뉴로모픽 감각 인지 기술 동향―촉각, 후각을 중심으로
Neuromorphic Sensory Cognition―Focused on Touch and Smell
- 저자
-
박강호브레인링크창의연구실 pkh@etri.re.kr 이형근브레인링크창의연구실 hklee@etri.re.kr 강유성브레인링크창의연구실 kys1217@etri.re.kr 김도엽브레인링크창의연구실 nanodykim@etri.re.kr 임정욱차세대반도체소자연구실 limjw@etri.re.kr 제창한브레인링크창의연구실 chje@etri.re.kr 윤조호브레인링크창의연구실 joho@etri.re.kr 김정연브레인링크창의연구실 jeongyounk@etri.re.kr 이성규브레인링크창의연구실 hermann@etri.re.kr
- 권호
- 38권 6호 (통권 205)
- 논문구분
- 사람 중심 인공지능과 미래 반도체 기술
- 페이지
- 62-74
- 발행일자
- 2023.12.01
- DOI
- 10.22648/ETRI.2023.J.380607
- 원문정보
-
23/12/14, 원문교체, 2024년 39권 1호 Erratum 발행https://doi.org/10.22648/ETRI.2024.J.390110
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- In response to diverse external stimuli, sensory receptors generate spiking nerve signals. These generated signals are transmitted to the brain along the neural pathway to advance to the stage of recognition or perception, and then they reach the area of discrimination or judgment for remembering, assessing, and processing incoming information. We review research trends in neuromorphic sensory perception technology inspired by biological sensory perception functions. Among the various senses, we consider sensory nerve decoding technology based on sensory nerve pathways focusing on touch and smell, neuromorphic synapse elements that mimic biological neurons and synapses, and neuromorphic processors. Neuromorphic sensory devices, neuromorphic synapses, and artificial sensory memory devices that integrate storage components are being actively studied. However, various problems remain to be solved, such as learning methods to implement cognitive functions beyond simple detection. Considering applications such as virtual reality, medical welfare, neuroscience, and cranial nerve interfaces, neuromorphic sensory recognition technology is expected to be actively developed based on new technologies, including combinatorial neurocognitive cell technology.
Share
Ⅰ. 서론
오늘날 가상 및 증강 현실(VR/AR/MR) 기술의 발달과 더불어 가상 시뮬레이터 그리고 의료용 수술 및 원격 로봇 등 다양한 인간-기계 인터페이스 기술이 발달함에 따라 시각, 청각뿐만 아니라 촉각 및 후각 등의 오감이 가상으로 구현되는 초실감 기술 필요성이 증대되고 있다.
오감이 구현된 기술 적용을 위해서는 인간의 감각 지각에 대한 감각신경의 발화양상 원리에서부터 뇌인지 정보처리까지의 감각신경경로(Sensory Pathway)에 대한 신경생리학적 기전을 규명하고, 이를 활용한 감각신경의 인코딩/디코딩 기술 개발이 필요하다.
특히, 오감 중 촉각과 후각은 인간의 감각 인지에서 외부 사물과의 긴밀한 접촉 상호작용을 통하여 현실감을 부여하는 필수적인 감각이지만 시각, 청각, 촉각과 유사한 성격의 통각 등의 다른 감각에 비해 촉각에 대한 신경생리학적 기전은 명확하게 밝혀지지 않았으며, 이로 인해 촉각의 감각 지각에 대한 뉴로모픽 인코딩/디코딩 분야 기술 개발 수준이 타 감각에 비해 현저히 뒤처져 있다.
촉각의 감각 인지는 피부에 존재하는 촉각수용체(Receptor)에 적용된 촉각 자극의 선택적 검지 및 처리를 통해 이루어지며, 유입된 촉각 정보들은 구심 경로(Afferent Pathway)를 통하여 대뇌 피질에 전달되어 처리되며, 촉각 정보를 수용할 수 있는 기계적 촉각수용체는 압력과 진동이 존재하며 각각의 촉각 정보는 느린 적응(SA: Slow Adaptive)과 빠른 적응(RA: Rapid Adaptive) 신경을 통하여 대뇌 피질의 체성 감각(Somatosensory) 뉴런으로 전달되어 처리된다. 즉, 질감 정보 자체를 수용할 수 있는 수용체가 부재하기 때문에 압력과 진동 수용체에 전달된 정보들의 조합을 통하여 질감과 같은 복합 촉각 자극 정보를 처리할 수 있다(그림 1(a)).
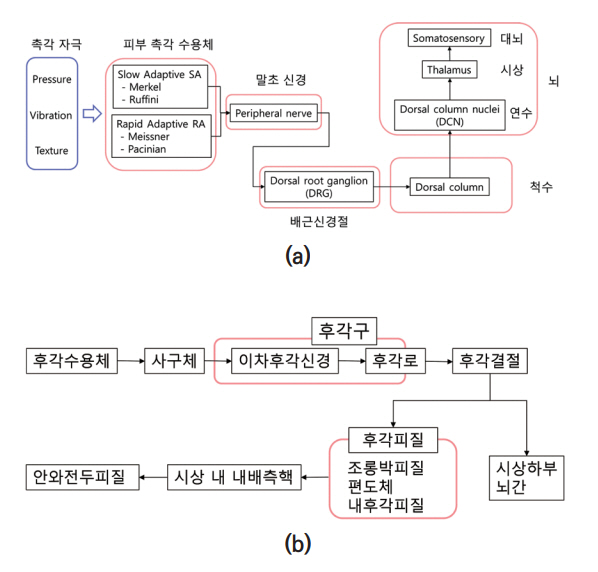
후각은 상한 음식이나 유해한 가스에 대한 경고를 해주는 기능뿐만 아니라 동물의 경우 페로몬을 통한 동물의 번식, 영역표시, 상대방에 대한 공격 또는 항복 의사표현 등에 활용된다[1]. 후각신경은 12개로 명명된 뇌신경 중 제1뇌신경이며, 후각신경에 의해 후각 감각이 동작한다. 후각 감각의 경로에 대해서 알아보고 각각의 경로상에서의 후각 관련 신호를 파악하게 되면, 향후 뉴로모픽 감각 인지 기술개발에 활용 가능할 것으로 예상된다. 냄새에 대한 정보는 비강(Nasal Cavity)의 상피세포에서부터 경로가 시작된다. 전반적인 경로는 그림 1(b)에서와 같이 상피세포 내에 존재하는 “후각수용체 세포(Receptor Cell) > 후각신경(Olfactory Nerve) > 후각구(Olfactory Bulb) > 후각로(Olfactory Tract) > 후각 결절(Olfactory Tubercle) > 후각 피질(Olfactory Cortex) 또는 전교련(Anterior Commissure) > 기타 뇌 영역 신경”의 순서로 이루어진다[2].
