AI Bots를 위한 멀티에이전트 협업 기술 동향
Research Trends of Multi-agent Collaboration Technology for Artificial Intelligence Bots
- 저자
-
강동오시각지능연구실 dongoh@etri.re.kr 정준영시각지능연구실 jyjung21@etri.re.kr 이천희시각지능연구실 ch.lee@etri.re.kr 박민호시각지능연구실 roger618@etri.re.kr 이전우시각지능연구실 ljwoo@etri.re.kr 이용주시각지능연구실 yongju@etri.re.kr
- 권호
- 37권 6호 (통권 199)
- 논문구분
- 인공지능 응용 및 고성능 컴퓨팅
- 페이지
- 32-42
- 발행일자
- 2022.12.01
- DOI
- 10.22648/ETRI.2022.J.370604
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- Recently, decentralized approaches to AI (artificial intelligence) development, such as federated learning are drawing attention as AI development’s cost and time inefficiency increase due to explosive data growth and rapid environmental changes. Collaborative AI technology that dynamically organizes collaborative groups between different agents to share data, knowledge, and experience and uses distributed resources to derive enhanced knowledge and analysis models through collaborative learning to solve given problems is an alternative to centralized AI. This article investigates and analyzes recent technologies and applications applicable to the research of multi-agent collaboration of AI bots, which can provide collaborative AI functionality autonomously.
Share
Ⅰ. 서론
인공지능의 연구는 인간과 유사한 지식이나 지능을 가진 컴퓨터나 기계에 관한 연구로 인간의 지식을 인공지능 엔진에 직접 주입하는 하향식 방식과 데이터로부터 인공지능 모델을 형성하여 지능이나 지식을 생성하는 상향식 방식의 2가지로 진행됐다. 이때 인공지능 모델이나 엔진에 지식이나 지능을 주입하거나 생성하고 이를 동작시켜 인공지능 기능을 제공하는 것은 서버나 클라우드와 같은 중앙집 중화된 컴퓨터나 기계 장치에서 수행하였다. 그러나, 최근에 컴퓨팅 장치가 다양해지고 그 수가 폭발적으로 증가함에 따라 인공지능을 만들 때 사용하는 데이터나 지식 및 정보 또한 폭발적으로 증가하여 이를 중앙집중식으로 인공지능에 반영하기에는 비용이나 시간적 측면에서 비효율적인 실정이다. 즉, 엄청난 데이터나 지식을 중앙에 모으는 것과 이것을 컴퓨터의 인공지능에 반영하는 것은 많은 자원이 소모되므로 고비용이다. 더불어 많은 시간이 필요한 작업이어서 변화하는 현실을 빠르게 반영하지 못하므로 인공지능이 발전함에 따라 높아지는 사용자들의 눈높이를 맞추지 못하고 있다.
근래에 분산된 컴퓨팅 자원을 활용하여 지능적인 서비스를 제공하기 위한 컴퓨팅 및 IoT 연구가 진행됨에 따라 탈중앙화된 인공지능 연구가 활발히 연구되고 있다[1-3]. 탈중앙화된 분산방식의 인공지능 기술은 국지적 소규모 정보를 바탕으로 제한된 컴퓨팅 자원을 최대한 효율적으로 사용하여 인공지능을 구성하여 동적 환경에 빠르게 적응하는 최선의 해를 제공함으로써 중앙집중 서버 방식보다 많은 클라이언트에 만족스러운 인공지능 서비스를 제공할 수 있다. 따라서, 분산방식 인공지능 연구의 핵심은 분산된 인공지능을 제공하는 개체가 제한된 데이터, 지식, 경험과 자원을 서로 교류하여 최대한 활용함으로써 최선해를 제공할 수 있게 하는 협업 인공지능 기술이다. 이러한 중앙집중식 AI와 분산 방식 AI를 비교 정리하면 표 1과 같다.
표 1 중앙집중식 및 분산방식 인공지능 비교
| 특징 | 중앙집중식 AI | 분산방식 AI |
|---|---|---|
| 처리 정보 | 전역 대용량 정적 정보 | 국지적 소규모 동적 정보 |
| Client 규모 | 1~1,000 | 10,000 이상 |
| 장점 | 정적 환경 최적해 제공 | 동적 환경 적응 최선해 제공 |
| 단점 | 고비용 및 시간 소모 | 제한된 정보 및 컴퓨팅 자원 |
협업 인공지능 기술은 그림 1에서와 같이 서로 다른 데이터, 지식, 경험, 자원을 보유한 인공지능 에이전트들이 동적으로 협업 그룹을 형성하여 공유된 데이터, 지식, 경험과 더불어 분산자원을 활용한 협업 학습을 통해 강화된 인공지능 모델을 도출해 주어진 문제를 해결하는 분산 협업 방식의 인공지능 기술이다. 협업 인공지능을 제공하고 고도화하기 위한 협업 인공지능 플랫폼은 다음 2가지 기능을 갖추어야 한다.
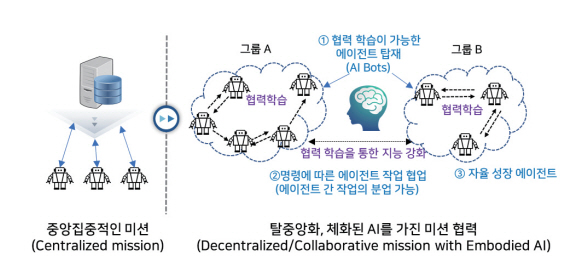
● 주어진 문제를 협업 인공지능을 구성하여 해결하기 위한 멀티에이전트 간의 작업 협업
● 에이전트 간의 지식 교류를 통한 지능 강화를 위한 협력 학습
이에 따라 사용자가 제공받고자 하는 인공지능 기능을 멀티에이전트가 동적인 그룹을 구성하여 협업을 통한 분산된 인공지능 기능을 제공할 수 있는 능력을 구현하여야 하며, 분산방식의 한계인 제한된 정보 및 컴퓨팅 자원 문제를 극복하기 위해 에이전트 간 지식 및 정보를 교류하고 이를 바탕으로 지능을 강화하는 것이 필요하다.
