대규모 디바이스의 자율제어를 위한 EdgeCPS 기술 동향
EdgeCPS Technology Trend for Massive Autonomous Things
- 저자
-
전인걸차세대시스템SW연구실 igchun@etri.re.kr 강성주차세대시스템SW연구실 sjkang@etri.re.kr 나갑주차세대시스템SW연구실 funkygap@etri.re.kr
- 권호
- 37권 1호 (통권 194)
- 논문구분
- 인공지능 서비스 및 인프라 기술
- 페이지
- 32-41
- 발행일자
- 2022.02.01
- DOI
- 10.22648/ETRI.2022.J.370104
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- With the development of computing technology, the convergence of ICT with existing traditional industries is being attempted. In particular, with the recent advent of 5G, connectivity with numerous AuT (autonomous Things) in the real world as well as simple mobile terminals has increased. As more devices are deployed in the real world, the need for technology for devices to learn and act autonomously to communicate with humans has begun to emerge. This article introduces “Device to the Edge,” a new computing paradigm that enables various devices in smart spaces (e.g., factories, metaverse, shipyards, and city centers) to perform ultrareliable, low-latency and high-speed processing regardless of the limitations of capability and performance. The proposed technology, referred to as EdgeCPS, can link devices to augmented virtual resources of edge servers to support complex artificial intelligence tasks and ultra-proximity services from low-specification/lowresource devices to high-performance devices.
Share
Ⅰ. 서론
최근 컴퓨팅 기술이 발전함에 따라 다양한 전통 산업 분야와의 융합이 시도되고 있으며, 특히 5G의 등장은 단순한 모바일 단말기뿐만 아니라 현실 세계의 수많은 디바이스에 무선통신의 활용을 촉진하게 되었다. 그러나 현실 세계에 설치된 모든 디바이스를 개별적으로 모니터링하고 제어하는 것은 불가능하기 때문에 디바이스 스스로 학습하고 자율적으로 행동하여 인간과 소통하기 위한 기술의 필요성이 대두되기 시작하고 있다[1]. 특히, 2020년대 후반에 상용화될 6G에서는 1km2에 약 100만 개의 디바이스를 수용할 수 있으며, 70% 이상의 IoT 단말이 이동통신망에 접속할 것으로 예상된다[2]. 이러한 변화에 따라 세계 최초의 6G 상용화 목표 달성과 함께 대규모 무선 디바이스의 종단 간 초저지연 서비스를 제공하고 다양한 종류의 디바이스를 자율적으로 제어하기 위한 기술 개발이 시급히 필요한 상황이다.
본고에서는 대규모 디바이스에서 발생하는 데이 터를 저지연·초고속 처리하며 무수히 많은 사물로 구성된 스마트공간(공장, 쉽야드, 도심 등)에 대한 자율적인 제어를 가능하게 하는 새로운 컴퓨팅 패러다임(Device to the Edge)에 대해 소개하고자 한다.
Ⅱ. EdgeCPS 개념
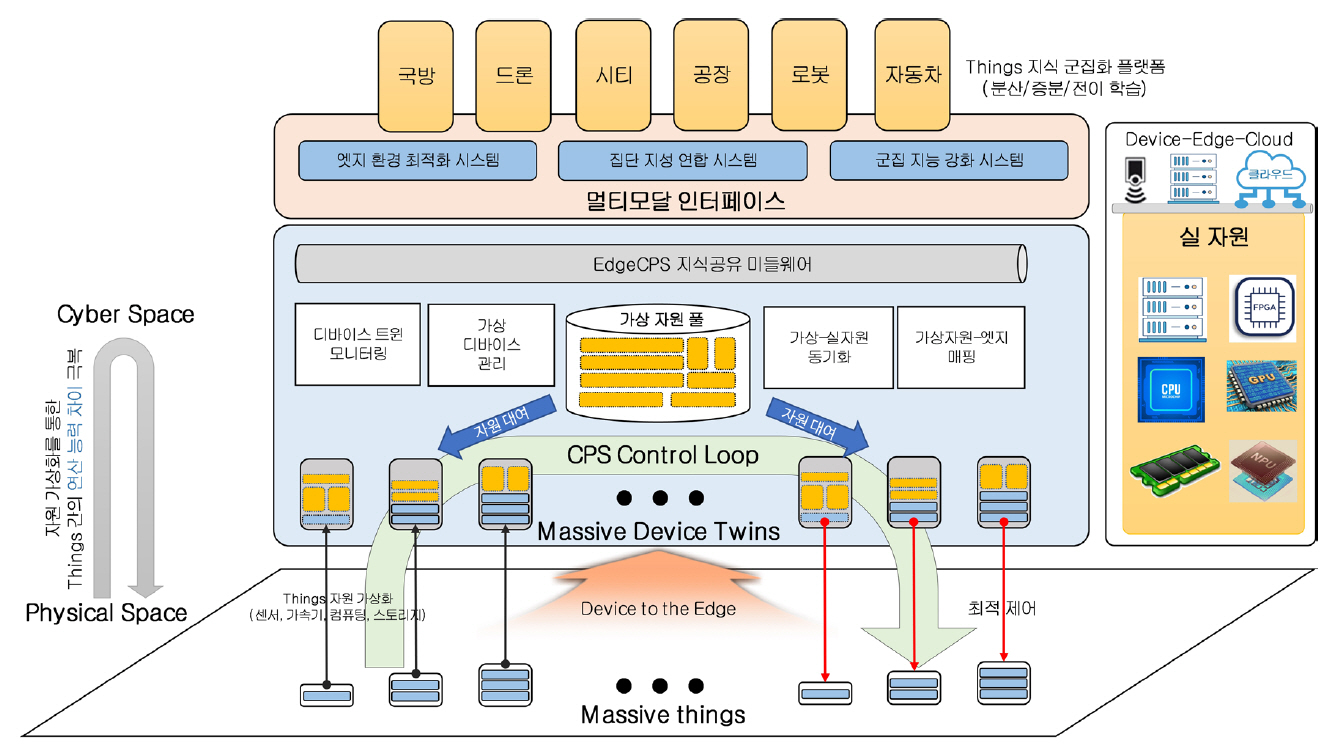
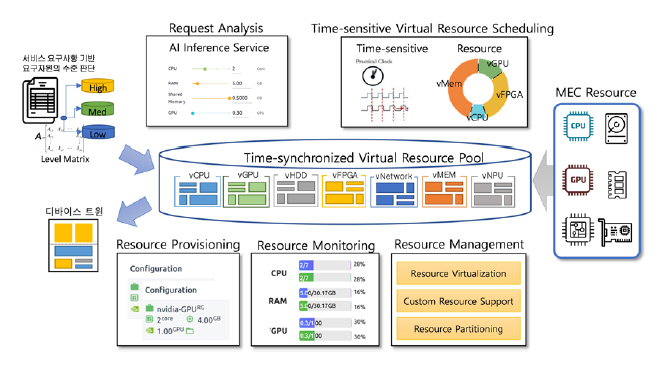
EdgeCPS는 ETRI의 “인공지능 처리성능 한계를 극복하는 고성능 컴퓨팅 기술 연구” 과제에서 개발 중인 엣지 서버 기반 소프트웨어 플랫폼으로 실세계에서 활용되고 있는 다양한 종류의 대규모 디바이스 간 연동을 통해 실세계를 지능 제어하기 위한 기술이다. 특히, 실세계의 다양한 주변 환경과 사람들의 행동 방식 및 여러 종류의 디바이스들에 대한 실시간 분석을 통해 의미 있는 데이터를 수집·생성하고, 이를 통해 컴퓨팅 시스템 내에 실세계(Physical Systems)와 동일한 가상화된 세계(Cyber Systems)를 구축하여 지식화된 정보에 기반한 인공 지능 기술을 활용하여 실세계를 정밀 제어하는 기술이다. 그림 1은 EdgeCPS의 전체적인 개념모델을 제시한다.
