드론 정밀 측위 기술 동향
A Trend Survey on Precision Positioning Technology for Drones
- 저자
-
이정호도시·공간ICT연구실 jh.lee86@etri.re.kr 전주일도시·공간ICT연구실 seventhday07@etri.re.kr 한경수도시·공간ICT연구실 kshan@etri.re.kr 조영수도시·공간ICT연구실 choys@etri.re.kr 임채덕에어모빌리티연구본부 cdlim@etri.re.kr
- 권호
- 38권 3호 (통권 202)
- 논문구분
- 지능형 미래사회 구현을 위한 디지털 융합 기술
- 페이지
- 11-19
- 발행일자
- 2023.06.01
- DOI
- 10.22648/ETRI.2023.J.380302
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- Drones, which were early operated by remote control, have evolved to enable autonomous flight by combining various sensors and software tools. In particular, autonomous flight of drones was possible since the application of GNSS-RTK (global navigation satellite system with real-time kinematic positioning), a precision satellite navigation technology. For instance, unmanned drone delivery based on GNSS-RTK data was demonstrated for pizza delivery in Korea for the first time in 2021. However, the vulnerabilities of GNSS-RTK should be overcome for delivery drones to be commercialized. In particular, jamming in the navigation system and low positioning accuracy in urban areas should be addressed. Solving these two problems can lead to stable flight, takeoff, and landing of drones in urban areas, and the corresponding solutions are expected to establish a hybrid positioning technology. We discuss current trends in hybrid positioning technology that can either replace or complement GNSS-RTK for stable drone autonomous flight.
Share
Ⅰ. 서론
초기 드론은 군의 연습 사격 표적으로 사용할 목적으로 개발되었으나, 2010년 국제전자제품박람회(CES)에서 프랑스 Parrot가 쿼드롭터 기반의 AR 드론을 공개하며 레저 및 상업용으로 주목받기 시작하였다. 특히, 최근 러시아-우크라이나 전쟁에서 알 수 있듯이 드론은 국가안보 차원에서 중요한 전략 기술로 주목받고 있다. 이외에도 wireless coverage, remote sensing, 보안 및 감시, 농업, 택배 등의 상업 분야와 조난자 탐색/구조 등의 안전 분야, 그리고 촬영 등의 레저용으로 그 활용 분야가 다양해지고 있다. 각 분야에서 실외와 실내 환경에서 드론의 활용도를 높이기 위해 원격제어가 아닌 자율주행에 주목하고 있다. 드론의 안정적이고 효율적인 이동 및 이착륙, 그리고 장애물 회피를 위한 자율주행의 핵심기술 중 하나는 정밀 측위 기술이다. 따라서, 본고에서는 현재까지의 실내외 드론 정밀 측위 기술의 연구 동향을 분석하여 향후 드론 자율주행에 활용될 수 있는 정밀 측위 기술의 발전 가능성을 살피고자 한다.
초기 드론의 측위 기술은 위성항법시스템(GNSS: Global Navigation Satellite System)을 활용하였다. GNSS는 위성으로부터 송신된 신호를 사용자 수신기에서 수신하여 거리 측정치를 활용하여 수신기 위치를 산출한다. GNSS는 지구상에서의 절대 위치(위도와 경도) 정보를 제공하기에 통상 드론 측위 기술에 주로 활용되고 있다. 하지만, 거리 측정치는 LOS(Line of Sight)에 영향을 받아 복잡한 도심에서는 측위 성능이 저하되므로, 이를 보완할 수 있는 정밀 측위 기술이 요구된다. 최근 드론 자율주행을 위해 관성 센서, 카메라, 라이다(LiDAR: Light Detection And Ranging), 그리고 다양한 무선통신 기능이 탑재되고 있다. 특히, LTE/5G 등의 고속 이동통신 기술은 자율주행 드론을 활용한 다양한 데이터 통신 서비스의 핵심기술로 활용될 것으로 기대된다.
