Advanced Air Mobility ICT 기술 현황 및 발전 방향
Current Status and Development Direction of Advanced Air Mobility ICTs
- 저자
-
오봉진DNA+드론플랫폼연구센터 bjoh@etri.re.kr 이문수DNA+드론플랫폼연구센터 mslee@etri.re.kr 김법균DNA+드론플랫폼연구센터 kyun@etri.re.kr 정양재DNA+드론플랫폼연구센터 cornor@etri.re.kr 임유진DNA+드론플랫폼연구센터 yoojin.lim@etri.re.kr 임채덕에어모빌리티연구본부 cdlim@etri.re.kr
- 권호
- 38권 3호 (통권 202)
- 논문구분
- 지능형 미래사회 구현을 위한 디지털 융합 기술
- 페이지
- 1-10
- 발행일자
- 2023.06.01
- DOI
- 10.22648/ETRI.2023.J.380301
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- In this study, the status of global advanced air mobility (AAM) was investigated to derive information and communications technologies (ICTs) that should be prepared according to directions of domestic AAM development. AAM is an urban air traffic system for moving from city to city by electric vertical take-off and landing or personal aircraft. It is expected to establish a three-dimensional air traffic system that can solve ground traffic congestion caused by the rapid global urbanization. With the full-scale commercialization of AAM solutions, high-density air traffic is expected, and with the advent of the personal air vehicle (PAV), the flight space usage is expected to expand. Therefore, it is necessary to develop a safe AAM service through early research on core ICTs for autonomous flight.
Share
Ⅰ. 서론
AAM(Advanced Air Mobility)은 도심 상공에서 여객이나 화물을 운송할 수 있는 비행 이동 수단을 통칭하는 UAM(Urban Air Mobility)을 도시 간으로 확장한 개념으로, 기체 측면에선 기존 항공기나 소형드론을 배제한 도심 특화형 eVTOL(Electric Vertical Take-Off and Landing) 형태가 중심이 될 것으로 예상된다.
미국과 유럽이 AAM 기술을 주도하고 있는 상황에서 기체, 부품 및 관제 등 전통적인 항공분야 기술력은 국내 경쟁력이 뒤지고 있으나, 아직 AAM 산업 형성 초기 단계로 국내 업체가 배터리나 ICT 기술에 대한 경쟁력은 충분하여, 다른 산업과 달리 산업 성장기 즈음의 주도권 전쟁에서 국내 업체들이 앞설 기회가 있다[1].
특히, AAM 초기 단계에서는 D.N.A 활용사례가 적으나, AAM 성장기에 접어드는 2025년부터 D.N.A 기반 ICT 기술의 중요성이 급격히 증가할 것으로 전망된다. 따라서, 상대적으로 경쟁력이 뒤지는 기체, 부품 등의 분야에 지원하여 경쟁력을 보완함과 동시에, 강점을 보이는 ICT 분야에 지속적인 범정부적 지원을 통해 국내기업의 글로벌 AAM 기술 주도권 확보를 직간접적으로 지원해야 할 것이다[2].
본고에서는 국내외 AAM 추진 현황을 조사하고, AAM ICT 기술의 발전 방향에 대해 알아본다. Ⅱ장에서는 AAM 글로벌 정책 동향을 살펴보고, Ⅲ장에서 AAM ICT 기술 현황 및 향후 확보해야 할 중점기술에 대해 알아본다. 그리고, Ⅳ장에서는 마지막으로 본고의 결론과 시사점을 제시한다.
Ⅱ. AAM 정책 동향
1. 국외 정책 동향
미국은 2003년 NASA 중심으로 일반인이 운전면허로 운전할 수 있는 PAV(Personal Aerial Vehicle) 개발 프로젝트를 추진했고, 소형드론 시장을 장악한 중국에 대응을 위해 군수용 항공 기술을 바탕으로 민간 업체 중심의 AAM 연구·개발로 정책 방향을 전환하였다[3].