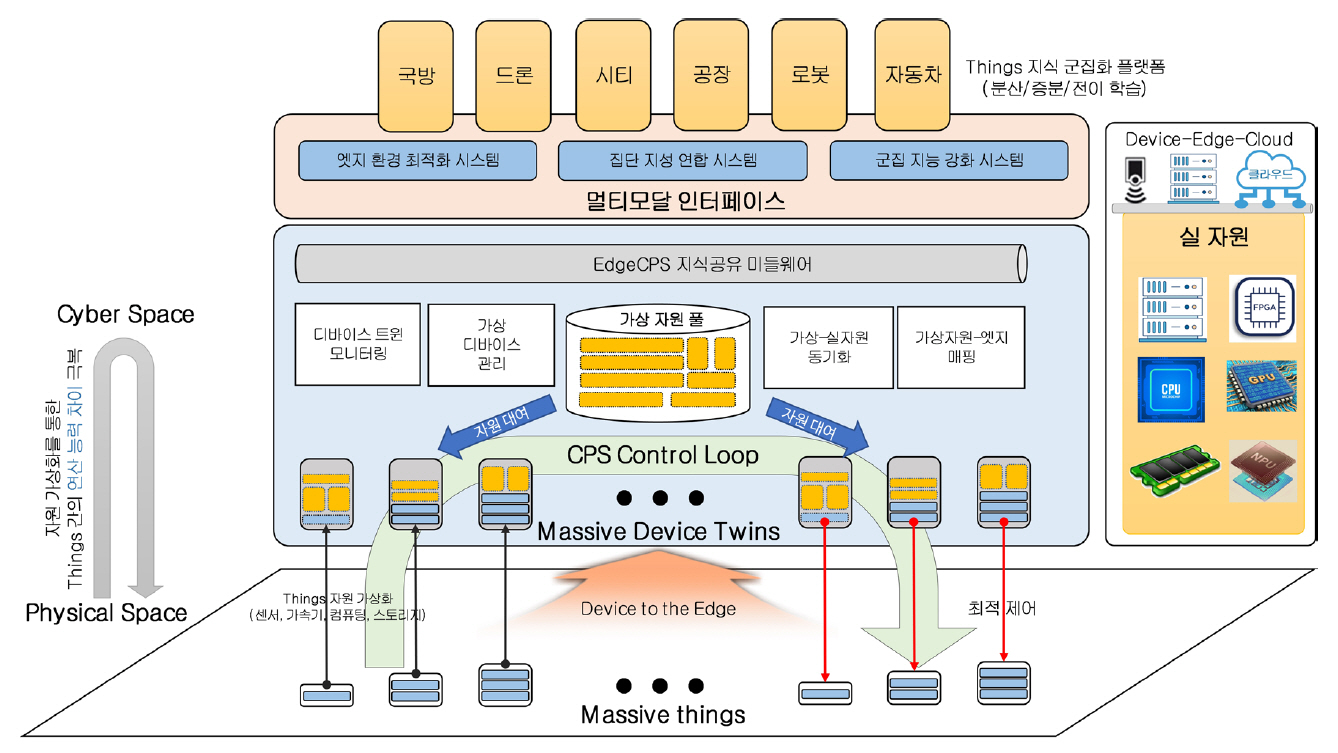
EdgeCPS에서는 Autonomous Things, IoT, Edge Cloud, AI 등 다양한 최신 ICT 기술이 적용되고 있으며, 다음과 같은 두 가지의 새로운 기술 패러다임을 활용한다. 첫 번째 기술은 다양한 사양과 성능을 가진 디바이스들의 연산능력 차이를 극복하기 위한 디바이스리스 컴퓨팅 기술이다[3,4]. 디바이스리스 컴퓨팅은 클라우드 컴퓨팅에서 제시하는 기존의 서버리스 컴퓨팅과 대비되는 개념으로 디바이스 운영·관리 및 용적 계획의 결정이 개발자나 운영자로부터 완전히 숨겨져 있는 시스템이다. 특히 디바이스리스 컴퓨팅 플랫폼에서 모든 번거로운 일을 처리하기 때문에 서비스가 실행되는 디바이스의 하드웨어나 운영체제(OS)에 대해서 알지 못해도 다양한 디바이스를 쉽고 편리하게 이용할 수 있게 해 준다. 특히, 가상화된 공간에서 자원공유의 탄력성을 제공하여 저성능 단말이 가속기와 같은 고가의 고성능 디바이스 없이도(Device-less) 학습·추론 등 다양한 AI 연산을 수행할 수 있게 되는 등 대규모의 이종 디바이스가 네트워크에 연결되는 미래사회에 필수적인 핵심 기술이다.
두 번째는 대규모 환경에 배치되어 있는 실제 디바이스와 가상환경에서 동작하는 디바이스 트윈을 실시간으로 동기화하여 정밀제어하기 위한 서버자원융합형 대규모 디바이스 가상화 기술이다. 이 기술은 초대규모 객체 관리 기술과 초성능 워크 로드처리 기술을 포함하고 있다. 디바이스 가상화 기술에서는 다양한 디바이스의 속성에 대한 효과적인 모델 명세 및 디바이스 간 관계 모델링 기술을 통해 초대규모 디바이스 트윈을 구현할 수 있는 이론적 근간을 마련하고, 가상화된 자원을 상황에 따라 최적화된 방식으로 디바이스 트윈에 분할하여 할당할 수 있는 자원 동적 관리 오케스트레이션 기술을 연구한다.
