동적/비정형 환경의 로봇 이동지능 기술 동향
Technical Trends of Mobile Robot Intelligence in Dynamic and Unstructured Environments
- 저자
-
조현규로봇작업지능연구실 hkcho@etri.re.kr 유원필로봇작업지능연구실 ywp@etri.re.kr 임을균로봇작업지능연구실 eg_lim@etri.re.kr 송수환로봇작업지능연구실 soohwansong@etri.re.kr
- 권호
- 37권 6호 (통권 199)
- 논문구분
- 인공지능 응용 및 고성능 컴퓨팅
- 페이지
- 23-31
- 발행일자
- 2022.12.01
- DOI
- 10.22648/ETRI.2022.J.370603
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- Mobile robot intelligence refers to planning the path of robots to move indoors and outdoors and establishing a physical action plan that can be driven safely and smoothly according to the surrounding environments’ structures. This report introduces technical issues in mobile robot intelligence. Furthermore, we describe the latest mobile intelligence technology of four-legged walking, logistics, and agricultural robots. Finally, we discuss mobile robot intelligence research prospects and its potential for solving real-world problems.
Share
Ⅰ. 서론
로봇 이동지능은 주위 환경에서 수집된 상황인식 기반의 로봇 작업순서를 결정하는 로봇 작업지능과 달리 실내외 환경에 따라 로봇이 이동하는 경로를 계획하고 노면 형태에 따라 안전하고 효율적으로 로봇을 이동시킬 수 있는 구체적인 행동계획을 수립하는 것을 말한다. 로봇의 이동지능이 거리나 시간의 측면에서 최적일지라도, 인간의 이동패턴과 너무 상이한 경우에는 이용자의 불편함을 초래할 수 있다. 인간의 생활공간에서는 로봇이 움직이거나 이동하기가 어려운 계단이나 홈, 턱 등과 같은 비정형적인 장애물이나 평지가 아닌 험지나 미끄럼이 심한 지역 등도 있을 수 있으므로 인간의 생활공간에서 작동하는 로봇들은 안정적인 자세와 노면 상태의 변화에 따라 제어될 수 있는 학습력이 요구된다. 해당 기술들은 IT 기술을 바탕으로 로봇의 환경 인식, 정보 획득, 지능적 판단, 자율적인 행동 등의 인공지능 기술을 이용하여 인간을 지원하고, 복잡하고 다양한 외부환경에 대처하기 위해 사람의 노력을 대체할 수 있는 인공지능 및 전자정보 기술 등 정보통신 기술을 바탕으로 인간과 상호작용하면서 가사 지원, 교육, 엔터테인먼트, 의료지원 서비스 등 다양한 형태의 서비스들을 제공하는 인간 지향적인 로봇의 기능을 갖출 수 있다.
자율주행 이동 및 배달 서비스 로봇도 공간마다 로봇 이동지능이 상이하다. 제조 현장에서는 여러 가지 재료를 배송해 주는 다양한 물류 작업처리가 요구되며, 하역장에서 생산 설비에 이르는 반복적으로 발생되는 물류 프로세스가 빈번하게 일어난다. 로봇 이동지능 기술은 이러한 다양한 형태의 물류 현장에서 효율적인 처리를 위해 필수적인 기술로 드러나고 있다. 또한, 실제 제조 현장에서는 생산성 제고를 위해 로봇이 원활하게 이동할 수 있는 전용 설비로, 천정이나 바닥에 랜드마크용 장치를 매립한다거나 부가 장치를 공장 내 부착하는 것이 가능하다.
농업용 로봇의 경우는 전통적인 농기계가 AI 및 관련 센서 기술이 발전함에 따라 자율주행 및 정밀 농업 형태로 발전하고 있고, 자율주행이나 자율작업을 기반으로 다양하게 수집된 각종 데이터를 이용하여 제어되는 ICT 융합 농기계 로봇으로 성장하고 있다. 특히 농업로봇의 이동지능 분야에서는 자율주행 및 자율작업 트랙터 로봇이 기술적 화두로 떠오르고 있는데, 이는 노동비용과 농산물 생산성, 부가가치, 작업 여건 및 생산 환경 개선 등 농업 환경 변화에 따른 자율작업 트랙터 도입 시 비용 대비 효과 측면의 이점이 부각되면서 신규 도입 가능성이 점차 확대되고 있다.
