주요 기업 범용 AI로봇 생태계 창출 전략 분석
Analyzing the Ecosystem Development Strategies of Leading Generalist AI Robot Firms
- 저자
-
차남준기술경제연구실 yoonseul@etri.re.kr
- 권호
- 40권 4호 (통권 215)
- 논문구분
- ICT 기반 미래사회 대응을 위한 기술·정책 동향
- 페이지
- 25-38
- 발행일자
- 2025.08.01
- DOI
- 10.22648/ETRI.2025.J.400403
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- The competition to dominate the emergent general-purpose robot market is intensifying, emphasizing the importance of strategic ecosystem management. Despite South Korean firms entering this market, they faces challenges owing to low competitiveness, high technological dependency, and unclear strategic direction. This study analyzes ecosystem strategies of major global players—Nvidia, Google, Agibot, Tesla, and Figure AI—in generalist AI robotics, classifying strategies by openness of ecosystem creation and use. We identify distinct approaches: Nvidia’s ‘opened-dependent’; Google’s ‘restricted-open’ model; Agibot’s ‘quasi-open’ approach aimed at rapidly establishing a competitive ecosystem; and the vertically integrated ‘closed’ strategies of Tesla and Figure AI. Findings suggest that companies align ecosystem strategies with core competencies. For South Korea to achieve competitiveness, it must clearly identify its strategic strengths and adapt to the shift toward AI- and data-driven robotics. This study offers a strategic framework for South Korea to navigate the global robotic landscape.
Share
I. 서론
일반적으로 첨단 기술 분야에서 초기 생태계를 선점하는 것은 매우 중요하며, 그 분야가 통합적이며 상호의존성이 강할수록 더욱 그러하다. 그 때문에 산업의 초기 생태계 경쟁에서 승리하고 지배권을 확립하기 위해 가장 효과적인 방법은 자유롭게 개방된 지배적 플랫폼 공급을 통해 많은 참여자를 유인하고 그들의 혁신역량을 활용하여 점진적으로 지배적 생태계로 확장하는 방식이다[1,2]. 그러나 이와 반대로 충분한 역량과 자본을 보유한 기업의 경우 독자적으로 구축한 생태계의 효율성과 품질을 앞세워 사용자를 확보함으로써 생태계를 선점하는 경우도 존재한다[3,4]. 과거 안드로이드와 애플 생태계를 이에 대한 대표적인 사례로 볼 수 있다.
하지만, 최근 첨단기술 분야에서는 개방형 생태계와 폐쇄형 생태계가 시장에 공존하는 경우가 대부분이다[5,6]. 기술의 복잡성이 높아짐에 따라 하나의 기업이 생태계의 모든 부분을 수직적-수평적으로 통합하는 것은 매우 어렵기 때문이다[7]. 이러한 경향은 AI기반의 로봇 분야에서 더욱 두드러진다. 로봇 기술은 여러 이종기술이 결합된 복합 기술체로써 로봇을 구성하는 다양한 이종 기술 간의 강력한 상호의존성이 존재하기 때문이다[8]. 특히, 로봇 파운데이션 모델의 등장은 로봇을 데이터와 AI의 영역으로 더 깊이 끌어들이게 되었다. 이와 같은 맥락에서 로봇 분야로 확장을 시도하는 전 세계 주요 AI 기업들은 자신들이 보유한 기술 리더십을 공고히 하고 기 보유한 역량을 극대화할 수 있는 방향으로 생태계 창출 전략을 시도하고 있다. 우리나라도 이러한 흐름에 맞추어 현대자동차, 삼성전자, LG와 같은 빅테크 기업이 로봇산업에 진출하고 있으며, 공공영역에서도 AI에 대한 국가재정의 투입, R&D 사업 등을 통해 기술확보와 산업 활성화를 달성하고자 노력하고 있다[9]. 그러나, 우리나라의 범용로봇 관련 경쟁력은 주요국 대비 부족하고 기술 의존도 또한 높은 상태이며 새로운 로봇 생태계 선점을 위한 효과적인 전략도 명확하게 제시되고 있지 못한 상태이다[10].
II. 범용 AI로봇 생태계 전략 비교
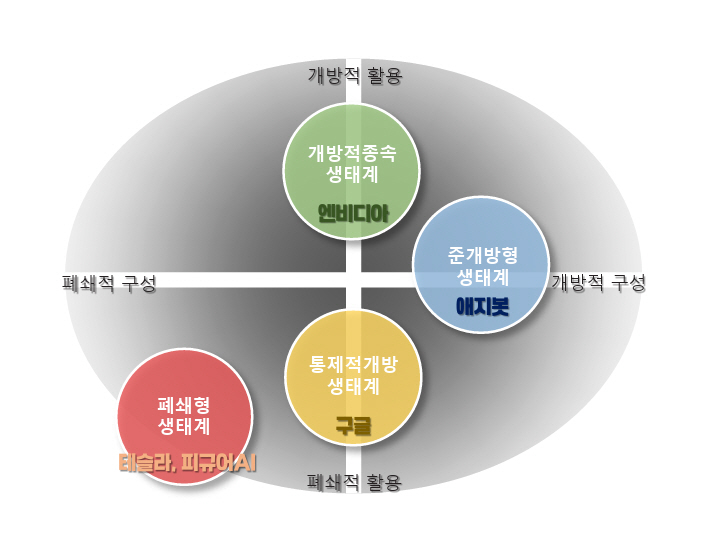
본 연구에서는 전 세계 주요 기업들이 범용로봇 생태계를 선점하기 위한 전략을 살펴보고 우리나라가 범용로봇 분야 생태계 전략 개발의 근거를 제공하고자 한다. 특히, 본고에서는 로봇을 구성하는 여러 기술 분야 중 두뇌에 해당하는 AI를 중심으로 전개되는 생태계 전략에 초점을 맞추어 생태계 ‘구성’과 ‘활용’의 측면에서 범용로봇 분야 주요 기업들의 전략을 그림 1과 같이 4가지로 분류하여 비교하였다.
1. 엔비디아: 개방적 종속 (Opened-Dependent)
엔비디아는 AI 분야에 이어 로봇 분야에서도 생태계 지배력을 확보하기 위한 전략을 적극적으로 수행하고 있다. 엔비디아는 2018년 이후 Isaac을 기반으로 다양한 형태의 AI 로봇 개발을 지원해 왔다. 그리고 CES2025에서 엔비디아의 젠슨 황은 로봇개발을 위한 월드파운데이션모델(WFM: World Foundation Model)인 ‘코스모스(Cosmos)’를 공개하며 로봇 분야로의 사업 범위 확대를 본격화하였다.
1.1 엔비디아의 로봇 생태계 구성
엔비디아에서 제공하는 AI기반 로봇 생태계는 연산처리장치부터 합성 데이터 생성과 학습을 위한 시뮬레이션 도구까지 아우르는 로봇 몸체를 제외한 대부분의 기능을 포함하고 있다. 현재 엔비디아에서 제공하고 있는 AI로봇 생태계 관련 플랫폼은 5개로 분류할 수 있으며, 개별 플랫폼들은 로봇 개발을 위한 AI기반 통합 솔루션 제공을 위해 유기적으로 동작하고 있다(그림 2).
