자동화된 의사 결정 엔진을 통해 특정 요격체에 회전익 또는 고정익 요격체를 발사해 대응한다. DARPA는 현재 MFP 프로그램에서 개발된 기술을 기반으로 군과 협력하고 있다.
다. 중국의 안티드론 시스템
중국의 Zhejiang University에서는 다중 센서를 이용해 불법 드론의 정확한 탐지, 추적 및 대응을 수행할 수 있는 다중 감시 기술 기반 융합형 안티드론 시스템(ADS-ZJU)을 개발하였다[6]. 시스템은 다중 센서를 이용한 탐지 유니트, 중앙 처리 유니트, 자동 재밍 유니트, 실시간 디스플레이 유니트 등 4개로 구성된다. 탐지 유니트는 센서별 장점을 고려하여 광학 센서, 음향 센서 및 RF 센서를 이용해 통합 운용한다. 중앙 처리 유니트는 각 센서로부터 추출된 특징과 기저장된 데이터베이스의 대조를 통해 드론 여부를 탐지한다. 탐지가 성공하면 위치 결정 알고리즘을 구동하여 자동 재밍 유니트를 통해 해당 표적에 대해 RF 재밍 신호를 방사한다. 탐지부터 위치 결정까지의 전 과정을 실시간 디스플레이 유니트를 통해 전시한다.
3. 안티드론 상용장비 동향
가. 영국의 AUDS
AUDS(Anti-UAV Defence System)는 원격에서 UAV(Unmanned Aerial Vehicle)를 탐지, 추적하고 UAV의 비행을 무력화시킬 수 있는 시스템으로 레이다(Blighter의 A400 Series Air Security Radar), EO/IR 광학 장비(Chess Dynamics의 Hawkeye DS와 EO Video Tracker), 전파 교란기(Enterprise Control System의 Directional RF Inhibitor)로 구성된다[7]. 레이다는 PESA(Passive Electronic Scan Antenna) 및 FMCW (Frequency Modulated Continuous Wave) 기술을 사용하는 모듈식 비 회전 전자 스캔 시스템으로 방위 각은 180° 또는 360°, 거리는 최대 3.6km 범위 내에서 소형 UAV를 탐지할 수 있다. EO/IR 광학 장비는 중파(MWIR) 열화상 카메라와 고화질(HD) 카메라로 구성되었다. 또한 전파 교란기는 SDR(Software-Defined Radio) 기술을 사용하여 UAV 대응에 가장 적합한 억제 파형을 제공한다. 영월, 보성, 고흥, 보은 등 드론비행시험장에 AUDS 안티드론 시스템의 Blighter A400 레이다가 도입되어 사용 중이다.
나. 미국의 BlackSage UASX
BlackSage Technology의 UASX는 소형 감시 레이다, 영상 센서 및 RF 재밍을 사용하여 UAV를 탐지, 추적, 식별 및 무력화하는 시스템으로 주야 동작이 가능하며, 500m~7km까지 단거리/중거리/장거리 탐지 범위별로 제품군을 분류하여 다양한 형태로 제공하고 있다[8]. 액티브 드론 탐지 레이다는 UAV의 위치 탐지에 사용되며 영상 센서는 드론 식별을 위해 사용되고 RF 드론 재머는 GNSS 위성 및 운영자와의 통신을 비활성화시켜 UAV에 대응하기 위해 사용한다. UASX 안티드론 시스템은 인천공항에 일부 도입되어 사용 중이다.
다. 이스라엘의 DroneDome
RAFAEL사의 DroneDome은 드론 탐지, 추적, 식별 및 무력화를 포함한 포괄적인 안티드론 솔루션을 제공하고 있다[9]. 레이다, EO 센서, RF 스캐너 등의 장비로 구성되어 있는데 360° 레이다와 RF 센서를 사용하여 드론을 탐지하고 EO 센서를 이용 하여 드론의 위치 및 드론 식별 기능을 제공하며, 모듈식 시스템으로 사용자의 요구에 따라 고정형 또는 이동형으로 구성이 가능하다.
라. 중국의 AeroScope
전 세계 상용 드론의 75% 정도를 점유하고 있는 중국 DJI사의 AeroScope는 RF 스캐너의 일종으로 자사의 드론에 대한 실시간 모니터링 기능을 제공하는데, DJI 드론과 조종기 사이의 통신 데이터를 분석하여 드론의 모델, 위치, 속도 및 지상 컨트롤러 위치를 포함한 실시간 식별 정보를 제공한다[10]. AeroScope는 운용 시 자사의 서버에 접속하여 운용되는 방식으로 국내에서 비행하는 드론의 다양한 정보를 국외로 보낼 수 있다는 우려가 있으나, DJI사는 웹 API를 제공하여 이를 피할 수 있는 방법도 제공하고 있다. 미국의 911 Security는 API를 통해 AeroScope의 데이터를 통합하고 모든 데이터를 미국 정부에서 승인한 서버에 저장하고 있다.
Ⅲ. 저고도 드론 탐지 시스템(LADD)
1. 시스템 구성
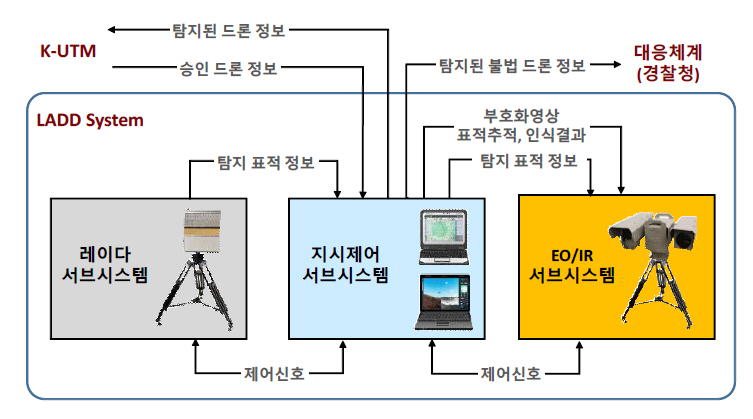
한국전자통신연구원에서는 경찰청의 지원을 받아 2017년부터 2021년까지 “무인비행장치의 불법 비행 감지를 위한 EO/IR 연동 레이다 개발 및 실증 시험” 과제를 수행하였다. 본 과제를 통해 개발한 LADD(Low Altitude Drone Detection) 시스템은 레이다 서브시스템, EO/IR 서브시스템과 이를 통제 운용하는 지시제어 서브시스템으로 구성된다.