유럽은 2016년부터 드론, 개인 비행체 등 소형 비행체를 포함한 공역관리 시스템 개발사업을 진행하고 있으며, 유럽 항공안전청은 2019년부터 eVTOL 인증기준 개발을 진행 중이다. 또한, 2021년 유럽 6개 도시 3,900여 명을 대상으로 UAM 인식에 대한 온라인 설문 조사로 83%의 긍정적 결과를 얻어냈다[3,4].
일본은 2018년 발족한 항공모빌리티 혁명을 위한 민간협의회에서 eVTOL 개발 및 UAM 추진 등에 적극적으로 협력, 2019년 시험 비행 및 실증 착수하고, 2030년대에 완전 실용화를 목표로 진행 중이다[3].
중국은 2020년 11월에 eVTOL과 UAM 관련 국가 전략 부재를 지적하고, 드론택시 상용화 기반 마련과 더불어 베이징시 옌칭구 등 13개 도시를 실험구로 지정, 무인 비행 서비스 시험 운영을 허용했다[3].
지금까지 각국은 주로 기체 개발에 집중하고 있고, 운송 〮 운용 및 공역 설계ㆍ통제 등 부문은 중장기 관점에서 기술 개발이 집중되고 있다(표 1). UAM 시장 선점을 위해 eVTOL 개발에 다수 국가 및 기업들이 진출하고 있으며, 2021년 현재 400여 개 모델이 개발 중 또는 계획에 있고, 2025년 전후로 상용화가 예상된다[5].
표 1 국제 AAM 추진 현황
2. 국내 정책 동향
국내는 국토교통부가 2020년 5월 발표한 K-UAM 로드맵과 2021년 6월 발표한 기술로드맵(그림 1)을 통해 UAM 관련 국가전략을 수립하였다. 더불어, UTK(UAM Team Korea)를 발족하여 민관협력을 통한 기체 개발 및 인프라 구축을 적극적으로 추진 중이다.
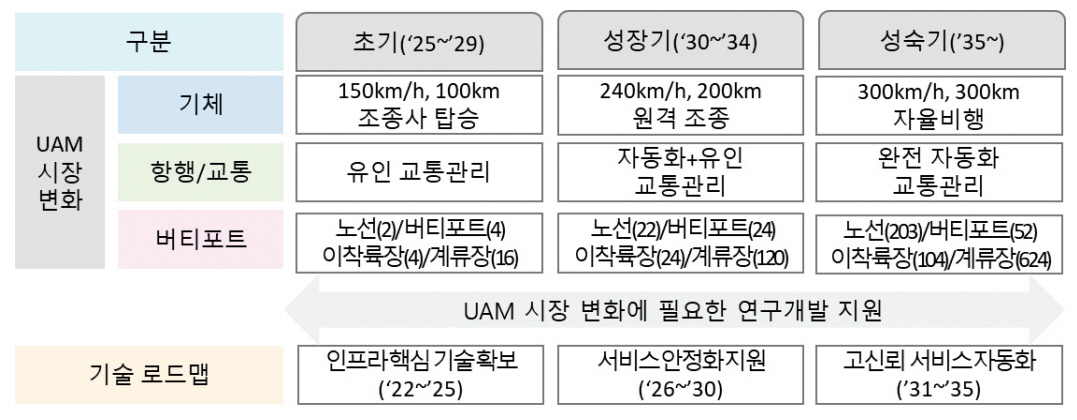
K-UAM 로드맵에 따르면, UAM을 대중이 이용할 수 있는 교통수단으로 현실화하고, 기술 확보와 산업 생태계 형성을 위해 기반 마련, 상용화, 대중화 순서로 추진 계획이다. 이를 위해 K-UAM 기술 로드맵에서 UAM 정책 수행을 위한 기술 지원을 단계적으로 추진하기 위해 5개 핵심부문, 38개 중점기술, 총 118개 세부기술을 도출하고, 선도적 기술 확보를 위한 R&D 지원을 계획하고 있다[6]. 또한, 국토교통부는 국내 UAM 상용화 서비스 운영전략과 시나리오를 담은 K-UAM 운용개념서 1.0을 민관협의체 심의ㆍ확정하여 2021년 9월 공식 발표하였다.