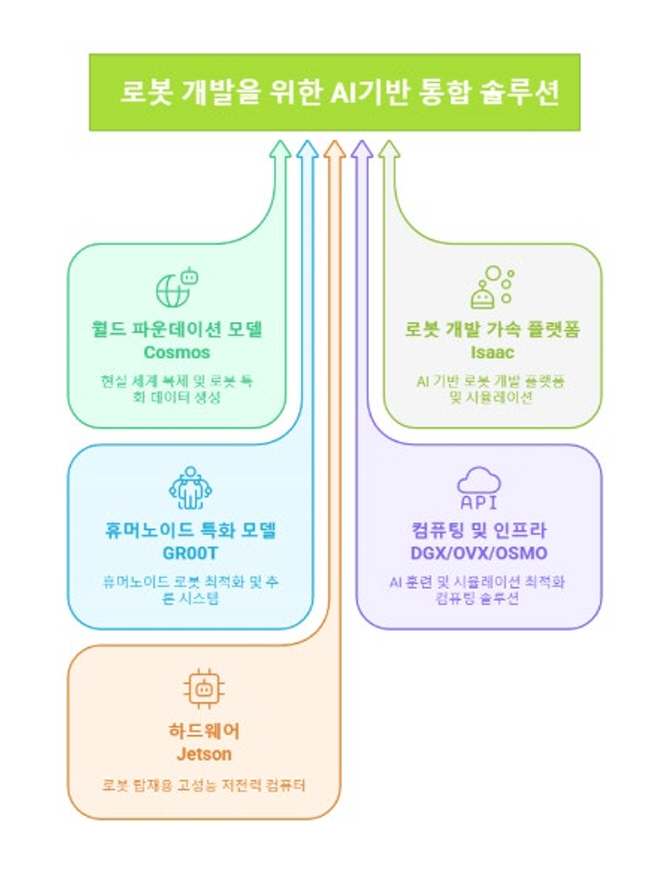
❶ 월드 파운데이션 모델(Cosmos): 엔비디아는 자사의 디지털 트윈 시뮬레이터 ‘옴니버스(Omniverse)’를 기반으로 구동되는 WFM인 Cosmos를 통해 현실세계를 동일하게 복제한 공간과 상호작용을 생성할 수 있는 가상환경을 제공한다. 특히, Cosmos는 범용로봇을 위한 합성 데이터 생성 모델(Cosmos Predict)과 휴머노이드 로봇을 위한 행동 계획 및 추론 데이터 생성 모델(Cosmos Reason)을 제공하며 로봇 특화 합성 데이터 생성을 강조하고 있다[11].
❷ 로봇 개발 가속 플랫폼(Isaac): Isaac은 AI기반을 로봇 개발을 위해 필요한 라이브러리, 프레임워크, AI모델 등을 포함하고 있는 로봇 특화 AI 개발 플랫폼이라고 볼 수 있다. Isaac은 로봇의 시뮬레이션 및 테스트를 위한 Isaac Sim[12], 로봇의 강화 및 모방학습을 위한 Isaac Lab(구, Isaac Gym), 그리고 ROS2와 연동되어 로봇의 실제 제어를 위한 모델을 제공하는 Isaac Manipulator & Perceptor로 구성되어 있다[13].
❸ 휴머노이드 특화 범용 파운데이션 모델(GR 00T): GR00T는 Isaac과 코스모스를 기반으로 범용 휴머노이드 로봇 폼팩터에 맞추어 최적화한 개방형 RFM(Robot Foundation Model) 이니셔티브이다[11]. GR00T는 복잡한 추론과 계획을 담당하는 시스템1(VLM)과 빠른 반응과 즉각적 행동을 담당하는 시스템2(Diffusion TF)의 이중 구조이다[14].
❹ 컴퓨팅 및 인프라: 엔비디아는 개발의 각 단계에서 최적화된 컴퓨팅 솔루션을 제공한다. 대규모 AI훈련(DGX), 시뮬레이션 워크로드(OVX), 로봇 탑재 및 배포(AGX), 그리고 이러한 시스템 전반을 아우르는 오케스트레이션 서비스(OSMO)까지 제공한다[15].
❺ 하드웨어(Jetson Series): Jetson은 로봇에 탑재하기 위해 개발된 온로봇(On-Robot) 컴퓨터이다. Jetson은 높은 성능뿐만 아니라 저전력 특성을 가지고, 개발자를 위한 통합 소프트웨어 개발 키트(SDK) 및 자사의 라이브러리가 포함되어 있어 우수한 개발 친화성을 제공한다[16].
1.2 엔비디아의 로봇 생태계 전략
엔비디아는 로봇을 직접 제조하는 대신 로봇 지능 개발을 위한 핵심 도구를 제공하고 있다. 이는 과거 AI 생태계에서 자사의 GPU와 CUDA(Compute Unified Device Architecture)를 통해 전 세계 시장을 장악한 CUDA 해자(Moat) 전략[17]을 로봇 분야에 적용한 것이라 할 수 있다. 엔비디아는 앞서 소개한 다양한 로봇 개발 기술 스택들을 통해 로봇 기업 및 개발자들을 자사의 생태계에 의존하도록 만드는 강력한 기술적 장악력을 구축하고 있다.
엔비디아 전략의 또 다른 핵심은 GR00T, Isaac Sim과 같은 로봇 개발을 위한 자사의 기술 스택들을 무료로 공개하고 있다는 점이다. 이는 진정한 의미의 ‘오픈소스(Open-Source)’와는 구별되는, 의도된 ‘제로 코스트 상용 소프트웨어(Zero-Cost Proprietary Software)’ 전략[18-20]이다. 그러나, 이러한 개발 도구들은 엔비디아의 독점적 하드웨어(Jetson)와 아키텍처(CUDA)하에서 최적화되어 있기 때문에 개발자들은 자연스럽게 엔비디아의 생태계로 유입되어 소프트 락인(Soft Lock-In)될 수 있다.
이러한 엔비디아의 생태계 편입 전략은 주요 로봇 기업과의 활발한 협력을 통해 더욱 힘을 얻고 있다. 엔비디아는 중국의 유니트리, 샤오펑, BYD 그리고 미국의 보스턴 다이내믹스, 애질리티 로보틱스와 같은 각국을 대표하는 주요 로봇 기업들과 파트너십을 체결하고 최적화된 로봇 개발 환경을 제공하고 있다. 즉, 이 로봇 기업들의 성장이 곧 엔비디아의 성장으로 이어지는 것이다.
정리하면 엔비디아의 전략은 로봇 생태계의 외연적 통제로 넓은 범위에서 사용자를 자신들의 로봇 환경에 종속시키지만, 활용에 대한 내재적 개방성을 제공하여 결과물의 자유로운 활용을 추구하는 전략이라고 볼 수 있다. 과거 AI 시장에서 압도적인 성공을 거둔 CUDA의 사례를 한층 더 정교하게 발전시켜 이식한 것이다. 즉, 1) 통합된 개발 플랫폼으로 강력한 기술적 종속성을 구축하고, 2) 소프트웨어 무료 공개라는 파격적인 전략으로 진입 장벽을 없애 개발자 커뮤니티를 흡수하며, 3) 핵심 하드웨어 판매를 통해 안정적인 수익을 창출하고, 4) 전략적 파트너십으로 시장 전체에 대한 영향력을 확보하는 다층적 접근을 통해 미래 로봇산업의 핵심 플랫폼 공급자(Key Platform Provider)로서의 지위를 선점하려 시도하고 있다.
2. 구글: 통제적 개방(Restricted-Open)
구글은 로봇의 지능과 플랫폼에 초점을 맞추고 로봇 생태계 확보에 도전하고 있다. 구글은 강력한 ICT 인프라 서비스(클라우드, 연산, 인프라 등)를 보유하고 있으며, 최근에는 RT-1과 RT-2를 거쳐 최신 RFM인 RT-X와 Gemini Robotics를 공개하였다[21]. 또한, 물리적 이해력에 특화된 Gemini Robotics ER[22]을 선보이며 로봇 생태계에서 강력한 기술 주도권을 확보해 나가고 있다. 더 나아가, 구글은 로봇과 관련된 오픈소스 생태계를 적극적으로 지원하며 개방형 로봇 생태계의 리더십을 확보하고자 시도하고 있다[23-25].