본고에서는 협업 인공지능을 제공하기 위한 기존의 멀티에이전트 협업 기술의 동향을 인공지능 적용 분야에 따라 분류하고, 조사, 분석하여 개선 방향을 제시한다. 이를 위하여 협업 인공지능 기술을 다음의 응용 도메인에 맞춰 관련 기술을 살펴본다.
● 물체 및 공간 인식을 위한 협업 기술
● 분산 행동 지능 협업
● 언어 기반 인간-AI Bots 협업
● 분산 협업 학습
본고 Ⅱ장 1절에서는 AI Bot과 협업 인공지능의 개념을 정의하고, 2절에서는 물체 및 공간 인식을 위한 협업 기술과 관련된 연구 동향을 살펴보고 분석한다. 3절에서는 AI Bot 간 인공지능 기능의 협업을 수행하는 분산 행동 지능의 협업 기술에 대해서 조사 분석하고, 4절에서는 언어를 기반으로 인간과 AI Bot들이 협업하는 기술에 대해서 다룬다. 마지막으로 5절에서는 이러한 협업 지능을 향상시키는 분산 협업 학습 기법들에 사용될 수 있는 최근의 연구에 대해서 살펴본다. Ⅲ장에서는 AI Bots 협업 기술을 적용할 수 있는 협업 인공지능 응용에 대해서 분석하고 기존 사례를 보여준다.
Ⅱ. 협업 인공지능 기술
1. AI Bot과 협업 인공지능
이 절에서는 전체 협업 인공지능 기술을 살펴보기 전에 먼저 AI Bot과 협업 인공지능의 개념에 대해서 정의를 하고자 한다.
가. AI Bot
Bot이란 인터넷 등에서 검색 등의 태스크를 자동으로 수행하는 컴퓨터 프로그램을 의미하며 internet bot, web robot, robot으로도 불린다. 대개 chatbot, spambot, socialbot 등의 태스크를 수행한다. AI Bot은 일반적으로 인공지능 기술을 활용한 chatbot을 의미하며, 보통 Bot들에 비해서 추가로 인간 사용자와 소통에 필요한 자연어 처리 및 이해, Conversational AI 등의 기술이 요구된다[4]. 이 개념을 다양한 인공지능 태스크로 확장한다면 AI Bot을 인간과의 소통을 바탕으로 주어진 목적을 달성하기 위하여 스스로 동적인 환경을 인지하고 의사결정을 내리는 자율적 개체로서 인공지능의 고유 기능인 인식, 추론, 학습 등의 태스크를 수행하는 일종의 에이전트로 해석할 수 있다. 본고에서는 인공지능 기능을 제공하는 가상 및 실제 에이전트를 모두 포함하여 AI Bot을 정의하고 이에 관한 기술 동향을 살펴보고자 한다.
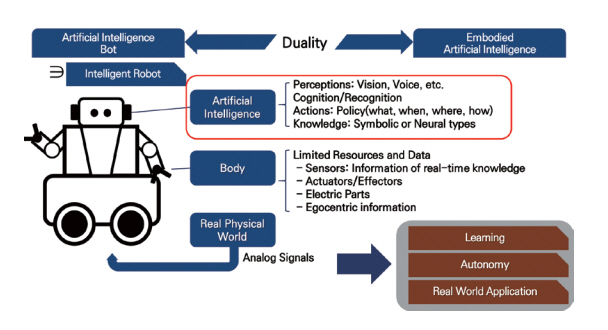
AI Bot 에이전트를 정보의 관점에서 몸체(Body)를 가진 개체로 해석하여 제한된 자원을 가지고 1인칭의 자기 시점(Egocentric) 데이터와 지식, 경험의 정보를 처리하고 행동하는 존재로 정의할 수 있다. 이러한 해석은 chatbot 등의 가상 에이전트뿐만 아니라 로봇 등의 실제 세계의 에이전트에도 적용 가능하며 최근의 체화된 인공지능(Embodied AI) 연구의 관점과 유사하다[5]. 상기의 내용을 그림으로 정리하면 그림 2와 같다.
나. 협업 인공지능
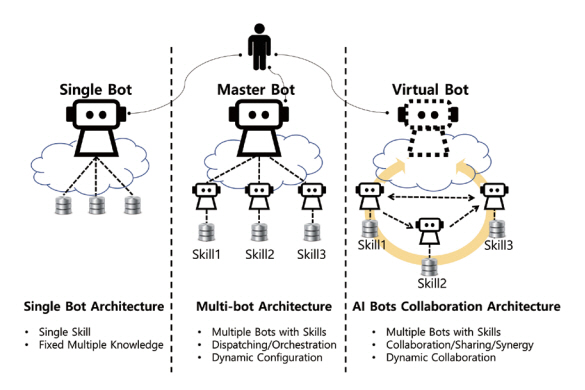
AI Bot 에이전트들은 서로 다른 데이터, 지식, 경험, 자원을 보유하고 있으며, 이들의 협업이 중요하다. 기존의 단일 에이전트 기반의 AI Bot은 인간 사용자와의 소통을 단일 에이전트의 능력(Skill)으로 처리하였으나, 멀티봇의 경우는 복수의 에이전트가 제공하는 능력과 기능을 잘 조율하여서 사용자에게 제공하는 플랫폼 구조가 필요하다. 기존의 인공지능 시스템을 단일체(Monolithic) 컴퓨팅 구조라고하면 AI Bot을 통한 멀티에이전트 협업 방식은 객체 지향이나 모듈식/조립식의 유연성 있는 컴퓨팅 구조로 비유할 수 있다[6].