그러나 국내 농기계 로봇의 경우 국내 농작업 형태에 따라 트랙터와 작업기가 한 세트로 제작, 판매되고 있으므로 작업 형태와 방법이 상이하여 작업기 교체가 빈번히 발생할 경우, 그때마다 전체 통신 시스템을 새롭게 개발해야만 한다. 중국이나 북남미, 유럽 등과 같이 대규모 농업기반의 농작물 생산을 하는 지역으로 국내 농작업 기계를 수출하기 위해서는 ISO 11783에 근거한 트랙터와 작업기 간의 국제 통신표준인 ISOBUS 탑재가 필수적인 상황이다.
본고에서는 로봇 이동지능 분야에서 기술적 이슈들을 점검하고, 4족 보행로봇과 물류로봇, 농업로봇에 관한 최신 기술 흐름과 동향을 살펴보고, 로봇 이동지능 관련 공간 표준화 동향에 대해 정리하였다.
Ⅱ. 로봇 이동지능의 기술적 이슈들
보행로봇의 성능은 최근 상당 수준까지 향상되었으나, 동적/비정형 환경에서 이동이 필요한 지형에 관해서는 3차원 공간인식이나 이동지능에 대한 기술적 해결책이 필요하다. 특히, 보행로봇이 지면에 발을 디딜 때 발생하는 충격으로 인해 센서의 측정치가 부정확해지며, 미끄러짐이 자주 발생하는 야지 환경에서 강인하게 작동할 수 있는 공간인식 알고리즘은 부재하다. 모터 등 로봇 플랫폼 하드웨어의 성능은 운동을 만들어내기에 충분하나, 운동 플래닝 알고리즘과 보행 제어 알고리즘은 개발되지 않은 상황이다. 현재는 연구자가 수동으로 운동을 디자인하거나 디자인된 운동을 부분적으로 수정하여 적용하고 있다.
노지나 험지와 같은 동적/비정형 환경에서 보행로봇의 성능을 시험하기 위한 실제 적용사례는 없다. 따라서, 비정형의 험준한 지형이나 로봇의 기구학적 한계(Kinematic Limit)를 벗어나는 크기의 장애물에 대한 극복이 필요하며, 이와 같은 환경하에서 보행로봇 기술이 개발되면 운동 플래닝, 3차원 환경공간인식, 강화학습, 모델 예측제어기 알고리즘과 같은 핵심 소프트웨어의 비약적인 성능향상에 기여할 수 있으며, 알고리즘이 적용될 보행로봇 하드웨어 플랫폼의 지속적인 발전을 유도하고, 보행로봇의 실현장 적용 및 실제 운용자의 유용성 평가를 통해 효율성 검증을 확보할 수 있다.
보스턴 다이나믹스(Boston Dynamics)는 2족 보행로봇 아틀라스(Atlas)를 이용하여 장애물 점프 및 공중제비를 수행하는 등 보행로봇 제어 기술의 진일보를 이루었다. 아틀라스 로봇은 성능 개선된 커스텀 유압 시스템으로 구동되는 로봇으로 각 관절의 고출력 힘 제어가 가능하고 운동성능을 극한으로 끌어 올리기 위해 로봇의 동역학과 제약조건을 고려하여 자연스러운 동적인 움직임을 만들어 낼 수 있는 궤도 최적화 알고리즘을 개발하였다. 개발된 궤도 최적화 알고리즘으로 만들어 낸 다양한 동적인 움직임의 모션 라이브러리(Motion Library)는 모델 예측 제어기를 이용하여 안정적이고 강인하게 로봇시스템을 개발하였다.
이 기술은 환경인식 기술과 접목되어 쉽게 극복할 수 없는 장애물이 있을 때, 이를 실시간으로 인식하여 장애물 극복에 필요한 움직임을 모션 라이브러리에서 추출 후 이를 수정하여 장애물을 극복하는 수준까지 기술발전이 이루어졌다. 보스턴 다이나믹스는 이러한 기술을 이용하여 장애물의 구성이 달라지거나 높이가 바뀔 때도 이를 실시간으로 인식하여 안정적이고 빠르게 극복할 수 있는 데모를 구현하였다.
일반적으로 학습기반제어기(강화학습)는 학습 과정에서 경험한 상황(State)에서만 효과적으로 로봇을 제어할 수 있으며, 수많은 경험을 쌓아 다양한 상황을 극복할 수 있는 제어기를 설계할 수 있으나, 경험하지 못한 상황에 대한 행동은 학습기반제어기로부터 기대할 수 없다. 따라서 이를 해결하기 위한 기술적 해결책이 필요하다.