정부의 정책에 힘입어 서울, 인천 등 지자체가 UAM을 미래의 중요 교통수단으로 인식하고 기체 개발 및 인프라 조성에 적극적 투자 의지를 보여주고 있다. 특히, 인천광역시는 기체 개발사업을 직접 수행 중이며, 시험시설 설치 등 UAM 사업 개발에 적극적이다.
K-UAM 실증을 위해 K-UAM 그랜드챌린지가 1단계 개활지(전남 고흥), 2단계 도심(수도권) 등 총 2단계에 걸쳐 2023년 8월부터 진행된다. 국내외 항공, 통신 및 기체 제작업체로 구성된 7개의 컨소시엄 주도로 기체ㆍ운항, 교통관리, 버티포트 등의 통합운영 타당성 검토를 목표로 진행될 예정이다.
Ⅲ. AAM ICT 기술 동향
1. K-UAM 중점기술 분류
국토교통부는 UTK를 통해 K-UAM 로드맵의 단계별 목표 달성을 위해 중점 추진 기술을 발굴하여 지원하고 있다. 중점 추진 기술은 미래 K-UAM 운용시나리오에 정의된 기체 〮 부품, 인프라, 핵심, 서비스 및 항행ㆍ교통관리 기술 등 5가지로 분류되고 있다(표 2 참고).
표 2 K-UAM 중점 기술 분류
K-UAM 기술로드맵에 따르면, 2025년까지는 K-UAM 그랜드챌린지를 통한 서비스 타당성 검토 이후, 본격적인 상용화 준비를 위한 기체 제조ㆍ인증, 버티포트 구축 및 UAM 항법ㆍ관제 인프라 등 기반 환경 조성에 투자가 집중되었다. 이와 관련하여 AAM ICT 기술도 기체 인증 및 시험평가, 조성된 인프라 시설의 운영, 기본적인 교통관제나 운항 서비스 추진을 위한 것들이 진행되고 있다[6].
2026년 이후 AAM의 성숙기에 접어드는 2035년까지는 도시 간 이동범위 확대와 플랫폼 연계 등 서비스 영역의 확대 실현을 위한 ICT 기술 투자가 필요한 시기이다. 특히 AAM 이용 보편화 및 PAV 등의 등장으로 도심 항공교통 혼잡도가 증가하고, 다양한 도심 공간에서 서비스가 제공되어야 한다. 이러한 AAM 서비스 영역 확대 실현을 위하여 지능형 관제와 더불어 완전 자율 비행 기술은 앞으로 확보해야 할 필수 ICT 기술로 알려져 있다.
다양한 도심 공간에서의 자율비행 기능이 제공되기 위해서는 공중 충돌회피, 자율 항법, 항공 통신, 그리고 고신뢰 센서 융합 등의 핵심기술이 중요하며, 이러한 기술들의 현황에 대해 자세히 살펴볼 필요가 있다.
2. Mid-Air Collision Avoidance
가. ACAS X
ACAS X(Airborne Collision Avoidance System X)는 국제민간항공기구(ICAO)에서 항공기 간 충돌 방지를 위해 그동안 사용해온 ACAS Ⅱ/TCAS Ⅱ를 대체하기 위해 개발 중인 규격이다.
표 3과 같이 ACAP X는 기존 항공기를 위한 ACAS/TCAS, ADS-B 프로토콜과 함께 민간에서 운영하는 원격조종항공기(RPAS: Remote Piloted Aerial System)의 증가를 대비한 대응 규격을 포함한다.
표 3 국제 공중 충돌회피 장치 규격
그림 2와 같이 송수신 주파수는 기존 항공 충돌 방지 규격(1,090/1,030MHz)을 따르고, 정보 송출 기능이 없는 소형 항공기를 감시하기 위한 온보드 센서(레이더, 전기/광학, 적외선 등)를 활용한 충돌 방지 기능을 정의하고 있다. 따라서 AAM 서비스 보편화 시점에 동적 장애물에 대한 회피 기동도 가능할 것으로 보인다.