후각 물질이 후각수용체 단백질과 결합하면, 양이온/음이온 채널의 개폐가 이루어지고, 이로 인해 후각 물질 정보가 생체 전기신호로 변환된다. 다수의 후각수용체에서 발생한 감지신호는 후각 상피 세포와 사상판(Cribriform Plate)을 거쳐 후각구에 모인다. 후각구에는 수많은 후각신경 축삭의 말단이 모여 사구체(Glomeruli)라고 불리는 구조체를 이룬다. 설치류의 경우 지름이 50~200μm 정도이며, 약 2천 개 정도 존재한다. 사구체에는 약 2만 5천 개 정도의 후각신경 축삭말단이 100개 정도의 이차 후각 신경의 수지말단과 시냅스를 이룬다. 생체 내의 후각 시스템은 특정 후각 자극을 부호화하기 위해 여러 후각수용체로부터의 반응을 조합하고 패턴으로 인식한다. 현재까지는 해부학적, 전기생리학적 연구와 전달물질 연구 등을 통해 후각 시스템에 대한 많은 이해가 이루어지고 있으나, 냄새 물질의 인지 및 인체에 대한 내분비 기능과 행동에 미치는 영향에 대한 연구는 미진한 상태이다. 후각상피에서 얻은 후각 정보는 이차 후각신경의 축삭을 통해 후각로를 따라 후각 피질을 포함한 다양한 뇌 영역으로 전달된다. 후각 신호를 직접 전달받는 후각 피질은 단일 구조가 아니라 여러 뇌 영역의 조합으로 이루어져 있다. 예를 들어 조롱박 피질(Piriform Cortex), 편도체(Amygdala), 내후각 피질(Entorhinal Cortex) 등의 다양한 대뇌 피질(Cerebral Cortex)의 조합이고, 이들 후각 피질의 후각 정보는 시상(Thalamus)을 거쳐 전전두 피질(Prefrontal Cortex)의 일부인 안와전두 피질(Orbitofrontal Cortex)에 보내지고, 또한 식욕, 타액 분비, 위장 움직임 등의 자동반사적인 반응에 관련된 시상하부(Hypothalamus) 또는 뇌간(Brainstem)에 후각 정보가 전달된다. 일부 후각 정보는 후각 결절에서 분기되어 전교련으로 전달되며, 해당 영역은 냄새 이외에도 고통, 기억, 감정, 청각 등의 감각과 관련된 역할을 하는 영역으로 알려져 있다.
후각 감각이 다른 감각과 관련된 뇌 영역과 연결되어 있고, 고차적인 정보로 변환될 수 있다는 점은 후각이 우리의 인지 및 감정 체험에 중요한 역할을 하는 것을 보여준다. 이러한 이해는 인지 장애와 관련된 질병의 초기 증상과 후각 감각의 상실 사이의 연관성을 설명하는 데에 도움이 된다. 또한, 후각 감각의 모방을 위해 다양한 과학적 기술을 개발하는 것은 가상현실, 의료 분야에서의 활용 가능성을 열어줄 것이다. 후각 감각과 관련된 연구는 미래에 뇌-기계 인터페이스, 신경과학, 의료과학 등 다양한 분야에서 계속해서 진전되고 발전될 것으로 기대된다.
Ⅱ. 감각 디코딩 기술
감각 디코딩(Sensory Decoding)이란 뉴런과 시냅스로 구성된 생물학적 신경계의 스파이크 신호 전달 체계를 분석하여 감각 정보 처리 방식을 이해하는 과정을 의미한다. 감각 디코딩 기술은 로봇 및 신경공학 관련 응용 분야에서 인공 감각을 구현하기 위한 핵심 기술로 활용이 가능하다. 이 장에서는 최근 발표된 감각 디코딩 기술 관련하여 촉각과 후각 관련 연구 동향을 소개한다.
촉각 신경 디코딩 연구로, 2021년 미국 Harvard Medical School 연구팀에서는 생쥐의 앞발과 뒷발의 저임계 기계 자극 수용체(LTMR: Low-threshold Mechanoreceptor)의 수용 필드(Receptive Fields) 분포와 기계 자극에 대한 반응 민감도에 관한 연구 결과를 보고하였다. 자극의 유지 시간은 0.5초, 자극의 세기는 1~75mN 범위에서 수행되었으며, 일차 감각 뉴런(Primary Sensory Neuron)에서 발생한 SA 신호와 RA 신호가 하부 체성 감각 시스템(Subcortical Somatosensory System)을 통해 대뇌 피질로 전달되는 실험의 결과를 보였고, 선택적 광유전 조작을 활용하여 S1 영역과 VPL 영역 신호의 상관관계를 보고하였다[3].
이어 2022년 미국 Harvard Medical School 연구팀은 생쥐 뒷발바닥의 10~500Hz의 진동 자극 실험을 통해 LTMR과 더불어 PSDC(Postsynaptic Dorsal Column) 뉴런의 신호도 촉각 자극 전달에 기여한다고 보고하였다. LTMR은 피부에서 발생하는 미세 진동이나 촉감을 인식하는 반면, PSDC는 촉감의 시작 시점과 지속적인 접촉의 강도를 주로 인식하며, DCN(Dorsal Column Nuclei)에서 통합되어 촉각을 인식한다고 보고하였다[4].
촉감은 진동감(Vibration), 압력감(Pressure) 이외에도 표면이 부드러운지, 거친지, 뾰족한지 등을 느끼는 질감(Texture)으로도 구분할 수 있다. 2019년 미국 시카고대학 연구팀은 원숭이에게 59가지의 서로 다른 질감을 가지는 표면을 80mm/s 속도로 제공하면서 오른팔의 정중신경(Median Nerve)과 척골신경(Ulnar Nerve), 대뇌 피질의 S1 영역의 스파이크 신호를 측정하였다. S1 영역을 브로드만 영역에 따라 1, 2, 3영역으로 구분하였을 때, 표면 질감에 따라 모든 영역에서 스파이크 발화율의 차이가 존재한다는 연구 결과를 보고하였다. 또한, 오른팔 신경 다발에서는 SA, RA와 파치니소체(PC)의 특성을 가지는 신호가 측정되었는데, 표면의 거칠기 정도에 따라 coarse한 표면에서는 SA 수용체가 더 민감하게 반응하고, fine한 표면에서는 PC 수용체가 더 민감하게 반응한다고 보고하였다[5].
국내에서는 2023년 UNIST 연구팀에서 long-term으로 자극되는 SA 수용체의 스파이크 발화 패턴 모델을 제안하였다. 기존의 Izhikevich 뉴런 모델이 long-term으로 자극되는 SA 수용체에 적용하였을 때는 오차가 크게 나타남을 보이고[6], 지수 회귀 함수 형태의 long-term 스파이크 발화 패턴 모델과 작용하는 압력 자극의 크기에 따른 회귀 함수 모델의 최적 계수를 보고하였다. 실제 설치류에서 실험을 통해 획득한 SA 수용체의 발화 패턴과 long-term 지수 회귀 분석 모델, Izhikevich 모델을 각각 비교하여 long-term 지수 회귀 분석 모델의 스파이크 발화율 최댓값과 steady-state 상태의 발화율이 실험의 결과와 유사함을 보고하였다[7].
