김기덕 (Kim K.D.)
정형석 (Chung H.S.)
최정단 (Choi J.D.)
김세한 (Kim S.H.)
Ⅰ. 서론
최근 세계적으로 ‘휴머노이드(Humanoid) 로봇’ (이하, 휴머노이드)에 관심이 폭증하고 있는데, 그 배경에는 출산율 저하 및 노령화에 따른 노동인구 감소의 문제가 있다. 통계청에 따르면 2023년 전 세계의 여성 1인당 합계출산율(TFR: Total Fertility Rate)은 2.25명이다[1]. 특히 한국의 2023년 TFR은 0.7명으로 OECD 회원국 중 최하위를 기록했다[2]. 이는 곧바로 노동인구 감소로 이어지고 있다(그림 1 참고).

이와 같은 노동인구 감소는 경제와 사회 전반에 걸쳐 광범위한 영향을 미치며, 장기적으로 사회의 지속가능성을 위협하고 있다. 이에 과학기술 분야에서는 휴머노이드를 노동력 부족 문제의 필수 대안으로 주목하고 있다. 휴먼스케일의 휴머노이드는 인간의 생활 및 작업 환경 변화 없이도 인간의 일을 직접적으로 대신할 수 있어 노동력 부족 문제의 효과적인 해결책이 될 것으로 예상하기 때문이다.
이를 반영하듯 최근에 미국과 중국을 필두로 전 세계가 휴머노이드 개발 경쟁에 뛰어들고 있다. 이에 본고에서는 휴머노이드의 정의와 진화 과정을 기술 발전의 관점에서 조망하고, 진정한 지능형 휴머노이드를 구현하기 위한 미래 과제를 논의하고자 한다.
Ⅱ. 휴머노이드 로봇의 발전 과정
1. 휴머노이드의 언어적 의미
‘휴머노이드(Humanoid)’는 사전적으로는 생물학적으로 인간과 유사한 형태를 지닌 인간이 아닌 생물 또는 존재를 일컫는데, ‘인간의’라는 뜻의 라틴어 형용사 humanus(영어 단어 human의 어원)와 ‘형상, 모양’을 의미하는 고대 그리스어 eidos(영어 접미사-oid의 어원)가 결합해 만들어진 단어이다[3]. 용어의 사용은 훨씬 더 오래되었지만, 20세기 초에 이르러 오늘날 우리가 사용하는 인간을 닮은 로봇의 의미를 갖게 된 것으로 알려져 있다[4,5].
2. 휴머노이드 로봇의 정의와 분류
전통적으로 로봇공학(Robotics)에서 휴머노이드는 인간의 신체적 특징을 닮은 외형을 지니고 인간과 유사한 동작을 취할 수 있는 로봇을 지칭한다[4]. 최근에는 휴머노이드의 정의가 전통적인 로봇공학과 인공지능(AI) 기술이 결합하여 ‘인간의 외모를 넘어서 신체의 물리적 능력은 물론 지능을 갖추고 행동을 모방한 로봇’으로 확장 진화하고 있다.
휴머노이드만을 위한 별도의 명확한 분류 기준은 없다. 한국과학기술기획평가원(KISTEP)이 발간하는 보고서에서 휴머노이드를 이동방식과 인간형상 정도(로봇형상형, 인간형상형)에 따라 2족 보행형, 바퀴주행형, 감정소통형으로 분류하였다[6]. 그러나, 이 분류 방식은 로봇의 외형을 기준으로 하고 있어, 휴머노이드의 다양한 특성을 포괄하기에 한계가 있다. 대신에 기존의 사용처에 따른 로봇 분류의 하위에 로봇의 형태(휴머노이드 여부)에 따른 분류를 추가해 볼 수 있다. 로봇이 활용되는 영역 대부분에서 휴머노이드를 활용할 수 있을 것으로 기대되기 때문이다.
국제로봇연맹(IFR: International Federation of Robotics)은 최근 로봇의 발전 방향을 고려하여 로봇의 사용처에 따라 제조업용과 서비스용(개인서비스용, 전문서비스용) 로봇으로 분류하였다[7]. 로봇의 기계적 구조나 제어 방식 기반 분류의 한계를 보완하고자 사용처를 기준으로 새로운 분류를 제시한 것이다. 향후 거의 모든 분야에 휴머노이드가 활용될 것으로 예상되는 만큼 고정형, 바퀴형, 차륜형, 2족 보행과 같은 보행방식이나 인간 유사성 등은 실제 구체적인 활용 분야 따라 달라질 것이다.
3. 휴머노이드 로봇의 발전 과정(그림 2 참고)

가. 개념 태동기
1970년대부터 1990년대까지 일본의 대학과 기업이 주도한 휴머노이드의 초기 발전기를 ‘개념 태동기’라 지칭할 수 있다. 세계 최초의 전신 휴머노이드는 1973년 일본 와세다대학교가 개발한 ‘WABOT-1’으로 알려져 있다[8]. 이것은 사지 제어, 시각, 대화 시스템으로 구성되어, 일본어로 사람과 소통하고 외부 수용체, 인공 귀와 눈, 인공 입을 사용하여 물체까지의 거리와 방향 측정이 가능하다[9]. 비슷한 시기에 일본의 자동차 기업인 Honda는 두 다리뿐인 실험용 로봇 ‘E0’를 시작으로 꾸준히 E Series(1986~1993)를 연구하며 2족 보행 기술을 축적해 나갔다.