나. DAA 기술
감지 및 회피(DAA) 규격은 기존 항공 충돌 방지 규격(TCAS, ADS-B 등)을 따르는 협조적 항공기 외에, 비협조적인 무인 항공기의 등장에 따라 새롭게 사용되고 있는 포괄적인 공중 충돌회피 기술 용어이다. 특히, 저고도에서 특정 임무 수행을 위해 원격 조종되는 소형 항공기가 늘어나고, 비행 관련 정보를 송출하지 않는 경우가 많다.
DAA는 무인 항공기가 비행 중에 마주할 수 있는 다양한 정적, 동적 장애물을 온보드 센서를 통해 발견하고 피할 수 있는 기술을 추가하는 것으로써, 국제적으로 무인 항공기를 제도권으로 포함하기 위해 ACAS Xu를 정의하고 있다.
ACAS Xu의 DAA는 UTM이나 주변 항공기로부터 실시간 운항 정보를 받으면서 회피하는 것뿐만 아니라 탑재한 센서를 통해 주변의 장애물을 파악하는 것으로 TCAS에서 사용하던 방식과는 차이가 있다.
기존 TCAS에서는 결정론적인 알고리즘으로 예측하고 회피 조언을 제공했다면, DAA에서는 확률론적 방법으로 예측과 회피를 조언한다.
TCAS는 자기 주변 항공기의 운항 정보를 1초 단위로 수집하여, 두 항공기의 움직임으로 두 직선을 도출하여 충돌 가능 지점(CPA: Collision Predicted Area)을 예측하거나, 타 항공기의 움직이는 지점을 중심으로 원을 구하고, 충돌 근접 지역(MAC: Maid-Air Collision)을 RA 영역(반경 500피트)으로 정하여 진입하지 않도록 조종사에게 안내한다[7].
ACAS Xu의 DAA에서는 2가지 확률적 기술을 제공하고 있는데, 룩업 테이블 기반의 오프라인 방식과 신경망 기반의 온라인 방식이 있다.
각각 다음의 입력 파라미터에 대해 SL(Strong Left), WL(Weak Left), COC(Clear Of Conflict), WR(Weak Right), SR(Strong Right) 등 5개 액션에 대한 출력을 확률적으로 추천되도록 학습한다.
● ρ(feet): 본 기체와 타 기체와의 거리
● θ(rad): 본 기체 진행에 상대적인 타 기체의 위치
● ψ(rad): 본 기체와 타 기체의 상대적인 진행각도
● vown(ft/s): 본 기체의 속도
● vint(ft/s): 타 기체의 속도
● τ(s): 수직 분리 가능 시간
● aprev(도/s): 직전 지시
오프라인 방식은 마르코프 결정 프로세스(MDP)와 동적 프로그래밍(DP) 기반으로 각 입력에 대한 5개의 확률이 계산된 테이블을 구성하게 된다. [입력(7)*1억2천만 포인트(격자)*출력(5)]으로 구성된 상태 모델에 대해 총 6억 개 실수를 저장할 공간이 필요하다. 약 4.8GB의 용량이 필요하지만, 현재 인지된 센서 값을 가지고 실시간 처리가 가능하다는 장점이 있다[8].
신경망 기반 온라인 방식은 입력 인자를 50개 노드를 갖는 6개 은닉층로 구성된 심층 신경망에 입력하고, 학습하여 온보드상에서 실시간 추론이 가능한 모델을 활용한다.
참고문헌 [8]에 따르면, 오프라인 방식에 비해 1/1,000 정도(약 5MB) 크기로 동작할 수 있다. 다만, 상태를 직전 액션(5개)과 충돌 시간(9개)으로 구분하고, 총 45개의 네트워크 모델을 학습하여 사용하므로 최종적으로 22배의 효율을 갖는다.
3. Autonomous Flight Planning
가. 자율 항법
자율 항법(Autonomous Navigation) 기술은 항로 설정, 항로 유도 및 항행으로 이루어진다. AAM 비행은 미리 정해진 공역을 3D 지도로 구현하여 제공하고, UATM과 교류를 통해 승인받은 항로로 운항한다.