ETRI는 뇌에서 감각을 인지하기까지 전기 신호 형태의 스파이크 신호가 감각 정보를 전달하는 특성을 이용하여, 미세 전류를 통한 전기 자극으로 가상 촉감을 구현하는 방법을 제안하였다. 설치류의 SA 수용체에서 측정한 long-term 스파이크 발화 패턴 모델을 기반으로 압력 자극 세기에 따른 스파이크 발화 패턴의 DB를 구축하고, 통계 분석 기반으로 전기 자극을 통한 가상 촉각 인코딩 모델을 제안하였다[8]. 촉각 인코딩 모델을 기반으로 전기 자극을 통한 가상 촉각 인코딩 모델의 유효성을 검증하기 위해, S1 영역 혹은 VPL 영역에서 발현되는 스파이크 신호가 기계 자극을 주었을 때와 동일하게 발현되는지 확인하는 유효성 검증 실험을 수행 중이다.
후각신경 디코딩 연구는 촉각, 청각, 시각 등의 다른 감각 기관에 비해 상대적으로 주목을 덜 받아왔으나, 2004년에 Richard Axel과 Linda B. Buck의 후각수용체가 후각을 어떻게 뇌로 전달하는가에 대한 추적 연구(Odorant receptors and the organization of the olfactory system)가 노벨 생리·의학상을 수상하였고, 이후 후각 연구에 관한 관심이 늘어나며 연구 활동이 활발해지고 있다[9].
후각에 관한 연구는 후각 자극 물질(Odorant)을 감지(Detection)하는 후각수용체부터 후각신경 전달 및 정보처리 과정(Decoding), 자극에 대한 인지(Perception), 후각 시스템의 가소성(Plasticity)에 이르기까지 다양하게 진행되고 있다.
일반적으로 후각 자극 물질은 비강에서 후각수용체 세포에 의해 감지된 후, 활동 전위(Action Potential)가 후각 경로를 통해 중추 신경계로 전달되며, 특히 뇌의 후각 피질(Olfactory Cortex)에서 이 정보가 해석되고 냄새를 인식하게 된다. 이러한 후각 자극 물질을 인지하는 과정에서 단일 물질과 혼합 물질에 대한 반응은 다르게 작용할 수 있다. 단일 물질에 대한 후각 반응은 주로 해당 물질의 화학적 특성과 관련이 있으며, 특정한 화학 구성 또는 분자의 형태가 특정한 후각수용체와 상호작용하여 냄새를 인지하게 된다. 반면, 다분자 혼합 물질에 대한 후각 반응은 다양한 물질이 함께 존재하는 경우로, 각 물질의 특성이 복합적으로 작용하게 된다. 이는 후각의 인지에 영향을 미칠 수 있으며, 어떤 물질은 다른 물질의 인식을 억제하거나 증폭시킬 수도 있다[10,11]. 현재까지의 연구로는 단일 물질이 여러 개의 후각수용체를 동시에 자극할 수 있으며, 한 개의 후각수용체가 다분자 혼합 물질에 의해서 동시에 자극될 수 있는 것으로 알려져 있다[12]. 따라서 다양한 냄새 분자가 함께 섞여 있는 경우, 여러 후각수용체가 동시에 자극되며, 후각 시스템에서 발생하는 복잡한 정보처리 과정으로 인해 이러한 혼합 물질이 어떻게 인식될 것인지는 더욱 이해하기가 쉽지 않다.
후각수용체의 구조 모델링 연구와 관련하여 Horst Pick 교수 연구팀은 마우스 eugenol 수용체(mOR-EG)를 이용하여 서로 다른 냄새 분자를 결합하고 구별하는 방법에 관해 연구하였다. 이 수용체는 다양한 후각 자극 물질에 대해 민감하게 반응하며, 그 반응성을 조절하기 위해 구조적으로 다양한 조정을 할 수 있음이 밝혀졌다[13]. Anandasankar Ray 교수 연구팀은 컴퓨터 시뮬레이션(In silico)을 사용하여 다양한 후각 자극 물질과 후각수용체 간의 화학적 상호작용을 모델링하고 디코딩하는 방법을 개발하였다. 이 방법을 통해 후각수용체에 반응할 만한 후보 화합물들을 찾아내었고, 예측된 화합물의 약 71%가 실제로 수용체를 활성화하거나 억제하는 것으로 확인되었다[14].
후각 인지 연구와 관련하여서 Jay A. Gottfried 교수 연구팀은 기능적 자기공명영상(fMRI: functional Magnetic Resonance Imaging)을 이용하여 냄새 감지와 인식의 뇌 기작, 특정한 냄새가 기억과 연결되는 방식에 대해 규명하고자 지속적인 연구를 진행해오고 있으며, 최근에는 인간의 후각에 대한 보다 정밀한 생리학적 이해를 도출하기 위해 fMRI와 더불어 두개강내 뇌파 검사(iEEG: intracranial Electroencephalography)를 이용함으로써 우수한 시간적, 공간적 해상도를 제공하는 연구 방법론을 제시하였다[15].
미세 전극을 뇌 내부에 삽입하여 후각 자극에 따른 특정 뇌 영역의 전기 신호를 분석하는 연구도 활발히 진행되고 있다. Fan 등은 microelectrode arrays를 이용하여 마우스의 공포 상황에서 medial amygdala 영역의 전기생리학적 활동을 조사하였다. 뉴런의 스파이크 발화율(Firing Rate)과 δ(1~4Hz) 및 θ(4~8Hz) 주파수 영역의 local field potential이 천적 냄새(2,4,5-dihydro-2,5 Trimethylthiazoline, TMT)에 노출된 이후 증가하였으며, medial amygdala 뉴런이 공포 감정을 암호화하는 신경 정보의 전달에 관여할 수 있음을 보고하였다[16].
최근 CBRAIN(Collective Brain Research platform Aided by Illuminating Neural activity)이라는 새로운 군집 뇌과학 솔루션이 보고되었으며, 한국전자통신연구원에서는 이를 마우스 후각 연구에 활용 중에 있다[17]. 해당 플랫폼은 쥐의 머리 위에 장착할 수 있도록 3g 이하의 초소형 디바이스로 구현되며, 저연산 알고리즘 및 특징점 추출 알고리즘(Interest Point Extraction Algorithm)을 통해서 실시간으로 뇌파 분석 및 다양한 뇌파 상태를 LED로 시각화가 가능한 특징을 가지고 있다. 또한, 기존의 유선 시스템의 경우 행동 제한이 없는 다수 개체의 동시 관찰이 어려웠으나, CBRAIN은 무선 데이터 통신기술을 통해서 자유로운 행동과 뇌신호를 동시에 획득 가능하다. 이에, 특정 후각 자극 물질에 대해 단일 개체의 반응뿐만 아니라 여러 개체의 사회적 상호작용을 행동학적 및 전기생리학적 분석법을 활용하여 연구 중에 있다. 이와 더불어 fMRI를 이용하여 뇌기능 활성 영역 탐색 및 뇌기능의 연결성 분석에 관한 연구도 함께 진행되고 있다. 이를 통해 후각 자극에 기인하는 군집 뇌-행동 모델 정립에 활용할 수 있을 것으로 예상된다.
