자율주행차 운전자 모니터링 시스템 평가를 위한 글로벌 안전기준 동향 분석
Trends in Global Safety Standards Used for Evaluating Driver Monitoring Systems in Autonomous Vehicles
- 저자
-
김현숙AI로봇UX연구실 hyskim@etri.re.kr 김우진AI로봇UX연구실 wjinkim@etri.re.kr 장은혜AI로봇UX연구실 cleta4u@etri.re.kr 오천인AI로봇UX연구실 cioh@etri.re.kr 이승준AI로봇UX연구실 lsj0209@etri.re.kr 윤대섭AI로봇UX연구실 eyetracker@etri.re.kr 최정단AI로봇연구본부 jdchoi@etri.re.kr
- 권호
- 40권 6호 (통권 217)
- 논문구분
- 미래 지능사회구현을 위한 인공지능 로봇기술 동향
- 페이지
- 45-54
- 발행일자
- 2025.12.01
- DOI
- 10.22648/ETRI.2025.J.400605
 본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.
본 저작물은 공공누리 제4유형: 출처표시 + 상업적이용금지 + 변경금지 조건에 따라 이용할 수 있습니다.- 초록
- According to the SAE J3016 standard, a driver҆s role varies with the level of driving automation. Driver monitoring systems (DMSs) are critical for ensuring safety below Level 3, where control transitions between the system and the driver may occur. This study reviews international DMS evaluation regulations and protocols, focusing on the European Union҆s ADDW, Euro NCAP, and UNECE WP.29 regulations. These regulations establish criteria for assessing transient and non-transient driver states and specify the corresponding vehicular response requirements. Transient states include the evaluation of long and short distractions and phone use, with an emphasis on assessing where the driver҆s gaze is fixed during these tasks. By contrast, non-transient states consist of non-fatigue, drowsiness, microsleep, sleep, and unresponsiveness, all of which define specific test procedures. Warnings must integrate visual, acoustic, and haptic signals; if they persist beyond a defined threshold, a takeover request must be initiated. These global regulations are essential for developing a DMS that can accurately assess the driver҆s status and be seamlessly integrated within vehicular control. However, it is difficult to reproduce the diverse conditions required for DMS evaluation—such as complex traffic environments and individual differences in driver behavior—through real-road driving or simulator tests alone. To address this limitation, virtual driver generation technology can be used to simulate realistic driving behaviors and gaze patterns, thereby creating synthetic data for DMS evaluation. Future research will focus on developing generative AI-based virtual driver models to evaluate DMS performance and verify their consistency with real driving environments, ultimately reducing testing time and cost and promoting the efficient advancement of the DMS technology ecosystem.
Share
I. 서론
자율주행기술의 발전은 운전자와 차량 간의 상호작용을 혁신적으로 변화시키고 있다. Society of Automotive(SAE) J3016에 따르면 자율주행은 SAE 레벨0(자동화 없음)부터 SAE 레벨5(완전 자율 주행)까지 구분되며, 각 단계별로 운전자의 역할이 달라진다[1]. 레벨4 이상에서는 운전자의 개입이 필요 없지만, 레벨3 이하에서는 자율주행 시스템과 운전자 간의 제어권 전환이 발생할 수 있으므로 차량 내에서 운전자의 상태와 준비성을 평가하는 운전자 모니터링 시스템(Driver Monitoring System)의 중요성이 더 강조된다.