로봇 분야의 분산지능 연구에서는 복수 에이전트 간의 상호작용 방식에 따라 집합적(Collective), 협력적(Cooperative), 협업적(Collaborative), 조정(Coordinative) 방식으로 분산 인공지능 기술을 구분하였으며, 공통의 목표가 없지만 다른 에이전트의 목표를 추측할 수 있으며 서로 이득을 볼 수 있는 상호작용을 하는 방식을 협업적 방식 분산지능이라고 정의하였다[3]. AI Bots 기반의 협업 인공지능은 이러한 AI-AI 협업 이외에도 인간 사용자와의 소통을 통하여 인간과 AI Bot들의 상호 합의를 통해 AI Bot들이 협업, 참여, 기여, 보상이 이루어질 수 있는 AI-AI 협업 기술을 포함한다[7].
그림 3은 상기의 개념을 적용하여 본고에서 제안하는 AI Bot들의 협업 개념을 도시하고 있다. 복수의 Bot들의 기능(Skill)이 한 번에 한 개가 사용되는 기존의 Multi-bot 구조와 달리 동시에 여러 Bot들이 병렬로 기능을 발휘하여 시너지를 가지는 인공지능 협업 기능을 생성함을 보여주고 있다.
근래에 협업 인공지능과 유사한 탈중앙화 인공지능 기술이 연구되었으며 협업 인공지능에 활용 가능하다. 이 기술들의 협업 인공지능 방식과의 유사점과 차이점을 정리하면 표 2와 같다.
2. 물체 및 공간 인식을 위한 협업
이 절에서는 AI Bot들의 협업에 활용될 만한 기존의 물체 및 공간 인식에 관련된 연구를 살펴보고 협업을 위하여 필요한 사항에 대해서 분석하여 본다.
기존의 분산된 인식 정보를 융합하여 통합 또는 향상된 인식 기능을 제공하는 연구로서 단일 에이전트에서 멀티모달 데이터 간의 지식 교류를 통하여 인식 기능을 향상시키는 멀티모달 학습 연구가 진행되었다[8]. 그러나, 이러한 방식은 중앙집중형의 인공지능 모델에 적합하며, 제한된 컴퓨팅과 통신 자원을 전제하는 협업 인공지능에는 사용하기 쉽지 않다.
NVIDIA는 청각 지능과 시각 지능의 모달 간의 교차 학습을 통하여 개별 지능에 대한 인식 기능을 향상시키는 연구를 진행하였다[9]. 이 연구는 멀티 모달 정보 간의 지식 교류가 많은 통신량이 필요한 Early Fusion 방식이 아니라 상대적으로 적은 통신량이 필요한 Late Fusion 방식으로서 협업 인공지능에 적용 가능하다.
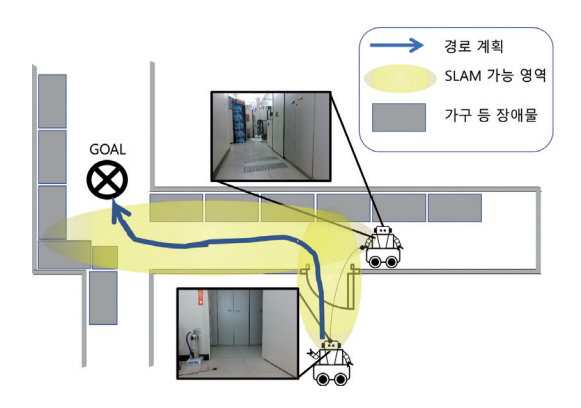
로봇 분야는 제한된 자원을 가지는 로봇에서 인공지능을 구현하여야 하므로 협업 인공지능 기술이 많이 필요한 응용이다. 여러 대의 로봇들이나 드론들이 개별 개체가 보지 못하는 시각 영역을 교류하여 보다 광범위한 정보를 획득하는 연구가 진행되었다. 특히 공간을 인식하는 주요 기능으로 로봇이 자신의 위치와 자세를 파악하고 주변 환경에 대한 정보를 획득하는 SLAM 연구에서 최근에 향상된 공간 상황인지를 위하여 멀티에이전트의 정보를 공유하여 SLAM의 정확도를 향상시키는 분산 SLAM 기술의 연구가 진행 중이다. 전역 정보가 없더라도 이웃한 에이전트 간의 제한된 통신을 통하여 SLAM을 수행하는 방법이 제시되고 있다[10-12]. 더불어 MIT와 스탠포드를 중심으로 카메라의 시각 정보를 단순한 SLAM에만 적용하지 않고 시각적인 장면(Scene)에서 객체 간의 의미론적 관계와 공간적인 관계를 동시에 구축하는 3D 장면 그래프(Scene Graph) 연구에서 멀티에이전트를 활용하는 연구가 진행 중이다[13]. 각 로봇이 실시간으로 로컬 환경의 3D 메쉬(Mesh) 모델을 구축하고 메쉬 각 면에 의미 레이블(예: 건물, 도로, 개체)을 부여한 후 통신 가능한 로봇 간의 궤도 추정 및 자세 추정 최적화 알고리즘을 통하여 보정하는 기술을 개발하였다.
이상에서 살펴본 분산 SLAM 기술들의 특징을 비교하여 표 3에 정리하였다.
표 3 분산 SLAM 기술 비교
| 기술 | 특징 |
|---|---|
| Efficient Decentralized SLAM [10] | 전체가 전역 맵을 공유하지 않고 필요한 로봇에만 정보 교환 |
| DOOR-SLAM [11] | P2P 방식 정보 교환과 인식 예외(Outlier)에 강인한 알고리즘 |
| Swam-SLAM [12] | 다중 로봇 탐사(Exploration) 고려 |
| Kimera-multi [13] | 의사결정 및 공간 인공지능을 가능하게 하는 의미 정보 캡처 |
체화된 인공지능 연구에서도 인식과 관련된 멀티 에이전트의 협업 문제를 다루고 있다. 시뮬레이션 환경에서 복수의 에이전트가 각 에이전트가 보이지 않는 영역을 다른 에이전트의 지식을 활용하여 인지하게 하는 협업 시각적 태스크에서 에이전트끼리 의사소통하는 통신 방법의 학습 연구나 협업적으로 공간을 탐색하는 방법의 연구가 진행되었다[14,15]. 그림 4는 이러한 멀티에이전트가 인식 지식을 교류하는 사례를 보여준다.