모델 예측제어기는 매 상황마다 최적화 알고리즘을 통해 최적의 선택을 하므로, 일반적인 학습기반의 제어기들과 달리 경험해보지 못한 상황에서도 최적의 선택을 할 수 있고, 다양하고 민첩한 동적인 움직임의 제어에도 성능이 검증된 알고리즘이지만, 가격함수, 로봇과 환경의 모델, 발 착지점 계산 알고리즘, 발 접촉 패턴 등은 제어기 설계자가 선택하고 휴리스틱(Heuristic) 방법론으로 튜닝해야 하는 파라미터이므로, 한번 정해지면 제어기 실행 중에는 잘 바꾸지 않는다. 따라서, 상위단의 강화학습알고리즘으로부터 여러 파라미터 및 조종 값을 받을 수 있는 모델 예측제어기를 설계하고, 다양한 모델 예측제어기와 강화학습 제어기의 구조 및 학습 방법에 대한 연구를 수행할 필요가 있다[1].
자퀴와 연결된 모터를 제어하여 이동하는 모바일 로봇(Mobile Robot)의 경우 슬램(SLAM) 기술을 기반으로 자율주행을 수행한다. 슬램 기술은 로봇에 장착된 센서로부터 주변 환경에 대한 지도를 작성하고 동시에 작성된 지도 정보로부터 로봇의 위치를 추정하는 기술이다. 모바일 로봇은 작성한 지도 정보로부터 주행 가능 도로를 판단하고 목적지까지의 이동 경로를 계획한다. 로봇이 계획한 경로를 따라 이동 중에 장애물을 감지하면, 실시간으로 회피 경로를 생성하여 충돌을 방지한다.
슬램 기술에 관한 연구는 오랫동안 활발하게 진행되고 있지만, 여전히 실제 적용에는 많은 어려움이 존재한다. 물류 및 제조현장에서 로봇은 정밀한 작업 수행을 위하여 오차 ±1cm/±1° 이하 높은 정확도의 위치 인식 성능을 가져야 한다. 하지만 물류 및 제조환경에서는 지도가 지속해서 변하기 때문에 로봇의 정확한 위치를 추정하기가 어렵다. 이 문제를 해결하기 위하여 바코드, RFID 태그, 레이저 반사판 등 인공표식물을 바닥 면 또는 벽면에 부착하여 고정된 랜드마크 기반의 지도를 생성하고, 이를 기반으로 위치 인식을 수행하는 방법이 활용된다. 최근에는 정밀한 3차원 라이다(LiDAR) 센서를 활용하여 인공표식물 대신 고정된 자연표식물을 감지하여 위치 인식을 수행하는 연구가 활발히 진행되고 있다. 이 기술을 활용하면 인공표식물의 설치 및 유지보수 등 기존 기술의 한계를 극복할 수 있다.
식당이나 쇼핑몰과 같은 상용 공간에서 운용되는 서비스 로봇의 경우에는 주변에 움직이는 사람이 많이 존재하기 때문에 정확한 위치 추정을 하기 어렵다. 센서의 시야를 가리는 상황이 빈번히 발생하며, 센서로부터 주변 환경정보를 감지하기가 어렵다. 이를 해결하기 위하여 로봇의 시야를 가리지 않는 천장에 인공표식물을 부착하여 위치를 추정하는 방법이 활용되었으나, 천장의 높이가 매우 높거나 없는 경우에는 적용할 수 없다는 문제점이 있다. 그래서 슬램을 활용하여 정확한 위치를 추정하는 방법 대신 대략적인 목표 이동 지점과 방향만을 인식하고 즉각적인 회피주행 경로를 결정하여 목적지까지 이동하는 방법이 연구되고 있다. 사람을 포함하여 움직이는 물체와 충돌이 발생하지 않고 주행하는 데이터를 수집하고, 강화학습 기술을 활용하여 로봇의 주행 모션을 생성하는 모델을 학습한다. 이 방법은 깊이 카메라 또는 360도 카메라의 영상 정보로부터 직접 로봇의 이동 경로 및 제어 명령을 생성하기 때문에 정확한 지도 및 위치 정보를 추정할 필요가 없다.
대부분 모바일 로봇은 라이다 센서를 기반으로 슬램과 자율주행을 수행한다. 하지만 배터리 용량, 가격, 유효 탑재량(Payload) 등 여러 제약조건에 의하여 라이다 센서 대신 카메라 또는 스테레오 카메라와 같은 비전 센서만을 사용해야 하는 경우도 발생한다. 비전 센서로부터 획득한 영상 데이터는 날씨, 조명, 왜곡 등 여러 요인으로 하나의 객체가 여러 가지 색 또는 형태로 표현될 수 있다. 그래서 비전 기반 슬램 방법은 라이다 기반 슬램 방법보다 부정확한 위치 인식 및 지도생성 결과를 얻는다. 최근 비전 기반 슬램 기술의 성능을 향상시키기 위하여 IMU 센서 정보와 융합하는 Visual-Inertial-SLAM 방법이 연구되고 있다.