나. 보행 연구기
다음은 2000년대까지 이어진 ‘보행 연구기’로 이 시기에 휴머노이드의 2족 보행 기술에서 큰 진전을 이루었다. Honda는 1980년대 중반 시작한 2족 보행 연구를 바탕으로 P Series(1993~1997)까지 인간형 로봇 기술을 축적하였는데, 2000년에 ‘아시모(ASIMO)’를 출시하며 세계적으로 휴머노이드 연구에 큰 관심을 불러일으켰다[10]. 아시모는 키 120cm, 무게 52kg으로 걷기와 뛰기, 계단 오르기 등의 물리 능력과 동작을 이용한 감정표현이 가능했다. 이후, 2011년에 나온 신형 아시모는 물리 능력이 크게 향상되어 시속 9km로 뛰고 두 발 점프가 가능했다.
2004년에 KAIST의 오준호 교수 연구팀은 초기 아시모에 근접한 수준의 스펙을 보유한 대한민국 최초의 휴머노이드인 ‘휴보-1(KRH-3 HUBO1)’ 개발에 성공하며[10], 한국 로봇공학에 중요한 이정표를 남겼다. 이어서 2010년에는 더 가볍고 달리기가 가능한 ‘휴보-2(KRH-4 HUBO2)’를 선보였다. 이는 후에 재난 구조용 로봇 DRC-휴보로 이어졌다.
다. 인공지능 및 상호작용 강화기
2010년대 들어 인공지능 기술혁신의 속도가 빨라지며 휴머노이드 연구는 중요한 전환점을 맞이했다. 이 시기는 휴머노이드의 ‘인공지능 및 상호작용 강화기’로 로봇의 기계적, 물리적 기능 향상을 목적으로 초기 수준의 인공지능 기술이 적용되었다.
2013년 미국의 Boston Dynamics가 DRC(DARPA Robotics Challenge)의 일환으로 구조 로봇으로 설계한 ‘아틀라스(Atlas)’가 대표적이다[11]. 아틀라스는 유압 액추에이터를 채택하여 강한 힘과 민첩한 동작을 선보였다. 기존의 아틀라스를 대폭 업그레이드한 ‘아틀라스HD’는 이전 모델보다 작고 가벼우면서도 민첩한 동작이 가능해서 달리기, 점프, 백플립 등을 선보이며, 같은 시기의 다른 2족 보행 로봇과 비교하여 독보적인 운동 능력을 보유하여 휴머노이드 시장을 주도했다.
라. 자율성 및 인간 협력기
1950년대에 처음 등장한 인공지능은 두 차례의 ‘겨울’을 거쳐 현재는 세 번째 성장기에 있다. 휴머노이드는 바로 이 ‘제3차 인공지능 붐’과 결합하여 ‘자율성 및 인간 협력기’에 진입하며 새로운 도약 중이다[6,12]. 이 시기의 포문을 연 것은 미국의 전기 자동차 기업 Tesla가 2023년 공개한 ‘옵티머스 2세대(Optimus Gen2)’라고 할 수 있다. 옵티머스 2세대는 Tesla가 설계한 액추에이터와 센서를 탑재하여 정교한 움직임과 민첩성을 보이며, 로봇 손에는 11-DoF의 관절과 모든 손가락에 센서를 적용하여 달걀처럼 섬세한 물건을 손상 없이 다룰 수 있음을 보여주었다[13]. 이와 비슷한 시기에 미국의 Figure AI는 생성형 AI를 적용하여 인간과 자연스럽게 대화하며 행동하는 ‘피규어(Figure)01’을 공개하며 시장에 충격을 주었다[14].
대부분의 기존 휴머노이드는 인간과 유사한 신체 구조와 물리능력을 보여주는 데 초점이 있었다. 반면에 Tesla와 Figure AI가 선보인 휴머노이드는 이전 단계에 등장한 로봇과 확연한 차이점을 보인다. 안정적인 보행과 향상된 신체 능력을 바탕으로, 인공지능을 적용하여 인간과 자연스러운 상호작용 및 자율성을 강화하면서 휴머노이드의 새로운 가능성을 제시하고 있다. 이러한 붐을 증명하듯이 2025년 현재, 미국과 중국의 기업들이 새로운 휴머노이드를 경쟁적으로 공개하며, 연구 및 투자도 활발하다.
현 단계가 성숙하는 시기는 알기 어렵다. 다만 이 시기가 무르익는다면, 다음 단계는 휴머노이드의 ‘완전 자율 및 사회 융합기’가 될 것이다. 이때가 되면 SF영화에서 그리는 것처럼, 인간과 흡사한 외모를 갖고, 완전한 자율성에 기반하여 인간 사회에 융합되어 인간과 공존하는 휴머노이드가 등장할 수 있을 것이다.
Ⅲ. 휴머노이드 로봇 발전의 전환점
비교적 오랜 시간 동안 더디게 진행되던 휴머노이드의 발전 속도가 최근 들어 급격하게 빨라진 원인은 제조원가의 하락과 인공지능의 발전에서 찾아 볼 수 있다.