2.1 구글의 로봇 생태계 구성
구글은 개방된 로봇 생태계를 조성하기 위하여 오픈소스를 적극적으로 사용하고 있지만, 로봇 애플리케이션의 핵심 기술인 Gemini Robotics는 완전히 공개하고 있지 않다. 즉, 구글의 로봇 생태계는 로봇 개발을 위한 오픈소스 중심의 개방형 플랫폼, 제한적으로 개방하는 자사의 유관 서비스, 그리고 활용이 제한되어 있지만, 높은 활용 가치를 가진 서비스가 하나의 생태계 안에 공존하고 있다.
❶ 개방형 인프라(오픈소스): 구글이 로봇 분야에서 지원하고 있는 오픈소스 플랫폼은 표 1에 제시된 바와 같이 로봇 데이터(Open X-Embodiment)[26], 운영체제(ROS), 시뮬레이터(Gazebo)[24], 물리엔진(MuJoCo)[25] 등 다양한 범위를 포괄하고 있다. 또한, 구글은 단일 플랫폼뿐만 아니라 Open-RMF[27]와 같은 로봇 운용 프레임워크, A2A[23], 상호운용 프로토콜 등을 포함하여 높은 상호운용성을 갖춘 개방적 생태계를 구성하고 있다.
표 1 구글 개방형 로봇 인프라 현황
❷ 서비스 인프라: 구글이 보유하고 있는 기존 서비스들은 로봇 생태계에서 로봇의 개발, 운영, 학습에 필수적이며 유기적으로 통합될 수 있다. 특히 구글이 제공하고 있는 구글 클라우드 플랫폼(GCP), Vertex AI와 같은 서비스는 로봇 AI의 미세조정(Fine Tuning), 배포, 운영 관리 그리고 새롭게 생성되는 방대한 데이터의 수집-저장-분석-처리 등을 지원할 수 있으며[28,29], Gemini, Veo 등의 AI 모델들은 RFM을 개발하고 로봇 학습을 위한 가상의 합성데이터를 생성하는 등 로봇 개발의 핵심적 도구로 이미 활용되고 있다[21,30]. 또한 ‘안드로이드 OS’는 로봇용 앱을 만들고 배포할 수 있는 효과적인 기반을 제공하며, ROS와 같은 로봇 운영체제와 연동되어 로봇 애플리케이션 시장을 빠르게 확장하는 데 기여할 수 있다[31,32]. 게다가 구글의 전체 매출에서 67%를 차지하는 검색엔진과 유튜브[33]는 로봇이 실 세계를 학습하기 위한 원시데이터를 손쉽게 확보할 수 있는 유용한 통로가 된다[21,34]. 구글은 단순히 로봇 개발 생태계와 고성능 RFM을 단순히 제공하는 것을 넘어, 자사가 축적하고 있는 방대한 콘텐츠 데이터 및 AI, 클라우드, 데이터 인프라 등을 통해 구글의 로봇 생태계 진입 유인을 강화할 것으로 전망된다.
❸ 제한형 서비스: 로봇 생태계 관점에서 RFM은 높은 부가가치를 갖는 주요 사업모델로 고려된다. 구글은 로봇의 개발-학습-배포 등의 인프라 측면에서는 높은 개방성을 나타내고 있으나, RFM과 같이 로봇에 직접 연관된 포트폴리오들은 기본적으로 비공개 또는 일부만 공개된 폐쇄적 형태를 보인다. 대표적인 구글의 RFM인 RT-2, Gemini Robotics, Gemini Robotics ER은 대중에 완전히 공개되어 있지 않은데(RT-X-2는 부분 공개), 이는 과거 안드로이드OS는 완전히 개방했지만 구글의 핵심 서비스는 라이센스를 통제했던 GMS(Gmail, Map, play-Store) 전략모델[35]과 비슷한 전략적 기조를 따르는 것으로 볼 수 있다. 즉, 현재 구글이 보유한 RFM의 완성도와 관련된 인프라의 준비 수준이 충분히 사업성을 확보할 수 있을 때까지 비공개로 검증하고 있는 것으로 추측된다.
2.2 구글의 로봇 생태계 전략
구글은 미래 범용로봇 시장의 패권을 장악하기 위해, 단순한 기술 개발을 넘어 생태계 전체를 설계하는 다층적이고 정교한 전략을 구사하고 있다. 해당 전략의 핵심은 ‘개방’과 ‘통제’라는 상반된 두 가지 원칙을 의도적으로 결합하여, 생태계의 외연을 폭발적으로 확장하는 동시에 핵심기술(RFM)에 대한 경쟁적 우위를 극대화하는 데 있다. 구글은 로봇 개발의 기초가 되는 인프라 계층은 완전히 개방하여 참여를 유도하고, 개발 효율성을 높이는 도구는 제한적으로 개방하며, 로봇의 지능을 관장하는 최상위 AI 및 파운데이션 모델들은 폐쇄적으로 통제하는 통제적 개방 생태계를 구축하고 있다.
구글은 개발 인프라에 대해서는 ‘개방형 생태계’의 전략을 고수하고 있다. 구글은 ROS, Gazebo, Mu-JoCo와 같은 핵심 오픈소스 플랫폼을 지원하고, 에이전트 간 상호 운용성을 위한 A2A(Agent-to-Agent) 프로토콜 같은 새로운 표준을 제시하며 생태계의 기반을 다지고 있다. 또한, RT-2, Gemini Robotics 등의 RFM도 구조나 원리에 대해서는 논문의 형태로 투명하게 공개하고 있으며, Open-X-Embodiment와 같은 대규모 데이터셋을 구축하는 등 개방형 생태계를 위해 노력하고 있다. 이러한 개방 정책은 단기적인 수익보다는 장기적인 네트워크 효과(Network Effect)와 생태계 락인(Lock-in)을 목표로 한다. 개발자들이 구글이 지원하는 오픈소스 도구와 데이터셋에 익숙해질수록, 향후 구글의 상용 플랫폼을 선택할 가능성은 자연스럽게 높아지게 된다.
흥미로운 점은 구글이 로봇 개발에 대해서는 완전한 개방적 전략을 펼치고 있는 것과 반대로 로봇의 핵심 기술인 RFM에 대해서는 폐쇄적 전략을 택하고 있다는 점이다. 생태계의 가장 높은 부가가치가 창출되는 지점을 독점하여 높은 수익을 창출하고, 시장과 기술의 리더십 측면에서도 압도적인 경쟁 우위를 유지하기 위한 필연적인 전략적 선택으로 볼 수 있다. Gemini Robotics와 같은 고성능 파운데이션 모델은 로봇이 복잡한 작업을 수행하게 하는 ‘두뇌’로서, 그 자체로 막대한 시장 가치를 지닌다. 구글은 이 핵심 기술을 일종의 독점 자산(Proprietary Asset)으로 간주하며, 무분별한 공개로 인한 기술 유출 및 경쟁력 약화를 방지하고 있다. 이는 향후 API 기반의 서비스형 모델(AI-as-a-Service)이나 라이선스 판매를 통해 직접적인 수익을 창출하기 위한 기반이 된다.