레이다 서브시스템은 거리 200m~3km에 존재 하는 RCS 0.01m2 이하의 표적을 90% 이상의 확률로 탐지 가능하다. EO/IR 서브시스템은 레이다 서브시스템에 의해 1차 탐지된 표적 정보를 기반으로 3km 이내에서 표적을 탐지 및 추적하고, 표적이 2km 이내로 가까워지면 드론 여부를 판별한다. 각 서브시스템의 구성과 기능은 각 절에서 상세히 기술한다.
2. 레이다 서브시스템
드론은 일반 전투기와 미사일에 비하여 낮은 고도(200m 미만)에서 느린 속도(30m/s 미만)로 비행 가능하며 반사 신호(RCS 0.01m2미만)도 매우 약하기 때문에 드론을 탐지하는 것은 초저속으로 저공비행하는 스텔스기를 탐지하는 것과 같다. 이를 극복하기 위해 본 레이다 서브시스템은 Ku 대역을 선택하였는데, Ku 대역의 파장은 통상적으로 군용 AESA 레이다에서 많이 사용하는 X 대역보다 최대 2배가 짧기 때문에 드론의 도플러 주파수를 X 대역보다 높게 체감할 수 있고, 이를 이용해 저고도 클러터와 드론이 가지는 도플러 주파수를 구분하는 데 유리하다. AESA 레이다의 핵심 구성품인 Ku 대역 SSPA, LNA, phase shifter, attenuator는 한국전자통신연구원에서 직접 설계하여 국산화하였고, FMCW 방식을 채택하여 SSPA 하나당 송출하는 전력의 세기도 낮추었다.
가. 구성 및 형상
레이다 서브시스템은 그림 1과 같이 크게 능동 하이브리드 빔 조향 방식의 위상배열 안테나 유니트, FMCW 송신신호 생성과 수신신호 비트주파수 변환 등을 담당하는 송수신 유니트, 레이다 제어 및 신호처리를 담당하는 레이다 제어 및 신호처리 유니트, 레이다 서브시스템의 구성유니트를 장착하고 외부로부터 보호하는 기능을 담당하는 레이다 하우징 유니트로 구성된다.
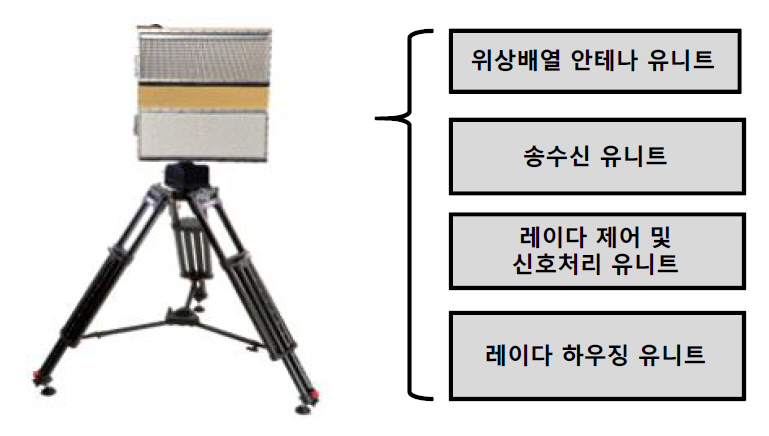
레이다는 주요 인사의 경호를 목적으로 개발되어 경호 대상의 위치가 변할 때마다 쉽게 운반 설치가 가능한 무게(30kg 미만)와 크기(56×67×16cm)로 제작되었다.
나. 기능 및 성능
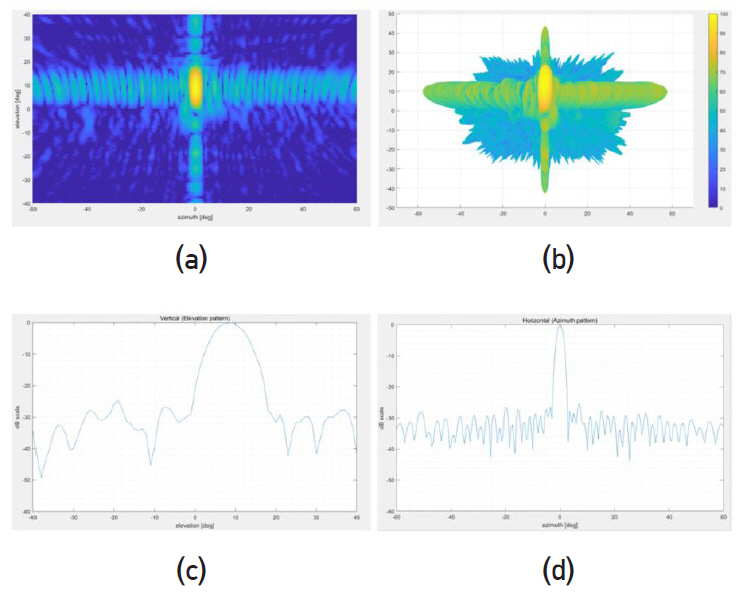
레이다의 위상배열 안테나는 고각 방향으로 주파수 스캔 방식, 방위각 방향으로 전자식 스캔 방식을 사용한다. 따라서 빔을 조향하는 phase shifter 와 attenuator는 한 줄만 부착되며, 이러한 방식의 위상배열 안테나 채택으로 레이다 생산 원가의 50% 이상을 차지하는 송수신 RF 코어칩(SSPA, LNA, phase shifter, attenuator) 사용 개수를 최소화하여 레이다 비용을 낮추었다. 레이다의 탐지 영역은 고각 20°, 방위각은 100°이다. 저고도에서 운용하는 레이다의 경우 지면으로부터 반사된 강력한 신호들이 수신안테나로 유입되기 때문에 이를 억압 시키기 위하여 빔 성형 시 고각 방향으로는 송수신빔 모두 부엽레벨을 주빔 대비 20dBc 이상 낮아지도록 하였고, 방위각 방향으로는 수신빔만 25dBc 이상 낮아지도록 테이퍼링을 적용하였다. 그림 2와 같이 고각 빔폭은 6° 이내이고 방위각의 빔폭은 1.5° 이내이며, 이는 레이다의 표적 각도 추정 정확도와 일치한다.