1. 로봇 제조원가 하락
로봇 제조원가의 가장 큰 비중을 차지하는 액추에이터의 구동 방식이 최근에 유압식에서 전동식으로 전환되면서 제조원가가 큰 폭으로 하락하였고[6], 다양한 로봇 모델이 앞다투어 등장하는 원동력이 되었다. Tesla를 필두로 여러 기업이 전동식 액추에이터를 채택하면서, 휴머노이드 제조 방식의 패러다임이 변화하고 있다.
실제로 Unitree가 2024년에 출시한 G1 기본 모델의 판매 시작가는 $16,000으로 책정되어 시장의 큰 관심을 모았다. 이를 반영하여 시장조사기관 Goldman Sachs는 휴머노이드 평균 가격이 2023년에 $150,000으로 1년 사이에 40% 하락했다고 보고했으며[15], Macquarie와 Global X는 휴머노이드 제조원가를 $40,000~50,000 사이로 추정하였다[16,17].
2. 로봇과 인공지능 기술혁신의 결합
2010년 중반부터 본격적으로 시작된 ‘제3차 인공지능 붐’이 휴머노이드와 결합하여 로봇의 세대를 구분할 수 있을 만큼 강한 변화를 일으키고 있다. 기존 산업용 로봇은 주로 정형화된 환경에서 특정 임무를 반복 수행하도록 프로그래밍하는 방식으로 설계되었다. 그러나 인공지능의 적용으로 로봇은 비정형 환경에서 스스로 학습하고 적응하며, 자율적으로 임무를 수행하는 방향으로 발전하고 있다. 인공지능이 본격 적용되기 전의 휴머노이드를 ‘1세대(레거시)’ 휴머노이드라고 한다면, 인공지능이 적용된 휴머노이드는 ‘2세대(지능형)’ 휴머노이드라고 할 수 있다.
머신러닝을 이용하여 로봇의 물리 능력이 비약적으로 발전하면서 레거시 휴머노이드가 지능형으로 진화하기 시작하였다. 강화학습을 통해 로봇의 보행 능력 및 조작 능력 등이 향상되었고, LAM 기술로 로봇 스스로 인간 동작을 학습하여 실제적인 행동을 수행할 수 있게 되었다. 안정적인 물리 능력을 갖춘 로봇이 생성형 AI를 만나 인간과 자연스러운 상호작용을 선보이며, 앞으로 폭넓은 활용 가능성을 제시하고 있다.
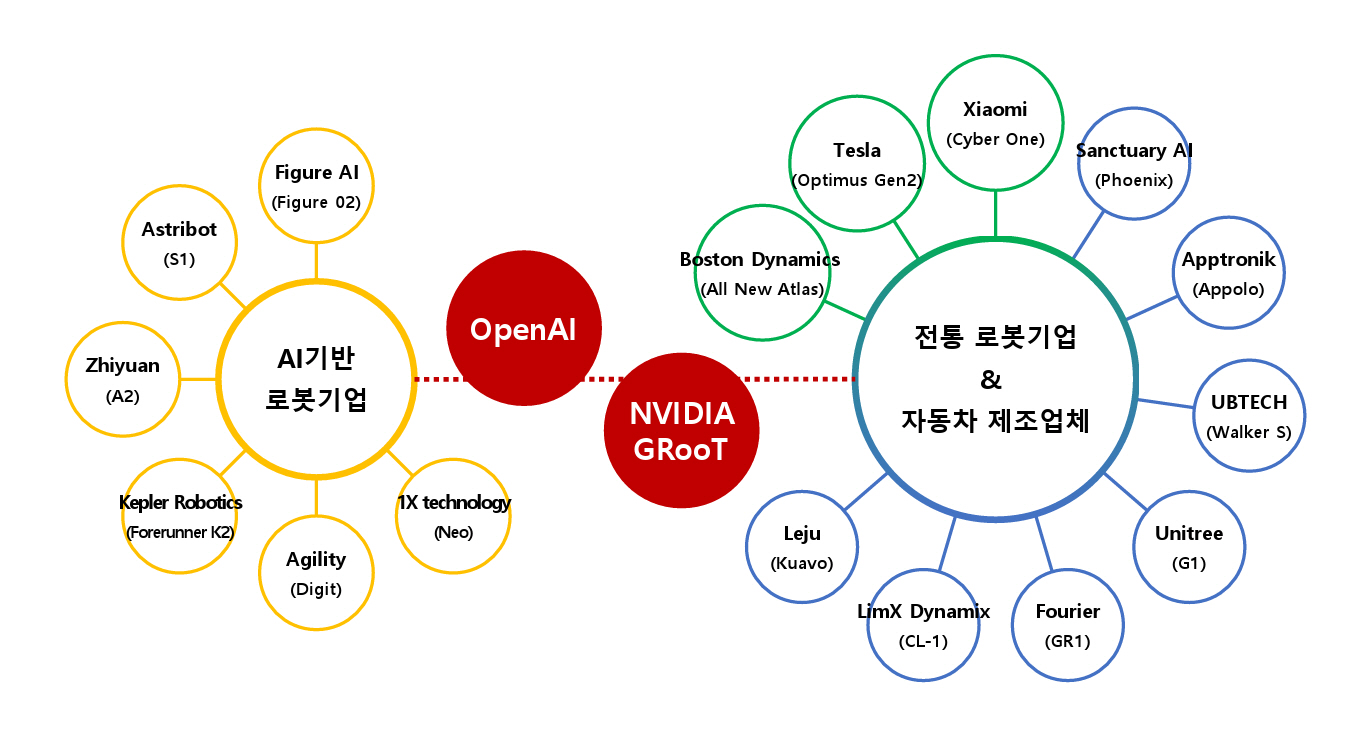
이러한 추세는 휴머노이드 하드웨어 플랫폼 개발사(기존 로봇 기업)와 인공지능 및 소프트웨어 기업 사이에 전략적 협업 및 투자를 촉진하고 있다. 자율주행기술에 강점을 지닌 자동차 제조업체가 휴머노이드 개발에 뛰어들면서 관련 업계의 기술 경쟁 심화로 이어지고 있다. 직접 지능형 휴머노이드 개발을 진행 중인 기업은 전통 로봇기업, 자동차 제조업체, AI 기반 로봇기업으로 크게 세 부류이고, 여기에 OpenAI와 NVIDIA 등 인공지능 플랫폼을 제공하는 구도로 그림 3과 같다.