Ⅲ. EdgeCPS 주요 기술
1. 디바이스리스 컴퓨팅
IaaS(Infrastructure as a Service), PaaS(Platform as a Service), SaaS(Software as a Service) 등으로 대표되는 클라우드 컴퓨팅은 최근 중앙집중적인 구조적 한계와 고비용의 한계를 극복하기 위해 서버리스 컴퓨팅의 개념을 새롭게 도입하였다[5]. 서버리스 컴퓨팅은 전통적인 클라우드 환경에서 고정된 자원을 계약된 시간만큼 활용하는 기존 방식과 다르게 사용자가 사용하는 기능(Function)이 특정 조건에서(Triggering) 물리적 자원에 구애받지 않고 동작할 수 있도록 지원하는 컴퓨팅 기술로 BaaS(Backend as a Service) 혹은 FaaS(Function as a Service)라고 불리기도 한다. 서버리스 컴퓨팅은 고정적으로 할당된 자원에 구애받지 않고 서비스를 수행할 수 있으며 시간 단위 비용을 지불한다. 결과적으로 서버리스 컴퓨팅은 그 명칭과 다르게 강건한 서버 중심의 컴퓨팅환경을 구축하여 무수히 많은 클라이언트 요청을 지연없이 빠르고 안정적으로 처리하는 기술이라고 할 수 있다.
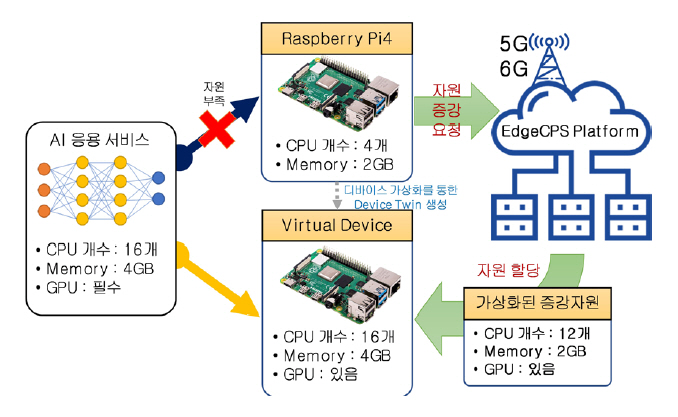
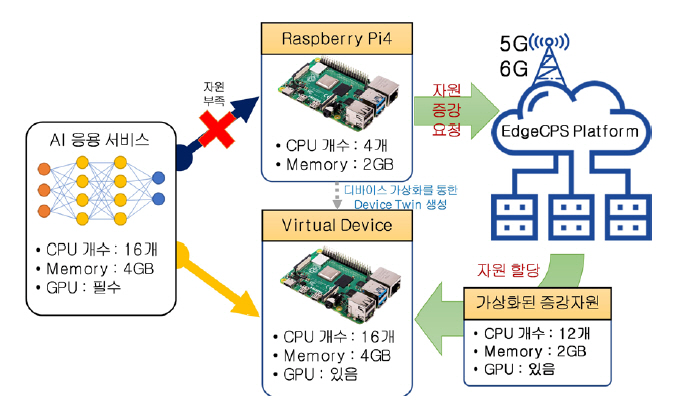
EdgeCPS에서 제시하는 디바이스리스 컴퓨팅은 서버 중심이 아닌 디바이스를 중심에 둔 컴퓨팅 기술로, 서로 다른 연산 능력을 가지는 개별 디바이스들이 자원의 한계를 극복하고 고성능의 컴퓨팅을 수행할 수 있도록 지원하는 기술이다. 그림 2는 디바이스리스 컴퓨팅에 대한 개념도이다. 그림과 같이 디바이스의 자원 한계 이상의 자원이 필요한 응용 수행 요청이 발생하면 디바이스는 엣지 서버를 통해 현재 디바이스와 대응되는 가상디바이스를 생성하고 부족한 자원에 대한 증강을 통해 응용의 요구사항을 만족시킬 수 있게 된다. 이와 같이 디바이스리스 컴퓨팅 기술은 디바이스리스라는 용어와 다르게 디바이스가 없는 상황이 아닌 디바이스 중심적인 컴퓨팅 기술이며, 본 절에서는 디바이스리스 컴퓨팅을 실현하는 주요 기술에 대해 소개한다.
가. 실디바이스의 가상화
디바이스리스 컴퓨팅의 첫 번째 기술은 실디바이스에 대한 가상화 기술이다. 개별 디바이스들은 엣지 서버 내에 생성된 가상디바이스를 할당받고 사용자 응용 요구에 따라 실디바이스 혹은 가상디바이스에서 응용이 구동된다. 엣지 서버에 생성되는 가상디바이스는 응용 수행이 가능한 SW 환경(운영체제·플랫폼·프레임워크)으로 제공되며, 가상화 인프라로는 컨테이너 기반 가상화 기술을 사용한다. 가상 머신을 통한 가상화를 수행할 경우 엣지 서버의 물리적 한계로 인해 대규모의 디바이스 관리가 쉽지 않다. 대표적인 컨테이너 기반 가상화 SW는 리눅스 재단에서 오픈소스로 관리되고 있는 Kubernetes가 있으며, Kubernetes의 관리 단위인 Pod의 형태로 가상디바이스가 생성된다[6]. 각 Pod는 응용 실행환경 관리, 블록 장치 관리 및 실-가상 연동 관리 컨테이너 등으로 구성된다.
나. 마이크로서비스 기반 실행 가상화
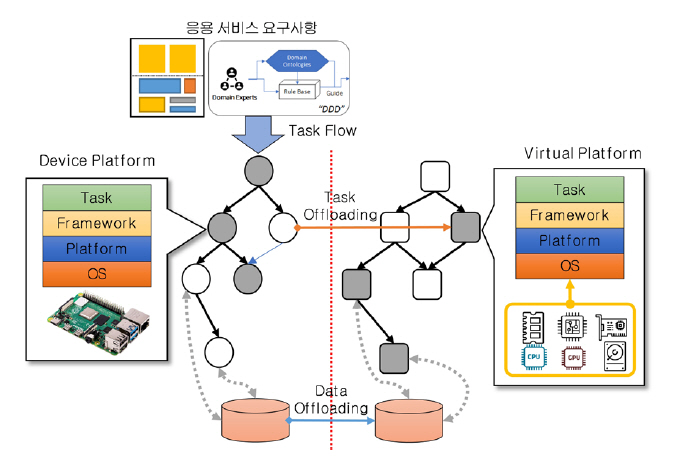
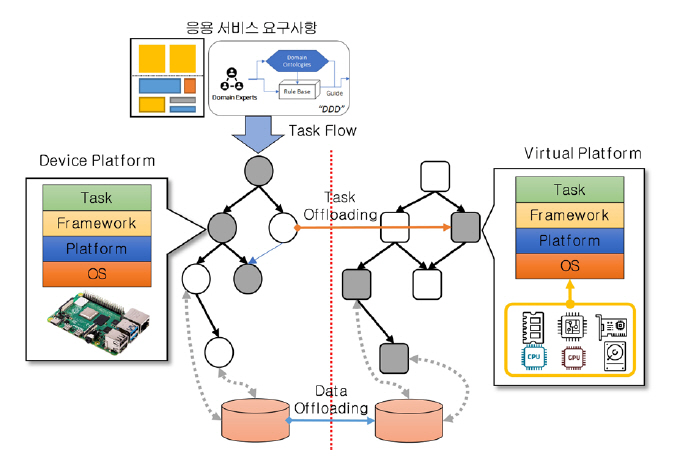
디바이스리스 컴퓨팅의 두 번째 기술은 마이크로서비스 응용 실행 기술이다. 일반적으로 마이크로서비스는 독립적으로 실행 가능한 가장 작은 실행 단위를 의미하며, 이를 이용한 어플리케이션의 워크플로우는 작업 기반 또는 서비스 기반의 형태로 분류된다. 작업 기반 시스템은 리소스 매핑 기능과 내결함성을 기반으로 구성되며, 서비스 기반 시스템은 관리 및 구성을 위한 서비스 인터페이스 기반으로 구성된다. EdgeCPS에서 수행되는 마이크로서비스 어플리케이션 실행 기술은 목표서비스 요구사항에 따라 가상디바이스에서 어플리케이션이 수행하는 서비스가 결정되면, 실디바이스와 동일한 어플리케이션이 가상디바이스로 배포되어 실행된다. 워크플로우 형태로 구성된 어플리케이션은 실디바이스 혹은 서버에서 마이크로서비스 단위로 리소스를 받아 동작함으로써 제한된 자원을 효율적으로 활용한다.