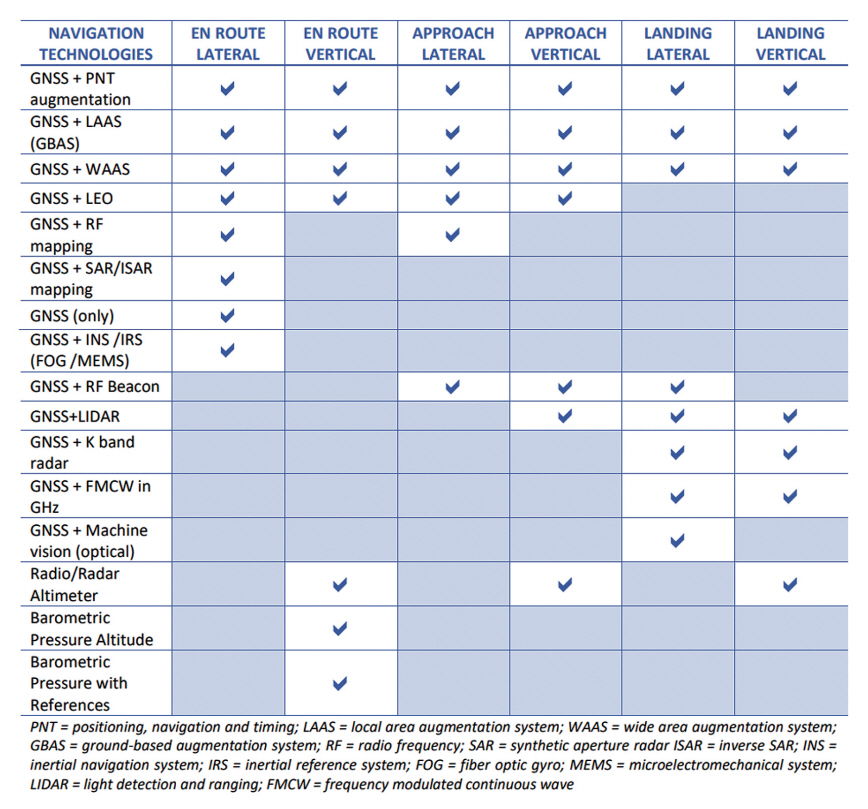
앞서 언급된 다양한 센서와 무선통신 기술은 GNSS와 같이 단독 측위 기술로 활용될 수 있다. 하지만, 드론의 특성상 도심 내 건물보다 낮게 비행하는 경우는 드물 수 있다. 이러한 드론의 활용 특성상 위성과의 LOS가 보장되는 중고도 및 고고도 영역에서는 절대 위치를 제공하는 저가형 GNSS를 활용하는 것이 매우 효과적이다. 특히, RTK(Real Time Kinematic)나 PPP(Precise Point Positioning)와 같은 센티미터 수준의 측위 정확도를 제공하는 고정밀 위성항법 기술의 등장으로 GNSS의 활용도는 더욱 높아지고 있다. 하지만, 드론이 저고도 영역에서 비행하는 이륙 및 착륙 시점에서 RTK나 PPP와 같은 고정밀 위성 항법 기술도 기존의 GNSS와 같이 LOS에 영향을 받는다. 특히, 위성 신호에 대한 Jamming 문제는 국가적으로도 큰 쟁점이 되고 있다. 이에 그림 1과 같이, 최근 드론에 탑재되고 있는 다양한 센서와 통신 기술은 위성 항법 기술의 대체 또는 함께 활용함으로써 저고도 영역에서 드론 자율주행을 위한 정밀 측위 기술로 활용될 수 있을 것으로 기대되고 있다[1].
본고에서는 중고도 및 고고도 영역에서 정밀 측위 수행이 가능한 위성 측위 기술을 소개한다. 이후, 저고도 영역에서 위성 측위 기술을 대체 또는 함께 활용 가능한 영상 및 무선통신 기반 측위 기술을 소개한다. 마지막으로 위성 측위 기술과 영상 및 무선통신 기반 측위 기술을 함께 활용하는 복합 측위 기술을 소개하며 결론으로 마무리한다.
Ⅱ. 연구 동향
1. 위성 측위 기술
위성항법시스템(GNSS)은 지구상에서의 절대 위치정보를 제공하고 있어 드론 측위 기술의 기준이 되고 있다. 특히, RTK와 PPP 기술은 고정밀 위성 측위 기술로 알려져 있다.