인식과 관련된 협업 인공지능 기술은 단일 에이전트에서의 멀티모달 융합 연구가 활발한 것에 반하여 멀티에이전트 관점에서 멀티모달 정보를 활용하는 연구는 드물다. 인식이나 인지의 관점에서 지식이 내재된 센서 신호, 데이터와 더불어 그래프, 규칙과 같은 상위의 지식을 종합적으로 교류하여 협업 인공지능을 제공하는 연구가 요구된다.
3. 분산 행동 지능 협업
분산 행동 지능의 경우는 에이전트들의 개별 행동의 결과로 얻어지는 최종 결과가 만족스럽도록 각 에이전트의 행동이나 의사결정을 수행하는 것이다. 멀티에이전트의 협업을 위하여 작업 분할, 조직 생성, 작업 할당, 작업 수행의 단계를 거쳐 사람의 요구사항을 복수의 에이전트가 수행한다[16]. 이 4가지 수행 단계의 자동화 여부에 따라 멀티에이전트 시스템을 4가지 레벨의 자율성을 정의하여 구분하였으며, 현재는 작업 분할, 조직 생성, 작업 할당의 3가지를 동시에 자동화하는 레벨 4의 이종 복수 로봇 시스템은 없는 상황이다. 멀티에이전트가 조직을 구성하여 작업을 할당하는 방법론으로는 표 4와 같은 것이 있다. 단순하게 미리 규칙을 정해놓고 이에 따라 협업하는 방식부터 경매나 합의 등을 통하여 에이전트들의 기능/성능/자원 등에 맞춰 주어진 임무에 적합한 협업 구성을 정하는 방식, try-and-error 방식으로 이전의 행위 결정에 대한 결과를 학습 데이터로 행위 지능을 학습하는 강화학습 방법 등의 여러 방법이 개발되었다.
표 4 조직을 구성하여 작업을 할당하는 방법론
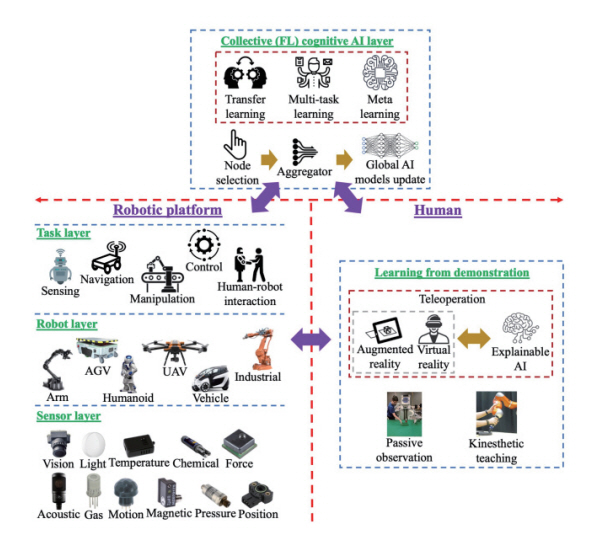
최근에는 체화된 인공지능 연구 그룹에서 복수의 로봇이 가구를 옮기는 동기화된 작업을 위하여 멀티에이전트 강화학습을 통하여 시각적 행동 정책을 시뮬레이션 환경에서 학습하는 방법을 연구하였다[17]. 이러한 전통적인 방법 이외에도 그림 5와 같이 인간의 행동 지능을 로봇 등의 기계에 전달하는 LfD(Learning from Demonstration) 방법을 연합학습 기법으로 구조화하여 인간의 행동 지식을 멀티에이전트 협업에 적용하여 학습하는 연구가 있다[18].
4. 언어 기반 인간-AI Bots 협업
인간과 AI의 협업을 위한 인간-AI 소통 방식은 언어 지시어를 사용하는 언어적 방식과 제스처(Gesture), 시선(Gaze) 등을 통한 맥락이해와 같은 비언어적 방식의 연구가 있다. 본고에서는 이 중 전통적인 언어 기반의 인간과 멀티에이전트 AI 간의 협업 기술에 대해서 살펴본다.
단일 에이전트에서의 언어 기반 인간-기계 협업 연구는 탐색하거나 조작하기를 원하는 관심 대상 객체를 인간의 언어에서 파악하는 것과 같이 사용자의 의도를 파악한 후 사용자가 원하는 태스크를 도출하고 수행하는 방식의 연구들이 진행되고 있다. PDDL과 같은 상위 개념의 계획을 수행하거나 BERT 등을 학습하여 언어 입력을 연속된 행동 계획으로 만드는 방식의 연구가 진행되고 있다[19,20]. 하지만 아직 멀티에이전트에 이러한 연구를 적용하는 것은 미흡하다.
언어 기반으로 인간과 멀티에이전트가 협업하는 연구는 주로 chatbot과 같은 언어 기반 태스크에 연구가 집중되었다. 멀티봇 기반의 chatbot의 경우는 사용자와의 인터페이스가 하나이므로 다양한 기능을 가진 에이전트를 대화에 선택적으로 연결하는 조정(Orchestration) 기능이 중요하다[6]. 사용자와의 대화의 맥락을 유지하도록 에이전트의 역할과 동작을 조율하는 것에 기술의 초점이 있다. 로봇과 같이 실세계에 적용되는 에이전트의 경우는 chatbot의 경우와 달리 에이전트의 출력 결과가 단일하게 사용자에게 전달되지 않고 분산되므로 결과물에 도달하는 계획(Planning)을 수립하는 방법에 대한 연구가 진행되었다[21].