Ⅲ. 뉴로모픽 디바이스
1. 뉴로모픽 뉴론 및 시냅스 소자
현재의 컴퓨터는 폰 노이만이 제안한 연산장치와 메모리를 중심으로 데이터를 입출력하는 방식으로 작동하고 있지만, 연산이 복잡해지고 데이터가 늘어날수록 발열과 전력소모도 커진다. 반면, 인간의 뇌는 전구 하나를 밝힐 수 있는 20와트 정도의 에너지만 쓸 정도로 에너지 소비를 최소화한다. 따라서 생체 스파이크 신경망을 활용한 뉴로모픽 컴퓨팅에 관심이 점점 높아지고 있다.
현재 인공신경망은 신경 구조를 소프트웨어적으로 구현한 것이 대부분이지만 뉴로모픽 컴퓨팅은 실제 생명체의 뉴런과 시냅스를 모방한 하드웨어를 활용하고 이에 최적화된 소프트웨어를 개발해 적용하는 것을 목표로 하고 있으며, 모든 칩이 병렬로 서로 연결되고 폰 노이만 구조와 달리 연산과 메모리가 분리되지 않아 매우 큰 장점을 갖고 있다.
뉴로모픽 디바이스는 인간의 두뇌를 모사하는 소자로, 인간의 두뇌와 신경이 뉴런과 시냅스로 구성되어 있기 때문에 크게 뉴런 소자와 시냅스 소자로 연구가 진행되고 있다. 현재는 저전력과 고속 및 단순한 구조를 달성하기 위하여 비실리콘계의 소재를 활용하여, 하나의 MIM 혹은 트랜지스터 소자로 뉴런 소자와 시냅스 소자를 구현하고 있다. 하지만, 실제 양산에 적용되기 위하여 기존의 반도체 공정의 생산라인을 그대로 활용할 수 있는 CMOS 호환성을 갖추는 소재를 발굴하는 것이 핵심적으로 중요하다[18-20].
뉴런 소자의 경우, 입력된 자극이 축적되고 임계값 이상의 전압을 충족하면 발화(Fire)하는 특성을 보이는 소자의 특성이 요구되며, 기본적으로 이러한 소자는 휘발성(Volatile)을 갖는 소재이어야 한다. 반면에 시냅스 소자의 경우, 자극의 전달을 통해 가중치가 변화하고 이를 기억하면서 학습하는 형태의 소자 특성이 요구되고, 이를 충족하기 위해서는 비휘발성(Non-volatile)을 갖는 소재 발굴이 요구된다. 이러한 뉴런 소자와 시냅스 소자의 상반되는 요구 특성에도 불구하고 비슷한 특성을 가진 소자들이 양쪽에 모두 적용되어 온 사례가 많다.
뉴런 소자의 경우, 전기 자극이 누적되어 특정 임계값 이상에서 발화하므로 Integrate-Fire(IF) 혹은 Leaky-Integrate-Fire(LIF)의 바이오에서의 거동을 보이는 소자로 구성되었다. 하나의 소자 구동으로 2단자인 MIM이나 3단자인 트랜지스터로 구동이 가능한 뉴런 소자는 강유전체(Ferroelectric) 소자, magnetic tunnel junction 소자, 상변이(Phase-change) 소자, 멤리스터 소자, 금속-절연체 전이 소자 및 Ovonic Threshold Switch(OTS) 등이 연구되고 있다[18,21]. 뉴런 소자는 시냅스 소자와 연결되어 뉴런-시냅스-뉴런의 연결 구조를 갖고 있으며, 그림 2에 묘사되어 있다.

다양한 뉴런 구조에 따라 입력이 전압이 되거나 전류가 될 수도 있고, 출력도 마찬가지이다. 하지만, 실제의 생물학적 신경구조를 모사하는 뉴런-시냅스-뉴런-시냅스의 구조에서는 뉴런 소자의 입력은 시냅스의 전류 출력을 입력 신호로 받아서 다시 시냅스로 전압 출력으로 보내는 것이 바람직하다. 상변이 소자나 강유전 소자의 경우는 전압을 입력으로 받으므로 이 경우에는 전단 시냅스에서 들어오는 전류에 저항을 달아서 전압으로 변환하는 것이 요구된다.
시냅스 소자의 경우에는 뉴런 소자보다 더 활발히 연구가 진행되고 있는데, 초기에는 2단자의 멤리스터 소자, 상변이 소자, 강유전 소자 등이 주로 연구되었지만, 최근에는 3단자로 floating gate 소자, 강유전 게이트 소자, 전해질 게이트 소자, 상변이 소자 및 전하 트랩 소자 등이 연구되고 있으며, 중요한 성능 인자들은 동작 전압, 동작 속도, dynamic range, conduction state의 수, 학습의 선형성과 대칭성 및 내구성 등이다[19,20,22]. 시냅스 소자로 다양한 2단자와 3단자 소자가 시도되었는데, 대체적으로 2단자 소자는 낮은 동작전압과 단순한 구조가 장점이지만 3단자와 같은 다양성의 부재와 내구성이 취약하다는 단점이 있다. 표 1은 다양한 유형의 시냅스 소자의 특성을 보여준다.
표 1 다양한 인공 시냅스 소자의 구조와 특성 요약
이 표에 나와 있지 않지만, 선형성과 강화 학습과 억제 학습 사이의 대칭성도 학습 과정에서 정확한 예측에 있어 매우 중요한 성능 지수이다.
또한, 최근에는 ETRI에서 계면의 deep trap을 전하 포획층으로 활용하여 시냅스 특성을 얻었는데, 전기와 광 자극에 모두 반응이 가능하며 CMOS 호환성을 갖추고 1,024개 이상의 state를 구현하면서 매우 우수한 선형성을 보인 결과를 발표하였다[19].
현재는 이러한 뉴런과 시냅스 소자를 하나의 게이트 어레이에서 구현하려는 노력이 시도되고 있고, KAIST에서 발표한 최근 논문에서는 뉴런 소자와 시냅스 소자를 적층한 구조를 만들어 동시 구현이 가능하게 하였다[23]. 머지않아 인간의 두뇌와 신경망처럼 뉴런 소자와 시냅스 소자가 그물망처럼 연속적으로 연결되어 SNN 방식의 구동을 수행할 소자의 개발이 가능할 것으로 보인다.