RTK 기술은 지상 기준국의 반송파 위상 보정 정보를 이용하여 실시간으로 고정밀 측위 결과를 얻을 수 있다. 반송파 위상 보정 정보는 수신기 간 차분과 위성 간 차분을 연속적으로 수행한 이중 차분(Double Difference) 방식으로 산출하며, 위성 시계와 수신기 시계 오차를 모두 제거할 수 있어 대부분의 측정치 오차 모델링 방식으로 활용되고 있다. 하지만, 반송파 위상 보정 정보 내에는 미지정수가 존재하며, 이를 정확히 결정하는 것이 핵심기술이다. 국내의 경우, 표 1과 같이, MBC에서 GNSS 기준국들의 측정값들을 DMB 또는 4G/5G 등 IP 전송방식을 활용하여 제공하는 MBC RTK 기술을 서비스하고 있다. 국내 상용화된 네트워크 RTK 기술은 관측된 오차 정보를 그대로 사용하는 방식(OSR: Observation Space Representation)으로 기준국과 이동체의 거리가 멀어질수록 측위 성능이 떨어진다.
표 1 MBC RTK의 지역별 정확도 품질조사 결과
| 구분 |
RMSE |
||
|---|---|---|---|
| △N | △E | △Ell.h | |
| 강원권 | 0.026 | 0.024 | 0.066 |
| 수도권 | 0.016 | 0.019 | 0.050 |
| 경상권 | 0.026 | 0.021 | 0.068 |
| 전라권 | 0.028 | 0.019 | 0.050 |
| 충청권 | 0.030 | 0.028 | 0.057 |
PPP 기술은 OSR 방식을 개선한 SSR(State Space Representation) 방식으로 적은 수의 기준국으로 넓은 서비스 영역 확보가 가능하도록 한다. SSR 방식은 위성 신호 전파 경로상의 오차 성분을 모델링하여 보정 정보를 생성하는 방식으로, 위성 궤도 오차, 위성 시계 오차, 위성 신호의 바이어스 오차는 고정된 값이다. 전리층 오차는 이중주파수를 이용한 무전리층 조합으로 제거하기 때문에 최소 이중주파수 수신기를 사용해야 하며, 정확한 수평 정확도(20cm 이하, 95%)에 도달하기 위해서는 일정 시간이 필요하다.
일본에서 운영하는 위성항법시스템 QZSS(Quasi-Zenith Satellite System)는 PPP-RTK 방식의 CLAS(Centimeter Level Augmentation Service) 위치 보정 서비스이다. 2010년 첫 번째 위성 이후 현재는 총 4기 위성으로 일본 및 인근 지역을 대상으로 측위 정보를 제공하고 있다. 중국은 2020년 7월부터 PPP 기반의 중국 위성항법시스템인 BeiDou를 본격적으로 운용 중이다. 총 27기의 위성이 운영되고 있으나, B2B 주파수 대역으로 보정 정보를 전달하는 방식으로 중국 영토로 서비스 영역이 제한된다. 또한, 표 2와 같이 수평 정확도 95%에 도달하는 데 20분 정도의 소요 시간이 필요하여 드론 정밀 측위 기술로는 아직 적절하지 않다.
표 2 BeiDou PPP 서비스 성능
2. 영상 기반 측위 기술
영상 기반 측위 기술은 Single, Stereo, 그리고 RGB-D 카메라, LiDAR 등을 활용한 측위 기술로 분류할 수 있다. Single 카메라는 3차원 공간 정보를 2차원으로 투영하여 이미지를 만들어 낸다. 이에, Single 카메라 기반 측위 기술은 일반적으로 연속적인 이미지 사이에서 공통으로 인식/탐지된 특징점 간 기하학적 관계를 이용하여 측위를 수행한다. 에피폴라 기하학(Epipolar Geometry)은 2개의 카메라 이미지 사이에 정의되는 기하학 관계를 정의하며, 이를 활용하여 두 카메라 사이의 위치 및 자세 관계를 구할 수 있다. 즉, 연속적인 이미지에 에피폴라 기하학 적용과 이를 누적하여 항법을 수행할 수 있다. 앞서 언급한 바와 같이 Single 카메라는 2차원으로 투영된 이미지를 기반으로 하므로 3차원 공간에 대한 스케일을 추정할 수 없어, 관성 센서 또는 다른 센서와 함께 측위에 주로 활용된다.