EdgeCPS에서는 실-가상디바이스의 일대일 관계가 서버 내 디지털 트윈으로 관리되며 디바이스의 상태 정보 관리와 동적인 어플리케이션 배포를 수행한다. 대표적인 마이크로서비스 워크플로우 관련 SW로는 마이크로서비스 간 데이터 공유를 제어 하는 오픈소스 서비스 메시 플랫폼인 Istio [7], DAG 기반 배치 스케줄링 플랫폼 Aiflow [8], 컨테이너 기반 워크플로우 엔진 Argo Workflow [9] 등이 있다. 그림 3은 마이크로서비스 단위로 구성된 EdgeCPS 에서의 어플리케이션 실행을 나타내고 있다.
다. 서비스 기반 HW 가속 지원
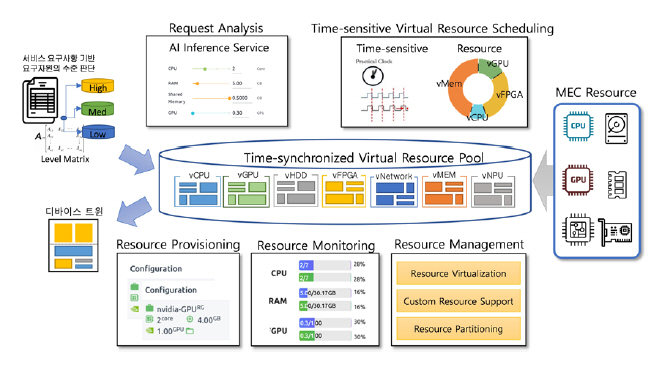
디바이스리스 컴퓨팅의 세 번째 기술은 서비스 기반 HW 가속 지원 기술이다. 가상디바이스를 통한 자원 증강을 위해서는 서버상에 자원 증강을 지원하는 HW 장치(GPU, NPU, FPGA)에 대한 공유 지원 기술이 필요하다. 예를 들어, GPU 자원을 요구하는 마이크로서비스들이 정상적으로 실행되기 위해서는 GPU가 탑재된 물리 서버 노드에 가상디바이스가 생성되어야 한다. 또한 개별적인 가상디바이스 실행환경은 GPU를 독점하고 있는 것처럼 구성되어야 한다. 그러나 GPU의 물리적인 특성으로 인해 일반적인 환경에서는 동시에 요청된 GPU 태스크에 대한 처리가 제공되지 않는다. 즉, HW 장치 특성에 따라 가상디바이스가 공유되지 않는 현상이 나타나게 되며, 이를 해결하기 위해서는 HW 가속 장치에 대한 자원관리 및 스케줄링을 위한 서비스 모듈이 필요하다.
대표적인 GPU 공유 모델 연구로는 하나의 GPU를 여러 응용이 공유할 수 있는 SW 지원 가상화 기술인 MPS(Multi-Process Service)[10]와 HW 지원 가상화 기술인 MIG(Multi-Instance GPU) [11]가 있으며, Nvidia/K8s-device-plugin [12]은 Kubernetes 기반으로 GPU를 가상화하여 공유하고 가상화 자원을 관리하기 위한 기능을 제공한다. EdgeCPS에서 그림 4와 같이 GPU에 대한 공유 모델을 바탕으로 NPU, TPU, FPGA등의 HW 가속 지원 기술을 개발하고 있다.
2. 대규모 디바이스 가상화 기술
앞 절에서는 EdgeCPS의 디바이스 성능 한계를 극복하고 자원 증강을 지원하기 위한 디바이스 컴퓨팅 기술에 대해 소개하였다. 본 절에서는 디바이스에 대한 디지털 트윈 구성과 디바이스 자율제어를 지원하는 서버자원융합형 대규모 디바이스 가상화 기술에 대해 소개한다.