Ⅳ. 휴머노이드 로봇 국내 현황
1. 지능형 로봇 산업 현황
한국로봇산업협회가 실시한 로봇산업 실태조사에 따르면, 표 1에 보이는 것과 같이 로봇산업은 중소기업(98.3%)이 주축이 되어, 로봇부품 및 소프트웨어를 주업종(58.5%)으로 한다. 전체 로봇 매출 5조 9,805억 원에서 제조업용 로봇의 매출이 2조 9,903억 원(50%), 로봇부품 및 소프트웨어 매출이 1조 9,446억 원(32.9%)으로 서비스용 로봇 매출은 상대적으로 매우 낮은 수준이다[18].
표 1 국내 로봇산업 분야별 사업체 규모
| 구분 | 대기업 | 중견 기업 | 중소 기업 | 합계 | |
|---|---|---|---|---|---|
| 제조업용 로봇 | 6 | 12 | 549 | 567 | |
| 서비스용 로봇 | 전문서비스 | 2 | 8 | 364 | 374 |
| 개인서비스 | 2 | 2 | 162 | 166 | |
| 로봇부품 및 소프트웨어 | 2 | 11 | 1,404 | 1,417 | |
| 총계 | 12 | 33 | 2,479 | 2,524 | |
이 결과는 전체 로봇산업에 대해 로봇의 사용처를 기준으로 조사했기 때문에, 휴머노이드 관련 산업 현황을 정확히 파악하기는 어렵다. 그럼에도 제조업용 로봇과 로봇부품 및 소프트웨어 분야를 중심으로 소규모 영세 업체 위주의 기업 분포는 아직 국내 휴머노이드 산업 생태계가 충분히 형성되지 않았음을 보여준다.
실제로 국내에 휴머노이드를 개발하는 기업은 매우 소수로 알려져 있다. KAIST의 휴보 연구진이 2011년에 창업한 레인보우로보틱스는 2족 보행 로봇보다는 바퀴형 휴머노이드 개발에 집중하는 모습이다. 네이버랩스는 로봇 팔과 손에 집중하여 고정형 상반신 휴머노이드를 개발하고 있다. 현재 국내에서 유일하게 2족 보행 휴머노이드를 개발하고 있는 기업은 에이로봇(AeiRobot)이다. 에이로봇은 한양대학교 한재권 교수 연구실의 스핀오프 기업으로 성장 초기 단계에 있지만, 지난 ‘2024 로보월드’에서 리니어 액추에이터를 적용한 앨리스(ALICE)4를 공개하며 국내 휴머노이드 연구를 선도하고 있다.
2. 휴머노이드 관련 정책
한국에서 휴머노이드에 대한 정책적 관심은 최근에야 재점화되었다. 「지능형 로봇 개발 및 보급촉진법」(2008. 9.)을 근거로 ‘제4차 지능형 로봇 기본계획’이 시행 중이나, 2023년 정부의 로봇 분야 R&D 총액 1,329억 원 중에 산업부와 과학기술정보통신부의 휴머노이드 직접 예산은 0원이라고 지적되었다[19]. 「국가전략기술 임무중심 전략로드맵」(2024. 2.)의 필수 기반 분야에도 제조로봇 중심의 첨단로봇이 포함되어 있을 뿐 휴머노이드를 구체적으로 명시하지는 않았다. 그러나 ‘3대 게임체인저 기술 이니셔티브’(2024. 4.)에 휴머노이드 관련 요소 기술(온디바이스 AI반도체‧모듈, 초정밀 의료용 로봇, 로봇기술 융합 웨어러블 디바이스, 퀀텀AI 활용 자율주행‧AI로봇 등)이 다수 포함되어 있었고, 산업통상자원부는 휴머노이드를 국가첨단전략산업으로 신규지정(2024. 12.)하는 등 휴머노이드에 대한 정책적 관심이 살아나고 있다.