구글의 범용로봇 생태계 전략은 개방형 인프라를 통해 외연을 확장하고, 폐쇄적인 핵심 기술을 통해 내재적 통제력을 유지하는 고도로 계산된 이중 전략으로 판단된다. 이는 전체 산업을 육성하여 시장의 규모를 키우는 동시에, 그 중심에서 자사의 핵심 AI 기술(Gemini Robotics 등)의 가치를 극대화하고 독점적 지위를 확보하려는 시도이다. 과거 안드로이드 운영체제는 오픈소스로 공개했지만, 구글의 핵심 서비스가 담긴 GMS(Gmail, Map, Search)는 라이선스를 통해 엄격히 통제했던 성공 사례처럼, 구글은 로보틱스 분야에서도 검증된 공식을 다시 한번 적용하고 있다.
3. 애지봇: 준개방형 생태계
중국의 애지봇(Agibot, 즈위안로보틱스)은 로봇의 지능부터 최종 제품 생산까지 전 과정을 통합하여 휴머노이드 로봇 분야에서 주목할 만한 기업으로 떠올랐다. 애지봇은 중국의 텐센트, BYD, JD.com 등 대형 투자자들의 참여로 사업 범위를 빠르게 휴머노이드 로봇의 가치사슬 전 범위로 확대할 수 있었다. 애지봇은 자사의 로봇지능 모델인 ‘GO-1’과 이를 탑재한 휴머노이드 로봇 제품의 판매 이외에 자사가 보유하거나 협력하여 구축한 대부분의 기술과 인프라를 오픈소스 형태로 개방하고 있다. 최근 애지봇은 자국 내 AI기업인 GRT, 남사과기(藍思科技) 등과의 협력을 통해 세계 최초의 풀스택 오픈소스 로봇인 ‘링시X1’을 출시한 바 있다[36].
3.1 애지봇의 로봇 생태계 구성
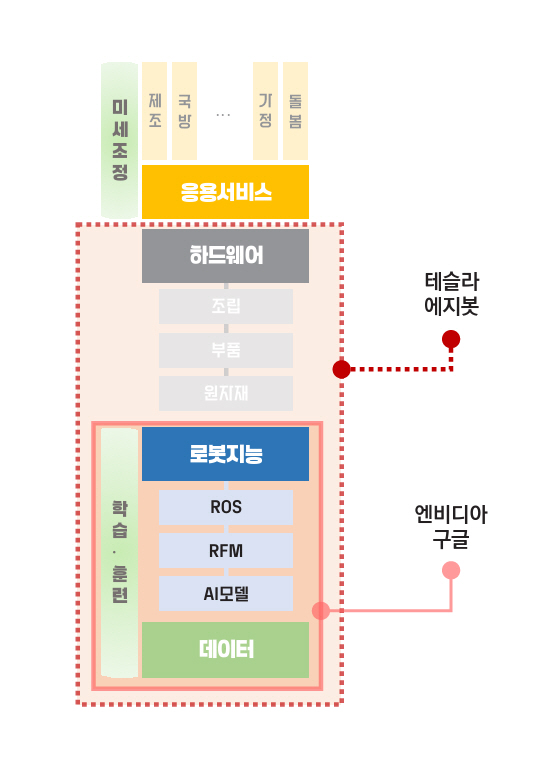
애지봇의 로봇 생태계는 로봇 학습, 두뇌, 그리고 하드웨어로 구성된다. 애지봇은 로봇 학습에 필요한 데이터, 두뇌, 그리고 완성로봇까지 생산 가능한 완전히 수직통합된 생태계를 확보하고 있다. 로봇 개발을 위한 다양한 플랫폼을 마련함에 있어 엔비디아와 같은 경쟁사의 플랫폼을 활용하기도 하지만, 대부분의 영역에서는 자국 내 기업과 오픈소스 생태계를 적극적으로 끌어들여 활용하고 있다.
❶ 로봇 학습: 애지봇은 로봇 학습을 위한 고품질 데이터의 생산, 저장, 처리를 위한 플랫폼을 보유하고 있다. 애지봇 월드(Agibot World)는 100만 개 이상의 로봇 작업 궤적 데이터를 포함하는 중국 최대 규모의 로봇 특화 개방형 데이터 플랫폼이다[37]. 그리고 애지봇 월드에 고품질의 로봇 궤적 데이터를 생산하고 공급하는 상하이에 있는 ‘AIDEA 데이터 팩토리’가 존재하며 100대의 실제 로봇이 일 평균 3~5만 건의 모션 데이터를 생성하여 데이터셋을 구축하고 있다[38]. 특히, AIDEA에서 생성되는 데이터는 애지봇 월드를 통해 개방되어 사용이 가능하지만, 사용자의 특수한 요구에 맞춘 최적화 데이터를 DaaS(Data as a Service) 형태로 제공하고 있다[37,39]. 이와 같은 포괄적인 데이터셋과 플랫폼을 개방된 형태로 제공함으로써 자사 로봇의 대규모 정책 학습의 가속화와 동시에 개방된 로봇 커뮤니티 전반의 혁신을 촉진하여, 잠재적으로 애지봇 월드를 미래 범용로봇의 벤치마크 데이터셋으로 확립하고자 시도하고 있다[37].
❷ 로봇 두뇌: 애지봇은 로봇 두뇌 영역에서도 개방형 전략의 기조를 유지하고 있으나, 핵심 로봇AI 기술에 대해서는 폐쇄적인 전략을 취하고 있다. 애지봇은 로봇의 런타임 프레임워크인 AimRT, RFM인 GO-1, 애지봇 월드 기반의 데이터 파이프라인 등은 오픈소스로 공개하고 있다[40,41]. 그러나 애지봇 로봇 개발의 핵심 기술인 EI-Brain과 WorkGPT, 이를 기반으로 개발된 시각잠재행동모델(ViLLA), 그리고 로봇 런타임 미들웨어시스템인 AgiROS은 자사의 로봇 독점기술로 외부에 공개하고 있지 않다. 다양한 RFM기반의 로봇 개발을 위한 개발 환경인 지니스튜디오(Genie Studio)는 사용량 기반의 종량제 서비스 형태로 제공되고 있다[42]. 애지봇의 이러한 전략 구성은 로봇 두뇌에 해당하는 AI 부분에서 경쟁적 기술 우위를 광범위한 오픈소스 커뮤니티의 혁신역량을 결합하여 전략적 상승효과를 창출하는 데 효과적일 것으로 보인다.
❸ 하드웨어: 애지봇은 로봇의 하드웨어를 설계하고 제작할 수 있는 역량을 가지고 있다. 애지봇은 크게 4개의 로봇 라인업(위안정, 링시, 지니, 줴천)을 보유하고 있다[41]. 위안정 모델(A1, A2)는 범용 휴머노이드 로봇으로 애지봇의 가장 핵심적인 제품군으로 애지봇의 AI모델이 탑재된 완성품 형태의 로봇이다. 링시(X1)는 완성품 형태의 로봇이라는 점은 위안정 모델과 유사하지만 개발자 및 연구자를 위한 풀스택 오픈소스 플랫폼이라는 점에서 차이가 있다. 지니(G1)는 애지봇 월드의 데이터 수집을 위한 전용 모델이며, 줴천(C5)은 청소작업에 특화된 상업용 로봇이다. 이와 같이 애지봇은 하드웨어 생산과 다각화를 통해 로봇 생태계의 수직통합을 완성하고 있으며 로봇 생태계 주도권 확보의 기반을 다지고 있다.
3.2 애지봇의 로봇 생태계 전략
애지봇의 전략은 로봇의 물리적 구현체인 하드웨어 설계의 일부와 데이터, 개발 플랫폼 및 인프라는 전략적으로 오픈소스로 개방하지만 핵심 지능을 구현하는 AI 기술은 철저히 비공개 및 독점화하여 기술적 해자(Moat)를 구축하는 이원적 성격을 갖는 준개방형 구조를 특징으로 한다. 애지봇은 자사의 RFM (GO-1)은 공개하고 이에 대한 원천기술(EI-Brain, WorkGPT 등)은 공개하지 않는다는 점에서 RFM 자체를 공개하지 않는 구글의 전략보다는 더 개방적이라고 볼 수 있다.