자율 항법을 위해 현재 위치를 알아내는 것이 중요하며, 국내 AAM은 ’23년 말부터 운용될 한국형 위성항법보강시스템(KASS)을 이용할 예정이다(그림 3). AAM 비행 고도인 300미터 이상에서는 전파 방해가 거의 없으므로, GNNS 신호를 SBAS 등으로 보정하여 1~1.6미터 내 오차로 위치를 파악할 수 있다[9].

다만, 착륙이나 경유를 위해 도심을 비행하는 경우는 빌딩이나 새와 같은 장애물과 충돌할 가능성이 크다. 이를 위해 ’28년부터 운용 예정인 한국형 위성항법시스템(KPS)을 이용하여 더 정밀한(cm) 단위의 위치 정보를 제공할 수 있다. 그런데도 잡음이나 음영지역이 발생할 수 있으므로 이런 문제를 해결하기 위해 옥상이나 가로등 등의 시설물에 보정 신호 송출을 위한 시스템을 설치하여 연계하는 연구도 진행 중이다[10].
마지막으로 온보드된 시각센서로 위치 인식과 항로 유지를 통해 목적지를 찾아가거나 이착륙하는 기술이 적용될 수 있다. 비주얼 서보잉, 비주얼 오도 메트리, 영상 기반 SLAM 기술 등을 통한 속도 및 방향 계산, 위치 및 자세 결정을 통한 궤적 추적, 영상 특징 기반 맵을 구성하여 DAA 기술과 함께 자율 항법에 활용할 수 있다. 오차 누적이나 악기상에 대응하기 위해 가속 센서, 라이다, 레이더 등의 센서를 융합하여 실시간 상황에 최적화된 시각적 인식 성능을 높이는 연구도 진행 중이다. 최근에, 이스라엘 업체인 Daedalean은 시각센서를 이용한 위치 추정 및 이착륙 유도에 관한 기술을 드론에 적용하여 제품화에 성공하였다[11].
국내 AAM의 성장기(’30년 이후)에는 고밀도 AAM 교통량이 예상되고, PAV 등의 개인용 기체도 도심 깊숙이 운항할 것으로 예측되어, 온보드 시각센서 위주의 자율 비행이 꼭 필요할 것으로 판단된다.
나. 비상 계획
비정상적(Off-nominal) 상황은 사전 계획된 비행 계획에서 벗어나는 모든 우발적인 상황(Contingency)과 비상 상황(Emergency)을 포함하며, AAM에는 비정상 상황에서도 비행체를 정상 상태로 되돌릴 수 있거나 비상 착륙과 같은 적극적인 비상 대응 및 관리 기능이 필수적으로 탑재되어야 한다. 그리고 미국립과학공학의학원 항공우주공학위원회가 해당 기능을 제안했듯이 UAM 내 파일럿 부재를 고려하여 자율적 동작 특성을 가지도록 설계 구현되어야 한다[12].
● 작업 수가 많고 파일럿 교육 과정이 감소하고 있어서 자율적 비상 관리가 필요함
● 파일럿 없이도 적시에 안전한 비행 운영 상태 복원을 위해 자율 시스템 권한 필요
● 자율적 비상 관리는 비행체 통제력 상실, 타 물체/지형과의 충돌, 항공교통관리 서비스에 대한 불필요한 방해 없이 비상 완화 조치를 정확하게 선택 실행해야 함
여러 기관에서 발표한 UAM 운용개념서들은 비상 관리 개념 또는 시나리오를 설명한다. 대표적인 비상 상황은 C2(Command and Control) 링크 손실, DAA 손실, GPS 손실, 추진 시스템 관련 고장, 에너지 저장 시스템 장애, 기내 의료 응급을 포함한다. 기본적으로 온보드 파일럿 없는 비행체 및 비상 관리를 위한 상당한 자동화를 가정하기 때문에 비상 관리 절차의 시작은 주로 온보드-자동화에 할당되고 지상 운영 센터의 비행체 관리자로부터 통지 및 감독이 이뤄진다. C2 데이터 링크가 없는 경우에도 안전하게 비행 완료할 수 있는 온보드 자동화이며, 항전 장비는 자동으로 사전 프로그래밍된 비상 절차를 실행한다. C2 데이터 링크가 있는 경우, 비행체 관리자가 해당 비상 절차를 무시할 수 있다[13]. 또한 비상관리를 위해서는 버티포트의 비상 착륙지나 2차 착륙지에 대한 정보를 버티포트 간 또는 인근 항공 트래픽 제어 기관과의 공유가 필요하다[14].