Ⅲ. 로봇 이동지능 기술의 국내외 기술 동향
1. 4족 보행로봇의 이동지능 기술 동향
국외의 경우 스위스 ETH Zurich 대학에서 스핀오프된 애니보틱스(ANYbotics)에서 개발한 세계 최고 수준의 4족 보행로봇 ANYmal은 심층 강화학습 기술을 이용하여 이동 제어를 구현하였다. 이동지능 기술을 구성하고 있는 심층 강화학습 기술은 최근 물리엔진의 발전과 Sim-to-Real Gap(시뮬레이션과 현실의 간극)을 줄일 수 있는 여러 방법의 제안으로 실제 로봇에 구현되기 시작하였다. 특히 ANYmal은 안정성 위주의 보행에서 탁월한 기술을 자랑하고 있고, 최근 Science Robotics 논문에서는 상당한 거리의 알프스 하이킹 코스를 보행으로 주파한 적이 있다. 다만 전반적인 내비게이션 관련 조종은 아직까지 사람에 의존하는 것으로 조사되었다.
MIT, 미시간 대학, 오레곤 대학 등은 전통적인 모델 예측제어기를 사용한 4족 보행에 탁월한 성능을 보이고 있는데, 이는 단순한 실내 환경뿐만 아니라 동적/비정형적인 야외 환경도 포함하고 있다. 최근에는 Meta(구, Facebook)나 Google, NVIDIA도 4족 보행로봇 기술 연구에 뛰어들어 성과를 내고 있으며, 이들 실리콘 밸리 IT 기업들은 인공지능, 강화학습 및 자율주행 등 다양한 알고리즘을 보유하고 있는 것으로 파악되었다.
국내의 경우 (주)레인보우 로보틱스(Rainbow Robotics)에서 자체 개발한 4족 보행로봇이 있는데, 복잡한 지형을 보행할 수 있는 기술과 외부 충격에 강한 보행제어 알고리즘을 특징으로 가반하중은 3~4kg까지 가능하지만, 라이다 센서나 비전 센서 등을 탑재하지 않은 제품으로 공간인식이나 이동지능을 할 수 없고 다만 리모컨을 통해 사람이 조작하는 수준이다. (주)에이딘 로보틱스(Aidin Robotics)에서 자체 개발한 4족 보행로봇의 경우 무게 약 43kg, 12축 모터, 2대의 Intel PC를 갖춘 사양을 가지고 있으며, 16cm의 계단을 극복할 수 있고, 4.32km/h의 최대 보행속도를 보인다. 기본적인 보행 기능은 탑재하고 있으나, 비전 센서를 통한 인지 지능보행 기술은 확인되지 않고 있다.
현대자동차그룹이 2020년 12월 미국의 보스턴 다이내믹스를 인수 후 스팟(Spot) 4족 보행로봇을 활용한 첫 번째 프로젝트로 2021년 9월에 ‘공장 안전 서비스 로봇(Factory Safety Service Robot)’을 공개하였다. 이것은 현대자동차그룹 로보틱스랩에서 자체 개발한 인공지능 기반 ‘AI프로세싱 서비스 유닛(AI 유닛)’을 탑재하여 주변 환경 데이터를 축적하여 로봇 시스템을 최적화한 후 산업현장의 위험을 감지하고 안전을 책임지는 기능을 담당하며, 기아 광명 공장 실현장에서 시범운영을 시작하였다. 이 기술은 라이다 센서, 단안 카메라, 열화상 카메라 등 여러 센서로부터 획득한 데이터를 딥러닝 모델로 처리하여 주변 환경정보를 인식한다. 주변 환경정보로부터 외부인 무단침입 감지, 고온 위험 감지, 이상 상황 감지와 같은 높은 레벨의 인식이 가능하다. 또한, 자체 내장된 통신모듈은 관제시템과 연결되어 로봇의 원격 조종이 가능하고, 이를 통하여 산업현장에 대한 감시, 정찰이 가능하다.