가. 디바이스 트윈
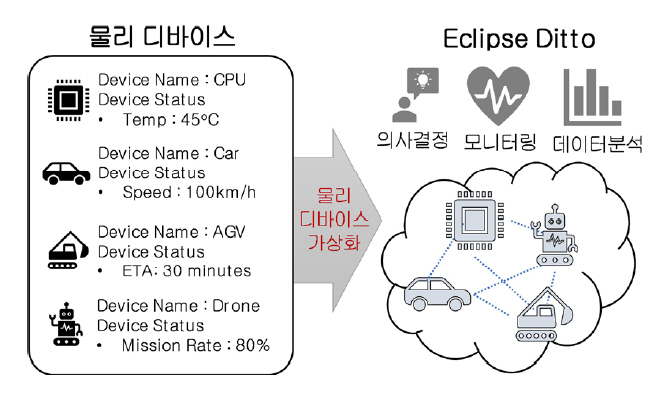
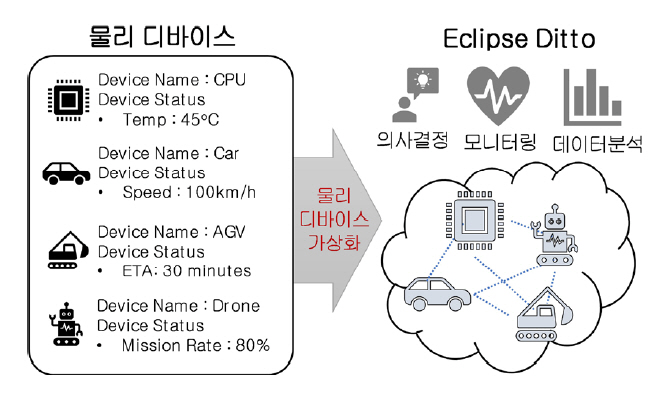
디바이스 트윈은 가상의 공간에서 실제 디바이스들의 제어를 위해 구성된 디지털 트윈을 의미한다. 디지털 트윈은 좁은 의미로 실세계의 사물(디바이스)을 가상공간에 디지털화하여 표현하는 기술을 의미하며, 넓은 의미로는 디지털화된 사물에 대에 대한 CPS 루프를 생성하여 가상 사물을 통한 실제 사물의 제어기능을 포함한다. 즉, 디지털 공간에서 실제 사물은 프로그램으로 표현되어 미래에 대한 예측이나 사물 간 상호작용 시뮬레이션 등이 가능하게 된다. EdgeCPS에서는 다양한 종류의 디바이스들에 대한 디바이스 트윈을 구성함으 로써 관리 가능한 제어 루프를 생성하고 있으며, Eclipse의 오픈소스 프로젝트인 Eclipse Ditto(이하 Ditto) [13]를 활용한다. Ditto는 물리 디바이스(사물)를 추상화된 디지털트윈 객체인 ‘thing’으로 관리하며, 물리 디바이스의 현상 데이터를 유지하는 역할을 한다. Ditto의 주요 기능으로는 Device as a Service(Device를 디지털 트윈으로 추상화해서 API로접근 가능), 디지털 트윈을 위한 상태 관리(동기화, 상태 변경 업데이트 지원을 포함하여 장치의 원하는 상태 및 현재 상태 비교), 액세스 제어(세분화된 리소스 기반 액세스 확인을 적용하여 디지털 트윈에 대한 API 호출에 대한 승인 관리)가 있다. 그림 5는 물리 디바이스가 Ditto를 통해 가상화되어 관리되는 모습을 보여준다. 실세계에서 동작하는 개별 디바이스들은 Ditto의 물리 디바이스 가상화를 통해 상태 정보가 관리되며, 가상화된 각 디바이스들은 모니터링, 데이터분석, 의사결정과 같은 응용 서비스와 연동될 수 있다.
나. 디바이스 연결 지원 인터페이스
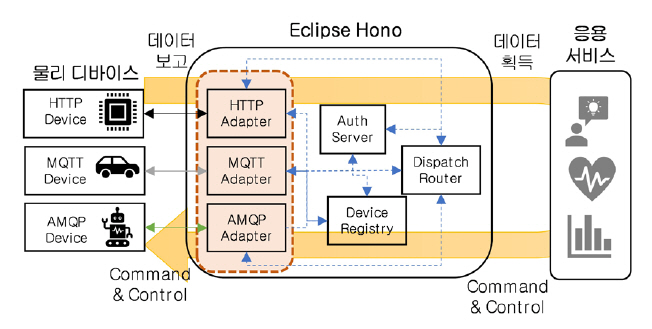
디바이스 트윈을 통해 연결되는 실제 디바이스들은 다양한 네트워크 프로토콜을 가진다. EdgeCPS에서 활용하는 Ditto에서는 다양한 네트워크 프로토콜을 지원하기 위해 Eclipse Hono(이하 Hono) [14]를 활용하고 있다.
Hono는 Eclipse 재단에서 지원하는 오픈소스 프로젝트로, IoT 장치의 통신 프로토콜에 관계없이 동일한 방식으로 상호작용할 수 있는 원격 서비스 인터페이스를 제공한다. 백앤드 응용 프로그램 개발자는 장치 프로토콜에 구애받지 않고 개발을 진행할 수 있으며, 기존 응용 프로그램에 대한 수정 없이 연결 프로토콜을 추가하거나 변경할 수 있도록 하는 중간 단계 역할을 한다. Hono도 Ditto와 마찬가지로 모듈식 구조로 구성되어 있으며, 그림 6에 나타나 있다.
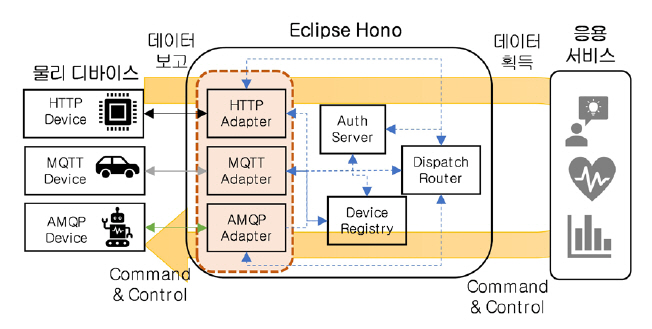
CPS 제어 루프를 완성하기 위해서는 물리 디바이스의 데이터를 전송하는 것뿐만 아니라 물리 디바이스로 명령을 전달할 수 있어야 한다. Hono에서는 명령을 내리기 위한 메시지 타입을 Command와 Control의 두 종류로 구분해 제공한다. Command 메시지는 one-way 방식으로 송신자가 응답 메시지를 기대하지 않을 때 사용하며, 이것의 사용 예시로는 상태 변경에 대해 장치에 알리는 것이다. Control 메시지는 응답을 기대하는 타입으로 수신자는 명령이 정상적으로 수행되었는지를 나타내는 상태 정보와 처리 과정 중에 생성된 데이터를 포함하여 응답할 수 있다.
Ⅳ. EdgeCPS 응용 사례
지금까지 대규모 디바이스의 자율제어를 지원하는 플랫폼인 EdgeCPS를 구성하는 기술에 관한 연구 동향과 활용 방법을 소개했다. 본 장에서는 EdgeCPS를 활용한 다양한 응용 사례에 대해 살펴 보고자 한다.