NASA 연구진은 UAM을 위한 “우발적 상황의 지능적 관리”를 위해 임무 관리 수준에서 의사 결정을 내릴 수 있는 계층적인 소프트웨어 구조를 제안한 바 있다[15]. 이 구조는 고도로 규정된 규칙 기반 방식이 아니라 안전-필수 시스템 및 안전 보장 수준으로 머신러닝 기술의 통합을 고려한다. 또한, 각 구성 요소는 실시간 데이터를 사용하여 실제 상황과 일치시키는 방식으로 비행체 기능을 향상시켜서 동적 데이터 기반 응용 시스템 패러다임을 반영한다.
AAM의 비상 관리 운영 시스템을 구체적으로 설명하는 구조화된 방식은 현재 공개된 것이 없는데, 이는 대다수의 UAM 시스템이 자체 솔루션 형태로 개발 중이고, UAM 관련 인증이 체계화 과정 중이기 때문으로 판단된다.
4. AAM 항공 통신망 기술
AAM 통신을 위한 주파수는 이동통신에 사용하고 있는 Sub-6 주파수(3.5GHz), 5G NR 밀리미터 대역(24~86GHz), LEO 위성통신 주파수(28GHz)등이 후보로 거론되고 있다. 또한 최근 미국에서는 AAM 전용 주파수로 5GHz를 사용하기 위한 규칙을 제시했으며, 우리나라는 드론 제어를 위해 넓은 커버리지를 갖는 433MHz 통신 기술을 개발하고 있다.
3GPP R17에서는 새로운 이동통신 단말로 무인비행체를 추가하였으며, 무인비행체를 위한 통신 요구사항에는 UAV 인식, 교통관제를 위한 승인 정보, UAV 간의 제어 및 추적, 사용자 데이터 연결 방법에 대해 LTE, 5G에서 지원하도록 정의하였다[16].
현재 AAM 통신 후보 기술들과 특징은 표 4와 같다. 기존 모바일 서비스와 달리 AAM 통신은 고도 300미터 이상에서 안정적인 통신이 가능해야 하므로, 3차원 커버리지 최적 설계 기술과 네트워크 슬라이스 기술이 적용되어야 한다.
표 4 AAM 항공 통신을 위한 후보 기술
최근, KT는 K-UAM 그랜드 챌린지 1단계 실증을 위해 전남 고흥 항공센터 일대의 회랑과 버티포트에 AAM 전용 5G 항공망을 구축하였다. 3차원 AAM 운항 구간에 빔 패턴을 모델링해 최적화 설계를 진행하여 UAM 운항 고도에서 통신 음영이나 간섭이 발생하지 않도록 하였다. 네트워크 슬라이스 기술은 특수 및 일반 목적의 트래픽을 각각 분리해 통신서비스 품질을 보장하는 것으로, AAM 전용망에서는 네트워크 부하가 심한 상황에서도 주요 트래픽들에 대한 전송 품질을 보장한다[17].
이 외에도 내년부터는 UAM 전용 항공망에 위성통신 및 양자암호통신 기술을 적용해 UAM 운항에 필수적인 통신 보안성과 신뢰성을 크게 높일 계획이다[17].
위성통신과 5G를 결합한 통신서비스를 제공함으로써 지상 기지국만 의존하는 경우에 발생할 수 있는 통신 두절을 예방할 수 있다. 또한 외부의 해킹, 재밍 등의 공격으로부터 무인화된 AAM 기체를 보호하기 위하여, 양자암호 기술과 블록체인을 결합한 사이버보안 기술이 국내 통신 3사 주도로 연구되고 있다.