애지봇의 개방형 생태계 전략의 핵심은 전방위 생태계를 개방형으로 제공한다는 점에 있다. 애지봇 월드의 로봇 데이터셋을 CC BY-NC-SA 4.0 라이센스하에 공개하였고, 로봇의 효율적 개발을 위한 데이터 파이프라인, 런타임 프레임워크(AimRT), 자체 개발한 RFM(GO-1)도 대중에 공개하였다. 나아가, 일부 로봇(링시 X1) 하드웨어 설계도와 코드를 완전히 공개하며 세계 최초 풀스택 오픈소스 로봇 플랫폼을 출시하며 개방형 생태계에 대한 적극적 움직임을 나타냈다. 전체 로봇 생태계를 개방하는 것은 그 효과의 범위와 규모 면에서 파급효과가 더욱 강력할 수 있다. 또한, 데이터, 두뇌, 하드웨어를 모두 포괄하는 애지봇의 로봇 생태계는 개방형 생태계가 가지고 있는 태생적인 비효율성을 극복하기 위한 효과적인 대안이 될 수 있으며[43], 동시에 향후 생태계 지배권을 활용하여 수익성 높은 사업모델을 다각도로 구축할 수 있다[1].
전방위 로봇 생태계에 대한 강력한 개방 전략과 반대로 핵심 로봇 두뇌에 대한 AI 원천기술인 ViLLA 아키텍처 그리고 이에 근간이 되는 EI-Brain과 WorkGPT는 공개하지 않고, 향후 애지봇의 핵심 경쟁력과 수익모델 확보에 활용할 것으로 추측된다. 또한, 애지봇은 로봇 두뇌의 그라운딩을 위해 필요한 미들웨어인 ‘AgiROS’도 공개하고 있지 않은데 이는 주요 제품인 완성형 로봇의 가치를 유지하기 위함이라 볼 수 있다. 애지봇은 자신들의 생태계 확대를 위해 타 생태계와의 교집합을 만들기 위하여 AIDEA를 통한 맞춤형 데이터셋 제공, 다양한 AI모델을 개발에 사용할 수 있도록 지원하는 Genie Studio 등을 유료로 제공하고 있다. 이와 같은 전략적 장치들은 애지봇의 개방형 생태계로부터 발생하는 혁신 성과가 빠르고 과도하게 경쟁자에게 흡수되는 것을 차단하는 역할을 한다[44]. 즉, 애지봇의 개방형 전략이 생태계의 공격적 확장에 초점을 두고 있다고 한다면, 폐쇄형 전략은 장기적 관점에서 자신들의 핵심역량을 보호하려는 의도가 강한 것으로 판단된다.
결론적으로, 애지봇은 로봇 전방위 기술을 오픈소스로 공개하고 개방형 생태계를 조성함과 동시에 자사가 보유한 핵심 AI기술에 대해서는 폐쇄적 전략을 취하는 준개방형 생태계 전략을 표방하고 있다고 볼 수 있다. 수직통합과 개방을 통해 자사의 로봇 생태계의 범위와 영향력을 강화하며, 핵심 기술에 대한 폐쇄적 전략으로 경쟁우위를 지키는 것이 전략의 핵심으로 볼 수 있으며, 지금 당장의 이익보다 장기적 관점에서의 로봇 생태계 장악에 더 큰 방점을 둔 전략으로 판단할 수 있다. 이러한 준개방적 수직통합 전략은 자원 집약적이며 달성에 어려움이 있지만[45], 최적화를 통해 로봇의 학습효과 및 성능을 향상시켜줄 수 있으며[46], 애지봇이 보유하고 있는 거대한 개방형 생태계와 연계됨으로써 장기적으로는 시장 도달 범위를 확장시켜 더 거대하고 강건한 생태계로 확장될 수 있다[47]. 특히, 중국 정부와 투자자들의 전폭적 지지는 이러한 전략의 성공 가능성을 높이는 데 긍정적으로 작용할 수 있을 것이다.
4. 피규어AI&테슬라: 폐쇄형 생태계
4.1 피규어AI의 로봇 생태계 전략
피규어AI는 로봇 하드웨어로부터 시작한 기업이다. 초기 프로토타입인 피규어01은 물류 분야 노동력을 대체하기 위한 목적으로 제작되었고 이후 피규어02부터는 범용 휴머노이드를 목표로 개발이 이루어졌다. 그러나, 피규어AI는 로봇 지능에 대한 원천기술이 부족하였고, 이를 보완하기 위하여 2024년 OpenAI와의 파트너십을 체결하여 초기 AI역량을 확보할 수 있었다. 그리고 2025년 2월에 OpenAI와의 파트너십을 공식 종료하며 자체 개발한 로봇 지능인 Helix를 대중에 공개하였다[48].
피규어AI의 로봇 생태계 전략은 폐쇄적 협력(Closed Cooperation) 생태계 전략으로 볼 수 있다. 자신들이 로봇의 개발부터 대량 생산까지 완전히 통제함으로써 높은 효율성과 품질을 제공하는 것이다. 폐쇄적 생태계 구축을 위해 피규어AI는 크게 3가지 전략을 병행하고 있다. 첫 번째는 두뇌의 통합이다. 피규어AI는 로봇의 두뇌 측면에서 독자 RFM인 Helix를 개발하였고 이러한 결정 뒤에는 로봇의 핵심은 AI이며, AI의 수직적 통합이 로봇 생태계의 핵심이라는 판단이 있었다[49]. 또한, 피규어AI는 자신들의 주요 사업 모델로 제시하고 있는 RaaS가 수직통합된 폐쇄적 생태계 내에서 높은 효율성과 품질을 통해 달성될 수 있다고 강조하고 있다[50]. 두 번째는 시장(사용자)과의 접점을 중심으로 로봇 생태계의 수직통합을 진행하는 것이다. 로봇의 특성상 수행 작업에 따라 미세조정이 요구되는데, 피규어AI는 BMW 등 잠재적 고객과의 지속적인 피드백 과정을 통해 미래 시장의 실제적인 선점을 시도하고 있다. 마지막은 핵심기술에 대한 독립성 확보이다. 피규어AI는 로봇의 개발부터 대량 생산까지 전 과정을 폐쇄적인 생태계로 구축한다. 이 과정에서 외부 의존성으로 인해 발생할 수 있는 위험을 낮추기 위하여 로봇 두뇌와 대량 생산 기술의 완전한 자립을 목표로 하는 것으로 보인다. 이러한 노력의 하나로 클라우드에 의존하지 않는 자체 AI모델(Helix) 개발 및 수직통합 생산시설(BotQ)[51] 등을 구축해 나가고 있다.
4.2 테슬라의 로봇 생태계 전략
테슬라는 2021년 휴머노이드 로봇 옵티머스(Optimus)의 개발을 공식적으로 착수하며 로봇산업 진출을 선언했다. 이후 2022년에는 실제 보행이 가능한 1세대 옵티머스를 공개하며 기술적 진보를 입증했고, 2023년에는 더욱 정교한 동작 수행이 가능한 2세대 모델을 선보이며 개발 속도와 완성도를 높여가고 있다. 테슬라는 2026년까지 옵티머스의 판매 가격을 2만 달러 이하로 책정하고, 2025년부터는 자사 생산 시설에 수천 대의 옵티머스를 배치하여 생산 효율성을 극대화할 계획임을 밝히는 등[52] 공격적인 시장 진입 전략을 구사하고 있다.