2. 뉴로모픽 센서 소자
감각 기관과 뉴로모픽 소자를 연계한 뉴로모픽 센서 연구가 활발하다. 인간은 눈, 귀, 코, 피부, 입 등 오감 기관을 통하여 사물을 인지하고 구별할 수 있으며, 뉴런은 오감 정보를 감지하면 지속시간이 짧은 전기 신호인 스파이크로 만들어 다른 뉴런과 정보를 주고받으며 시냅스는 이런 뉴런 간 정보 교환의 연결고리로서 전달 과정에서 시냅스의 이온 분포와 도파민, 세로토닌 등의 신호전달물질을 포획하는 수용체 농도가 변하며 학습과 기억이 동시에 진행된다. 오감을 감지하는 뉴로모픽 센서 디바이스도 이러한 뉴런의 감지 방식을 모방하는 구조를 채용하는 방식으로 연구가 발전되고 있다. 대표적인 예로, 인공적인 감각 메모리 디바이스(Artificial Sensory Memory Device)는 감각 뉴런의 수용체, 축삭 돌기, 시냅스를 모방하여 센서, 감각경로, 메모리로 이루어진다(그림 3).

2017년 중국 북경대학 연구팀에서 제안하는 뉴로모픽 촉각 디바이스의 경우에는 압력을 감지하는 센서와 저항형 스위칭 메모리 디바이스를 기반으로 제작되거나 압력을 감지하여 자극의 정도를 전기적인 신호로 변환하고 유기적인 시냅틱 트랜지스터에 의해서 터치 속도를 인지하는 연구 결과를 보고하였고, 독일 막스플랑크 연구소에서는 2018년 압저항 센서를 이용하여 압력이 감지되면 이오닉 케이블과 시냅틱 트랜지스터가 촉각 뉴런을 모방하는 디바이스 구조를 이용하여 바이너리 촉각 패턴을 인지하는 연구를 수행한 결과를 발표하였다[25].
싱가포르 국립대학 연구팀은 2020년 인텔의 로이히(Loihi) 뉴로모픽 칩을 사용해 인공 피부로 덮인 로봇의 손으로 점자를 인식하는 연구와 함께 촉각과 시각 센서를 활용해 로봇이 안정적으로 물체를 쥐는 데 중요한 회전 운동 식별 능력을 시험하였다. 연구팀은 포착된 감각 데이터를 GPU와 인텔 로이히 뉴로모픽 칩에 동시에 전송해 처리 능력을 비교하였는데, 로이히 칩이 GPU에 비해 감각 데이터를 21% 빠르게 처리하고 45배 낮은 전력을 사용하는 성능을 보이는 것을 확인하였다.
국내의 촉각 분야에서는 2021년 성균관대학교 및 서울대학교 연구팀이 정전용량식 압력센서, 차세대 비휘발성 저항 변화 메모리인 RRAM 그리고 양자점 발광 다이오드로 구성된 피부 변형 범위에서도 훈련 추론을 할 수 있는 인공신경망을 통해 다양한 패턴의 자극을 정확하게 인식하는 신축성 뉴로모픽 감각 시스템을 개발하였고[26], 2022년 KAIST, 고려대학교, 한양대학교 연구팀이 나노 입자 기반의 압전 및 압저항 복합 촉각 센서를 제작하고, 이를 실제 신경 패턴에 기반한 신호 변환 시스템과 연결하는 실제 신경 신호의 패턴 학습을 바탕으로 한 인간 모사형 감각 시스템을 구현하였다[27].
한편, 후각 분야에서 생체모사의 후각수용체에 관한 연구가 활발히 진행되고 있다. 특히 트랜지스터 구조의 가스센서는 다양한 물질의 도입과 용이한 신호 증폭 등의 장점으로 후각수용체 또는 뉴로모픽 후각 소자 연구에 응용되고 있다. 상하이 대학 연구팀은 InGdO 나노섬유 기반의 트랜지스터 소자를 제작하여 시냅스 가소성(Synaptic Plasticity) 기반의 학습 기능이 가능한 가스센서 시스템을 제작하였다. 시냅스 가소성은 뇌에서 뉴런 간의 연결이 강화되거나 약화되는 과정을 나타내며, 학습과 기억을 형성하는 핵심 역할을 한다. 나노섬유 기반의 트랜지스터 소자를 활용하여 시냅스의 학습과 기억 기능을 모사하고, 파블로프 조건반사 실험의 모사가 가능함을 보였다[28].
서울대학교 연구팀은 스파이크 뉴럴 네트워크(SNN: Spiking Neural Network)와 FET 구조의 In2O3 가스센서를 활용하여 빠르고 신뢰성 높은 유해가스 감지 인공후각시스템을 보고하였다. 12개 가스센서에 current-to-spike encoder를 적용하여 뉴런 내부에서 입력 신호의 누적 후 임계값 초과 시 발화하는 integrate & fire 기능을 모사하고, 하드웨어 기반의 SNN 인공후각시스템을 구현할 수 있다. 해당 시스템은 5% 에러율 고려 시 2.5초 빠른 감지가 가능하며, gated schottky diode를 활용한 비휘발성 메모리를 시냅스 소자로 활용하여 데이터 저장을 위한 메모리가 필요하지 않고, 작은 소모전력(~3μW) 구동이 가능하였다[29].
2023년 KIST 연구팀이 산화물 결정 구조의 멤리스터 소자를 이용하여 외부 기체가 산화성 또는 환원성을 가짐에 따라 후각 시냅스가 반응이 달라지는 것을 이용해 산소 공공의 개수를 미세하게 조절하여 소자의 전도도를 변환시켜 인공후각 시냅스를 모방한 소자 어레이를 제작하였고, 가스 누출 지점으로부터 거리에 따라 감응 특성이 달라지는 것을 통해 가스 누출의 특정 패턴을 감지하는 신경망 시뮬레이션을 통해서 최대 92.76%의 정확도를 확보하였다[30].
최근까지 진행되는 뉴로모픽 후각 센서 연구는 뉴런과 시냅스 구현 단계에 있다. 향후 다양한 전자 소자와의 복합을 통한 고성능 인공후각시스템 구현이 필요하고, 다양한 후각신경 경로의 모사 및 기타 감각과의 복합을 통한 좀 더 고차원적인 후각 인지 연구가 요구된다.
Ⅳ. 뉴로모픽 인지 기술
1. 뉴로모픽 인지
외부로부터 자극이 가해지면 감각수용체는 반응하고 물리적, 화학적 신호를 시각, 청각, 미각, 후각, 촉각 등의 신경 신호로 바꾸어 발생한다. 이 발화된 신호는 감지(Sensation)된 신호로 분별이나 판단의 영역인 인식이나 인지(Perception)의 단계로 발전하기 위해서는 신호를 처리하고 판단하는 기능과 유기적으로 결합되어야 한다. 이러한 인지 단계는 정보를 얻고 이해하는 과정으로 사고, 기억, 판단 및 문제해결이 포함되는 뇌의 더 높은 수준의 기능이다.
뉴로모픽 인지는 감각수용체를 모사하는 뉴로모픽 센서로부터 발생하는 신호, 즉 스파이크 발화 신호로부터 뉴런과 시냅스를 모사한 연산장치를 이용하여 외부의 정보를 판단하고, 이해하는 과정이다. 뉴로모픽 인지를 구현하기 위해서 뉴로모픽 센서로부터 발생하는 스파이크 신호를 입력으로 하고, 이를 이용하여 학습하는 인공지능 구조인 SNN을 활용하여 저전력의 정보처리를 하는 연구들이 발표되고 있다.