1. AI 서비스 개발 사례
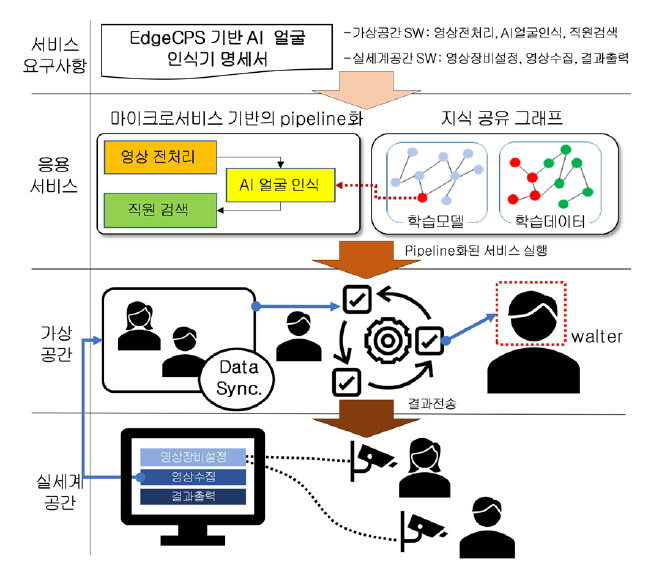
EdgeCPS 활용하는 AI 서비스에서는 개별 디바이스를 활용하는 온디바이스 기술, 모델 경량화 기술, 그리고 분산환경을 활용한 연합 학습과 군집 학습 등의 다양한 AI 기술[15-17]을 활용할 수 있다. 특히 EdgeCPS는 퍼블릭망과 물리적으로 분리되는 엣지 서버를 기반으로 하고 있어 최근 사회적인 이슈가 되고 있는 민감정보를 활용한 데이터 수집 및 AI 서비스를 안전하게 제공할 수 있다. 또한 디바이스를 중심으로 AI 서비스를 제공하기 때문에 빠른 응답속도로 저지연·실시간 서비스를 원활하게 수행할 수 있게 된다. 그림 7은 EdgeCPS 기반 AI 서비스 개발 시나리오로 산업현장의 안전사고 방지 시스템을 보여준다.
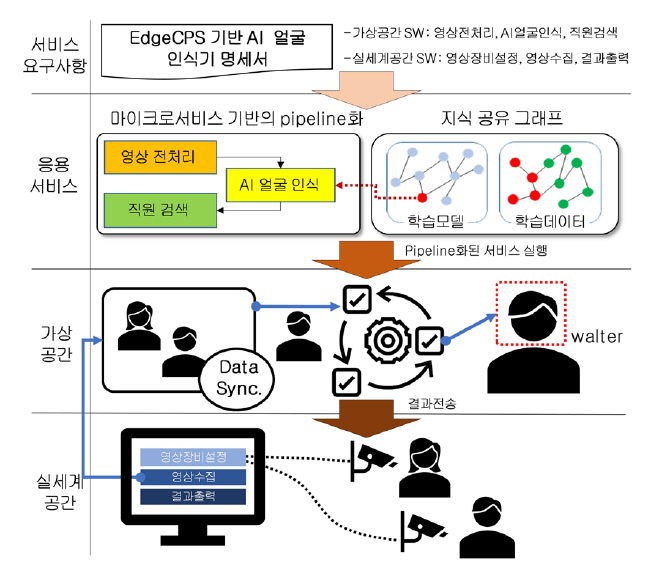
공장 내에서 안전사고를 줄이고자 공장 직원들의 얼굴과 안전 장비 착용 여부를 AI 기반으로 확인하는 간단한 시스템을 예로 든다. 일반적인 공장에서는 간단한 영상장치만을 보유하고 있어서, 대용량 영상 데이터를 빠르게 처리해야 하는 AI 기반의 서비스를 제공하기 쉽지 않은 상황이다. 이러한 경우 EdgeCPS에서는 저성능 영상 장비 디바이스들을 가상공간에서 디지털 트윈화하고, 가상화된 영상 AI에 필요한 시스템 자원(CPU Core, GPGPU, Memory 등)을 추가적으로 할당하여 사용자가 요구하는 서비스를 수행할 수 있는 환경으로 성능 증강을 제공한다. 특히, 마이크로서비스 실행 기술을 통해 서비스 어플리케이션을 작은 크기의 어플리케이션으로 분할하여 가상의 여러 노드에 분산배치하고, 다양한 최적화를 수행할 수 있게 파이프라인을 구성하여 실행하는 구조로 동작한다. 즉, 운영환경과 플랫폼·디바이스 상황에 맞게 파이프라인의 개별 단계에서 적합한 모델 및 알고리즘의 선택을 가능하게 하는 등 사용자 요구에 따른 가변형 서비스 제공이 가능해진다. 또한, EdgeCPS에서는 다양한 응용 분야 및 서비스 요구사항을 동적으로 반영하기 위해 지식공유 미들웨어[18]라 불리는 AI 데이터의 집합소를 구축하여 관리함으로써 실-가상디바이스에 최적화된 서비스를 제공하고 있으며, 그래프 구조의 데이터 관리를 통해 AI 서비스의 확장성을 높이고 있다.
2. 도심 교통 시스템 활용 사례
도심은 승용차, 자전거, 택시, 지하철 등 대규모 디바이스가 밀집한 환경이며, 일반적으로 5G 이동 통신 인프라가 잘 갖춰진 곳이다. 또한 도심은 자율주행 자동차나 배송용 드론 등 미래형 교통 물류 수단을 실시간 근접 제어하기 위한 플랫폼이 요구되는 영역으로서 EdgeCPS의 주요 수요처로 예상된다. 이를 통해 도심 통합 관제, 자율주행, 공유형 교통서비스 등 다양한 교통서비스에 EdgeCPS를 활용할 수 있을 것이다.
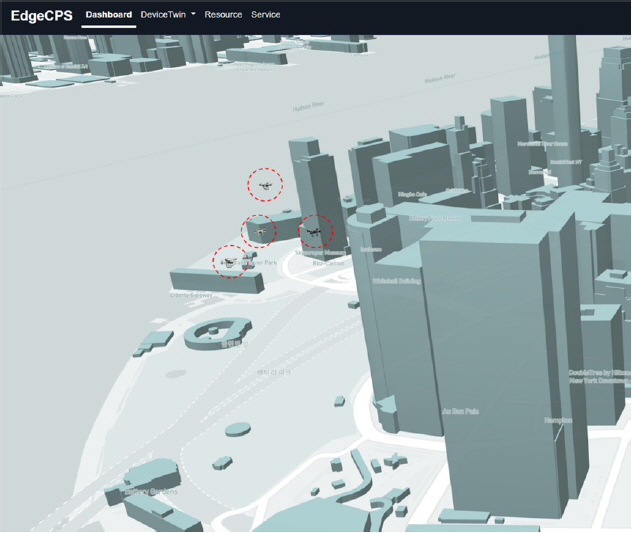
다양한 도심 교통서비스 사례 중에서 드론을 통한 라스트-마일(Last-mile) 배송은 현재 여러 기체 제작사와 플랫폼 기업들이 독자적인 개념과 시제품을 제시하는 분야로서 성장 가능성이 매우 큰 영역으로 평가받는다. 하지만 도심 내 수많은 드론의 효율적인 제어를 통해 상품을 고객에게 정확하고 저렴하게 배송해야 하는 기술적·경제적 난제를 가진 분야이기도 하다.