위상배열 안테나 제작 후 빔 형상 및 빔 방향을 제어하는 빔제어 테이블 생성을 위해 근접전계 시험을 수행하였다. 그리고 측정한 데이터를 활용해 신속하게 채널의 경로를 보정할 수 있는 SW를 개발하여 레이다 양산 시 소요되는 빔제어 테이블 생성을 위한 근접전계 시험 소요시간을 2시간 이내로 줄였다. 그림 3은 근접전계 시험을 통한 위상배열 안테나의 보정 결과로, 수신 안테나 패턴을 위한 보정 값이 반영되었다.

실표적(DJI 팬텀4, 인스파이어2, 매빅 에어2 등)을 대상으로 인천 경인항, 김해공항, 공주보, 대전 드론 공원, 남태령 경찰특공대 훈련장, 한화시스템 용인연구소, 한국전자통신연구원 등 다양한 장소에서 시험을 수행하였다. 레이다의 설치 위치가 지면보다 높을수록 지면으로부터 반사되어 돌아오는 클러터 신호의 세기가 약해지기 때문에 레이다 탐지 성능이 향상되는 양상을 확인할 수 있었다. 실표적 시험 결과는 그림 4와 같으며 매빅 에어2가 3km 이상의 거리에서 성공적으로 탐지되었다.
3. EO/IR 서브시스템
EO/IR 서브시스템은 최대 3km의 원거리 표적에 대한 탐지, 추적이 가능하고, 2km 이내의 비행 표적에 대해서는 드론 여부를 판별할 수 있다. 영상 기준에서는 보다 정확한 표적 탐지를 위해 최대 줌을 이용하여 가능한 한 많은 PoT(Pixel on Target)를 확보하는 것이 유리하지만 영상 센서 대비 레이다의 낮은 분해능으로 인해 너무 높은 배율의 줌을 사용하면 레이다 한 개 빔의 넓이도 커버하지 못하는 좁은 FoV(Field of View)로 레이다와 EO/IR 서브 시스템 간의 연동이 어려워진다. 따라서 레이다와 EO/IR의 연동을 통한 효율적인 드론 탐지를 위해 레이다 성능을 고려하여 운용방안을 설계해야 한다. 또한 드론의 속도를 고려하여 드론의 움직임을 커버할 수 있도록 FoV를 설정해야 한다.
가. 구성 및 형상
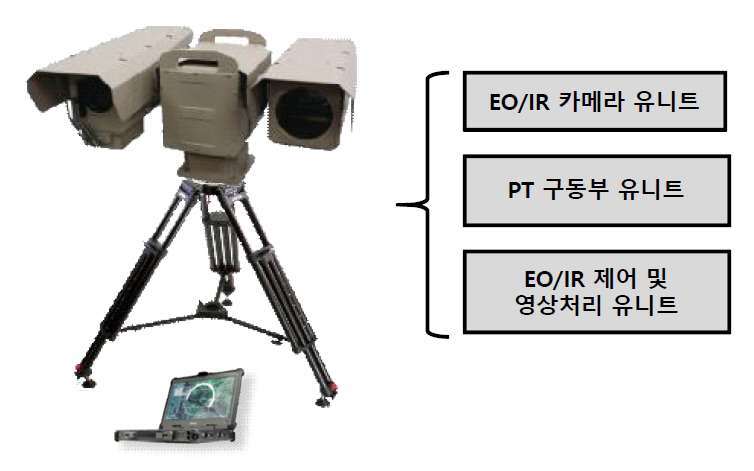
EO/IR 서브시스템은 레이다 서브시스템이 확보한 표적 정보를 전달받아 EO/IR 카메라를 이용해 표적 영상을 획득하고, 이를 기반으로 드론 탐지, 추적, 인식을 수행하며 그 결과를 지시제어 서브 시스템으로 전달하여 운용자에게 전시할 수 있다. EO/IR 서브시스템은 그림 5와 같이 크게 Zoom 기능이 탑재된 HD급 EO 카메라와 SD급 IR 카메라 조합으로 구성된 EO/IR 카메라 유니트, EO/IR 카메라 유니트의 팬(360° 무한회전) 및 틸트(±90°) 구동을 담당하는 PT 구동부 유니트, 외부 인터페이스 및 다른 두 유니트에 대한 제어 및 영상처리를 담당하는 EO/IR 제어 및 영상처리 유니트로 구성된다.