차세대 신경망으로 SNN은 생물학적 뇌기능을 모사하고, 뇌의 저전력 정보처리를 모사하는 이유로 획기적으로 제안되었다[31]. 한 가지 특징은 SNN의 적용 컴퓨팅에는 기존의 DNN에서 사용되는 것과 다른 학습 규칙이 필요하다. Hebbian rule에 기초한 STDP가 대표적인 학습방법으로, SNN을 기반으로 한 비지도 학습방법이 주목받고 있다[32].
2. DNN & SNN 한계
뉴로모픽 인지기술을 구현하기 위해 최신의 인공지능 기술이 활용되고 있으나 몇 가지 제약이 존재한다. DNN의 경우 대규모 가중치 및 행렬을 처리하므로 빠른 연산 및 대용량 메모리를 요구한다. 이로 인해 큰 모델을 훈련하고 실행하기 위해서는 고성능 하드웨어가 필요하며 전력 소모가 심하다는 단점이 있다. SNN의 경우, 훈련 및 최적화가 DNN보다 복잡하며 희소한 스파이크 활동을 기반으로 하기 때문에 DNN 대비 표현 및 분류 능력이 제한될 수 있다. 또한, 스파이크 이벤트 기반으로 동작하기 때문에 추가적인 하드웨어 리소스와 지원이 필요할 수 있으며 풍부한 알고리즘 및 개발 도구가 부족한 상황이다. 현재는 DNN과 SNN을 결합하는 연구도 진행 중이며 두 유형의 장점을 결합하여 더 효율적인 AI 모델을 개발할 수 있을 것으로 예상된다.
3. 뉴로모픽 프로세서
하드웨어 측면에서 이러한 문제를 보완하기 위한 일환으로 뉴로모픽 프로세서가 등장했다. 뉴로모픽 프로세서는 인간 뇌의 작동 원리를 모방하는 고성능/저전력 하드웨어의 한 종류이며, 주로 인공신경망과 관련된 작업을 수행하는 데 사용된다. 현재까지 다양한 뉴로모픽 프로세서가 개발되었거나 개발 중인 것으로 보고되었다. IBM의 TrueNorth는 뉴로모픽 프로세서의 선구자 중 하나로, 실제 신경 세포 네트워크의 모델링과 비슷한 방식으로 동작한다. 저전력 대비 높은 신경망 효율을 제공하여 에너지 효율적인 뉴럴 네트워크 응용에 적합하다. 인텔이 개발한 로이히는 스파이크 부호화 및 이벤트 기반 아키텍처로 제작되어, 높은 병렬 처리 능력을 제공하는 동시에 다양한 인공신경망 모델을 지원한다. SpiNNaker(Spiking Neural Network Architecture)는 실제 신경망 네트워크를 묘사하기 위한 대규모 병렬 프로세서 시스템으로써 뇌 연구 및 로봇 공학 분야에서 사용된다. BrainChip Akida는 이벤트 기반 인공신경망을 지원하며, 실시간 패턴 인식 및 이벤트 감지 어플리케이션에 유용하다. Nvidia Spiking Neural Networks는 CPU뿐만 아니라 GPU 리소스까지 함께 사용할 수 있는 SNN 프로세서 아키텍처를 개발하였다.
뉴로모픽 프로세서는 혁신적이고 미래지향적인 기술이지만 아직 몇 가지 단점이 존재한다. 특수한 하드웨어 아키텍처로 제작된 뉴로모픽 프로세서는 알고리즘 변경이 어렵기 때문에 몇몇 특정 어플리케이션을 제외하면, 전통적인 범용 프로세서 대비 응용 범위가 제한적이며 최적화 및 튜닝이 어려울 수 있다. 몇몇 특정 작업에 대한 정확성 측면에서도 더 많은 연구와 개발이 필요할 수 있으며 뉴로모픽 프로세서용 소프트웨어 툴, 프레임워크, 라이브러리 등의 생태계가 협소하다는 단점도 존재한다.
4. 뉴로모픽 인지 기술 응용
대표적인 예로 맨체스터대학에서 발표한 SpiNNaker가 있다. 인간의 뇌 구조에서 영감을 얻어 8만 개 뉴런과 3억 개 시냅스를 가지는 프로세서로 2009년 완성된 기능을 가지는 칩 형태로 개발되었다. 취리히 신경정보학 연구소에서는 인공 실리콘 망막(뉴로모픽 센서)을 통해 발생하는 스파이크 신호를 단일 SpiNNaker 칩으로 모델링된 뉴런의 망막맵(뉴로모픽 프로세서)에 공급하여 저전력으로 시각정보를 처리하고, 모터의 운동 제어 신호 또한 시뮬레이션된 운동 뉴런의 발화 속도에 의해 획득하여 운동을 제어하므로 저전력의 뉴로모픽 감각, 운동 기능을 구현하였다[33].
뉴로모픽 인지 구현 예로, 금속 산화물 기반의 센서와 단일 트랜지스터 뉴런(1T-neuron)으로 구성된 단순한 구조를 가지는 후각 센서가 제시되었다[34]. 사람 뇌의 뉴런-시냅스 연결 시스템과 유사하게 스파이크 신호를 생성하고 이를 통해 기체 분자를 분류하는 구조로 뉴로모픽 모듈의 특징으로 인해 저전력구동과 신속한 인지가 가능한 장점이 있다. 하지만 인간의 후각수용체(Olfactory bulb)에서 발화되는 신호와는 차이가 있어, 후각수용체에 대한 신경 발화 모델이 도출된다면 보다 더 정밀한 후각 인지 기술이 구현될 것으로 전망된다.
알토대학 연구팀은 촉각 감지, 처리, 지각 학습 및 기억 능력을 모방하는 신경 시스템을 개발하였다[35]. 압력 센서가 촉각을 감지하고 이 신호가 광전달 시냅스를 통해 전기 신호로 변환된 후 최종적으로 SNN을 통해 분석된다. 빠른 응답 속도와 높은 감도를 특징으로 하는 광섬유를 이용하여 생물학적 신경계를 모방하였고 촉각 정보를 스파이크 시계열 패턴으로 전달할 수 있는 촉각 인지 기술을 제시하였다.
Ⅴ. 기술 발전 전망
생물학적 뉴런과 시냅스의 기능을 완벽히 구현하는 것은 아직도 한계가 많지만, 감각신경경로들을 더 세밀하게 연구하고, 생물학적 신경 전달과 인지 및 인식 알고리즘을 구현하기 위한 다양한 반도체 소자 및 프로세서의 연구는 앞으로도 지속해서 이루어질 전망이다.
감각신경에서부터 신호처리를 하는 인지 부분까지 구현되는 뉴로모픽 감각 인지 기술은 신경 과학, 로봇공학, 인공지능 및 의학 분야 등에서 다양하게 활용될 것으로 전망된다.