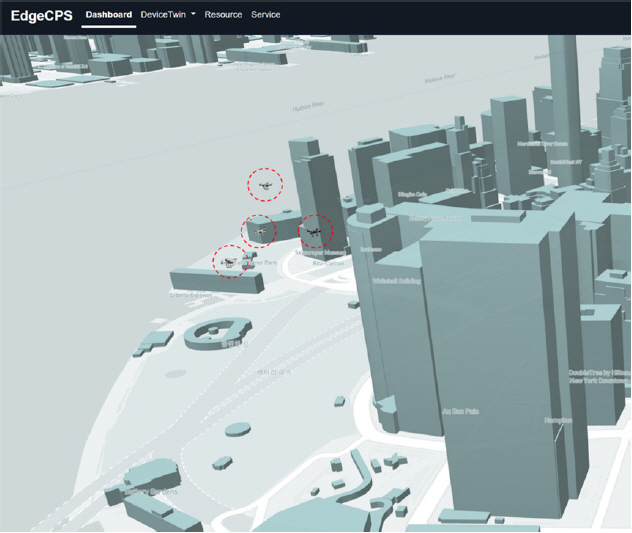
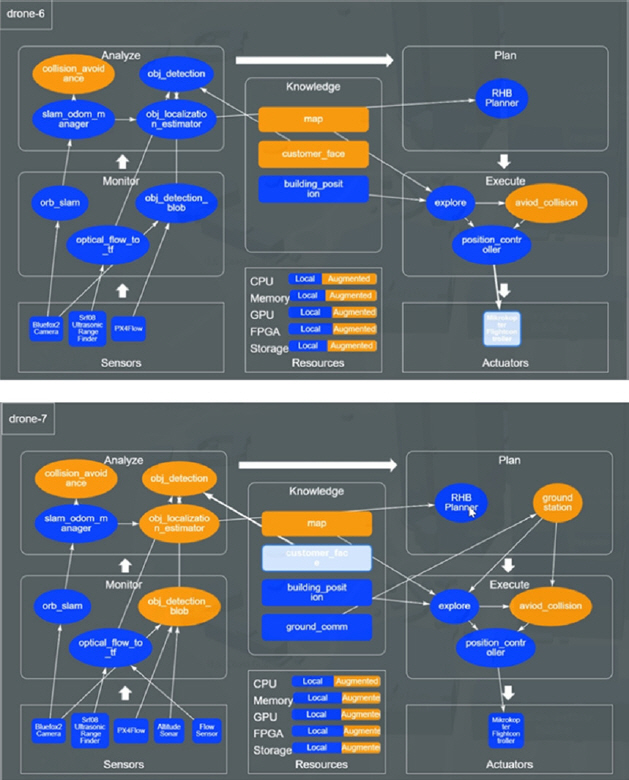
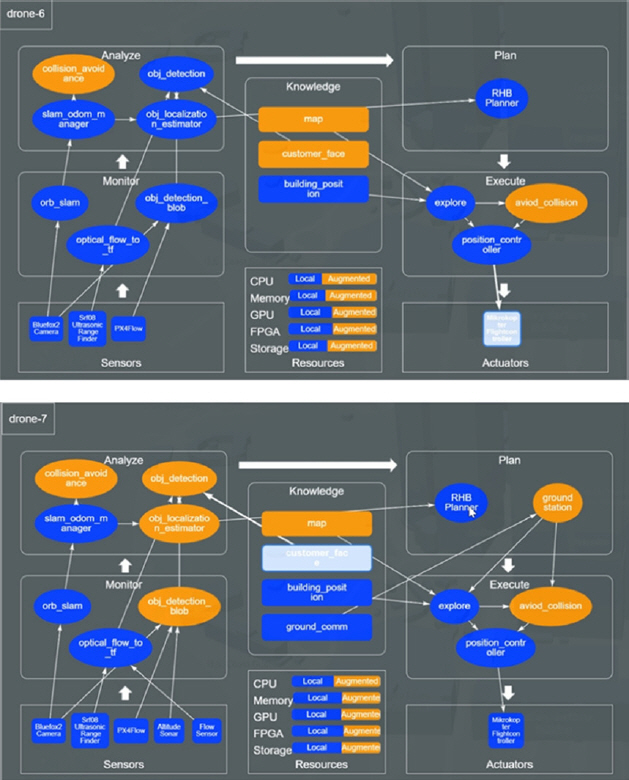
ETRI의 EdgeCPS 플랫폼 개발 과제에서는 기체의 종류와 규격, 기능과 성능에 차이가 있는 다수의 드론을 대상으로 디바이스리스 컴퓨팅을 통해 기능과 성능을 증강하는 개념 증명 사례(PoC)를 개발하고 있다. 그림 8은 EdgeCPS 기반의 라스트-마일 배송 PoC를 보여준다. 현재 도심에는 다수의 드론이 비행 중이며, 각 드론은 다양한 임무 (‘기지에서 대기’, ‘배송 준비’, ‘배송’, ‘고객 인식’, ‘상품 전달’, ‘귀환’) 중에서 어느 한 가지를 수행하고 있다. 그림 9는 현재 ‘배송’ 임무를 수행 중인 임의의 드론 2대의 기능 실행 상태를 보여주는 것으로서, 청색은 드론 자체에서 실행되거나 보유한 기능이나 모델, 컴퓨팅 자원을 의미하며, 홍색은 EdgeCPS를 통해 제공받는 기능이나 모델, 컴퓨팅 자원을 의미한다. 이처럼 EdgeCPS는 보유한 센서/액추에이터 장치나 기능, 컴퓨팅 자원이 상이한 디바이스도 동일한 수준의 임무를 수행할 수있도록 기능과 성능을 증강하는 것을 목표로 개발되고 있다.
3. 메타버스 활용 사례
메타버스(Metaverse)는 ‘~너머에(Beyond)’라는 뜻을 지닌 ‘meta’와 ‘세계(Universe)’라는 뜻을 지진 ‘verse’의 합성어로 1992년 Neal Stephenson의 SF 소설인 『Snow Crash』에서 처음 소개되었다. 소설 속에서 사용자는 컴퓨터 터미널과 이어폰이 내장된 고글 형태의 일인칭 VR 기기를 통해 메타버스 세계에 접속한다. 이 메타버스는 대규모 사용자들이 동시에 접속하는 형태로 현실 세계와 평행한 개방형 가상공간의 기능을 한다. 사용자는 메타버스에 접속해 걷기와 탈것을 통한 이동에서부터 부동산 취득, 건축 등 사회적 활동을 수행한다. 사이버 가상 경제체계를 완성한 세컨드 라이프(Second Life) [19]와 하나의 아이디로 여러 가상 세계를 체험할수 있는 로블록스(Roblox) [20], 네이버 제페토[21]는 메타버스를 지향하는 대표적인 플랫폼이다.
최근 ICT, CPS, Digital twin 등과 같은 4차 산업 혁명의 기반이 되는 기술의 통합을 통해 메타버스의 실현 가능성이 점점 가시화되고 있다. 여러 연구기관 또는 표준 단체에서 메타버스 구현을 위한 연구들이 수행되었으며[22-24], 공통적인 메타버스의 핵심 필요기능은 다음과 같다[25].