운전자의 상태는 크게 일시적 상태(Transient State)와 비일시적 상태(Non-Transient State)로 구분할 수 있다. 일시적 상태는 운전자가 차량 제어 및 도로 주시에 대한 집중이 잠시 줄어들지만 즉시 회복 가능한 경우를 의미하며, 장시간 주의분산(Long Distraction), 단시간 주의분산(Short Distraction) 또는 시각적 주의 시간 분할(VATS: Visual Attention Time Sharing), 휴대전화 사용(Phone Use) 등이 해당한다. 비일시적 상태는 운전 수행 능력이 부분적 또는 완전히 저하되어 운전을 멈추고 휴식을 취해야 회복이 가능한 경우를 의미한다. 여기에는 운전 능력 저하(Impairment), 피로 누적으로 인한 마이크로슬립(Microsleep), 수면(Sleep), 그리고 갑작스러운 질병이나 극심한 피로로 반응하지 않는 운전자(Unresponsive Driver) 상태가 포함된다. 특히 운전 능력 저하는 운전 성능을 떨 어뜨려 사고 위험을 높이는 상태로, 피로 누적에 따른 졸음이나 수면으로 점차 나타날 수도 있고, 음주나 약물 사용과 같이 피로와 무관하게 운전을 시작할 때부터 바로 발생할 수도 있다[2].
따라서 DMS는 운전자의 일시적, 비일시적 상태를 평가하여 적절한 시점에 차량 반응과 개입을 유도하는 기술 및 시스템으로 개발되어야 한다[3,4].
본고에서는 ADDW, Euro NCAP, UNECE WP.29 등 국제 안전 기준에서 제시하는 DMS 평가 방법 및 프로토콜을 분석하고, 이러한 국제기준들이 운전자의 주의분산과 피로를 어떻게 평가하는지에 대해 기술한다.
II. ADDW에서 요구되는 DMS 평가프로토콜
1. ADDW 도입 배경과 적용 시기
2019년 한 해 동안 유럽 도로에서는 약 22,800명이 교통사고로 사망하였으며[5], WHO에 따르면 23초마다 교통사고로 인해 인명이 손실되는 통계가 있다[6]. 이러한 심각한 교통 안전 문제에 대응하기 위해 유럽 연합(EU)은 일반 안전 규정(GSR: General Safety Regulation)이라는 측정 기준을 채택하였다.
EU GSR에서는 차량 안전성을 강화하기 위해 모든 유럽 차량에 첨단 운전자 주의분산 경고(ADDW: Advanced Driver Distraction Warning) 시스템을 의무화 할 예정이다. ADDW 시스템은 운전자가 교통 상황에 지속적으로 주의를 기울일 수 있도록 지원하며, 운전자의 주의가 산만해졌을 때 이를 감지하여 경고하는 기능을 제공한다[7].
유럽에서는 2024년 7월 7일부터 새로 개발되거나 유형 승인을 받은 모든 차종에 ADDW 기술을 탑재한다는 규정이 시행된다. 2026년 7월 7일부터는 시장에 이미 출시된 모델을 포함하여 모든 새 차량에 ADDW 기술이 필수적으로 포함되어야 한다. 이를 위해 자동차 제조업체들은 2021년부터 차량에 필요한 센서와 DMS 소프트웨어 설치 절차를 시작하였으며, 이는 DMS 시장의 급속한 성장을 촉진하고 있다.
2. ADDW 운전자 시선 고정 지점
ADDW 시스템 현장 점검 테스트는 표 1에 제시된 시선 고정 지점 중 최소한 한 곳을 포함해야 한다[8]. 이러한 시선 고정 지점은 운전자가 실제 주행 중 주의를 기울이는 대표적인 위치로, ADDW 시스템이 운전자의 시선 분산을 효과적으로 감지할 수 있도록 선정된 지점이다.