나. 기능 및 성능
EO/IR 서브시스템은 카메라 파라미터 설정, PTZF(Pan/Tilt/Zoom/Focus) 제어, 획득 영상 부호화 및 전송, 탐지, 추적, 인식, 표적 정보 전달 등 다양한 기능을 수행한다. 탐지 및 인식의 경우 딥러닝 알고리즘을 적용하였다. 이를 위해 먼저 실영상 위주로 EO/IR 기반 탐지용 드론 DB를 제작하였는데, 드론 위치를 담은 GT(Ground Truth) 정보와 함께 EO의 경우 4만 개 이상, IR의 경우 2천 개이상의 드론 DB를 제작하였다. 인식용 DB도 드론, 새, 비행기를 대상으로 2만 장 이상의 DB를 제작하였다.
드론 탐지의 경우 YOLO 기반 탐지 알고리즘에 모델 압축 기술을 적용하여 경량 딥러닝 알고리즘을 개발하였다. 기존 신경망이 가지는 가중치 중 실제 추론을 위해 필요한 값 위주로 기여도가 작은 값들은 없애서 네트워크의 모델 크기를 줄이고, weight pruning 이후 재학습을 통해 기존 weight를 강화하는 방식으로 pruning의 단점을 극복하고자 하였다. 또한 원거리 표적의 경우 레이다와의 연동을 고려한 FoV에서는 표적의 크기가 너무 작아서 입력영상의 크기를 딥러닝 모델의 입력 크기로 줄일 경우 표적 검출이 불가능하다. 따라서 입력영상 축소로 인한 손실을 막기 위해 입력영상을 일정한 크기로 분할한 후 분할 영역에 대해서 병렬처리가 가능하도록 OpenMP를 적용하여 표적을 실시간 탐지할 수 있는 알고리즘을 개발하였고(10fps 이상), 결과는 그림 6과 같다.
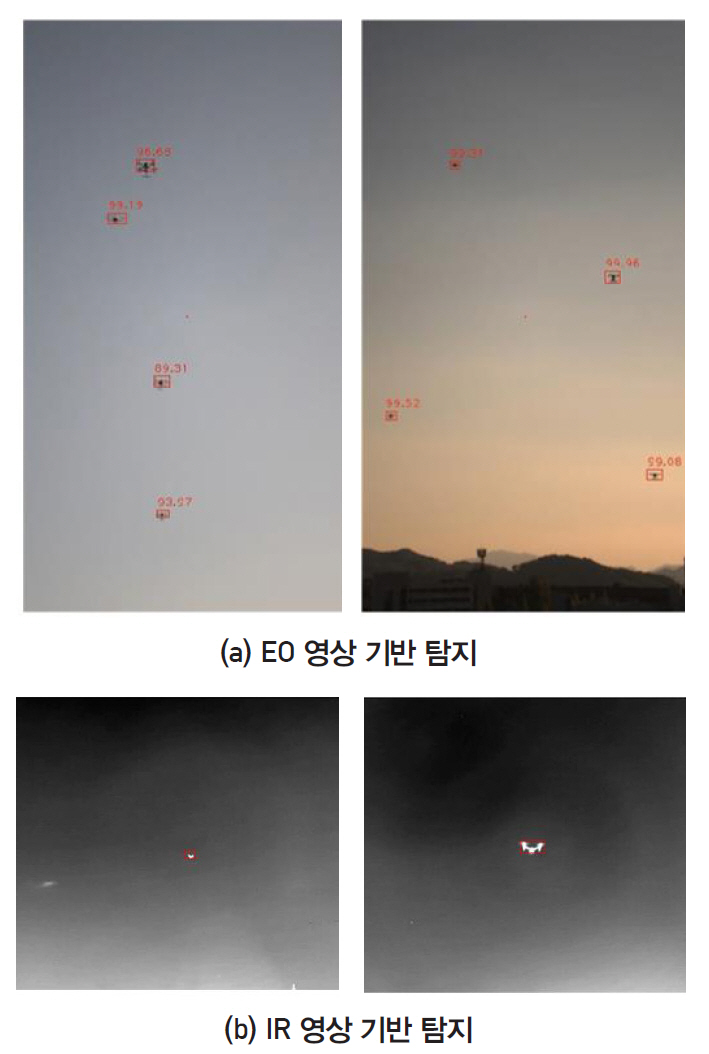
드론 추적을 위해서는 탐지 결과를 기반으로 OFKT(Optical Flow and Kalman filter Tracking)를 적용하여 optical flow를 이용한 추적 결과와 kalman filter를 이용한 예측 결과를 이용해 표적을 추적하면서 PT를 이동시켜 중심 영역에 위치시켰다. 중심 영역에 위치시킨 후에는 KCF(Kernelized Correlation Filter) 알고리즘을 적용하여 객체 모델을 생성하였고, search window 내에서 객체 모델과 가장 유사한 이미지를 추적하였다. 이를 통해 25fps 이상의 빠른 속도로 추적이 가능하였고 복잡한 배경에서도 일정 수준 추적이 가능하였으며, 결과는 그림 7과 같다.

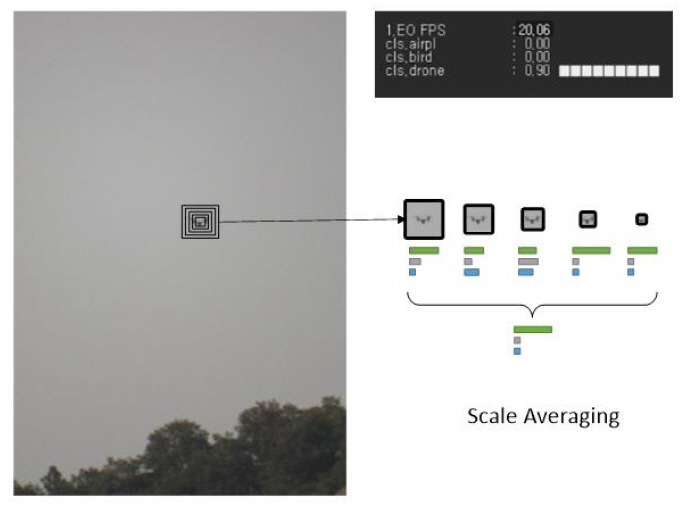
드론 인식을 위해서 그림 8과 같이 추적 수행 후 추적 결과의 0.5배, 0.75배, 1배, 1.25배, 1.5배 이미지를 crop하여 각각의 영상에 인식 알고리즘 적용한 뒤 다섯 세트의 평균 결과를 최종 인식 결과로 판정하였다. 이때 인식 결과의 fluctuation을 줄이기 위해 누적된 인식 결과를 weighted sum하여 인식 결과의 정확도를 향상시켰다.