체화된 인공지능의 연구에서는 Vision-and-Language task, Vision-Language Planning 등의 시각과 언어의 융합 태스크 연구가 활발하다[22,23]. 최근에는 멀티에이전트로 해당 연구가 확장되어 복수의 에이전트가 인간의 언어 질문에 3D-CNN과 LSTM을 활용하여 에이전트 간의 작업 분할과 지식 공유를 통하여 응답하고 이를 AI2-THOR 시뮬레이터로 검증하는 연구가 진행되었다[24].
5. 분산 협업 학습
이 절에서는 마지막으로 협업 인공지능을 멀티에이전트의 협업을 통하여 향상시키는 분산 협업 학습에 활용 가능한 연구를 조사한다. 이를 위해 강화학습, 전이학습, 연합학습 관점에서 유사한 연구의 기술 동향을 살펴본다.
강화학습은 행동이나 의사결정의 결과를 반영하여 지식을 학습하고 수정하는 방법으로 멀티에이전트 강화학습 연구가 진행되고 있다[25]. 다수의 에이전트는 학습 단계에서 모든 정보를 공유하여 학습하고, 실행단계에서는 자신의 관측 정보만을 활용하여 행동을 수행하는 방식인 중앙집중형 훈련-분산형 실행(CLDE: Centralized Learning and Decentralized Execution) 구조에 대한 관련 연구가 활발히 진행 중이다. 완전 분산형의 학습은 협업이나 경쟁적 행동을 정책에 반영하기 힘들기 때문에 이러한 중앙집중식 학습을 수행한다. 그런데, 이러한 중앙집중식 학습은 제한된 컴퓨팅 및 통신 자원을 전제하는 협업 인공지능에는 적합하지 않으므로, 에이전트 간 통신을 최적화하는 연구가 진행되고 있다. 구글 딥마인드는 에이전트 행동에 대한 보상 경험을 공유하는 것과 정책 경사(Policy Gradient) 값을 학습하는 과정을 분리하여 대단위 분산 컴퓨팅 자원상에서 강화학습을 가속할 수 있는 기술인 IMPALA(IMPortance weighted Actor-Learner Architecture) 구조를 제안하였다[26]. 또한, 에이전트 간의 통신에 소요되는 자원 문제를 줄이기 위해 에이전트는 개별적으로 actorNet과 메시지 생성 네트워크를 가지지만 criticNet은 공유하는 방식인 Message CoordinatiorNet과 같은 멀티에이전트 통신 효율화 연구가 진행되었다[27].
에이전트 간 전이학습의 경우는 한 에이전트의 지식을 다른 에이전트에 전이하여 전체 에이전트 그룹의 지능을 향상시키는 연구이다. 멀티에이전트의 전이학습의 경우는 전이학습을 할 에이전트를 찾아 에이전트 간의 통신 연결을 만든 이후에 기존의 전이학습 방법을 활용한다. 강화학습을 통하여 개별 에이전트를 학습하고 이를 다른 에이전트에 전이학습하는 방식으로, 전이학습의 teacher와 student를 연결하는 최적 통신 구조와 최적 정책을 제공하는 방법이 제안되어 분산 태스크 할당 문제에 적용한 연구가 있다[28].
구글 등에서 2017년에 제안된 연합학습은 복수 단말의 분산된 데이터를 직접 학습에 활용하지 않고 모델 계수들을 공유하는 방식으로 보안과 통신 효율성을 증대시킨 학습 방법으로 FedAvg, FedSGD 등의 방법론이 있다[29]. 하지만 중앙의 서버에 모델을 저장하므로 협업 인공지능에 바로 적용하기 어려운데, 최근에는 중앙 서버를 사용하지 않는 탈중앙화 연합학습이 연구되고 있다[30,31]. 이것은 모델 계수의 통합에 P2P 통신을 통하여 서버를 거치지 않고 해당 에이전트들만 참여하므로 전이학습과 달리 양방향의 학습이 가능하고 협업 인공지능의 멀티에이전트에 적용하기 상대적으로 적합하다.
Ⅲ. 협업 인공지능 응용
이 장에서는 협업 인공지능 기술의 응용 분야에 대해서 살펴보기 위해 먼저 에이전트 간 협업 기술의 유망한 핵심 서비스 적용 분야를 조사하고 이에 대한 기존의 대표적 응용 사례를 다룬다.
2020년 정보통신기획평가원에서 발간한 인공지능 청사진 2030은 에이전트 간 협업 기술의 핵심 서비스 분야를 게임, 교육 등 15개 분야로 나누어 구현 시 필요한 기술과 핵심/필수 기술을 조사하였으며, 그 기술의 개수를 정리한 것이 표 5와 같다[7]. 여기서, 관련 기술의 수가 10 이상인 유망 응용 분야인 농업, 드론/항공, 로봇, 스마트홈/가전 분야의 핵심/필수 기술을 살펴보면 표 6과 같다.
표 5 에이전트 간 협업 기술의 핵심 서비스별 필요 인공지능 요소기술 분석표
| 분야 | 구현 시 필요 기술의 수 | 핵심/필수 기술의 수 |
|---|---|---|
| 게임 | 0 | 1 |
| 교육 | 2 | 3 |
| 국방 | 2 | 3 |
| 금융 | 4 | 3 |
| 농업 | 5 | 8 |
| 드론/항공 | 3 | 8 |
| 로봇 | 6 | 4 |
| 법률 | 0 | 0 |
| 스마트홈/가전 | 12 | 4 |
| 에너지 | 8 | 0 |
| 유통/물류 | 5 | 1 |
| 의료/헬스케어 | 5 | 1 |
| 자동차/교통 | 6 | 0 |
| 제조 | 8 | 2 |
| 지식재산 | 1 | 2 |
표 6 에이전트 간 협업 기술의 핵심 서비스별 필요 인공지능 요소기술 분석을 통한 미래 에이전트 간 협업 서비스
다음으로 상기 유망 응용 분야에서의 현재까지 연구되고 개발된 응용 사례를 살펴본다. 농업분야의 협업 인공지능의 대표적인 응용 사례는 유럽 연합에서 군집 소형 무인 비행체(UAV: Unmanned Aerial Vehicle)들을 협업을 통하여 대규모 모니터링 및 방제, 농약 살포 등의 대규모 정밀 농업에 활용한 SAGA(Swarm robotics for AGricultural Applications) 연구가 있다[32].