표 1 ADDW 시스템의 시선 고정 지점
출처 Reproduced from European Union, “ANNEX I, PART 2: Test procedures for spot-check testing of ADDW systems by type approval authorities and technical services,” in Commission Delegated Regulation (EU) 2023/2590, Official Journal of the European Union, 2023. 7. 13. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX%3A32023R2590
3. ADDW 운전자 주의분산 평가
ADDW 시스템은 차량 주행 속도에 따라 운전자 주의분산의 평가 기준이 다르게 적용된다. 표 2는 속도 구간별 ADDW 시스템의 주의분산 모니터링을 평가하는 방법을 명시한다. 시속 20km/h 이상일 때 운전자 시선이 표 1에 명시된 고정 지점에 최대 6초 동안 지속되면 즉시 운전자에게 경고해야 한다. 시속 50km/h 이상에서는 최대 3.5초 동안 지속되면 즉시 경고해야 한다. 테스트는 각각 시속 20~35km/h와 50~65km/h 범위에서 수행하고, 각각의 범위에서 0.5초의 불확실성 버퍼를 포함하여 수행한다. 테스트는 두 번의 시도까지 허용되며, 두 번 모두 실패할 경우 ADDW 시스템의 주의분산 평가 기능이 실패한 것으로 평가한다[8].
표 2 ADDW 시스템의 주행 속도 조건별 운전자 주의분산 평가 기준
| 구분 | 속도 20~35km/h | 속도 50~65km/h |
|---|---|---|
| 경고 조건 | 6.5초 이내 경고(0.5초 버퍼 포함) | 4초 이내 경고(0.5초 버퍼 포함) |
| 판정 기준 | 지점당 최대 2회 시도 가능, 두 번 모두 실패 시 불합격 | 지점당 최대 2회 시도 가능, 두 번 모두 실패 시 불합격 |
출처 Reproduced from European Union, “ANNEX I, PART 2: Test procedures for spot-check testing of ADDW systems by type approval authorities and technical services,” in Commission Delegated Regulation (EU) 2023/2590, Official Journal of the European Union, 2023. 7. 13. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX%3A32023R2590
4. ADDW 차량 반응 요구사항
ADDW 시스템은 주의분산이 발생한 경우 시각, 청각, 촉각 인터페이스를 이용하여 경고를 발생해야 한다[7].
시각 경고는 낮과 밤 모두 운전자가 쉽게 보고 인식할 수 있는 위치에 있어야 하며, 운전자의 혼란을 야기하지 않아야 한다. 시각 경고는 지속적 또는 점멸 신호(예: 경고등, 팝업 메시지 등)로 제공할 수 있다.
청각 경고는 운전자가 인식할 수 있는 충분한 시간 동안 지속되어야 한다. 주파수는 200~8,000Hz, 진폭은 50~90dB 범위에서 설정한다. 차량 제조업체는 주변 소음 수준에 따라 진폭을 조정할 수 있다. 음성 경고를 사용하는 경우, 시각 경고와 동일한 의미를 가지는 어휘를 사용해야 한다.
촉각 경고는 운전자가 쉽게 인지하고, 운전자가 주행 작업에 다시 집중할 수 있도록 예상 가능한 인터페이스를 통해 직접적 또는 간접적으로 제공한다.
III. Euro NCAP에서 요구하는 DMS 평가 프로토콜
Euro NCAP(European New Car Assessment Programme)은 유럽에서의 신차 평가 프로그램이며, 탑승자(Occupant) 상태 모니터링을 안전벨트 리마인더 평가와 운전자 상태 모니터링 평가로 구성하여 진행한다[9].
1. Euro NCAP 운전자 상태 분류
Euro NCAP은 운전자 행동뿐만 아니라 운전자 상태를 일시적 상태(Transient State)와 비일시적 상태(Non-Transient State)로 구분하여 평가한다. 운전자 행동은 식사하기, 말하기, 웃기, 노래 부르기, 흡연, 눈 비비기, 재채기 등으로 구성된다.
일시적 상태는 운전자의 주의가 일시적으로 분산되는 상황을 의미하며, 여기에는 장시간 주의분산, 단시간 주의분산, 시각적 주의 시간 분할, 그리고 휴대전화 사용이 포함된다. 장시간 주의분산은 비운전 과제(Non-Driving Task) 수행 시 머리와 눈을 함께 이동하는 Owl, 눈동자만 이동하는 Lizard, 또는 몸통을 기울이는 Body Lean 형태의 시선 이동을 포함하며, 운전 과제(Driving Task) 수행 중에도 Owl과 Lizard 유형으로 나타날 수 있다. 단시간 주의분산은 비운전 또는 운전 과제 수행 중 발생하는 반복적이고 짧은 시선 분산으로 정의되며, 하나 이상의 목표물을 동시에 주시하는 다중 타깃(Multi-Target) 상황도 이에 해당한다. 또한, 휴대전화 사용은 일시적 상태의 하위 범주로 분류되며, 단순 시선 이동을 포함하는 기본(Basic) 수준과 조작을 포함하는 고급(Advanced) 수준으로 나누어 평가된다.