Stereo 카메라 기반 측위 기술은 2대의 카메라를 활용한다. 사람의 눈이 거리를 판단하는 원리를 기반으로 두 개의 2차원 이미지에서 깊이 정보를 추출하여 3차원 공간 좌표를 생성할 수 있다. 즉, 두 이미지 사이 존재하는 공통된 객체의 위치 차이를 이용하여 드론과 물체 사이의 거리를 측정하는 데 이용한다. 여기서, 두 이미지 내 공통된 객체를 추적하고 있음을 판단하여야 하며, 이를 위해 Stereo Matching 알고리즘이 활용된다. 이 알고리즘을 기반으로 두 이미지 간의 차이를 합산하여 이미지 간 유사성을 판단한다. 두 이미지 내 공통된 객체의 위치 차이를 계산하는 방법으로는 삼각함수(Trigonometric Function)[4]와 유클리드 기하학(Euclidian Geometry)을 기반으로 한다[5]. 두 이미지 내 객체의 위치 차이와 카메라 초점, 그리고 베이스라인(Baseline)을 통해 3차원 공간에서의 깊이 정보를 산출할 수 있다. 하지만, 베이스라인의 길이가 짧은 경우, 거리가 먼 곳의 이미지 간의 차이가 매우 작아 3차원 정보의 정밀도가 매우 떨어진다.
RGB-D 카메라는 색(R: 적색, G: 녹색, B: 청색)영상과 깊이 정보를 제공한다. 여기서 깊이 정보는 적외선 신호의 송수신 시간 차이(TOF: Time of Flight)를 기반으로 계산한다. Stereo 카메라와 달리 TOF를 기반으로 직접 깊이 정보를 계산하기 때문에 더욱 빠르게 3차원 좌표를 계산할 수 있다. 하지만, 10~20m 정도의 비교적 짧은 거리 내의 깊이 정보를 얻을 수 있어, SLAM(Simultaneous Localization and Mapping)과 같이 RGB 기반의 3차원 공간 정보 생성에 많이 활용되고 있다[6].
LiDAR는 직진성이 강한 고출력 레이저 펄스를 이용해 반사 지점과의 거리를 측정하는 방식이다. LiDAR 장치에서 출력된 레이저의 TOF를 측정하여 거리를 계산하며, 이를 기반으로 주변에 대한 3차원 공간 정보를 생성할 수 있다. 여기서, LiDAR 장치를 통해 측정한 거리 정보를 지도에 매칭시키는 것이 가장 중요하다. 매칭 기술로는 한 대상물에 대해 서로 다른 지점에서 스캔 된 두 개의 포인트를 정합하는 알고리즘(ICP: Iterative Closest Point)과 스캔 포인트의 구역별 확률적 분포를 기반으로 매칭하는 알고리즘(NDT: Normal Distribution Transformation)이 있다. 이처럼 스캔 데이터 전체를 이용하는 방식은 처리 속도가 매우 느려 LOAM(Lidar Odometry and Mapping) 등 스캔 정보 내 특징점을 추출하여 처리 속도를 향상한 매칭 방식이 있다[7]. ICP, NDT, 그리고 LOAM 등 정합 방식별 평균 매칭 오차는 0.45m, 0.30m, 그리고 0.39m로 큰 차이는 없으나, LOAM과 같은 특징점 기반의 방식은 빠른 처리가 가능하고 정밀한 측위 성능을 보이기 때문에 많은 기관에서 이를 활용한 연구 개발을 진행하고 있다.