드론/항공 분야의 응용 사례로는 드론 배송 서비스와 드론 택시 서비스가 있다. 미국에서는 아마존, UPS, 구글을 중심으로 드론 우편물 및 택배 배송 서비스를 사업화하여 테스트 중이며, 중국에서는 알리바바에서 음식 배달 서비스를 시험 운행하였다[33]. 또한, 드론 택시와 관련하여 우버는 드론 택시 승객에 대한 door-to-door 서비스를 수행하는 버티스톱(Vertistop) 인프라를 제시하였으며, GM, 현대자동차를 중심으로 도심 항공 교통(UAM: Urban Air Mobility)의 플랫폼에 대한 연구가 진행되고 있다[34].
로봇 분야 협업 인공지능의 대표적 성공 응용 사례로는 물류 및 생산 자동화에 적용된 AGV(Automated Guided Vehicle) 등의 연구로서 아마존이 물류 창고에 KIVA 시스템을 도입하여 생산성을 향상시킨 사례가 있다. 아마존은 최근에 창고 내 정해진 영역에서만 작업을 처리하는 기존의 방식이 아니라 스스로 판단하여 주행하고 작업을 처리하여 공장 전체에서 작업할 수 있는 완전 자율주행 창고 로봇 Proteus를 발표하였다[35].
스마트홈 가전 분야에서는 이미 아마존의 AI 스피커인 Alexa를 필두로 국내에서도 삼성전자, 카카오, 네이버 등의 AI 스피커 제품군을 통해 chatbot 및 가전제품 제어가 가능한 스마트홈 서비스가 실현되어 제공되고 있다[36]. 이 밖에도 네이버가 세계 최초 로봇 친화형 건물인 신사옥 ‘1784’를 건축하고 이를 테스트베드로 사용하여 실내 건물에서 이동로봇 등의 로봇과 인간이 공존할 때 필요한 데이터를 축적 중에 있다. 이러한 인간과 로봇이 공존하는 스마트홈 및 빌딩 응용 분야는 협업 로봇 분야의 유망한 킬러 응용이 될 가능성이 있다.
제조 분야에서는 공장 환경에 사용되는 인간과 협업이 가능한 다양한 형태의 협업 로봇 연구가 활발하다. 아마존은 아마존 시설 내에서 인간 및 무인 이동체와 소통하고 협업할 수 있는 Robin 로봇 팔을 개발하였으며[37], 테슬라는 최근에 테슬라 차량과 같은 오토파일럿(자율주행 시스템)이 적용된 인간형 로봇 옵티머스를 개발하여 제조 현장에 적용하고자 하고 있다.
Ⅳ. 결론
제한된 자원을 가지는 복수의 에이전트가 인공지능 기능을 협업을 통하여 제공하고, 그 지능을 향상시키는 기술은 인공지능 연구의 궁극적인 목표라고 할 수 있다. 본고에서는 단순하게 chatbot 수준에 머물러 있던 AI Bot의 개념을 확장하여 전체 인공지능 기능을 제공하는 개념으로 정의하였다. 이러한 AI Bot들이 협업 인공지능을 제공하기 위하여 멀티에이전트 협업에 필요한 요구 기술들을 정리하였으며, 각각 인지/공간지능, 행동지능, 인간-기계 소통 기술, 협업학습 기술로 나누어 현재의 기술 현황을 살펴보고, 적용 가능한 응용 사례를 조사하였다. 현재 협업 인공지능 기술에 적용 가능한 기존 연구가 많이 진행되고 있지만, 아직 멀티에이전트 분야로의 적용이 부족한 분야가 많아 추가 연구가 더 필요하다.
이러한 협업 인공지능의 연구는 단기적으로 로봇 분야와 같은 실제 환경에서 개발하는 연구보다는 체화된 인공지능과 같이 시뮬레이션 환경을 거쳐 실제 세계에 적용하는 방향으로 연구가 진행될 것으로 전망된다. 근래 메타버스 기술의 발달로 현실세계와 가상 세계의 격차가 줄어들고 있는 기술 추세를 대입하면 이러한 연구가 실제 현장에 곧 구현될 것으로 생각된다. 따라서, 머지않아 완전한 자율성을 가지고 인간과 상호작용하며 인공지능 개체들 간의 협업을 통하여 인간이 원하는 인공지능 기능을 제공하고 해당 협업 인공지능을 향상시키고 성장할 수 있는 기술이 가능할 것으로 기대한다.
용어해설
최선해(Best Satisfactory Solution) 동적인 환경에서 의사결정과 같은 문제의 해결 방법으로서 가용한 시간, 컴퓨팅 자원 등의 제약을 만족하면서 얻을 수 있는 현실적인 만족해(Satisfactory Solution) 중 가장 최선인 해법
SLAM(Simultaneous Localization And Mapping) 카메라나 Lidar 등의 센서 정보를 바탕으로 로봇의 상대적 또는 절대적 위치나 자세 등을 추정하는 로보틱스 연구의 한 분야. 2차원 및 3차원 SLAM 연구가 있음
체화된 인공지능(Embodied AI) 제한된 몸체(Body) 내에 존재하는 1인칭의 데이터와 알고리즘을 시뮬레이션 환경에서 개발하고, 이를 실제 환경에 적용하는 인공지능 연구
연합학습(Federated Learning) 복수의 에이전트가 학습 데이터가 아닌 인공지능 추론 모델을 공유하여 학습을 진행하는 인공지능 연구
약어 정리
AGV
Automated Guided Vehicle
AI
Artificial Intelligence
BERT
Bidirectional Encoder Representations from Transformers
CLDE
Centralized Learning & Decentralized Execution
CNN
Convolutional Neural Network
IMPALA
IMPortance weighted Actor-Learner Architecture
IoT
Internet of Things
LfD
Learning from Demonstration
LSTM
Long Short-Term Memory
MAS
Multi-Agent System
MRS
Multi-Robot System
NLP
Natural Language Processing
NLU
Natural Language Understanding
P2P
Peer-to-Peer
RL
Reinforcement Learning
SAGA
Swarm robotics for AGricultural Applications
SLAM
Simultaneous Localization And Mapping
PDDL
Planning Domain Definition Language
UAM
Urban Air Mobility
UAV
Unmanned Aerial Vehicle
Google AI Blog, Federated Learning: Collaborative Machine Learning without Centralized Training Data, 2017, https://ai.googleblog.com/2017/04/federated-learning-collaborative.html
L.E. Parker, "Distributed Intelligence: Overview of the field and its application in multi-robot systems," in AAAI Fall Symposium: Regarding the Intelligence in Distributed Intelligent Systems, AAAI Press, Menlo Park, CA, USA, 2007, pp. 1-6.