반면, 비일시적 상태는 운전자가 정상적인 주행을 지속적으로 수행하기 어려운 보다 심각한 상황을 의미한다. 여기에 해당하는 상태는 음주‧약물 등으로 인한 손상(Impairment), 졸음(Drowsiness), 순간적 수면(Microsleep), 지속적 수면(Sleep), 질병이나 기타 원인으로 인해 운전자가 전혀 반응하지 않는 무응답(Unresponsive Driver) 상태로 구분된다[9,10].
2. Euro NCAP 운전자 시선 고정 지점
Euro NCAP에서 요구하는 주의분산은 표 3에 기술된 고정 지점을 운전자가 3초 이상 Owl을 움직여 바라보거나, Lizard 시선으로 바라보거나, 몸을 기울여 바라보는 경우에는 장시간 주의분산으로 판단한다. 단시간 주의분산은 30초 동안 누적했을 때 10초간 바라보는 경우로 판단한다. Euro NCAP에서는 휴대전화 사용에 대해서는 표 4에 명시된 사항을 기준으로 휴대전화 사용에 대한 상태를 모니터링한다[10].
표 3 Euro NCAP 시스템의 운전자 주의분산 평가용 시선 고정 지점
3. Euro NCAP 주의분산 테스트 방법
Euro NCAP에서는 비운전 과제와 운전 과제 상황에서 운전자의 주의분산을 평가하기 위해 Owl과 Lizard 시선 패턴을 활용하며, 비운전 과제 상황에서는 추가적으로 몸 기울임 테스트도 수행한다. 이 과정에서 운전자의 시선 고정 시간, 시선 전환 및 반응 능력을 평가한다.
차량 속도가 시속 20km 이상일 때, 운전자의 시선이 표 3에 명시된 특정 위치에 3초 이상 고정되면 장시간 주의분산으로 간주되고, 30초 동안 주의분산 시간이 10초 이상 누적되면 단시간 주의분산으로 평가되는데 시선이 2초 이상 전방 도로로 돌아올 경우 누적 시간이 초기화된다.
표 5는 비운전 과제 및 운전 과제에 대한 Owl 장시간 주의분산을 테스트하기 위해서는 운전자는 머리를 자연스럽게 돌려 목표 지점을 바라보고 최대 5초간 시선을 유지한다. 경고가 발생하면 즉시 시선을 전방 도로로 돌리는 반응 시간과 시선 전환 능력을 평가한다. Lizard 장시간 주의분산을 테스트하기 위해서는 머리와 몸을 고정한 상태에서 눈만으로 목표 지점을 바라보며 5초간 시선을 유지하고, 경고 발생 시 시선을 전방 도로로 돌리는 능력을 평가한다. Owl 및 Lizard 단시간 주의분산을 테스트하기 위해서는 운전자의 시선이 30초 중 10초 이상 특정 위치를 향하도록 한다. 이때, 시선이 2초 이상 도로로 돌아올 경우 누적 시간을 초기화한다. 비운전 과제 상황에서의 몸 기울임 테스트에서는, 운전자는 전방 도로를 바라보는 자세에서 시선을 돌려 어깨너머로 반대편 후방 머리 받침대를 바라보는 동작을 수행한다. 또한, 같은 자세에서 시선을 돌려 옆좌석 승객의 발 받침대 쪽으로 손을 뻗는 움직임을 하면서 평가한다[2].