3. 휴머노이드 관련 기술 현황
앞에서 살펴본 바와 같이, 한때 한국은 일본과 경쟁할 만한 수준의 휴머노이드 기술을 보유했던 것으로 평가된다. 그러나 현재는 기술적으로 우리나라와 선진국과 사이에 격차가 크게 벌어진 상황이다. 휴머노이드를 구성하는 양대 기술 축인 인공지능과 첨단로봇‧제조의 기술 수준을 근거로, 지능형 휴머노이드 분야에서 한국과 선도국 사이의 격차는 3년 내외로 추정된다. 한국과학기술기획평가원(KISTEP)의 「2022 기술수준 평가」에 따르면 인공지능은 선도국(미국) 대비 70~85% 수준(1.8~3년 격차)이고, 첨단로봇‧제조는 선도국(미국) 대비 80~85% 수준(2~2.5년 격차)으로 평가되었다[20].
실제로 현재는 대학 연구실의 소규모 연구와 앞에서 언급한 소수 기업에서 휴머노이드 개발 명맥을 유지하는 실정이다. 다행인 것은 대학 연구실의 휴머노이드 기술 수준은 비교적 높은 것으로 보인다. 한양대학교 한재권 교수가 이끄는 HERoEHS팀은 로봇 축구 대회인 RoboCup Humanoid Adult Size League에서 2022~2023년 연이어 준우승을 차지하였고, 2024년에는 3위에 올랐다. 서울대학교 박재홍 교수 연구실인 DYROS(Dynamic Robotic Systems) Lab도 CES 2022에서 재난 구조용 아바타 로봇 ‘토카비(TOCABI)’를 공개하여 주목받았다.
Ⅴ. 휴머노이드 시대를 맞이하기 위한 과제
1. 왜 휴머노이드여야 하는가?
휴머노이드 연구는 종종 “휴머노이드가 왜 필요한가? 꼭 필요한가? 그냥 로봇으로도 충분하지 않나?”라는 질문을 받는다. DRC는 이러한 질문에 휴머노이드의 당위성을 증명하는 계기가 되었다.
2011년 3월, 동일본 대지진으로 인한 쓰나미가 일본 후쿠시마 제1 원자력 발전소를 덮치는 사고가 일어났을 당시에, 일본 정부는 방사능물질이 다량 방출된 사고 현장에 로봇을 투입하여 정확한 사태 파악 및 사고 수습을 시도하였다. 그러나 당시에 사람을 대신해 투입된 로봇들은 모두 임무 수행에 실패했다[21]. 이를 지켜본 미국의 방위고등연구계획국(DARPA)은 인간이 설계한 공간에서 인간이 일반적으로 사용하는 도구와 장비를 사용하여, 위험하고 열악한 환경에서 복잡한 작업을 수행할 수 있는 로봇의 개발을 촉진하는 것을 목표로 재난 로봇 구조 대회(DRC)를 기획했다.
DRC는 2013년부터 2015년까지 세 개의 대회로 구성되었고, 결승전에는 총 23개 팀이 출전하였는데, 한국의 오준호 교수가 이끈 TEAM KAIST의 DRC-휴보가 최종 우승하였다[22]. 당시 출전한 로봇들은 대회에서 제시한 임무 수행에 적합하도록 다양한 방식의 변형이 있었지만, 23종의 로봇 중에서 19종이 2족 보행 휴머노이드의 외형을 하고 있었고, 나머지 로봇 중 다수는 인간형 상반신에 4족 보행방식을 채택하였다[22]. 이는 재난 환경에서 원활한 임무 수행에는 휴머노이드가 가장 적합한 형태라는 것을 보여준다.
DRC의 목표를 통해서 알 수 있듯이, 로봇이 인간과 공존하기 위한 전제조건은 형태적으로 휴먼스케일의 2족 보행 휴머노이드이다. 만약에 로봇과 인간의 공존을 위해서 인간의 생활 및 작업 공간을 로봇 중심으로 변경해야 한다면, 그동안 인간이 구축해 온 경제‧사회‧문화가 모두 바뀌어야 한다는 의미가 될 것이다.
2. 휴머노이드의 기술적 과제
가. 글로벌 기업의 휴머노이드 기술 수준
최근 등장한 휴머노이드는 사람들이 기대하는 수준에 도달했다고 볼 수 있을까? 로봇의 성능지표 공개 범위와 방식이 제각각이고, 영상 외에 세부 사항을 공개하지 않아 정확한 판단은 불가능하지만, 2024년까지 공개된 휴머노이드는 진정한 의미의 지능형 휴머노이드라고 보기는 어려운 수준이다. 대표적으로 Unitree의 G1과 Booster Robotics의 T1 등은 비교적 안정적인 보행 위주의 물리 능력을 보여주지만, 지능형 휴머노이드라고 판단할 수 있는 성능은 확인되지 않는다. 다만, Tesla의 옵티머스 2세대와 Figure AI의 피규어01 정도가 간단한 대화를 통한 추론과 실행을 보여, 초보 단계의 2세대(지능형) 휴머노이드라고 볼 수 있다.