M. Biswas, Beginning AI Bot Frameworks: Getting Started with Bot Development, Apress Berkeley, CA, USA, 2018.
J. Duan et al., "A survey of embodied AI: From simulators to research tasks," IEEE Trans. Emerg. Top. Comput. Intell., vol. 6, no. 2, 2022.
W. Guo, J. Wang, and S. Wang, "Deep multimodal representation learning: A survey," IEEE Access, vol. 7, 2021, pp. 63373-63394.
T. Cieslewski, S. Choudhary, and D. Scaramuzza, "Data-efficient decentralized visual SLAM," in Proc. IEEE Int. Conf. Robot. Autom., (Brisbane, Australia), May 2018, pp. 2466-2473.
P-Y. Lajoie et al., "DOOR-SLAM: Distributed, online, and outlier resilient SLAM for robotic teams," IEEE Robot. Autom. Lett., vol. 5, no. 2, 2020.
M. Kegeleirs, G. Giorgio, and M. Birattari, "Swarm SLAM: Challenges and perspectives," Front. Robot. AI, vol. 8, 2021.
Y. Chang et al., "Kimera-multi: A system for distributed multi-robot metric-semantic simultaneous localization and mapping," in Proc. IEEE Int. Conf. Robot. Autom., (Xi'an, China), May 2021, pp. 11210-11218.
U. Jain et al., "Two body problem: Collaborative visual task completion," in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., (Long Beach, CA, USA), June 2019, pp. 6689-6699.
X. Liu et al., "Multi-agent embodied visual semantic navigation with scene prior knowledge," arXiv preprint, CoRR, 2021, aXiv: 2109.09531.
Y. Rizk et al., "Cooperative heterogeneous multi-robot systems: A survey," ACM Comput. Surv., vol. 52, no. 2, 2019.
U. Unnat et al., "A cordial sync: Going beyond marginal policies for multi-agent embodied tasks," in European Conference on Computer Vision, Springer, Cham, Switzerland, 2020, pp. 471-490.
G.T. Papadopoulos e t al., "Towards open and expandable cognitive AI architectures for large-scale multi-agent human-robot collaborative learning," IEEE Access, vol. 9, 2021.
R. Bernardo et al., "Planning robotic agent actions using semantic knowledge for a home environment," Intell. Robot., vol. 1, no. 2, 2021.
K. Wang et al., "Visual semantic planning for service robot via natural language instructions," in Proc. IEEE China Autom. Congr. (CAC), (Beijing, China), Oct. 2021, pp. 793-798.
J. Moon, "Plugin framework-based neuro-symbolic grounded task planning for multi-agent system," Sensors, vol. 21, no. 23, 2021.
J. Francis et al., "Core challenges in embodied vision-language planning," J. Artif. Intell. Res., 2022.
S. Tan et al., "Multi-agent embodied question answering in interactive environments," in European Conference on Computer Vision, Springer, Cham, Switzerland, 2020, pp. 663-678.
T.T. Nguyen et al., "Deep reinforcement learning for multiagent systems: A review of challenges, solutions, and applications," IEEE Trans. Cybern., vol. 50, no. 9, 2020.
L. Espeholt et al., "Impala: Scalable distributed deep-rl with importance weighted actor-learner architectures," in Proc. Int. Conf. Mach. Learn., (Stockholm, Sweden), Jul. 2018, pp. 1407-1416.
H. Mao et al., "Learning agent communication under limited bandwidth by message pruning," in Proc. AAAI Conf. Artif. Intell., (New York, NY, USA), Feb. 2020, pp. 5142-5149.
E. Hejazi, "Multi-agent machine learning in self-organizing systems," Inf. Sci., vol. 581, 2021.
S. Reddi et al., "Adaptive federated optimization," Int. Conf. Learn. Repersentation (ICLR), (Virtual Only), May 2021.
A.G. Roy e t al., "Braintorrent: A peer-to-peer environment for decentralized federated learning," arXiv preprint, CoRR, 2019, arXiv: 1905.06731.
T. Winak and Z. Nochta, "An approach for peer-to-peer federated learning," in Proc. Ann. IEEE/IFIP Inter. Conf. Dependable Syst. Netw. Workshops (DSN-W), (Taipei, Taiwan), June 2021, pp. 150-157.