표 5 Euro NCAP 운전자 주의분산 테스트
4. Euro NCAP 휴대전화 사용에 대한 테스트 방법
Euro NCAP에서는 Owl과 Lizard 시선 패턴을 활용하여 운전자가 일정 시간 동안 표 4에 명시한 지점에 있는 휴대전화를 바라보는 상황을 모니터링하고, 휴대전화 사용에 따른 주의분산을 평가한다. 표 6은 차량 속도가 시속 20km 이상일 때 운전자가 휴대전화를 사용하는 동안 발생할 수 있는 주의분산을 평가하는 테스트 방법이다[11]. Owl 휴대전화 사용은 머리를 돌려 휴대전화를 바라본 후 다시 전방 도로로 시선을 전환하는 방식이며, Lizard 시선 패턴은 몸과 머리를 고정한 상태에서 눈으로만 휴대전화를 응시하는 방식이다.
표 6 Euro NCAP 휴대전화 사용 테스트 조건
| 유형 | 시험 방법 | 제한 조건 |
|---|---|---|
| Owl | 운전자가 머리를 돌려 휴대전화를 보고 다시 도로를 바라봄. 30초 중 10초 이상 휴대전화를 보면 주의분산으로 간주하며, 도로로 2초 이상 시선을 복귀하면 Reset하고 다시 측정 | 시선 이동: 0.48초 안에 |
| Lizard | 운전자는 몸과 머리를 고정한 상태에서 눈만 움직여 휴대전화를 바라봄 | 시선 이동: 0.16초 안에 |
표 4 Euro NCAP 시스템의 휴대전화 사용 상태 평가용 시선 고정 지점
5. Euro NCAP 비일시적 상태 테스트 방법
Euro NCAP에서는 운전 수행 능력이 부분적 또는 완전히 저하되어 운전을 멈추고 휴식을 취해야 회복이 가능한 비일시적 상태를 표 7과 같이 평가한다.
표 7 Euro NCAP 비일시적 상태 테스트