이런 점은 언론 보도를 통해서 지적되고 있으며, 전시회에 등장한 휴머노이드를 통해서도 알 수 있다. 지난 2024년 8월 베이징에서 열린 ‘WRC 2024’ 행사에는 중국의 여러 기업이 휴머노이드를 선보여 주목받았다. 하지만 대부분의 휴머노이드는 크레인이나 거치대에 의지하거나 전시용 투명상자 속에서 보호받고 있었고, 현장에서 실제 구동 시연하는 기업은 소수에 불과했다. 유명 기술 잡지 MIT Technology Review는 이러한 현실을 비판하며 기업들이 공개한 휴머노이드 영상의 과장 가능성을 경고하였다[23]. 실제로 2024년 10월 Tesla의 로보택시 행사장에 배치된 옵티머스 2세대는 일정 부분 원격제어로 작동하였다는 점을 Tesla가 공식 인정하기도 했다. 곧이어 11월에 열린 ‘Humanoids 2024’에서도 로봇들이 모두 원격제어로 작동되고 있었다. 따라서 현재까지 공개된 모델들은 1세대 휴머노이드를 크게 벗어나지 않는다고 볼 수 있다.
나. 휴머노이드 상용화를 위한 해결 과제
휴머노이드의 발전 속도가 빨라지고 시장도 급격히 커지고 있기는 하지만, 인간과 동일한 환경에서 인간이 사용하는 도구로 인간과 동일한 방식으로 임무 수행이 가능하기까지 넘어야 할 과제가 많다.
1) 인간을 닮은 물리 능력
현재 대부분의 휴머노이드는 여러 가지 부분에서 여전히 인간 수준의 물리적 운동 능력 구현에 한계를 보인다. 특히 인간형 로봇의 가장 기본적인 요소인 2족 보행에서 일부 휴머노이드가 탁월한 수행을 보이고 있지만, 여전히 다양한 조건에서 안정적인 보행은 요원하다. 지형에 구애받지 않고 안정적인 걷기와 뛰기, 보행 중 민첩한 방향 전환, 예상치 못한 외부 충격 발생 시 자세제어도 가능해야 한다. 이를 해결하기 위한 주요 과제는 △다양한 지형에서 동적 균형 유지 및 안정적 움직임 제어, △에너지 효율적인 보행 알고리즘, △액추에이터, 센서, 제어 알고리즘의 정확한 실시간 동기화로 민첩성 구현 등이다.
다음으로 휴머노이드에 요구되는 물리 능력은 인간이 사용하는 도구를 사용하기 위한 조작 능력이다. 휴머노이드의 손이 인간의 손과 같은 정확하고 민첩한 조작 능력을 갖추는 것은 물론이고, 그 크기도 인간의 신체와 유사해야 인간의 도구를 무리 없이 사용할 수 있다. 사람의 손은 5개의 손가락에 27-DoF를 갖는다고 알려져 있다. 그러나 현재 대부분의 휴머노이드에는 그리퍼 또는 3개 손가락을 가진 단순화된 형태의 손이 장착된 경우가 많고, 자유도는 10~20-DoF에 불과하다. 로봇 손을 구현하는데 자유도와 크기 사이에는 교환 관계가 있어, 사람 손의 크기로 자유도를 높이기 어렵기 때문이다. 따라서 작업 대상 물체의 모양과 크기에 제약이 없고, 인간이 사용하는 도구를 사용하여, 다양한 물체를 손상하지 않으면서 정확하고 섬세한 조작을 하기 위해서는 기본적으로 △사람 손과 유사한 크기로 △높은 자유도를 가진 로봇 손이 구현되어야 한다.
오늘날 전기자동차를 비롯하여 배터리로 구동되는 다양한 시스템은 에너지 효율성과 구동 시간의 문제를 안고 있다. 휴머노이드는 특히 에너지 집약적인 시스템으로 알려져 있는데, 현재 대부분의 휴머노이드는 구동 시간이 수 시간을 넘지 못한다. 이마저도 실제 작동 시간인지, 대기 시간인지 불명확하다. 따라서, △잦은 충전 없이도 작동 시간을 연장할 수 있는 효율적인 전력 시스템과 △1회 충전으로 충분한 작동 시간을 확보할 수 있는 고성능 배터리의 구현이 동반되어야 한다. 여기에 덧붙여 △대체 에너지원에 관한 연구도 필요할 것이다.
2) 인간을 이해하는 지적 능력
인간의 공간에서 작동하기에 적합한 신체 구조와 물리 능력을 갖춘 휴머노이드가 실제로 임무 수행을 하기 위해서는 인간의 환경을 이해하고 인간과 상호작용을 할 수 있어야 한다. 현재 여러 기업이 휴머노이드를 제조 현장에 활용하려는 시도가 보인다. 제조시설은 비교적 낮은 수준의 인식과 감지를 통한 주변 환경 이해만으로도 작업이 가능한, 정형화되고 규격화된 환경이다. 이에 반해 사람의 일상생활 공간은 공간의 규모, 평면의 구조, 사물의 종류와 배치 등으로 인해 무한대의 다양성이 상존한다. 따라서 다양한 센서와 시각 시스템을 통해 수집된 정보를 바탕으로 복잡하고 구조화되지 않은 주변 환경을 이해해야 인간과 일상생활을 함께할 수 있다. 이를 위한 주요 과제는 △실시간으로 감각 데이터의 인지‧처리‧반응, △다중 감각 입력(시각, 촉각 등)의 통합 및 해석이 있다.