2. 물류로봇의 이동지능 기술 동향
최근 물류 산업의 확대로 대규모 물동량을 빠르고 효율적으로 처리하기 위하여 창고 관리 및 물류 이송작업의 자동화에 대한 필요성이 증가하고 있다. 그래서 물류창고 관리 시스템(WMS: Warehouse Management System)과 더불어 물류 이송 로봇에 대한 수요도 함께 증가하고 있다. 물류 이송 로봇의 대표적인 사례로 아마존 로보틱스(Amazon Robotics)의 KIVA 로봇이 있다. KIVA 로봇은 물품이 들어있는 선반을 들어 올려 작업자가 있는 공간으로 이동하고, 작업자는 선반 내에 물품을 찾아서 배송한다. 아마존 물류창고에는 수천 대의 KIVA 로봇을 운용하여 하루에 수백만 건의 주문을 처리할 수 있다.
인비아 로보틱스(inVia Robotics)도 다수 모바일 로봇을 활용하여 물류 자율 이송 기술을 개발하였다. 인비아 로보틱스는 모바일 로봇에 석션(Suction) 펌프가 장착된 리프트를 설치하여 선반 대신 물품이 들어있는 상자를 집어 배송한다. MiR(Mobile Industrial Robots)과 오므론(Omron)은 물류 이송이 가능한 자율주행 모바일 로봇(AMR: Autonomous Mobile Robot)을 개발하였다. 물류창고 바닥에 마커를 장착하여 특정 라인만을 따라서 이동하는 AGV(Automatic Guided Vehicle)와는 다르게 AMR은 내장된 환경인식 센서와 SLAM(Simultaneous Localization And Mapping) 기술을 활용하여 자율 충돌을 회피하며 목적지까지 주행할 수 있다. 로커스 로보틱스(Locus Robotics)도 물류 이송 AMR인 LocusBot을 개발하였다. LocusBot은 다른 로봇들과는 다르게 사람과 같은 공간에서 협업하여 오더 피킹(Order Picking) 작업을 수행한다. 사람이 주문받은 물품을 픽업하여 로봇에 장착된 바구니에 담으면 로봇이 목적지까지 이동하여 물품을 운반한다.
로봇의 오더 피킹 작업 이외에도 팔레트 단위 화물 자율 이송 및 상하차를 위한 물류로봇도 개발되었다. AAT Automation, Toyota, Geek plus, Seegrid, Bluebotics 등 상당수 물류 자동화 로봇업체가 스태커 로봇(Stacker Robot)과 AGF(Automated Guided Forklift)를 개발하여 물류 현장에 적용하였다. 다른 물류 자동화 업체는 물류 저장 공간 내부에서 로봇을 운용할 수 있도록 설계하여 저장 공간을 크게 확장하였다. Swisslog의 Autostore는 상자 단위로 물류를 조밀하게 저장하는 공간을 구성하고, 로봇들이 해당 공간 위를 이동하면서 상자 이송작업을 수행한다. Vanderlande의 Adapto 시스템은 물류 저장 공간 내부에 랙(Rack) 사이를 이동하는 선로를 설치하고, 로봇이 선로 사이를 이동, 물류를 이송하는 시스템을 개발하였다.