5. Reliable Sensor Management
가. Fault Tolerant Multi-Sensor Fusion
UAM의 자율항법은 기존의 전통적인 항법 장치의 이중화를 바탕으로 안정성 확보뿐만 아니라 비전 및 센싱 기술의 발전과 함께 멀티센서의 융합을 통해 정확도를 높이는 방향으로 진화하고 있다. 이 과정에서 센서의 오류 또는 오동작을 극복하기 위한 다양한 방법이 시도되고 있다.
UAM은 도심 운용으로 인해 충돌위험에 빈번하게 노출되므로 정확한 실시간 위치 측정이 요구된다. 현재 GNSS가 널리 사용되고 있지만 GNSS 신호 차단, 멀티패스 효과, 위성통신 음영지역 등으로 인해 정확도를 보장하지 못한다. 이를 극복하기 위해 다른 센서의 위치 정보를 융합함으로써 정확도를 높이는 방향으로 진화하고 있다.
GNSS가 사용되기 어려운 환경에서는 비전 센서를 활용하여 UAM 기체의 정확한 자세를 보정할 수 있다[18]. IMU 센서까지 융합한 VIO(Visual Inertial Odometry)를 구성하면 조명의 변화, 빠른 움직임, 화각 제약 등에 강인한 성능을 얻을 수 있다.
UAM의 각 센서 레벨에서 발생하는 장애를 극복하기 위한 다양한 시도가 있다. 주로 GPS, 배터리, 가속도계 등의 모니터링에 Bayesian Network를 적용하여 장애상황의 의사결정 또는 QoS 조절에 활용하거나[19] 비행제어컴퓨터(FCC), 모터, IMU 등의 장애로 인한 항법 오류를 극복하기 위해 Markov Chain 모델을 사용하기도 한다[20]. 액추에이터, 가속도계, GPS, IMU 등의 장애를 극복하기 위한 시스템 제어에 Kalman 필터를 사용하기도 한다.
최근에는 FPGA기반 CNN 가속기를 기존 센서(GPS, IMU, FCC 등)와의 융합을 통해 비전기반 객체 탐지 기술을 항법에 적용하는 사례도 늘고 있다[21].
나. Failure Mode & Effect Analysis
다음 분류는 VIO 센서 융합 시스템에서 발생하는 장애 상황이다.
● Visual sensor failure mode
● IMU sensor failure mode
● Integrated VIO system failure mode
VIO의 장애는 조도에서부터 여러 센서의 오류까지 다양한 레벨에서 발생할 수 있으며, 이는 위치 인식 결과에 누적되어 오차를 증가시키므로 멀티센터의 시스템 초기단계에서부터 다양하게 발생할 수 있는 장애에 대해서도 강인한 특성을 가질 수 있도록 설계해야 한다.
하드웨어 신뢰성 관점에서 센서의 장애와 장애로 인한 현상을 분류[22]하면 표 5와 같다.
표 5 UAM의 Failure Mode & Effect
이 외에도 FPGA 기반 CNN 가속기의 오류로 인한 탐지 및 인식 성능에 미치는 영향에 대한 연구도 진행되고 있다.
Ⅳ. 결론
본고에서는 AAM의 개념과 국내외 정책 현황에 대해 살펴보았다. 또한, K-UAM 기술로드맵 1.0의 중점기술 중심으로 기체에 탑재할 ICT 기술의 추진 현황 및 향후 발전 방향에 대해 알아보는 기회를 얻었다. AAM 성숙기에 접어드는 ’30년 원격제어를 거쳐, ’36년 이후에는 완전 자율비행 기술이 최종 목표로 설정되어 있다. 이러한 목표 달성을 위해 온보드 융합 센서 기반 충돌회피, 자율 항법 등 관련 핵심 ICT 기술에 관한 연구개발이 선도적으로 필요한 시점이다.