인간-로봇 상호작용(HRI)은 궁극적으로 휴머노이드와 인간이 공존하기 위한 중요한 과제이다. 일차적으로 언어적 소통에 관한 부분은 이미 다양한 인공지능 서비스를 통해서 발전하고 있다. 그러나 인간의 상호작용에서 비언어적 의사소통이 차지하는 비율이 매우 높은데, 모호하고 복잡하여 인식과 해석이 어렵다. 따라서 휴머노이드가 표정, 몸짓, 신체 언어와 같은 인간의 다양한 신호를 인식하고 이에 반응하기 위해서는 높은 차원의 학제 간 연구가 요구된다. 인간의 환경을 이해하고 인간의 소통방식을 이해할 수 있을 때 비로소 로봇이 가진 물리 능력이 인간을 위해서 제대로 발휘될 수 있을 것이다.
3) 기타–경제적, 사회적‧윤리적, 법적 과제
인간과 휴머노이드와 공존하는 미래가 가능하기 위해서는 기술적 과제 외에도 경제적, 사회적‧윤리적, 규제 및 법적 과제 등을 극복해야 한다. 먼저 휴머노이드의 활용 확산을 위해서는 지금보다 훨씬 낮은 가격으로 공급을 확대하여 접근성을 높여야 한다. 휴머노이드의 복잡한 설계는 △표준화를 통해 기술 장벽을 낮추고, △모듈화를 통해 제조 공정을 단순화하여 대량 생산을 통해 낮은 생산 단가를 낮춰야 한다.
인간-로봇 관계에서 발생할 수 있는 윤리적 문제를 우려하는 낮은 사회적 수용성은 휴머노이드의 보편화에 큰 걸림돌이다. 인간의 외모뿐만 아니라 감정과 행동 모방은 인간성에 대한 도전이라 생각하여 발생하는 거부감이라 짐작된다. 사회적 수용성은 매우 다면적인 요소로 이것을 인공지능 및 휴머노이드 시스템에 어떻게 통합할 것인지 대비가 필요하다.
마지막으로 보안 및 법적 책임에 관한 정책적 대응이 요구된다. 인공지능을 활용하는 미래 기술들은 감시 및 프라이버시 문제를 내포하고 있다. 휴머노이드도 예외는 아니어서, 로봇의 카메라와 마이크를 통해 개인 정보가 무분별하게 수집 및 활용될 가능성을 대비하여, 데이터의 보호 및 보안에 대한 규제가 마련되어야 할 것이다. 휴머노이드가 연관된 사고의 법적 책임 소재를 명확히 할 수 있도록, 휴머노이드가 보편화된 시대를 대비하여 법‧제도를 사전에 정비하려는 노력이 수반되어야 한다.
Ⅵ. 결론
제3차 인공지능 붐과 공진화하며 전환기를 맞이한 휴머노이드 발전이 당분간은 급속히 진행될 것으로 보인다. 그러나 우리나라 로봇산업 구조와 기술 수준은 휴머노이드 시장의 성장을 제대로 대비하지 못하고 있다. 기존의 로봇산업은 소규모 영세 업체 중심의 기업 생태계를 형성하여 휴머노이드 시장은 초기 단계에 있고, 인공지능과 첨단로봇‧제조 분야도 선진국과 기술적으로 격차를 보인다.
저출산‧고령화 시대에 휴머노이드가 국가‧사회문제 해결을 위한 필수 대안의 하나라는 점은 분명하다. 초기 단계에 있는 국내 휴머노이드 산업의 성장과 국제 경쟁력 확보를 위해서는 독자적인 휴머노이드 모델 확보를 통한 선진국과의 기술격차를 해소하기 위한 노력이 요구된다.