3. 무선 신호 기반 측위 기술
무선통신기술은 드론의 안전한 운용을 위한 필수적인 요소이다. 특히, 3GPP에서는 무인 비행체 운용을 위해 LTE와 5G의 이동통신 네트워크에 대한 표준화를 진행하고 있다[8-13]. 최근 드론의 활용도가 높아짐에 따라 도심 공간에서의 운용 필요성도 함께 증가하고 있다. 이동통신 네트워크는 GNSS 신호와 달리 도심 공간에서의 높은 수신 신호 세기와 많은 수의 기지국이 설치되어 있다. 이에, GNSS 활용 정밀 측위 기술의 성능이 떨어지는 지역에서의 보조 기술로 LTE 및 5G 네트워크를 활용한 정밀 측위 기술에 관한 연구가 주목받고 있다. 현재까지 이동통신 네트워크 신호를 활용한 측위 기술은 이동체 측위를 위해 주로 수신 신호의 기지국 위치를 활용하는 Cell-ID 방식과 신호의 수신 방향(AOA: Angle of Arrival), 신호의 수신/도달 시간(TOA: Time of Arrival), 신호의 상대적인 수신/도달 시간(TDOA: Time Difference of Arrival) 등 정보를 기반으로 삼각측량을 수행하였다. 기존 측위 방식은 50m~수 km에 이르기까지 오차가 매우 크기 때문에 자율주행 드론에 적용하기엔 부족한 측위 성능을 보인다.
앞서 언급한 RTK 기술이 센티미터 수준의 측위 정확도를 보일 수 있는 것은 Carrier Phase 측정치를 활용해서 가능한 것이다. 최근 LTE 신호를 이용하여 거리 정보를 추출하기 위한 수신기(SDR: Software-Defined Receivers) 연구가 진행되며, RTK 기술과 같이 LTE 신호를 활용하여 센티미터 수준의 측위 정확도가 가능하게 되었다. 하지만, GPS에서 활용되는 다중 전송 주파수의 위상 측정 방식은 LTE 통신망에 그대로 적용하기 어려우므로, Cycle Slip 문제를 해결하는 것이 가장 중요하다.
수신된 LTE 신호로부터 Carrier Phase, Code Phase, 그리고 도플러 주파수 측정치를 생성할 수 있는 LTE SDR을 활용하여 LTE 신호를 활용한 무인 항공기의 정밀 측위가 가능하다[14]. LTE eNodeB의 다중 안테나로부터의 반송파 위상 측정값을 사용하여 Cycle Slip 탐지가 가능하며, IMU와 GNSS-RTK 결합 측위 기술 대비 수집 센티미터 수준의 위치 오차를 나타내는 것으로 파악된다.
단일 LTE 신호가 최대 20MHz 대역폭을 갖지만, 5G 신호는 mmWave 대역에 대해 최대 400MHz 대역폭을 가지며, Beamforming 기술과 Small Cell 구조로 Multipath 오차에 덜 민감한 장점이 있다. SDR의 5G PSS(Primary Synchronization Signal)와 SSS(Secondary Synchronization Signal) 신호의 모든 동기 신호가 하나의 최종 신호로 결합하는 주파수 및 시간 영역에서 OFDM(Orthogonal Frequency Division Multiplexing) 기반 5G 신호의 직교 특성을 이용하여 반송파 위상 측정이 가능하다[15]. LTE 신호 기반 정밀 측위 기술이 센티미터 수준의 오차를 보이는 반면, 5G 신호 기반 정밀 측위 기술은 아직 미터급 오차를 나타내는 것으로 파악된다.
LTE 및 5G 이동통신 네트워크 이외에도 Wi-Fi [16], Bluetooth [17], UWB [18] 등 신호 Timing 정보 또는 신호 세기 기반의 거리 정보를 활용한 정밀 드론 정밀 측위에 관한 연구가 진행 중이다. 다만, 사용 RF 신호의 Coverage 문제로 측위 대상 공간이 대부분 실내로 한정된다.
4. 복합 측위 기술
앞서 언급한 바와 같이 드론의 정밀 측위에는 주로 RTK 등 위성 기반 측위 기술이 활용되고 있다. 하지만, 도심 공간에서의 비행 및 이착륙에 있어 RTK는 LOS 영향을 극복하기 매우 어렵다. LOS 및 위성 신호 Jamming 문제에 대한 강건성을 위해 GNSS와 함께 주로 영상 또는 무선통신 신호를 활용한 측위 기술 복합 측위를 수행한다.