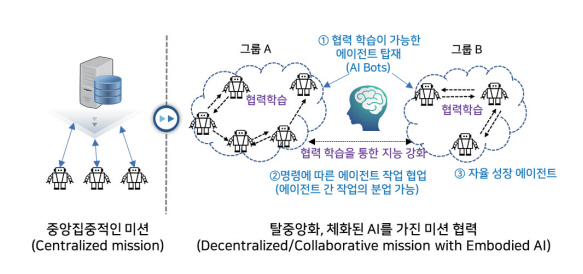
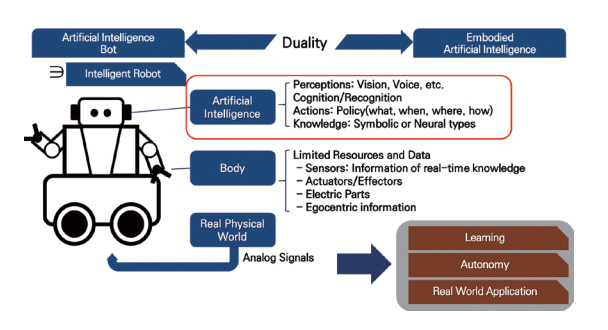
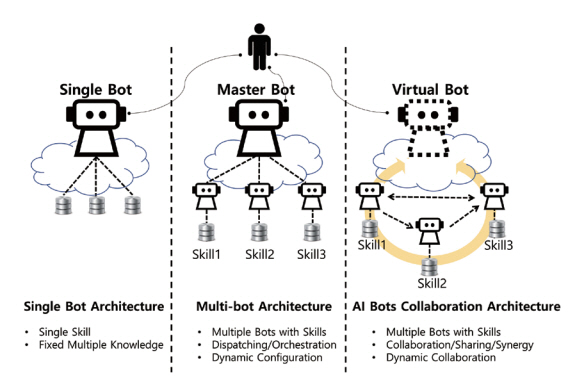
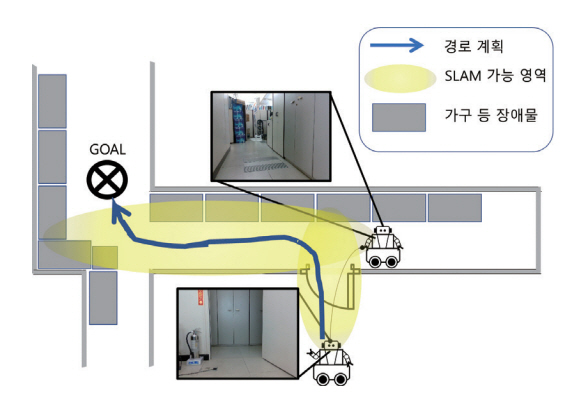
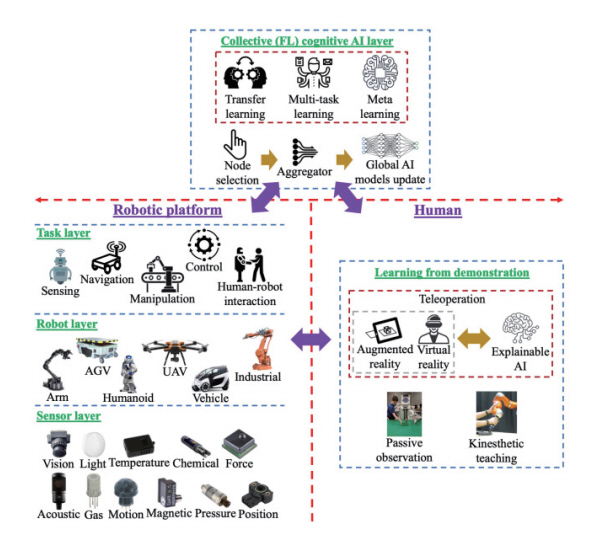
표 1 중앙집중식 및 분산방식 인공지능 비교
| 특징 | 중앙집중식 AI | 분산방식 AI |
|---|---|---|
| 처리 정보 | 전역 대용량 정적 정보 | 국지적 소규모 동적 정보 |
| Client 규모 | 1~1,000 | 10,000 이상 |
| 장점 | 정적 환경 최적해 제공 | 동적 환경 적응 최선해 제공 |
| 단점 | 고비용 및 시간 소모 | 제한된 정보 및 컴퓨팅 자원 |
표 2 협업 인공지능 기술과 기타 탈중앙화 인공지능 기술 비교
| 특징 | 유사점 | 차이점 |
|---|---|---|
| On-device AI | 단말 기반 | 협업 고려 부족 |
| Embodied AI | 제한된 1인칭 정보 | 시뮬레이션 기반 |
| Edge computing | 분산 자원 활용 | 자원 활용에 초점 |
| Federated Learning | 분산된 데이터 활용 | 동일한 모델에만 적용 |
| Multi-agent RL | 분산된 경험 활용 | 고정된 학습 구조 |
표 3 분산 SLAM 기술 비교
| 기술 | 특징 |
|---|---|
| Efficient Decentralized SLAM [10] | 전체가 전역 맵을 공유하지 않고 필요한 로봇에만 정보 교환 |
| DOOR-SLAM [11] | P2P 방식 정보 교환과 인식 예외(Outlier)에 강인한 알고리즘 |
| Swam-SLAM [12] | 다중 로봇 탐사(Exploration) 고려 |
| Kimera-multi [13] | 의사결정 및 공간 인공지능을 가능하게 하는 의미 정보 캡처 |
표 4 조직을 구성하여 작업을 할당하는 방법론
표 5 에이전트 간 협업 기술의 핵심 서비스별 필요 인공지능 요소기술 분석표
| 분야 | 구현 시 필요 기술의 수 | 핵심/필수 기술의 수 |
|---|---|---|
| 게임 | 0 | 1 |
| 교육 | 2 | 3 |
| 국방 | 2 | 3 |
| 금융 | 4 | 3 |
| 농업 | 5 | 8 |
| 드론/항공 | 3 | 8 |
| 로봇 | 6 | 4 |
| 법률 | 0 | 0 |
| 스마트홈/가전 | 12 | 4 |
| 에너지 | 8 | 0 |
| 유통/물류 | 5 | 1 |
| 의료/헬스케어 | 5 | 1 |
| 자동차/교통 | 6 | 0 |
| 제조 | 8 | 2 |
| 지식재산 | 1 | 2 |
출처 Reproduced from [7].
표 6 에이전트 간 협업 기술의 핵심 서비스별 필요 인공지능 요소기술 분석을 통한 미래 에이전트 간 협업 서비스
출처 Reproduced from [7].
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.