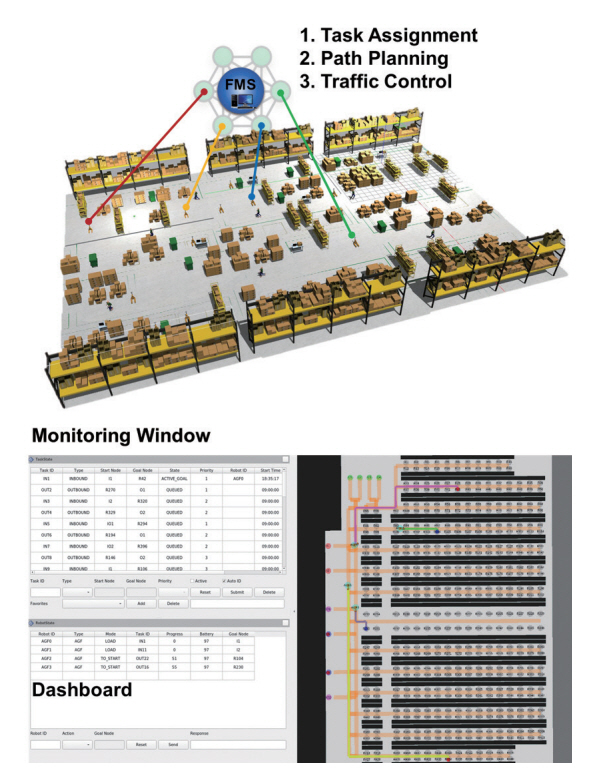
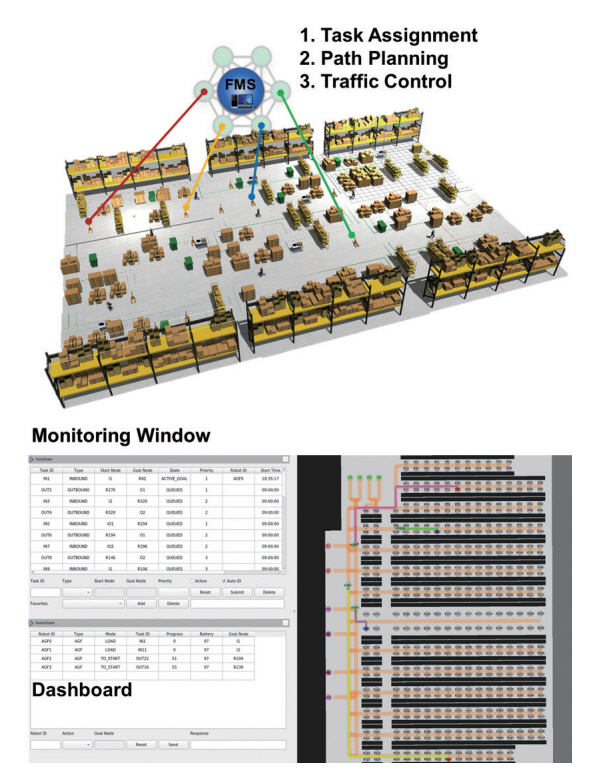
앞서 소개한 다수 물류 이송 로봇들을 총괄 관리하기 위해서는 로봇 편대 관리 시스템(FMS: Fleet Management System)이 필요하다. FMS는 로봇들과의 네트워크 통신을 유지하면서 로봇들이 서로 충돌 없이 물류 이송작업을 수행하도록 제어한다. 구체적으로 FMS는 사용자로부터 입력받은 작업(팔레트/박스의 운반)을 특정 로봇에게 할당하고 할당된 작업을 수행하기 위하여 다중 로봇들의 경로를 계획하며 계획한 경로를 충돌 없이 이동할 수 있도록 교통제어를 수행한다. KIVA, 인비아 로보틱스, MiR, 오므론, 로커스 로보틱스, Bluebotics 등 모두 개발한 로봇을 운용하기 위한 FMS를 지원한다.
ETRI 본 연구실에서도 다양한 물류 환경에서 효과적으로 로봇 운영이 가능한 새로운 FMS를 개발하였다. 개발 FMS는 그림 1과 같이 위상 지도(Topological Map)를 구성하여 특정 차선을 따라서 로봇이 이동하도록 개발하였다[2]. 그러므로 로봇과 사람이 작업 공간을 공유하는 동적인 환경에서 활용할 수 있으며 다양한 크기 구조의 기존 물류 공간에 효과적으로 적용할 수 있다. 또한, 로봇 주행을 위한 인공표식을 최소화하며 지게차와 모바일 로봇 등 다양한 종류의 로봇에 적용할 수 있다.
3. 농업로봇의 이동지능 기술 동향
대표적인 농기계인 트랙터의 경우, 트랙터의 동력을 이용하는 작업기를 교체하면서 다양한 농작업을 수행한다. ISO 11783 국제표준은 트럭과 트레일러 같은 상용차 관련 표준인 SAE J1939에 기반하여 트랙터와 농림업 작업기 간의 연결을 표준화한 것으로서, 유럽과 미국 등의 농기계 선도업체들이 2001년부터 관련 제품을 출시하고 있다. ISOBUS라 고도 하는 이 국제표준은 SAE J1939에 정의된 센서와 액추에이터 관련 메시지를 포함하며, 고유의 트랙터 정보/제어 메시지와 트랙터에 연결된 작업기의 조작화면 표시를 위한 정보표시장치(VT)와 작업 기록을 위한 정보저장장치(FS) 그리고 농경지 정보 등을 제공하는 농장경영정보시스템(FMIS) 또는 모바일작업기제어시스템(MICS)과의 정보교환을 다루며, 트랙터 운행 중의 복잡한 농작업을 다루는 작업 제어기(TC) 등도 정의한다[3].
14개의 파트로 구성된 ISO 11783 표준문서와 ISOBUS 11783 Online Data Base에서 대기, 주행속도, 자세, 습도, 관성, 토질 관련 센서 및 메시지들이 검색되지만, 이동지능 관련해서는 GPS, DGPS, GNSS와 ‘automatic guidance’와 ‘automatic steering’ 정도만 검색된다.