GNSS와 함께 복합 측위 기술로 가장 많이 활용되는 기술은 관성 센서 기반의 INS(Inertial Navigation System) 기술이다. 드론의 자세제어를 위하여 주로 탑재되는 관성 센서로는 가속도 및 자이로 센서가 있다. 가속도를 적분하여 속력을 추정하고, 각속도를 적분하여 방향 변화를 탐지할 수 있다. 관성 센서와 함께 지자기 센서를 활용하여 이동체의 속도 및 진행 방향을 누적하여 현재 위치를 추정할 수 있다. 다만, 변위 누적을 기반으로 한 INS 기술은 누적오차(Drift Error) 문제가 존재하며, 이를 해결하고자 주로 GNSS와 약결합 또는 강결합 방식으로 시스템을 구성한다[19].
INS 기술에 활용되는 관성 센서는 일반적으로 다른 센서에 비해 매우 빠른 Sampling 속도를 제공하기 때문에 영상 또는 무선통신 신호를 활용한 측위 기술보다 짧은 시간 동안 정확한 측위 정보를 제공할 수 있다. 이에, GNSS뿐만 아니라 그림 2 및 그림 3에서와 같이 영상, 그리고 무선통신 기반 측위 기술과 주로 함께 활용된다[20,21].


앞서 언급한 바와 같이 INS는 짧은 시간 동안 정확한 측위 성능을 보인다. 하지만, 이와 결합하는 GNSS, 영상 및 무선통신 기반 측위 기술의 성능이 떨어지는 경우 INS만을 의존하기에는 누적오차로 인해 자율주행 성능이 불안정할 수밖에 없다. 따라서, 안정적인 드론의 자율주행을 위해서는 그림 1에서와 같이 다양한 센서 및 측위 기술을 결합한 복합 측위 기술의 적용이 필요하다.
중국의 Jin Kun Innovation 기업에서는 GNSS-RTK, UWB, 영상(Optical Flow), Laser ToF, Barometer, IMU(Inertial Measurement Unit), 초음파 등 복합 센서를 활용한 드론 정밀 측위 솔루션을 제공한다[22]. RTK의 활용 가능 여부에 따라, 이외 센서를 활용한 측위 기술 동작을 정의하여 드론의 측위 안정도를 향상시켰으며, 수십 센티미터 수준의 측위 오차를 나타내는 것으로 파악된다.
Ⅲ. 결론
본고에서는 드론 자율주행을 위한 정밀 측위 기술에 관하여 기술하였다. 현재 드론 정밀 측위에는 위성 기반의 GNSS-RTK 기술이다. GNSS-RTK 기술이 중고도 및 고고도에서는 센티미터 수준의 측위 정확한 측위 성능을 제공하지만, 고도가 낮은 도심 지역에서는 측위 정확도를 보장할 수 없다. 또한, GNSS는 Jamming에 취약하므로 언제든 도심 내에서 드론은 추락할 수 있다. 드론의 안정적인 자율주행을 위해서는 단일 측위 기술이 아닌 다수 센서 또는 측위 기술을 활용한 복합 측위 기술이 필수이다. 특히, 드론 내 통신 기능 중 가장 큰 비중을 차지할 것으로 예상되는 4G/5G 이동통신 네트워크를 활용한 정밀 측위 기술은 향후 드론 정밀 측위 기술에서도 가장 중요한 역할을 할 것으로 기대된다. 따라서, 빠르게 성장하고 있는 드론 자율주행 시장에서 차별성 확보를 위해서는 드론에 기탑재된 여러 센서를 활용한 복합 정밀 측위 기술에 대한 연구 지원 및 원천기술 확보를 위해 더욱 노력해야 할 것이다.