• 육체 및 정신적으로 몰입할 수 있는 현실성
• 단말기를 통해 한 ID로 여러 메타버스를 이용할 수 있는 접근성
• 가상자원 재활용 및 위화감 없는 장소 이동
• 수많은 사용자를 수용할 수 있는 서버 자원
여러 네트워크에 다양한 메타버스가 존재하고 다수의 사용자가 평등하게 이들 사이를 위화감 없이 이동하기 위해서는 성능 한계를 극복할 수 있는 초성능 컴퓨팅 실현 기술이 필요하다. EdgeCPS는이러한 기술적 요건을 충족시켜줄 수 있는 플랫폼으로 메타버스의 요소기술인 1) 실감형 메타버스와 2) 가상-실세계 기반 실시간 시뮬레이션 기술을 위해 사용될 수 있다.
활용 사례 1: 메타버스 멀티모달 인터랙션
메타버스를 표방하는 로블록스, 네이버 제페토와 같은 플랫폼들은 메타버스를 위한 여러 요소를 구현하였지만, 사용자가 실감할 수 있는 현실성은 구현하지 못했다. VR 기반 메타버스 게임 플랫폼인 VRchat [26]은 깊이 이미지 센서를 이용하여 사용자의 실시간 움직임을 게임에서 동기화할 수 있다. 그러나 더 높은 실감을 위해서는 촉각과 같은 멀티모달 정보가 실시간으로 연동되어야 한다. 이러한 수요를 바탕으로 최근 메타(구 페이스북)에서 공개한 햅틱 장갑[27], 마이크로소프트에서 발표한 햅틱 장비인 x-rings[28] 등 감각을 전달하기 위한 여러 가지 장비들이 공개되고 있다. 사람은 촉각을 1ms 단위로 구분할 수 있으므로 메타버스에서 상호작용이 발생했을 때 서버에서 전달되는 멀티모달 정보의 지연은 1ms 미만이 되어야 하며, EdgeCPS는 디바이스 근접 위치에서 서비스를 처리하여 이러한 초저지연 데이터 전달을 가능하게 해 줄 수 있는 기술이다.
활용 사례 2: 가상-실세계 실시간 시뮬레이션
메타버스 플랫폼은 사용자에게 여러 가상 세계를 체험할 수 있는 기능을 제공한다. NVIDIA사는 사이버 공간을 쉽게 모델링할 수 있는 ‘Omniverse’ 라는 플랫폼을 제시하여[29] 분리 구축된 여러 가상 세계를 연결하고 통합하고자 한다. BMW에서는 이 플랫폼을 활용하여 자사의 공장을 디지털 트윈 기반 가상 공장으로 시뮬레이션한다. 가상-실세계가 강하게 동기화된 메타버스는 공장을 실시간으로 모니터링이 가능하며 공정 오류 발생 시 원인이 되는 곳을 쉽게 찾아낼 수 있다. EdgeCPS는공장에서 발생하는 대규모 데이터를 실시간으로 처리하고 지리상으로 멀리 떨어진 환경과 초저지연 동기화가 가능해 기존 클라우드에서 충족시키지 못했던 성능을 극복할 수 있다.
Ⅴ. 결론
본고에서는 기존 기술의 한계로 폭넓게 활용되지 못했던 단순 센서 및 저사양·저자원 디바이스를 가상화된 증강 디바이스로 연계하여 고성능 인공지능 기술을 지원하는 EdgeCPS 플랫폼에 대해 소개하고 관련 기술 동향을 살펴보았다. EdgeCPS 플랫폼 기술은 단순한 시스템 기술이 아니기 때문에 적용 대상 도메인을 철저히 분석하여 사전 구축 계획을 세워야 하는 등 他산업과의 연계성이 매우 높은 기술로 유·무선통신을 적극적으로 활용하는 스마트팩토리, 미래형 국방, 군집 로봇, 스마트시티, 자율주행 자동차 등 다양한 분야에 활용 가능한 기술이다. EdgeCPS 기술은 해외에서도 유사한 연구를 시작하는 단계로 국내에서 개발한 기술을 통해 IPR 확보 및 시장 선점을 추진하고, 도메인 전문 기업과의 협업을 통한 다양한 분야의 레퍼런스를 개발하여 상용화 및 혁신 서비스 개발을 선도하고자 한다.
향후 ETRI에서는 EdgeCPS 플랫폼을 활용하여 사용자 체감 품질을 극대화할 수 있는 초근접 AI 서비스 모델을 개발하여 기존 산업의 활성화뿐만 아니라 창의적인 아이디어를 가진 국민의 새로운 서비스 창출·창업을 통한 신산업 육성 및 신규 고용 확대를 지원할 것이다.
용어해설
EdgeCPS 디바이스 자원 한계를 극복하기 위해 가상화된 저사양 디바이스를 서버자원융합형 고성능 가상디바이스로 구성하여 지능형 서비스를 제공하는 초성능 시스템 기술(Device to the Edge)
약어 정리
S. Nastic and S. Dustdar, "Towards deviceless edge computing: Challenges, design aspects, and models for serverless paradigm at the edge," in The Essence of Software Engineering, Springer, Cham, Switzerland, 2018, pp. 121-136.
C. Paul et al., "The rise of serverless computing," Commun. ACM, vol. 62, no. 12, 2019, pp. 44-54.
A. Khandelwal, A. Kejariwal, and K. Ramasamy, "Le Taureau: Deconstructing the serverless landscape & a look forward," ACM SIGMOD, 2020, pp. 2641-2650.
김영주, 김태호, "임베디드 디바이스에 적용 가능한 부분 학습 기반의 실시간 손글씨 인식기," 한국정보통신학회 논문지, 제24권 제5호, 2020, pp. 591-599.
Y. Bengio, "From system 1 deep learning to system 2 deep learning," in Proc. Int. Conf. Neural Inf. Process. Syst. (NeurIPS), Dec. 2019.
김영주 외, "원활한 인공지능 응용 수행을 위한 EdgeCPS 기반의 지식 공유 미들웨어 구축 방안," IEMEK Symp. Embed. Technol., (Jeju, Republic of Korea), May 2021.
ISO/IEC JTC 1/SC 29, "Coding of audio, picture, multimedia and hypermedia information," 1991, https://www.iso.org/committee/45316.html
D. Frey et al., "Solipsis: A decentralized architecture for virtual environments," in Proc. Int. Workshop Massively Multiuser Virtual Environ., (Reno, NV, USA), Mar 2008.
J.D.N. Dionisio et al., "3D virtual worlds and the metaverse: Current status and future possibilities," ACM Comput. Surv., vol. 45, no. 34, 2013.
E.J. Gonzalez et al., "X-rings: A Hand-mounted 360° shape display for grasping in virtual reality," in Proc. Annu. ACM Symp. User Interface Softw. Technol. Oct. 2021.
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.