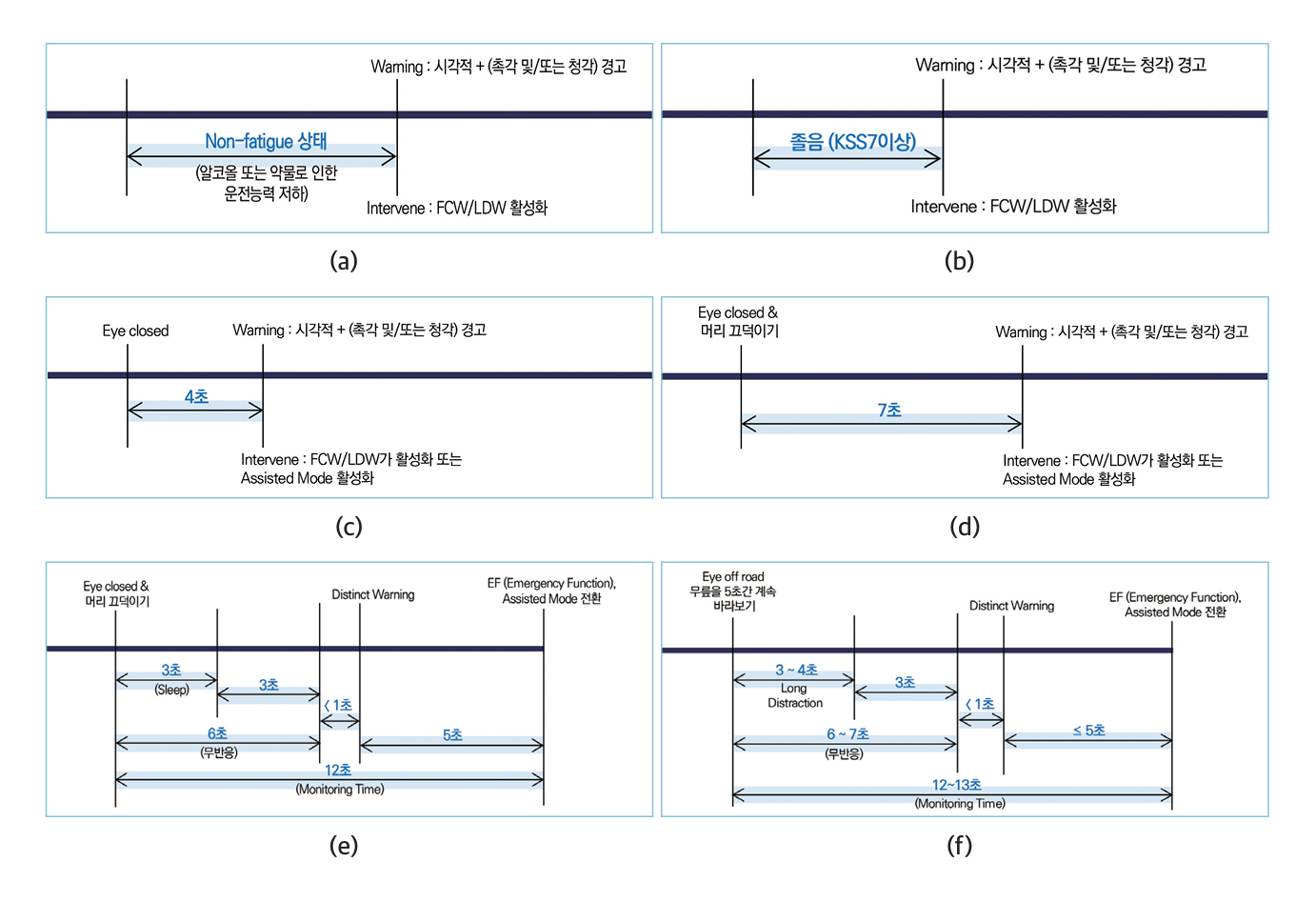
Non-Fatigue 상태는 알코올 또는 약물로 인한 피로와 무관한 운전능력 저하상태를 의미한다. 졸음 상태는 운전자가 KSS(Karolinska Sleepiness Scale) 7 상태일 때 발생하며, 졸음(Drowsiness)을 느끼고 깨어 있기 위해 상당한 노력이 필요한 상태이다. 마이크로슬립은 3초 미만 동안 눈을 감고 있을 때이고 수면 상태는 3초 이상 눈을 감고 있을 때로 판단한다. 무반응 상태는 주의 경고가 발령된 후 3초 이내에 시선을 전방 도로로 돌리지 않거나, 시선이 전방 도로에서 벗어나 있거나 눈을 감고 있는 시간이 6초 이상일 때로 판단한다.
6. Euro NCAP 차량 반응 요구사항
Euro NCAP 기준을 만족하기 위해서는 모두 차량이 시속 20km 이상으로 주행할 때, 운전자가 비운전 과제와 운전 과제 상황에서 주의분산이 발생하면 즉시 시각적 + (촉각 및/또는 청각) 경고를 발령한다. 주의분산으로 분류되면 높은 민감도의 FCW (Forward Collision Warning) 설정이 활성화되고 낮은 수준의 차량 제동이 개입되고 운전자의 주의가 회복될 때까지 유지한다.
휴대전화 사용은 운전자가 반복적으로 휴대전화를 바라보는 특정 유형의 단시간 산만함(또는 시각적 주의분산) 사건으로 간주되어 즉시 시각적 + (촉각 및/또는 청각) 경고를 발령한다. 휴대전화 사용으로 인한 주의분산으로 분류된 즉시 높은 민감도의 FCW 설정이 활성화되고 낮은 수준의 차량 제동이 개입되고 활성화되고, 운전자의 주의가 회복될 때 까지 유지한다.