용어해설
GNSS 위성을 이용한 위치 확인 및 항법시스템으로, 대표적으로 미국의 GPS가 있음
GPS 미국이 개발 및 관리하는 위성항법시스템으로, 세계 어느곳에서든 3대 이상의 인공위성에서 신호를 받아 위치를 정확히 계산할 수 있는 시스템
BeiDous 중국의 독자적인 위성항법시스템
eNodeB LTE 이동통신 기지국
GNSS Jamming 위성항법 신호가 사용하는 주파수 대역에 강한 전력의 외부 신호로 수신기 동작에 오작동을 일으키는 전파 교란 기술
약어 정리
AOA
Angle of Arrival
CLAS
Centimeter Level Augmentation Service
GNSS
Global Navigation Satellite System
ICP
Iterative Closest Point
IMU
Inertial Measurement Unit
INS
Inertial Navigation System
LiDAR
Light Detection And Ranging
LOAM
Lidar Odometry And Mapping
LOS
Line of Sight
NDT
Normal Distribution Transformation
OFDM
Orthogonal Frequency Division Multiplexing
OSR
Observation Space Representation
PPP
Precise Point Positioning
PSS
Primary Synchronization Signal
QZSS
Quasi-Zenith Satellite System
RTK
Real Time Kinematic
SDR
Software-Defined Receiver
SLAM
Simultaneous Localization And Mapping
SSR
State Space Representation
SSS
Secondary Synchronization Signal
TDOA
Time Difference of Arrival
TOA
Time of Arrival
TOF
Time of Fligth
V.L. Stouffer et al., "Reliable, secure, and scalable communications, navigation, and surveilance(CNS) options for urban air mobility(UAM)," NASA Technical Report, Aug. 2020.
A. Zaarane et al., "Distance measurement system for autonomous vehicles using stereo camera," Array. vol. 5, 2022, article no. 100016.
X. Sun et al., "Distance measurement system based on binocular stereo vision," IOP Conf. Series: Environ. Earth Sci., vol. 252, no. 5, 2019.
T. Schops et al., "Bad SLAM: Bundle adjusted direct RGB-D SLAM," in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., (Long Beach, LA, USA), June 2019, pp. 134-144.
B. Yang and J. Li, "A hierarchical approach for refining point cloud quality of a low cost UAV LiDAR system in the urban environment," ISPRS J. Photogramm. Remote Sens., vol. 183, 2022, pp. 403-421.
3GPP TR 37.777 v15.0.0, Study on Enhanced LTE Support for Aerial Vehicles(Release 15), 2017. 12.
3GPP TR 23.754 v17.1.0, Study on Supporting Unmanned Aerial Systems(UAS) Connectivity, Identification and Tracking(Release 17), 2021. 3.
3GPP TR 23.755 v17.0.0, Study on Application Layer Support for Unmanned Aerial Systems(UAS), 2021. 4.
K. Shamaei and Z.M. Kassas, "Sub-meter accurate UAV navigation and cycle slip detection with LTE carrier phase measurements," in Proc. ION GNSS+ 2019, (Miami, FL, USA), Sept. 2019, pp. 2469-2479.
A.A. Abdallah and Z.M. Kassas, "UAV navigation with 5G carrier phase measurements," in Proc. ION GNSS+ 2021, (St. Louis, MO, USA), Sept. 2021, pp. 3294-3306.
J.A. Lopez-Pastor et al., "Wi-Fi RTT-based active monopulse RADAR for single access point localization," IEEE Access, vol. 9, 2021, pp. 34755-34766.
G. Ariante, S. Ponte, and G. Del Core, "Bluetooth low energy based technology for small UAS indoor positioning," in Proc. IEEE MetroAeroSpace, (Pisa, Italy), June 2022, pp. 113-118.
S. Lee et al., "Drone positioning system using UWB sensing and out-of-band control," IEEE Sens. J., vol. 6, 2021, pp. 5329-5343.
S. Huang et al., "Research on UAV flight performance test method based on dual antenna GPS/INS integrated system," in Proc. IEEE ICCIS, (Singapore, Singapore), Dec. 2018, pp. 106-116.
B. Nenchoo and S. Tantrairatn, "Real-time 3D UAV pose estimation by visualization," in Proc. IAAI 2020, (Chumphon, Thailand), vol. 39, no. 1, 2020, pp. 1-5.
Z. Li and Y. Zhang, "Constrained ESKF for UAV positioning in indoor corridor environment based on IMU and WiFi," Sensors, vol. 22, no. 1, 2022, pp. 1-18.