AAM 산업의 성장기 이후 본격적으로 열리게 될 서비스 시장은 지금까지도 뚜렷한 강자가 보이지 않는 무주공산의 영역이다. 차세대 성장 동력의 하나로 기대되는 AAM 시장에서 국내기업의 기술 경쟁력 확보와 시장 주도가 이루어질 수 있도록 정부의 시의적절한 정책 및 지속적인 연구·개발 투자가 이루어지기를 기대한다.
용어해설
AAM 도심에서 이용할 수 있는 항공 교통 수단인 UAM의 상위 개념으로, 도심을 비롯해 지역 거점 간 이동까지 포함하는 이동 수단
약어 정리
G. Manfredi and Y. Jestin, "An introduction to ACAS Xu and challenges ahead," in Proc. IEEE/AIAA Digit. Avionics Syst. Conf. (DASC), (Sacramento, CA, USA), Sept. 2016.
D. Manzanas Lopez et al., "Evaluation of neural network verification methods for air-to-air collision avoidance," J. Air Transportation, vol. 31, no. 1, 2023.
National Academies of Sciences, Engineering, Medicine, Aeronautics and Space Engineering Board, Advancing Aerial Mobility: A National Blueprint, National Academies Press, Washington D.C., USA, 2020.
UK Air Mobility Consortium, Urban Air Mobility Concept of Operations for the London Environment, 2022. 3.
I.M. Gregory et al., "Intelligent contingency management for urban air mobility," in Proc. Int. Conf. DDDAS, (Boston, MA, USA), Oct. 2020, pp. 22-26.
T. Tabassum et al., "A fault tolerant multi-sensor fusion navigation system for drone in urban environment," in Proc. POSNAV, (Berlin, Germany), Nov. 2022.
S. Zermani et al., "Bayesian network-based framework for the design of reconfigurable health management monitors," in Proc. 2015 NASA/ESA AHS, (Montreal, Canada), June 2015.
Y. Pashchuk et al., "Reliability synthesis for UAV flight control system," in Proc. ICTERI, (Kyiv, Ukraine), May 2017.
D. Guo et al., "A hybrid feature model and deep learning based fault diagnosis for unmanned aerial vehicle sensors," Neurocomputing, vol. 319, 2018.
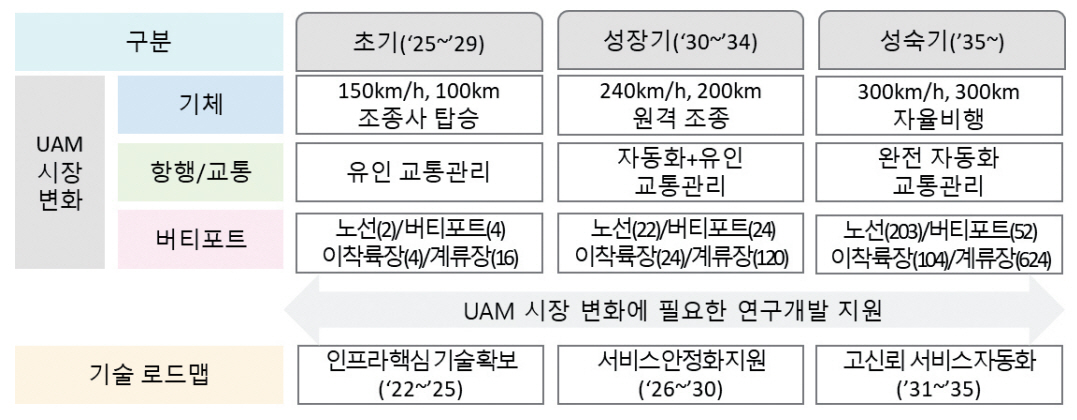


표 1 국제 AAM 추진 현황
표 2 K-UAM 중점 기술 분류
출처 Reproduced with permission from [6], 공공누리 1유형.
표 3 국제 공중 충돌회피 장치 규격
표 4 AAM 항공 통신을 위한 후보 기술
표 5 UAM의 Failure Mode & Effect
출처 Reproduced with permission from [22], CC BY 4.0.
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.