4. 지시제어 서브시스템
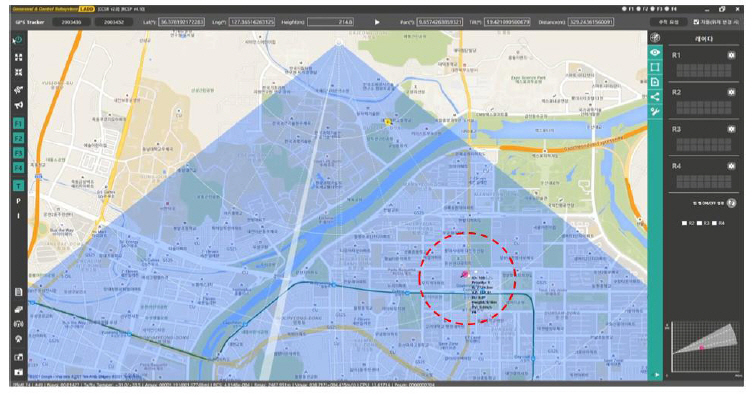
지시제어 서브시스템은 레이다 서브시스템과 EO/IR 서브시스템의 설정 및 제어를 지원하고, 레이다 서브시스템의 탐지 결과를 기반으로 의심 표적들의 위협도를 계산하여 위협도가 가장 높은 표적 정보를 EO/IR 서브시스템으로 제공한다. 또한 레이다 서브시스템에서 탐지한 표적 정보와 EO/IR 서브시스템에서 전송한 표적 영상을 운용자에게 전시하는 기능도 제공하며, 경찰청의 불법 무인 비행장치 대응 체계, UTM(UAS Traffic Management) 체계 등에 표적 정보를 제공하는 기능을 수행한다. 그 밖에 시스템 설치 후 EO/IR 서브시스템과 레이다 패널의 정렬을 지원하고 주거 지역 및 인구 밀집 지역에 대한 레이다 방사 전력 감소(또는 off)를 위한 구역 설정 등을 지원한다. LADD 시스템의 인터페이스는 그림 9와 같다.
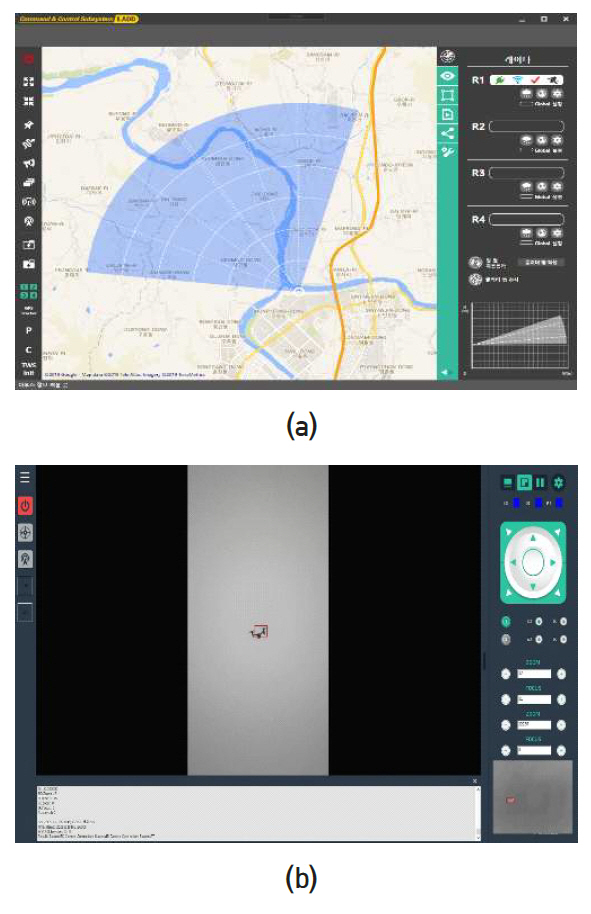
레이다의 전시창은 그림 10(a)와 같이 전자 지도 위에 부채꼴 형태로 레이다의 탐지영역을 나타내며, 탐지 후 추적이 시작된 표적에는 별도의 마커가 표시되고 이 정보는 EO/IR 운용자에게 전달된다. EO/IR 영상전시창은 그림 10(b)와 같이 EO 영상과 IR 영상 기반의 표적 영상과 탐지, 추적, 인식 결과를 화면에 전시해 준다.
레이다가 탐지한 표적 위치로 EO/IR 카메라가 지향할 수 있도록 레이다와 EO/IR 장비의 연동 제어 알고리즘을 개발해 지시제어 서브시스템에 탑재하였다. 연동 알고리즘의 입력은 레이다의 위도, 고도, 경도, 설치 자세(Roll, Pitch, Yaw), EO/IR의 위도, 고도, 경도, 설치 자세(Roll, Pitch, Yaw)이며, 이를 획득하기 위해 레이다와 EO/IR 서브시스템 설치 후 각 장비의 위치와 자세를 측정해야 한다. 전자 나침반의 경우 도체나 자성체가 인접한 환경에서 정확한 yaw값을 얻기 어렵기 때문에 국토지리정보원에서 제공하는 GPS 보정정보를 활용해 GPS-RTK 수신기 기반 정밀 자세 측정 방법을 개발하였고, 이를 활용해 레이다와 EO/IR 서브시스템의 정확한 자세를 측정하였다.