구체적으로는 N클래스의 트랙터-작업기 인터페이스는 GPS, DGPS 등의 네비게이션(Navigation) 정보를 작업기 버스에 제공할 수 있으며, TECU 버전 2 이상의 G클래스의 경우에 guidance(Steering) system을 트랙터에 장착하면 곡률 등의 guidance 관련 제어와 모니터링과 관련된 모든 파라미터를 제공하고, P클래스는 트랙터 주행속력의 제어와 모니터링에 관한 모든 파라미터를 제공하므로 트랙터에 연결된 작업기 또는 TC가 트랙터를 직접 제어할 수 있다[4].
트랙터가 주행 시 따라야 할 안내 패턴(Guidance Pattern)은 FMIS 또는 MICS에서 XML로 생성되어 경작지 경계 다각형과 함께 TC에 전송되고[5], 이에 따라 작업자가 수동운전을 하거나 작업기 ECU가 트랙터를 제어한다.
GPS에 기반한 트랙터 부착형 auto steer kit 제품군은 FJDynamics 등에서 시중에 출시하였으며, 점차 ISOBUS를 지원하는 추세이다. 자율주행 관련 ISOBUS 제품 동향은 참고문헌[6]에서 상세히 다루고 있다.
ISO 11783은 제조사 전용 메시지(Proprietary Message)를 허용하지만, 정상적인 동작 시에는 CAN 버스 트래픽의 2%를 넘지 않아야 하는 제약이 있다[7]. 또한, CAN에 기반하여 대역폭이 250kbps로 제한된 현재 ISOBUS의 한계를 넘기 위해서 이더넷 기반의 HSI가 개발되어 2022년 3월에 처음 시연되었으나, HSI 개발범위에 원격관찰을 위한 고압축 고성능 카메라는 포함되어 있지만 영상처리용 카메라 스트림은 범위에서 벗어나 있다.
4. 로봇 이동지능 관련 공간표준화 동향
앞서 소개한 바와 같이 로봇 이동지능을 이용한 자동화 적용사례는 확산 추세이다. 로봇 이동지능을 실제 현장에 구현하기 위해서 위치인식, 지도작성, 경로계획 및 제어 등 다양한 기술요소를 통합운영해야 한다[8]. 특히 물류로봇, 농업로봇과 같이 공간인지가 중요한 응용의 경우 작업공간에 대한 체계적인 표현이 필요하다. 또한, 다양한 공간구조와 로봇 종류, 서비스에 포함되는 로봇제어 시스템을 고려하여 상호 호환이 가능하고 공통된 규격에서 운영이 가능한 표준적인 공간표현이 필수적이다.
현재, 로봇공간의 표현은 2차원 공간에 대한 지도 데이터 표현(MDR: Map Data Representation) 표준이 개발되어 실현장에 적용되기 시작하였다[8]. 해당 지도규격은 2차원 실내외 환경을 대상으로 공간을 표현하며 크기와 구조에 대한 제약이 없다.
최근 국내에서 해당 표준의 일부 규격을 현실화하여 단체표준으로 제정을 완료하였다[9].
MDR 표준은 로봇 이동지능을 구현하기 위한 다양한 맵핑 방식을 포괄적으로 지원하는 것으로 크게, 수치(Metric) 지도와 위상(Topological) 지도로 데이터 모델을 구분한다. 수치 지도의 경우, 이산(Discrete) 지도와 연속(Continuous) 지도로 나뉜다. 전자는 현장에서 흔히 사용하는 격자(Grid) 지도이며, 후자는 공간을 점, 선, 면의 기하(Geometric) 요소로 표현하는 기하 지도이다.
지도데이터의 상호교환을 위해 MDR 표준에서는 XML 스키마를 정의하여 지도의 유효성 검사에 사용하고 있다. MDR 표준에 기반하고 실제 현장의 요구사항을 반영한 국내 포럼표준을 적용하여 실제 물류 현장의 공간을 표준데이터모델로 표현할 수 있다[10].
한편, 최근에는 MDR 공간표현모델을 3차원으로 확장한 표준규격의 개발이 진행 중이다(이하, 3D-MDR).
특히, 농업, 국방, 건설 등 다양한 3차원 작업공간을 표현할 수 있도록 규격이 설계되었다. 기존의 MDR 표준과는 다르게 지도데이터의 상호교환을 위해 JSON 스키마를 정의하였다. 3D-MDR에서 다루는 지도데이터 모델은 기존 MDR 표준의 지도데이터 표준과의 호환을 위해 동일한 지도데이터 모델을 사용한다[8].
최근에는 IEEE를 통해 기존의 2D, 3D MDR 표준규격과 호환되면서 공간인식 결과를 표현할 수 있는 시맨틱 지도규격에 대한 표준개발이 착수되었다[11]. 지도는 로봇 이동지능의 구현에 있어서 표준플랫폼 역할을 하는 것이다.