뉴로모픽 감각 기술은 가상현실(VR: Virtual Reality) 및 증강현실(AR: Augmented Reality) 환경에서 현실적인 감각 경험을 제공하는 데 사용될 수 있다. 사용자가 가상 세계에서 시각, 터치, 냄새, 열감 등의 감각을 모방하고 향상시켜 물체를 더 잘 인식하고 상호작용할 수 있도록 도움을 줄 수 있다. 특히 촉각 신경 신호의 정확한 디코딩 기술에 기반한 촉각 신호의 전기 자극 인코딩 기술은 기존에 사용되던 기계적 액추에이터의 높은 전력 필요성, 소형화 어려움, 실감 촉각 신호 재생의 어려움 등의 한계를 극복하고 낮은 전력으로 인간의 촉각 메커니즘을 모방한 가상촉각 구현이 가능하여 가상공간에서 더욱더 현실감 있는 촉감 전달 기술로 발전할 전망이다.
로봇 분야에서의 뉴로모픽 감각 인지 기술 발전은 오감 및 감각 기능이 우수하며 정교한 로봇 시스템을 개발하는 데 큰 영향을 미칠 것으로 기대된다. 뉴로모픽 감각 인지 기술을 로봇에 통합함으로써 의료, 제조 및 자동화, 환경 탐사 및 구조물 점검, 군사 등의 다양한 분야에서 인간과 로봇 간의 상호작용이 더욱 효과적으로 개선될 것이다.
의료 분야에 있어서는 신경학적 질환 또는 신체 장애를 가진 환자를 위한 치료 및 재활에 사용될 수 있다. 뇌-기계 인터페이스(BMI: Brain-Machine Interface)와 생체 부품에서 뉴로모픽 감각을 구현함으로써 저시력 또는 사지 장애를 가진 환자에게 감각을 되찾는 기회를 제공할 수 있다. 아울러, 뉴로모픽 감각 인지 기술을 기반으로 하는 초실감의 가상 촉감이 구현된 바이오닉스 기술은 기존의 의수와 의족 및 인공 피부 시장에 적용될 수 있으며, 기존 의료용 재활 시장까지 확대될 수 있고, 수술용 원격 로봇 산업에 적용되어 의사는 환자의 생체 조직의 질감을 더욱 생동감 있게 실시간 느낄 수 있으며, 정교한 조작을 통해 사고율을 줄이고 현장의 수술과 같은 촉감을 제공할 수 있다.
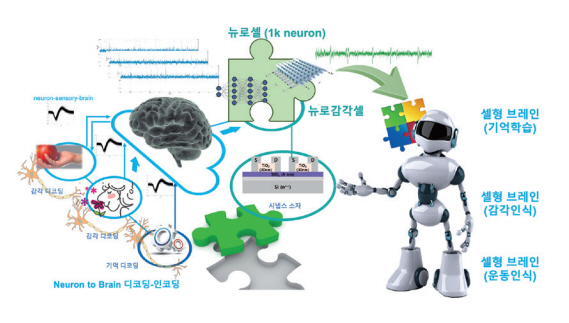
ETRI에서는 신경경로를 기반으로 촉각, 후각의 감각기관이나 대뇌 피질과 해마와 같은 신경신호 처리 기관들에 대한 뉴로모픽 디코딩, 인코딩 기술을 연구하고 있으며, 이러한 디코딩, 인코딩 기능을 1k unit 규모의 뉴런과 시냅스 소자를 이용하여 소형 단위의 뉴로 인지 셀 구조를 제안하여 연구를 수행하고 있다. 각각의 감각기능, 운동기능 및 기억기능 등을 단위 셀로 구현하여, 가상공간의 가상현실, 의료분야의 의수 및 보철기술 및 로봇 분야로의 응용을 기대하고 있다. 나아가, 이러한 단위 셀 구조에 대한 연계를 통해서 단위 뉴로 인지 셀들의 조합인 셀형 브레인을 구현할 것을 기대하고 있다(그림 4).
Ⅵ. 결론
본고를 통해서 뉴로모픽 감각 인지에 대한 기술 동향을 살펴보았다. 여러 가지 감각 중 촉각과 후각을 중심으로 감각신경경로를 기반으로 하는 감각신경 디코딩 기술, 생물학적 뉴런과 시냅스를 모사한 뉴로모픽 시냅스 소자 및 뉴로모픽 프로세서의 최근 연구 동향을 살펴보았다.
뉴로모픽 감각 소자와 뉴로모픽 시냅스 소자를 통합한 뉴로모픽 감각 인지 및 인공 감각 메모리 소자들이 활발히 연구되고 있으나, 단순 감지를 넘어 인지기능까지 구현하기 위한 SNN 학습법 등 앞으로 해결해야 할 연구과제도 산재해 있음을 확인할 수 있었다.
가상현실, 의료복지, 신경과학 및 뇌신경 인터페이스 등 앞으로의 활용 분야를 고려해 볼 때 뉴로모픽 감각 인지 기술은 조합형 뉴로 인지 셀 기술을 포함하여 새로운 기술들을 기반으로 활발한 연구가 수행될 것으로 전망된다.
용어해설
Dorsal Colunm 감각정보가 타고 올라가는 척수의 뒤쪽 기둥을 의미함
Dorsal Colunm Nuclei 뇌간의 등쪽 기둥에 있는 한 쌍의 핵으로서 감각정보가 연수를 통해서 시상(Thalamus)으로 연결되는 통로
Dorsal Root Ganglion 척수신경들의 신경절로서 감각신경세포의 신경세포체가 위치함
Dynamic Range 시냅스 소자의 학습 상태에서의 전도도의 비율을 의미함
LIF leaky-integrate-fire 모델로 자극에 대하여 누적되면서 전압이 상승하다가 하강을 반복하다가 특정 임계값 이상에서 발화하는 모델
MIM 금속-절연체-금속(Metal-Insulator-Metal)으로 구성된 2단자 소자
DNN 입력층(Input Layer)과 출력층(Output Layer) 사이에 여러 개의 은닉층(Hidden Layer)들로 이뤄진 인공신경망(ANN: Artificial Neural Network)
SNN spiking neural network로 뇌의 신경 경로 동작을 모방하기 위한 인공신경망의 유형
Somatosensory 체성 감각 기관으로서 촉각, 온도, 고유감각, 통각 등의 감각을 받아들이는 다양한 수용체로 구성된 감각 기관
약어 정리
A.J. Emanuel et al., "Cortical responses to touch reflect subcortical integration of LTMR signals," Nature, vol. 600, no. 7890, 2021, pp. 680-685.
J. Turecek et al., "The encoding of touch by somatotopically aligned dorsal column subdivisions," Nature, vol. 612, no. 7939, 2022, pp. 310-315.
J.D. Lieber et al., "High-dimensional representation of texture in somatosensory cortex of primates," PNAS, vol. 116, no. 8, 2019, pp. 3268-3277.