테슬라는 휴머노이드 로봇에 대하여 처음부터 현재까지 폐쇄적 독립 생태계(Closed-Independence)를 구축하기 위해 노력하고 있다. 지금까지 공개된 테슬라의 로봇 생태계를 구성하는 핵심 요소는 자율 이동기술, End-to-End 신경망, AI훈련 인프라, 대량 생산 인프라로 볼 수 있다. 먼저 자율이동기술은 테슬라가 강점이 있는 영역으로, 자율주행 기술에 사용된 시각지능과 내비게이션 기술을 옵티머스에 공유하고 있다[53,54]. 테슬라는 자체 개발한 End-to-End 신경망 모델을 로봇에 사용하고 있어 로봇 생태계의 핵심이 되는 로봇 두뇌에 있어서 독립성을 확보하고 있다. 다음은 AI훈련 인프라이다. 알려진 바에 따르면 테슬라는 자체적 플랫폼을 통해 로봇AI 학습을 위해 모방학습[55], 강화학습[56], 시뮬레이션 학습[57] 등을 수행하고 있는 것으로 추측된다. 마지막은 대량생산 인프라이다. 이 부분은 테슬라 로봇 생태계 중 사업성과 관련된 핵심적 요소이다.
종합적으로 볼 때, 테슬라의 로봇 생태계 전략은 자사가 보유한 핵심 역량, 즉 자율주행 기술, AI 개발 능력, 그리고 대량 생산 노하우를 최대한 활용하여 폐쇄적이고 독립적인 로봇 생태계를 구축하는 방향으로 전개되고 있다. 이러한 생태계 전략은 이미 높은 내부 역량과 확고한 시장 지위를 확보한 기업의 경우, 신규 사업 추진에 있어 효율적일 수 있다[58]. 자체적인 연구 개발, 생산, 그리고 소프트웨어 플랫폼을 통합함으로써 외부 의존성을 줄이고, 기술 개발 및 제품 출시 주기를 단축할 수 있기 때문이다[59].
III. 결론 및 시사점
1. 결론
범용 AI로봇 생태계 선점과 시장 지배력 강화를 위해 주요 기업들은 각자가 놓인 환경과 기보유한 역량을 극대화할 수 있는 방향으로 전략을 추진하고 있다. 엔비디아는 생태계 구성에 대해서는 폐쇄적이지만 활용과 배포의 측면에서는 개방성이 높은 것으로 보인다. 구글은 생태계 구성에 있어서는 개방적이지만 서비스 인프라와 핵심 AI기술 및 로봇 파운데이션 모델에 대해서는 통제적 형태를 보이고 있다. 중국의 애지봇은 핵심 기술은 폐쇄적으로 통제하지만, 그 외의 생태계는 모두 개방하여 풀스택 오픈소스 로봇 생태계를 제공하고 있다. 피규어AI와 테슬라는 생태계 구성과 활용 측면에서 폐쇄적이지만 피규어AI는 외부 기업과의 협력관계를 적극적으로 활용한다는 특징이 있다. 분석결과에 대한 주요 결과는 표 2와 그림 3에 정리되어 있다.
표 2 범용 AI로봇 주요 기업 전략 분석 요약
2. 시사점
범용로봇 시장은 본격적으로 아직 시작되지도 않은 초기 단계이다. 또한, 우리 사회, 경제, 기술적으로 많은 변화가 일어나고 있어 전략적 정답지를 고르는 것은 어려운 일이다. 하지만 기존의 주요 기업들의 로봇 생태계 전략을 비교함으로써 얻을 수 있는 몇 가지 함의점이 있다.
첫째, 기 보유한 자원과 역량에 맞추어 로봇 생태계 내 전략적 위치를 설정해야 한다. 분석을 통해 엔비디아의 압도적인 하드웨어 시장 장악력, 구글의 AI기술력과 방대한 데이터 및 인프라, 테슬라의 수직통합 역량이 각 기업의 로봇 생태계 전략과 밀접하게 연결되어 있다는 것을 확인할 수 있었다.
둘째, 외부 환경과 경쟁 상황의 변화를 고려하여야 한다. 범용로봇 분야는 변동성이 매우 높은 분야이므로, 이러한 변동성을 공격적으로 활용하려는 자세가 필요하다. 피규어AI가 유동적 파트너십을 통해 필요한 역량 고객을 빠르게 흡수한 것과 애지봇이 풀스택 오픈소스 플랫폼을 제공하여 기존의 생태계를 흡수하려는 시도는 환경의 변동성을 이용한 전략으로 볼 수 있다.
셋째, 범용로봇의 기술적 특성을 고려해야 한다. 로봇은 복합기술체이므로 단일 영역(예: 액추에이터, 센서, 연산장치, 배터리 등)에서의 승자가 전체 시장을 장악하기 어려운 구조이다. 또한, 로봇의 핵심이 AI 기반의 로봇 두뇌로 변화해 가면서 기존 로봇 가치사슬과 다른 형태를 나타낸다. 이것은 주요 기업들이 로봇 기술이 아닌 ‘생태계’ 측면으로 전략을 전개하는 이유로 볼 수 있다.
우리나라가 세계 로봇 시장에서 생태계 주도권을 가지고 산업을 주도하기 위해서는 우선적으로 국가의 역량을 결집하고 혁신이 일어날 수 있는 안정적 환경을 조성해야 하며, 결집된 역량을 투입할 전략적 위치를 지정하는 것이 필요하다. 주요 기업의 전략 사례를 살펴본 결과, 우리나라가 범용로봇 생태계에서 일정 수준 이상의 높은 지배력을 확보하기 위해서는 우리 역량을 극대화함과 동시에 부족한 부분은 외부 역량을 통해 보완하는 것이 효과적인 전략일 가능성이 높다.
따라서, 지금은 일정 수준 이상의 로봇과 AI 분야에 대한 원천기술에 대한 자체적 확보 및 외부역량 활용(아웃소싱 등) 포트폴리오 전략을 세워 결집된 국가적 역량의 선택과 집중이 중요한 시기이다. 즉, 당장 수익이 창출되는 분야보다는 다가올 미래에 요구되는 역량과 자원을 준비하는 것이 중요한 시기이다. 하지만, 현재의 선도국과 우리나라의 기술격차는 적지 않아 과거와 같은 패스트 팔로워 전략이 통하지 않을 가능성이 높다. 따라서, 당분간 원천기술 확보는 로봇에 필수적인 핵심 기술격차를 줄이는 데 초점을 맞춘 집중적 R&D가 이루어질 필요가 있다. 또한, 현재 로봇 분야에서 원천기술 개발을 통해 우리나라가 시장 경쟁력 확보는 데에는 한계가 있기 때문에 더 실용적이고 시장 지향적(Market-Oriented)인 전략이 함께 강조될 필요가 있어 보인다. 예를 들어, 경쟁자들이 아직 진출하지 않은 로봇 응용서비스 분야, 특화 로봇 분야로 빠르게 진출해서 우리나라 주도의 개방형 생태계를 형성하거나, MCP(Model Context Protocol)와 같은 로봇 영역의 개방형 표준 프로토콜 플랫폼을 통해 개방형 RFM 생태계를 구축하는 것도 고려해 볼 수 있을 것이다.