Ⅳ. 결론
드론을 이용한 서비스가 다양화되고 대중화되면서 국가중요시설 및 비행금지구역에 대한 드론의 침입과 위협이 국가적, 사회적인 문제로 대두되고 있으며, 막대한 경제적 손실까지 발생하고 있다. 이에 불법 드론 탐지 및 대응 기술에 대한 중요성이 나날이 증가하고 있다.
현재 안티드론 산업은 방위산업 핵심 기술을 기반으로 탐지 및 무력화 장비 위주로 개발되고 있다. 여기에 민간에서 활발히 연구되고 있는 인공지능 기술을 활용하여 지능형 불법 드론 판단 및 대응 기술을 개발한다면 자동화된 탐지, 판단, 무력화 솔루션을 제공할 수 있을 것이다. 이는 특정 장비에 전문화된 전담 인력 및 상시 운용 인력 감축 등을 가능하게 하여 국내 안티드론 산업의 경쟁력을 강화시킬 수 있는 기회가 될 것이다.
민간용 드론 시장에서는 중국에 뒤쳐졌지만 지능형 안티드론 기술 개발을 통해 세계시장의 기술적 우위와 경쟁력을 가질 수 있으며, 불법 드론의 위협으로부터 원자력시설, 공항 등 고위험 국가기 반시설의 방호를 통해 국가 안보를 강화하고 국민의 안전을 확보할 수 있을 것이다.
용어해설
안티드론 위협 가능성이 있는 불법 드론을 탐지, 추적 및 식별하고, 위험 행위 전에 무력화시키는 기술
약어 정리
AESA
Active Electronically Scanned Array
ALADDIN