E.M. Izhikevich, "Simple model of spiking neurons," IEEE Trans. Neural. Netw., vol. 14, no. 6, 2003, pp. 1569-1572.
J. Kim et al., "Modeling long-term spike frequency adaptation in sa-i afferent neurons using an izhikevich-based biological neuron model," Exp. Neurobiol., vol. 32, no. 3, 2023, pp. 157-169.
Y. Kang et al., "A decoding model of spike firing in the slowly-adapting receptors for encoding the natural tactility," in Proc. Neuroscience 2022, (San Diego, CA, USA), Nov. 2022.
L. Buck et al., "A novel multigene family may encode odorant receptors: A molecular basis for odor recognition," Cell, vol. 65, no. 1, 1991, pp. 175-187.
K. Kaeppler et al., "Odor classification: A review of factors influencing perception-based odor arrangements," Chemical Senses, vol. 38, no. 3, 2013, pp. 189-209.
F. Kermen et al., "Molecular complexity determines the number of olfactory notes and the pleasantness of smells," Sci. Rep., vol. 1, 2011.
B. Malnic et al., "Combinatorial receptor codes for odor," Cell, vol. 96, no. 5, 1999, pp. 713-723.
O. Baud et al., "The mouse eugenol odorant receptor: structural and functional plasticity of a broadly tuned odorant binding pocket," Biochemistry, vol. 50, no. 5, 2011, pp. 843-853.
S.M. Boyle et al., "Expanding the olfactory code by in silico decoding of odor-receptor chemical space," eLife, vol. 2, 2013.
H. Jiang et al., "Theta oscillations rapidly convey odor-specific content in human piriform cortex," Neuron, vol. 94, no. 1, 2017, pp. 207-219.
P. Fan et al., "PtNPs/PEDOT:PSS-modified microelectrode arrays reveal electrophysiological activities of different neurons in medial amygdala of mice under innate fear," Front. Neurosci., vol. 16, 2022.
J. Kim et al., "A bird’s-eye view of brain activity in socially interacting mice through mobile edge computing(MEC)," Sci. Adv., vol. 6, no. 49, 2020.
J.-K. han et al., "A review of artificial spiking neuron devices for neural processing and sensing," Adv. Funct. Mater., vol. 32, no. 33, 2022.
S. Dai et al., "Recent advances in transistor-based artificial synapses," Adv. Funct. Mater., vol. 29, no. 42, 2019.
J.W. Lim et al., "Photo-synaptic oxide transistors with Al 2 O 3 /SiOX stacked gate dielectric exhibiting 1024 conduction states with good linearity," Adv. Electron. Mater., vol. 8, no. 10, 2022.
H. Lee et al., "Three-terminal ovonic threshold switch (3T-OTS) with tunable threshold voltage for versatile artificial sensory neurons," Nano Lett., vol. 22, no. 2, 2022, pp. 733-739.
M.-K. Kim et al., "Emerging materials for neuromorphic devices and systems," iSciences, vol. 23, no. 12, 2020.
S.H. Sung et al., "Simultaneous emulation of synaptic and intrinsic plasticity using a memristive synapse," Nat. Commun., vol. 13, no. 1, 2022.
S.H. Kim et al., "A bioinspired stretchable sensory-neuromorphic system," Adv. Mater., vol. 33, no. 44, 2021.
S. Chun et al., "An artificial neural tactile sensing system," Nat. Electron., vol. 4, no. 6, 2021, pp. 429-438.
J. Li et al., "Oxygen-vacancy-induced synaptic plasticity in an electrospun InGdO nanofiber transistor for a gas sensory system with a learning function," ACS Appl. Mater. Interfaces, vol. 14, no. 6, 2022, pp. 8587-8597.
D. Kwon et al., "Efficient fusion of spiking neural networks and FET-type gas sensors for a fast and reliable artificial olfactory system," Sens. Actuators B: Chem., vol. 345, 2021.
S.Y. Chun et al., "An Artificial Olfactory System Based on a Chemi-Memristive Device(Adv. Mater. 35/2023)," Adv. Mater., vol. 35, no. 35, 2023.
W. Maass, "Networks of spiking neurons: The third generation of neural network models," Neural Netw., vol. 10, no. 9, 1997, pp. 1659-1671.
P.U. Diehl et al., "Unsupervised learning of digit recognition using spike-timing-dependent plasticity," Front. Comput. Neurosci., vol. 9, 2015.
J.-K. Han et al., "Artificial olfactory neuron for an insensor neuromorphic nose," Adv. Sci., vol. 9, no. 18, 2022.
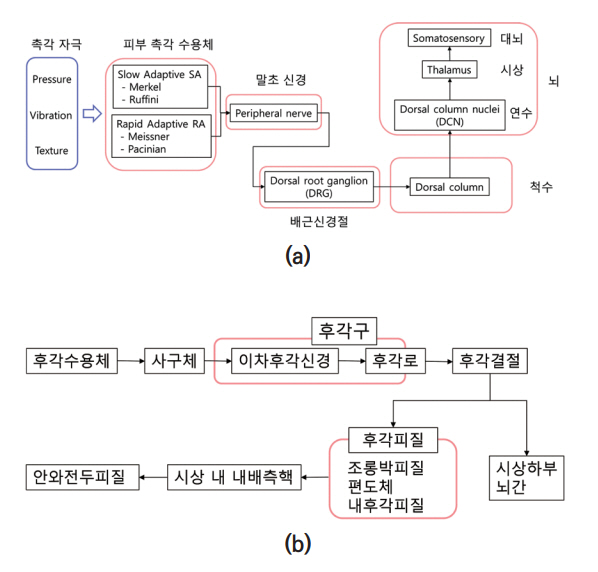
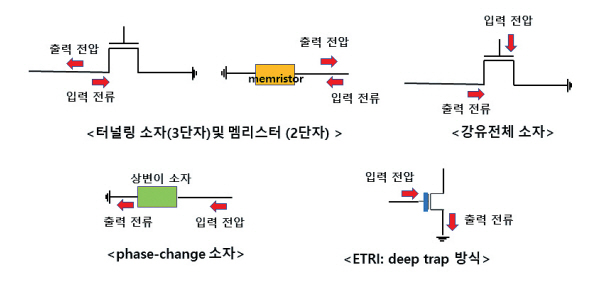

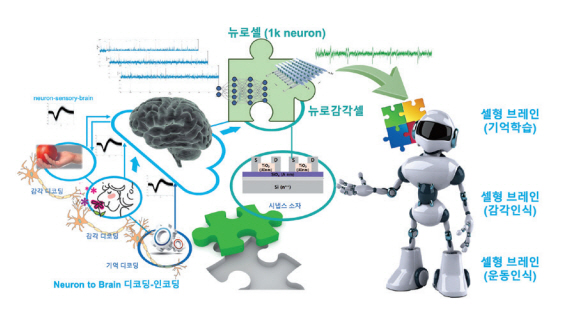
표 1 다양한 인공 시냅스 소자의 구조와 특성 요약
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.