용어해설
런타임프레임워크 특정 프로그래밍 언어로 작성된 애플리케이션이 실행(런타임)될 수 있도록 필요한 환경과 기능을 제공하는 소프트웨어 기반
로봇파운데이션모델 로봇이 물리적 세계를 이해하고, 다양한 작업을 범용적으로 수행할 수 있도록 돕는 대규모 인공지능 모델
범용AI로봇 인간과 유사한 수준의 지능을 가지고 다양한 작업을 수행할 수 있는 AI기반 로봇
소프트웨어개발키트 개발자가 특정 하드웨어 플랫폼, 운영체제(OS), 또는 소프트웨어 서비스에 특화된 애플리케이션을 만들 때 필요한 모든 도구와 자료를 한데 모아 놓은 패키지
월드파운데이션모델 현실세계 환경을 시뮬레이션하고 예측하는 데 사용되는 고급 인공지능 모델
합성데이터 실제 데이터를 기반으로 생성되었지만 인공적인 가상의 데이터
해자 중세 시대의 성곽 방어 시설 중 하나로, 적의 접근을 어렵게 하는 성(城) 주위를 둘러싸고 있는 인공적인 수로
Model Context Protocol AI 모델, 특히 대규모 언어 모델(LLM)이 외부 도구, 시스템 및 데이터 소스와 효율적이고 표준화된 방식으로 상호 작용할 수 있도록 돕는 개방형 표준 프레임워크
K. Rong et al., "Linking business ecosystem lifecycle with platform strategy: a triple view of technology, application and organisation," Int. J. Technol. Manag., vol. 62, no. 1, 2013, pp. 75-94.
J.H. Kim et al., "Exploring Innovation Ecosystem of Incumbents in the Face of Technological Discontinuities: Automobile Firms," Sustainability, vol. 14, no. 3, 2022.
A. Radziwon et al., "Ecosystem effectuation: creating new value through open innovation during a pandemic," R&D Manag., vol. 52, pp. 376-390.
J.A. Euchner, "Two Flavors of Open Innovation," Res. Technol. Manag., vol. 53, no. 4, 2010, pp. 7-8.
M. Schreieck et al., "From product platform ecosystem to innovation platform ecosystem: An institutional perspective on the governance of ecosystem transformations," J. Assoc. Inf. Syst., vol. 23, no. 6, 2022, pp. 1354-1385.
J. Zhao, "The relationship between coupling open innovation and innovation performance: the moderating effect of platform openness," Technol. Anal. Strateg. Manage., vol. 35, 2021, pp. 137-152.
K. Frenken, "Technological innovation and complexity theory," Econ. Innov. New Technol., vol. 15, 2006, pp. 137-155.
산업통상자원부, "올해 산업AI 개발·확산에 4787억원 투자…글로벌 AI 경쟁주도," 대한민국 정책브리핑, 2025. 5. 28. https://www.korea.kr/news/policyNewsView.do?newsId=148943783
진운용, "中, 정부 주도 로봇 데이터 공유…AI 패권 ‘성큼’," EBN 산업경제, 2025. 6. 11. https://www.ebn.co.kr/news/articleView.html?idxno=1665963
NVIDIA et al., "GR00T N1: An Open Foundation Model for Generalist Humanoid Robots," arXiv preprint, 2025. doi: 10.48550/arxiv.2503.14734
NVIDIA Isaac Sim. https://developer.nvidia.com/isaac/sim
Y. Pan et al., "Advancing Robot Learning, Perception, and Manipulation with Latest NVIDIA Isaac Release," NVIDIA, 2025. 1. 6. https://developer.nvidia.com/blog/advancing-robot-learning-perception-and-manipulation-with-latest-nvidia-isaac-release/
NVIDIA Korea, "휴머노이드 로봇 위한 ‘Project GR00T’ 파운데이션 모델 공개," NVIDIA, 2024. 3. 21. https://blogs.nvidia.co.kr/blog/foundation-model-isaac-robotics-platform/
NVIDIA Isaac. https://developer.nvidia.com/isaac
C. Shah and D. Sinha, "Announcing NVIDIA Metropolis Microservices for Jetson for Rapid Edge AI Development," NVIDIA, 2024. 1. 25. https://developer.nvidia.com/blog/announcing-metropolis-microservices-on-nvidia-jetson-orin-for-rapid-edge-ai-development/
S. Kanuri and R.W. McLeod, "Sustainable competitive advantage and stock performance: the case for wide moat stocks," Appl. Econ., vol. 48, no. 52, 2016, pp. 5117-5127.
R. Sen, "A Strategic Analysis of Competition Between Open Source and Proprietary Software," J. Manage. Inf. Syst., vol. 24, 2007, pp. 233-257.
U. Holtgrewe and R. Werle, "De-Commodifying Software? Open Source Software Between Business Strategy and Social Movement," Sci. Technol. Stud., vol. 14, no. 2, 2001, pp. 43-65.
A. Bonaccorsi et al., "Entry Strategies Under Competing Standards: Hybrid Business Models in the Open Source Software Industry," Manag. Sci., vol. 52, no. 7, 2006, pp. 1085-1098.
A. Brohan et al., "RT-2: Vision-Language-Action Models TransferWeb Knowledge to Robotic Control," arXiv preprint, 2023. doi: 10.48550/arXiv.2307.15818
G.R. Team et al., "Gemini Robotics: Bringing AI into the Physical World," arXiv preprint, 2025. doi: 10.48550/arxiv.2503.20020
R. Surapaneri et al., "Announcing the Agent2Agent Protocol (A2A)," Google for Developers, 2025. 4. 9. https://developers.googleblog.com/en/a2a-a-new-era-of-agent-interoperability/
Google Summer of Code, "Open Robotics," https://summerofcode.withgoogle.com/programs/2025/organizations/open-robotics
MuJoCo, "Advanced Physics Simulation," https://mujoco.org/
O. X.-E. Collaboration et al., "Open X-Embodiment: Robotic Learning Datasets and RT-X Models," arXiv preprint, 2023. doi: 10.48550/arxiv.2310.08864
Open Robotics. https://www.openrobotics.org/
Google Cloud Website. https://cloud.google.com/vertex-ai/docs/start/introduction-unified-platform?hl=ko
정한영, "[AI 리뷰] 구글 ‘버텍스 AI’, 생성 인공지능을 구현하는 두 가지 새로운 기능과 모델이 상호작용하는 5가지 방법," 인공지능신문, 2023. 4. 23. https://www.aitimes.kr/news/articleView.html?idxno=27860
Q. Vuong and P. Sanketi, "Scaling up learning across many different robot types," Google DeepMinde, 2023. 10. 3. https://deepmind.google/discover/blog/scaling-up-learning-across-many-different-robot-types/
HTEC, "Why ROS (Robot Operating System) is ‘Android for Robotics’," https://htec.com/insights/blogs/why-ros-is-android-for-robotics/
C. Eze and C, Crick, "Learning by Watching: A Review of Video-based Learning Approaches for Robot Manipulation," arXiv preprint, 2024. doi: 10.48550/arxiv.2402.07127
A. Possemato et al., "Trust, But Verify: A Longitudinal Analysis Of Android OEM Compliance and Customization," in Proc. IEEE Symp. Secur. Privacy, (San Francisco, CA, USA), May. 2021, pp. 87-102.
김신영, "GRT "‘남사과기·애지봇’ 협력…세계 최초 오픈 소스 풀스택 로봇 출시"," 뉴스핌, 2025. 3. 5. https://www.newspim.com/news/view/20250305000117
Agibot-World-Contributors et al., "AgiBot World Colosseo: Large-scale Manipulation Platform for Scalable and Intelligent Embodied Systems," arXiv preprint, 2025. doi: 10.48550/arXiv.2503.06669
R. Tayyab, "China’s Agibot Races to Compete with Elon Musk’s Optimus in Robot Production," TECHi, 2025. https://www.techi.com/chinas-agibot-races-compete-elon-musks-optimus-robot-production/
Agibot RAISE A1 Website. https://www.agibot.com/products/AIDEA
W. Thinker, "The blueprint code is completely open source! Zhihuijun: Everyone can build a humanoid robot!," EEWORLD, 2024. 10. 28. https://en.eeworld.com.cn/news/robot/eic683049.html
Agibot Website. https://www.agibot.com/about_Zhiyuan
Agibot Genie Studio Website. https://genie.agibot.com/en/geniestudio
A. Hernandez-Vivanco et al., "Relating open innovation, innovation and management systems integration," Ind. Manag. Data Syst., vol. 116, no. 8, 2016, pp. 1540-1556.