Advanced hoListic Adverse Drone Detection, Identification Neutralization
AUDS
Anti-UAV Defence System
DARPA
Defense Advanced Research Projects Agency
EO
Electro-Optical
FMCW
Frequency Modulated Continuous Wave
FoV
Field of View
GNSS
Global Navigation Satellite System
GPS
Global Positioning System
GT
Ground Truth
IR
Infra-Red
KCF
Kernelized Correlation Filter
LADD
Low Altitude Drone Detection
LNA
Low Noise Amplifiers
MFP
Mobile Force Protection
MWIR
Mid-Wave Infrared
OFKT
Optical Flow and Kalman fliter Tracking
PESA
Passive Electronic Scan Antenna
PoT
Pixel on Target
PTZF
Pan/Tilt/Zoom/Focus
RCS
Radar Cross Section
RF
Radio Frequency
RTK
Real-Time Kinematic
SSPA
Solid State Power Amplifiers
UAV
Unmanned Aerial Vehicle
ULA
Uniform Linear Array
UTM
Unified Threat Management
YOLO
You Only Look Once
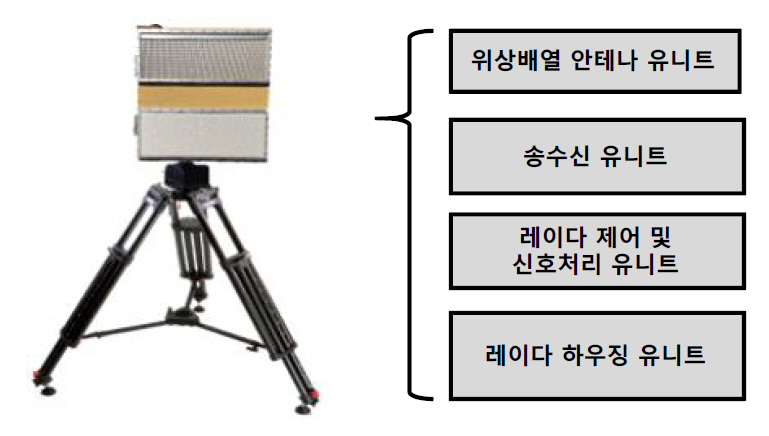
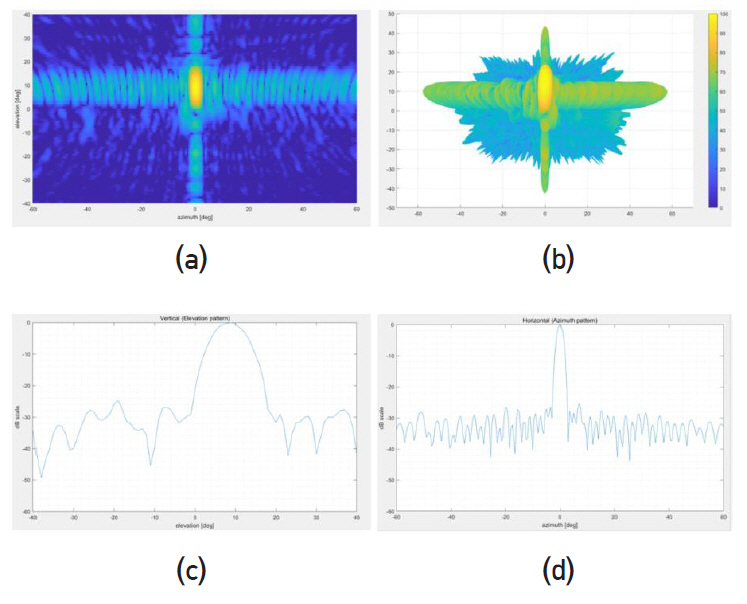
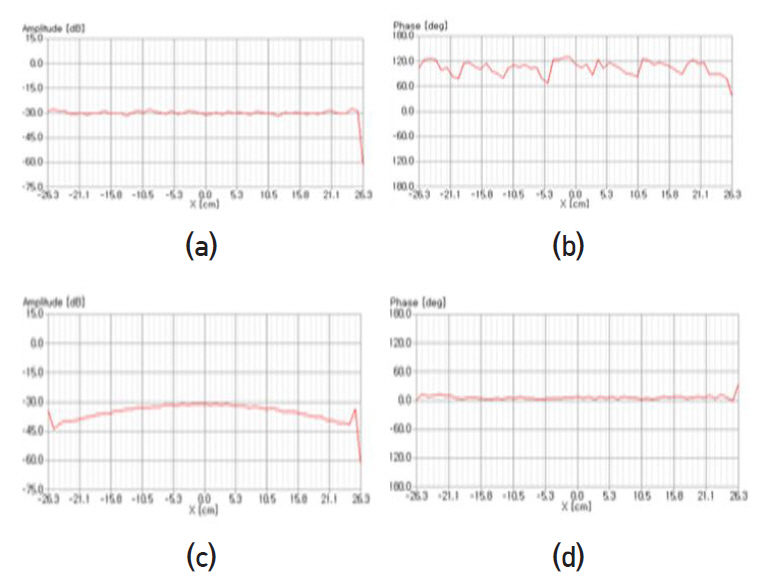

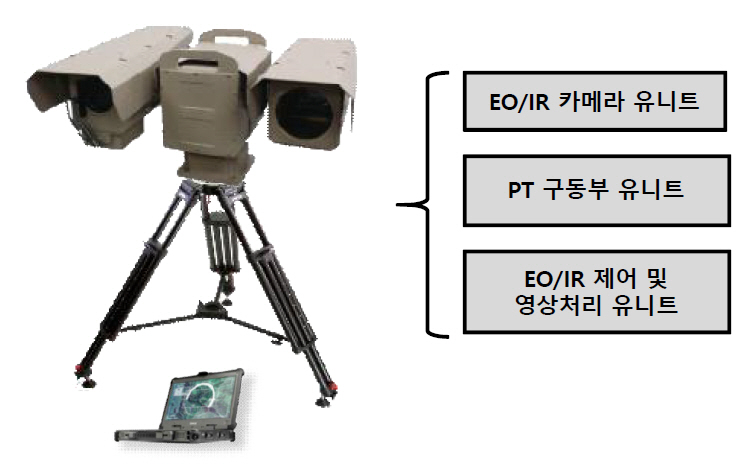
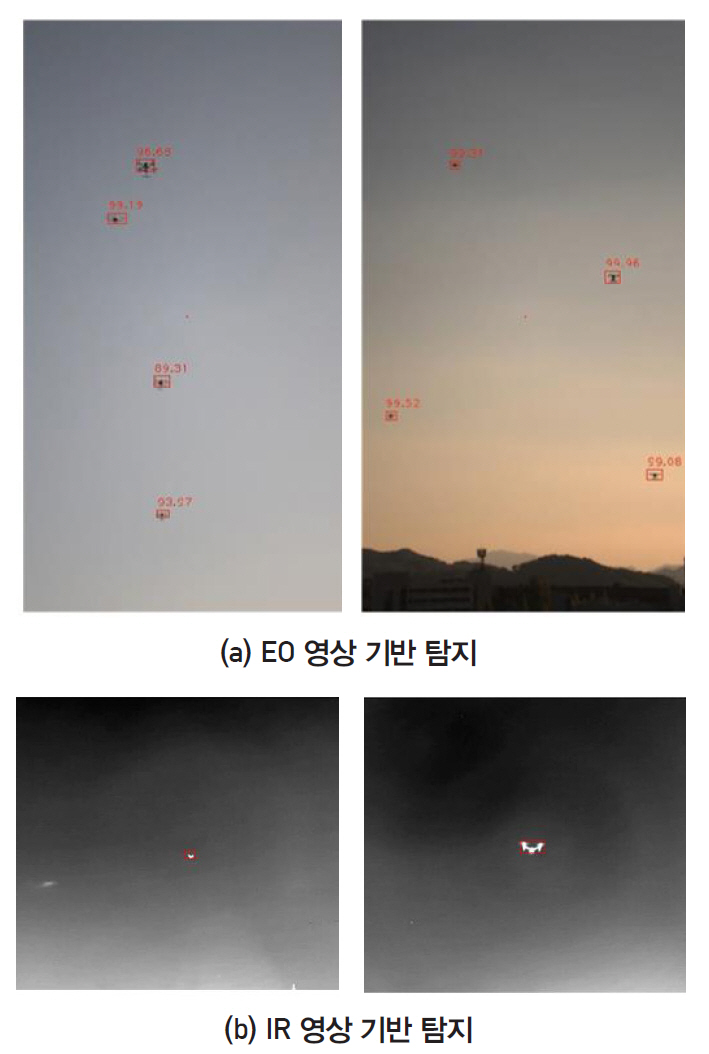
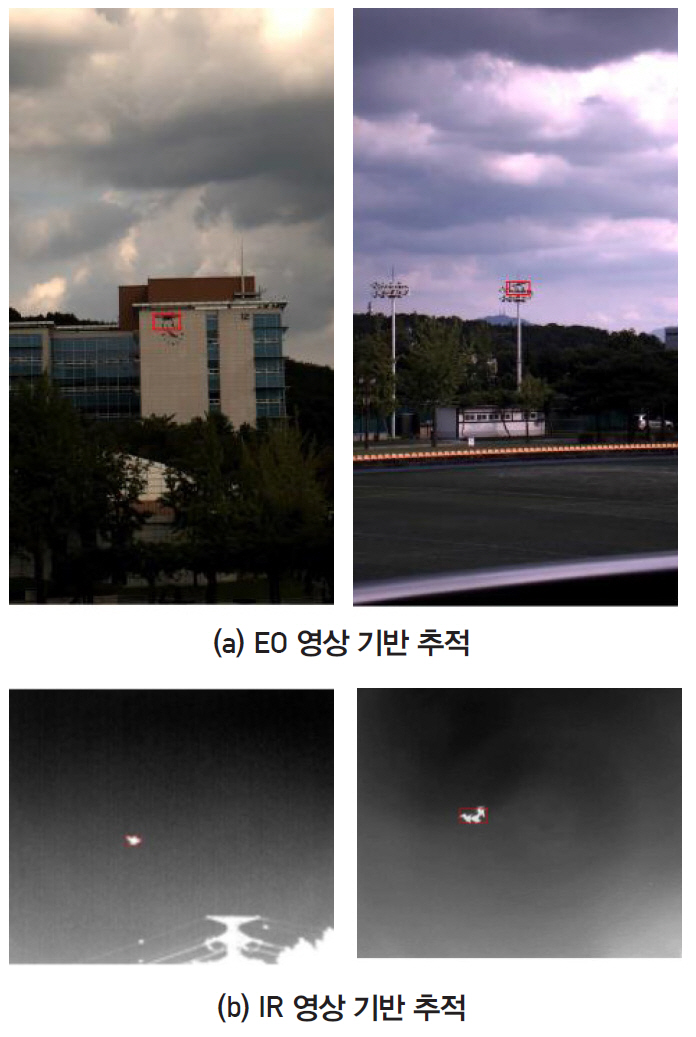
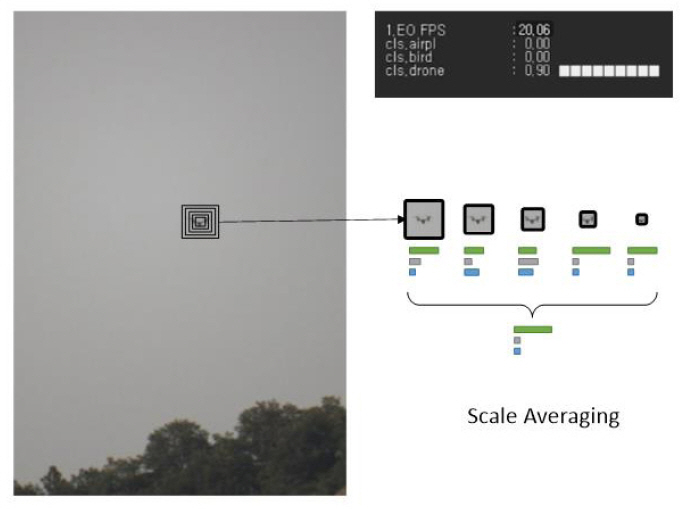
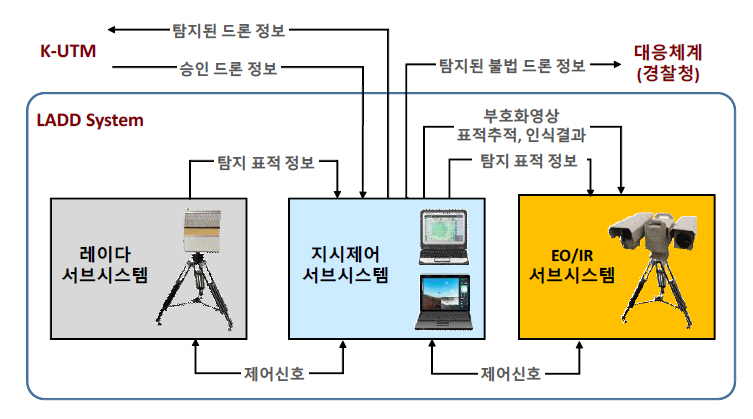
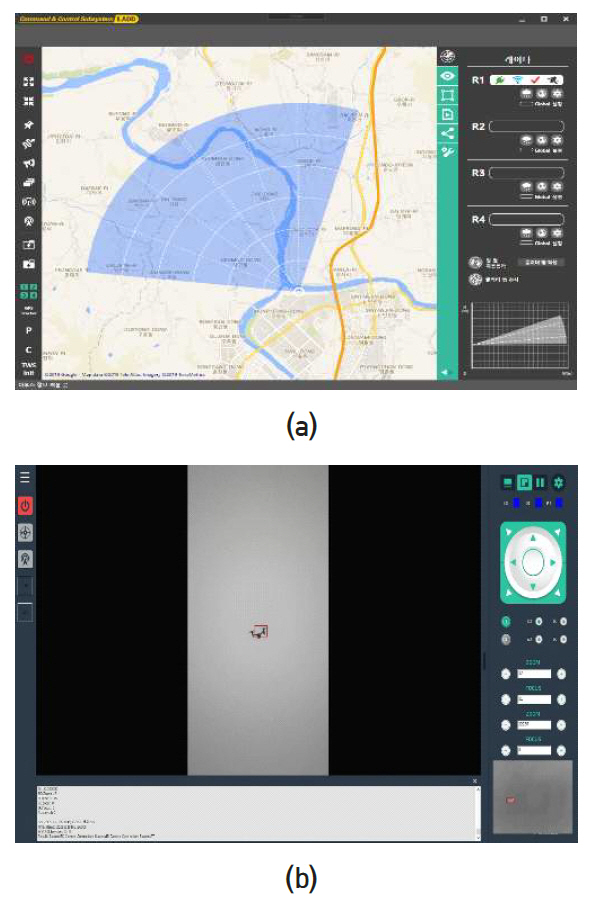
표 1 탐지 센서별 장단점
출처 Reproduced with permission from [2].
표 2 무력화 방법별 장단점
출처 Reproduced with permission from [2].
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.