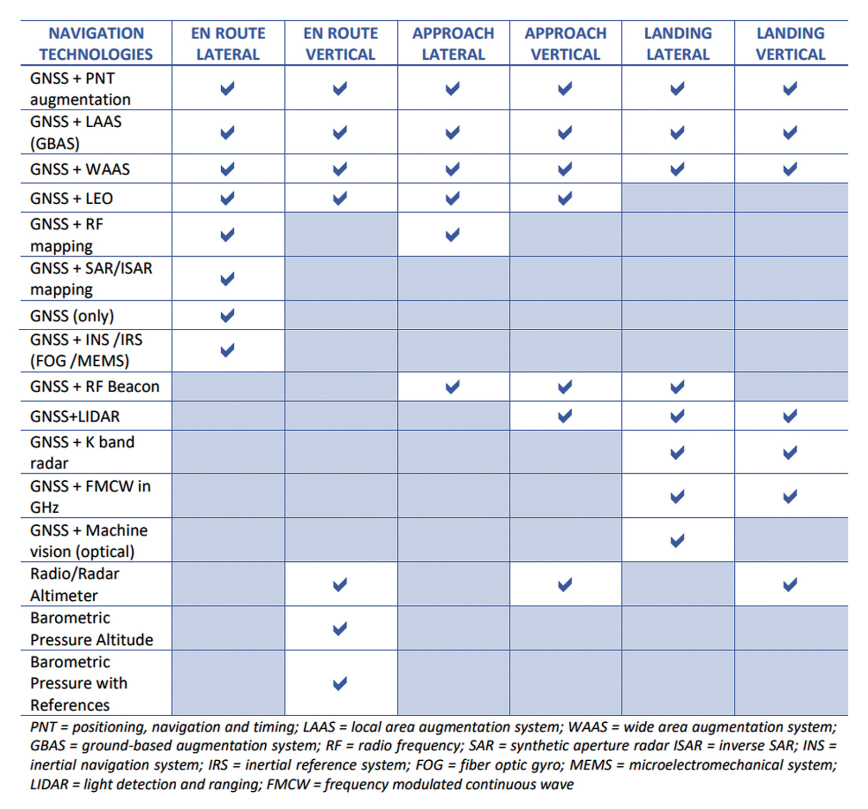

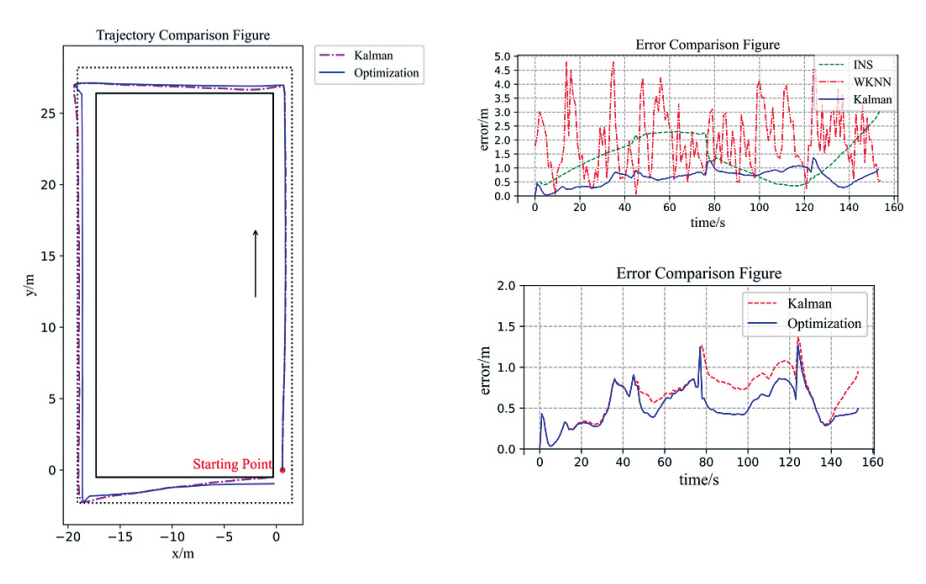
표 1 MBC RTK의 지역별 정확도 품질조사 결과
| 구분 |
RMSE |
||
|---|---|---|---|
| △N | △E | △Ell.h | |
| 강원권 | 0.026 | 0.024 | 0.066 |
| 수도권 | 0.016 | 0.019 | 0.050 |
| 경상권 | 0.026 | 0.021 | 0.068 |
| 전라권 | 0.028 | 0.019 | 0.050 |
| 충청권 | 0.030 | 0.028 | 0.057 |
출처 Reproduced with permission from [2].
표 2 BeiDou PPP 서비스 성능
출처 Reprinted with permission from [3], 공공누리 4유형.
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.