D. Acemoglu et al., "Determinants of Vertical Integration: Financial Development and Contracting Costs," J. Finance., vol. 64, no. 3, 2009, pp. 1251-1290.
P.W. Stonebraker and J. Liao, "Supply chain integration: exploring product and environmental contingencies," Supply Chain Manage., vol. 11, no. 1, 2006, pp. 34-43.
X. Wan et al., "Impact of O2O platform multihoming and vertical integration on performance of local service firms - a quantile regression approach," Internet Res., vol. 30, no. 5, pp. 1583-1610.
FigureAI, "Helix: A Vision-Language-Action Model for Generalist Humanoid Control," 2025. 2. 20. https://www.figure.ai/news/helix
M. Kalil, "Figure Splits Up with OpenAI, Claims AI Breakthrough," KALIL 4.0, 2025. 2. 5. https://mikekalil.com/blog/figure-openai-breakup/
TSG IVEST Website. https://tsginvest.com/figure-ai/
FigureAI, "BotQ: A High-Volume Manufacturing Facility for Humanoid Robots," 2025. 3. 15. https://www.figure.ai/news/botq
이혜진, "발레에 셔플댄스까지... 머스크가 공개한 춤추는 옵티머스 보니," 조선일보, 2025. 5. 14. https://www.chosun.com/economy/tech_it/2025/05/14/UAX7GE3Y75CF7FACZJZRXYPYQ4/
Z. Visconti, "Tesla’s applications for Dojo in FSD, Optimus and potentially more," TESLARATI, 2023. 10. 3. https://www.teslarati.com/tesla-dojo-fsd-optimus-more/
M. Merano, “Tesla recruits data collection operators for Optimus bot development,” TESLARATI, 2025. 5. 14. https://www.teslarati.com/tesla-optimus-data-collection-operator-job/
이정현, “[영상] 테슬라 옵티머스 로봇, 발레·셔플 댄스까지 섭렵,” ZDNET Korea, 2025. 5. 14. https://zdnet.co.kr/view/?no=20250514154558
K. Singh, “Tesla’s Optimus Robot Learns to Walk Without Vision [VIDEO],” not a tesla app, 2024. 12. 13. https://www.notateslaapp.com/news/2435/teslas-optimus-robot-learns-to-walk-without-vision-video
T. Kumpe and P.T. Bolwijin, “Manufacturing: the new case for vertical integration,” Harv. Bus. Rev., vol. 66, 1988, pp. 75-81.
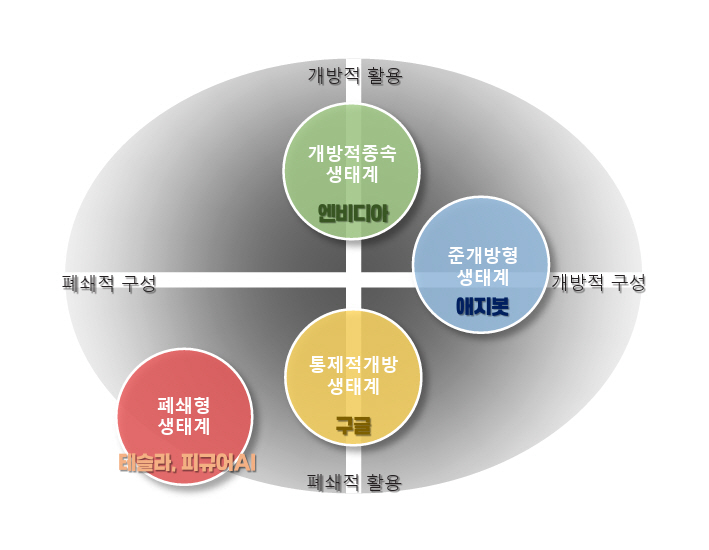
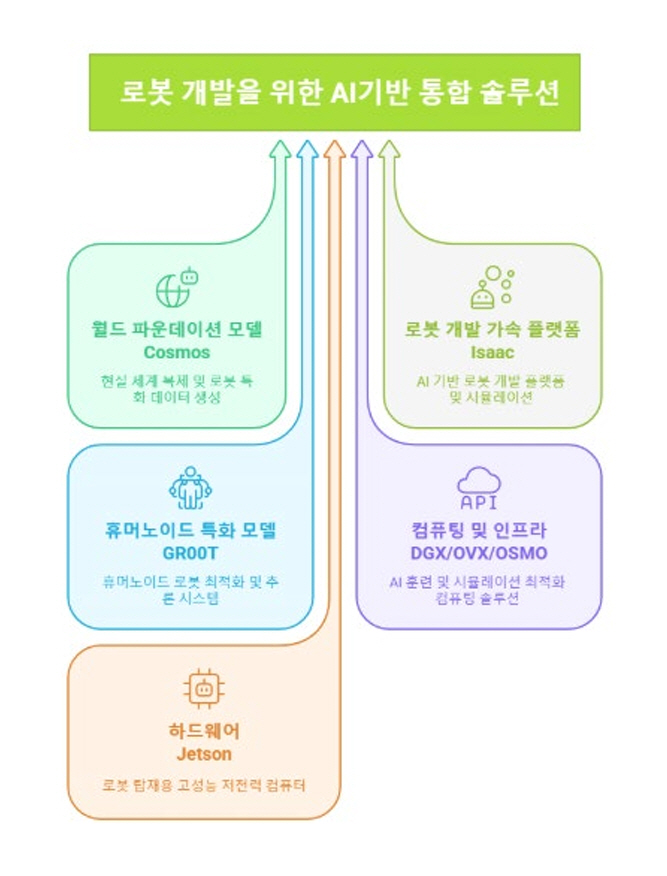
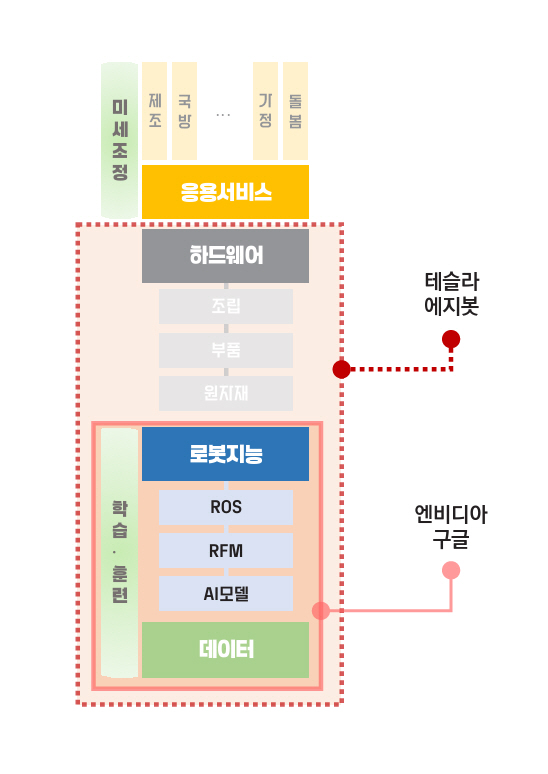
표 1 구글 개방형 로봇 인프라 현황
표 2 범용 AI로봇 주요 기업 전략 분석 요약
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.