참고문헌
그림 1
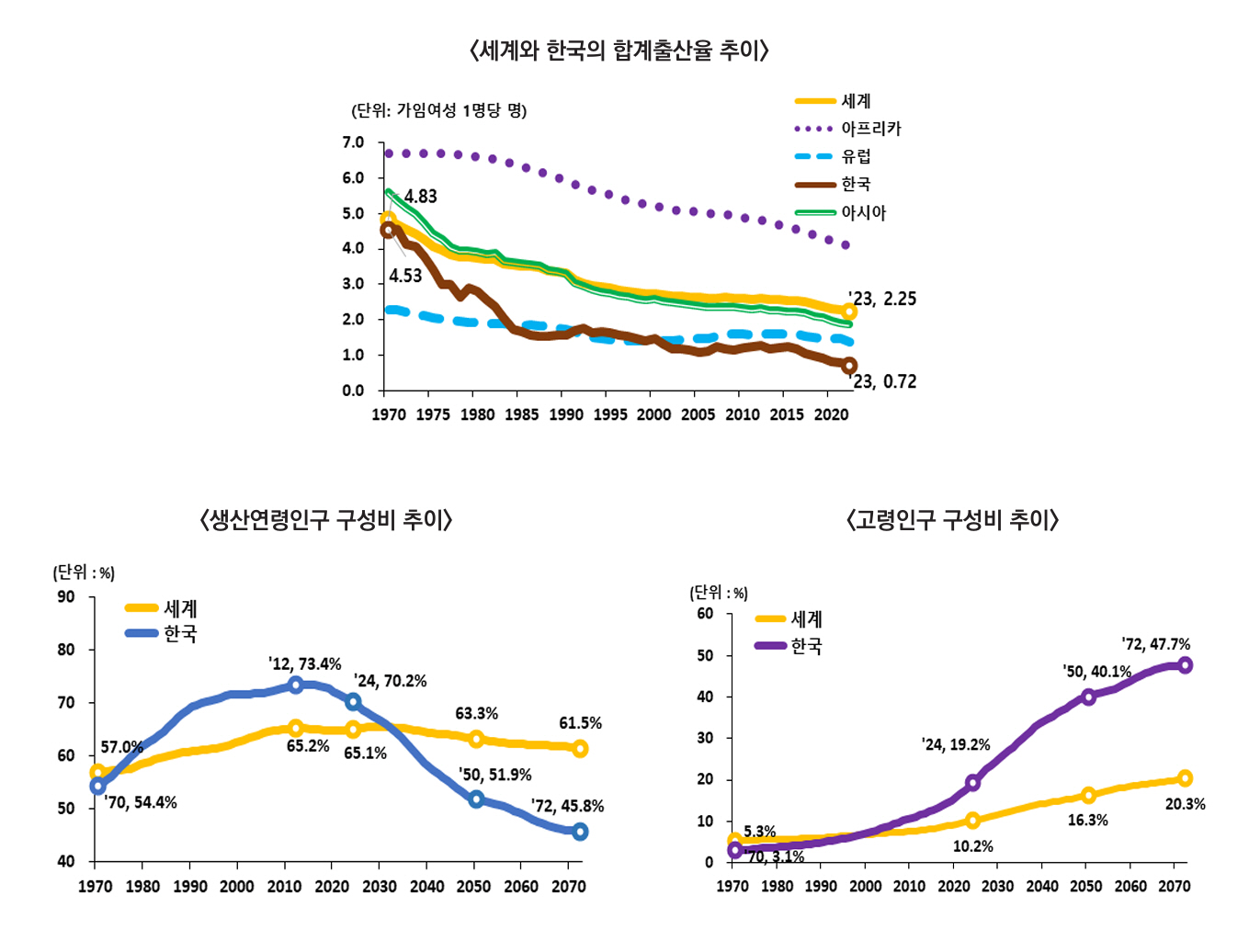
그림 2
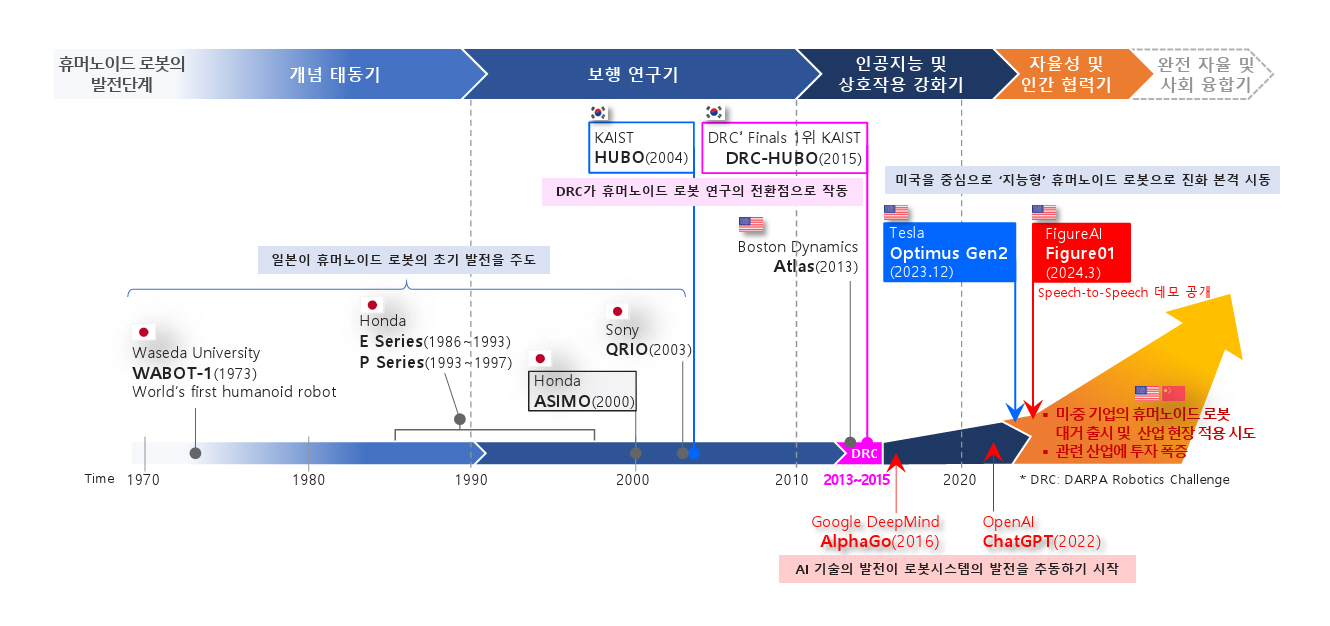
그림 3