따라서 향후에 시맨틱 지도규격까지 완성된다면, 물류, 농업, 건설, 국방, 서비스 등 다양한 산업현장에서 로봇 이동지능의 구현이 촉진될 것으로 기대할 수 있다.
Ⅳ. 결론
동적/비정형 환경에서 자율적 이동이 가능한 로봇 이동지능 플랫폼의 개발은 전자, 기계, ICT, SW 기술융합을 통해 중소, 중견 기업의 요소기술 개발 역량을 강화시킬 수 있으며, 지능으로서의 SW 플랫폼과 보행로봇이라는 HW 플랫폼의 유기적 결합을 통해 개발된 기술의 검증작업을 수행하고 이것을 바탕으로 다양한 분야로 확장할 수 있을 것이다.
로봇 이동지능 기술은 일반 야지 환경, 물류 환경, 농업 환경, 재난 상황 등 다양한 산업 환경으로 확대 적용되는 핵심 기반 기술이 될 수 있으므로, 학습된 로봇 이동지능 기술의 연구 플랫폼은 비전이나 자연어처리, 사람-로봇 인터랙션 등과 같이 다양한 기초 연구 분야에도 활용될 수 있는 잠재력을 가지고 있다.
예측이 어렵고 기술적 난이도가 높은 동적/비정형 환경에서의 로봇 구현은 로봇 하드웨어 기술, 궤도 최적화 기술, 움직임 제어 기술, 환경 인식 기술 등이 효과적으로 융합되어야만 실현될 수 있는 기술이다. 현재 국내 기술의 경우 아직 선행 연구 단계에 머물고 있는 수준이므로 미국이나 유럽과 같은 선진 기술과의 격차를 좁히기 위해서는 적극적이고 장기적인 노력과 투자가 필수적으로 수반되어야 한다.
용어해설
CAN 차량 내에서 호스트 컴퓨터 없이 마이크로 컨트롤러나 장치들이 서로 통신하기 위해 설계된 표준 통신 규격
ISOBUS ISO 11783에 정의된 농업과 임업용 트랙터와 작업기간의 직렬제어와 통신 데이터 네트워크에 대한 표준규격
Kinematic Limit 기구학적 한계라는 뜻으로 근육의 길이와 근력의 관계에 따른 해당 객체의 움직임의 한도 수준을 의미
LiDAR 레이저 펄스를 쏘고 반사되어 돌아오는 시간을 측정하여 반사체의 위치 좌표를 측정하는 레이다 시스템
Motion Library 장비 프로그래밍은 MS Windows 상에서 프로그래밍하는 윈도우 프로그래밍이 주종을 이룸. 프로그래밍 툴에는 Visual C++, C++ Builder, Delphi, Visual Basic 등의 다양한 툴이 제공되고 있으며, 이 툴에서 활용 가능한 API 함수
SLAM 동시적 위치추정 및 지도작성의 의미로 로봇공학 등에서 사용하는 개념으로, 임의 공간에서 이동하면서 주변을 탐색할 수 있는 로봇에 대해 그 공간의 지도 및 현재 위치를 추정하는 방법
VT 트랙터 정보/제어 메시지와 트랙터에 연결된 작업기의 조작 화면 표시를 위한 정보표시장치
약어 정리
AGF
Automated Guided Forklift
AGV
Automatic Guided Vehicle
AMR
Autonomous Mobile Robot
CAN
Controller Area Network
DGPS
Differential GPS
ECU
Electronic Control Unit
FMS
Fleet Management System
FS
File Server
GNSS
Global Navigation Satellite System
GPS
Global Positioning System
HSI
High Speed ISOBUS
LiDAR
Light Detection And Ranging
MDR
Map Data Representation
MICS
Mobile Implement Control System
SLAM
Simultaneous Localization and Mapping
TC
Task Controller
TECU
Tractor ECU
VT
Virtual Terminal
WMS
Warehouse Management System
S. Song et al., "Corridor occupancy-based multi-agent pathfinding in topological maps," in Proc. Int. Conf. ICT Convergence (ICTC), (Jeju Island, Rep. of Korea), Oct. 2022.
ISO 11783 Tractors and Machinery for Agriculture and Forestry-Serial Control and Communications Data Network Part 1: General Standard for Mobile Data Communication, 2017.
D.S. Paraforos, G.M. Sharipov, and H.W. Griepentrog, "ISO 11783-Compatible industrial sensor and control systems and related research: A review," Comput. Electron. Agric., vol. 163, 2019, https://doi.org/10.1016/j.compag.2019.104863
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.