Euro NCAP 비일시적 유형에 따른 차량 반응 형태는 그림 1과 같다. 운전자가 Non-Fatigue, 졸음, 마이크로슬립, 수면으로 분류된 즉시 시각적 + (촉각 및/또는 청각) 경고를 발령한다. Non-Fatigue, 졸음과 다르게 마이크로슬립, 수면인 상태가 되면 Assisted Mode가 활성화될 수도 있다. 또한, 무반응 상태에서는 지속된 경고에 반응하지 않을 경우 응급상황으로 간주하고 Assisted Mode가 활성화된다.
IV. UNECE WP.29에서 요구하는 DMS 평가 프로토콜
1. 운전자 가용성과 주의력 평가
UNECE WP.29는 표 8에서 제시된 조건을 기반으로 운전자의 가용성(Driver Availability)과 운전자의 주의력(Driver Attentiveness)을 모니터링하여 운전자 상태를 평가하도록 규정하고 있다[12]. 이에 따라 DMS는 운전자가 제어권 전환 요구(Take-Over Request)에 즉시 대응할 수 있는 적절한 운전 자세 및 위치에 있으며, 운전 작업을 안전하게 인수할 수 있는지 여부를 판단해야 한다.
표 8 UNECE 시스템의 운전자 상태 평가 기준
| 유형 | 실험 조건 |
|---|---|
| 가용성 | 30초 동안 운전자가 최소 두 가지 이상의 가용성 기준(예: 직접 차량 조작, 눈 깜박임, 의식적인 머리/몸 움직임)을 충족하는지 평가 |
| 주의력 | 다음 기준 중 하나를 만족하면 운전자가 주의를 기울인 것으로 간주함 |
| (a) 시선이 도로를 향함 | |
| (b) 시선이 룸미러에 집중됨 | |
| (c) 머리 움직임이 운전에 맞게 이루어짐 |
출처 Reproduced from United Nations, “Regulation No. 157: Uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems,” 2021, p. 13. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:42021X0389
2. UNECE 차량반응 요구사항
UNECE에서 요구하는 운전자 모니터링 시스템은 운전자가 가용성 기준을 위반하는 경우 즉시 특정한 경고를 제공해야 한다.
이 경고는 운전자의 적절한 행동이 감지되거나, 차량이 제어권 전환 요구를 개시할 때까지 연속적으로 유지되어야 한다. 또한 경고가 15초 이상 지속될 경우, 제어권 전환 요구가 시작되어야 하고 모든 가용성 기준의 요구 시간 간격은 30초를 초과하지 않아야 한다. 제어권 전환 요구는 시각적(Optical) 신호와 추가적으로 음향(Acoustic) 또는 촉각(Haptic) 신호를 포함해야 하며, 시작 후 최소 4초 이내에는 차량이 정차 상태가 아닌 경우 지속적 또는 간헐적인 햅틱 경고가 제공되어야 한다.
V. 결론
본고에서는 자율주행 차량에서 운전자 모니터링 시스템의 중요성과 다양한 국제 기준에 따른 DMS 평가 프로토콜을 검토하였다. ADDW, Euro NCAP, 및 UNECE WP.29와 같은 기준들은 운전자 상태를 효과적으로 판단하고 관리할 수 있도록 설계되었다. 각 기준에서는 주의분산 상태를 판별하기 위한 운전자의 시선 위치 고정점을 정의하고, 운전자의 주의분산, 휴대전화 사용, Non-Fatigue, 피로, 졸음, 마이크로슬립, 수면, 무응답 등의 상태를 평가하기 위한 테스트 방법과 차량 반응 요구사항을 제시하고 있다. 이것은 DMS의 성능을 체계적으로 평가하고, 그 효과를 최적화하는 데 필수적이다.
본 연구는 운전자의 행동과 상태를 평가할 수 있는 다양한 DMS 평가 프로토콜을 고찰함으로써 자율주행 차량의 신뢰성을 높이고, 최종 사용자에게 보다 안전한 주행 환경을 제공한다.
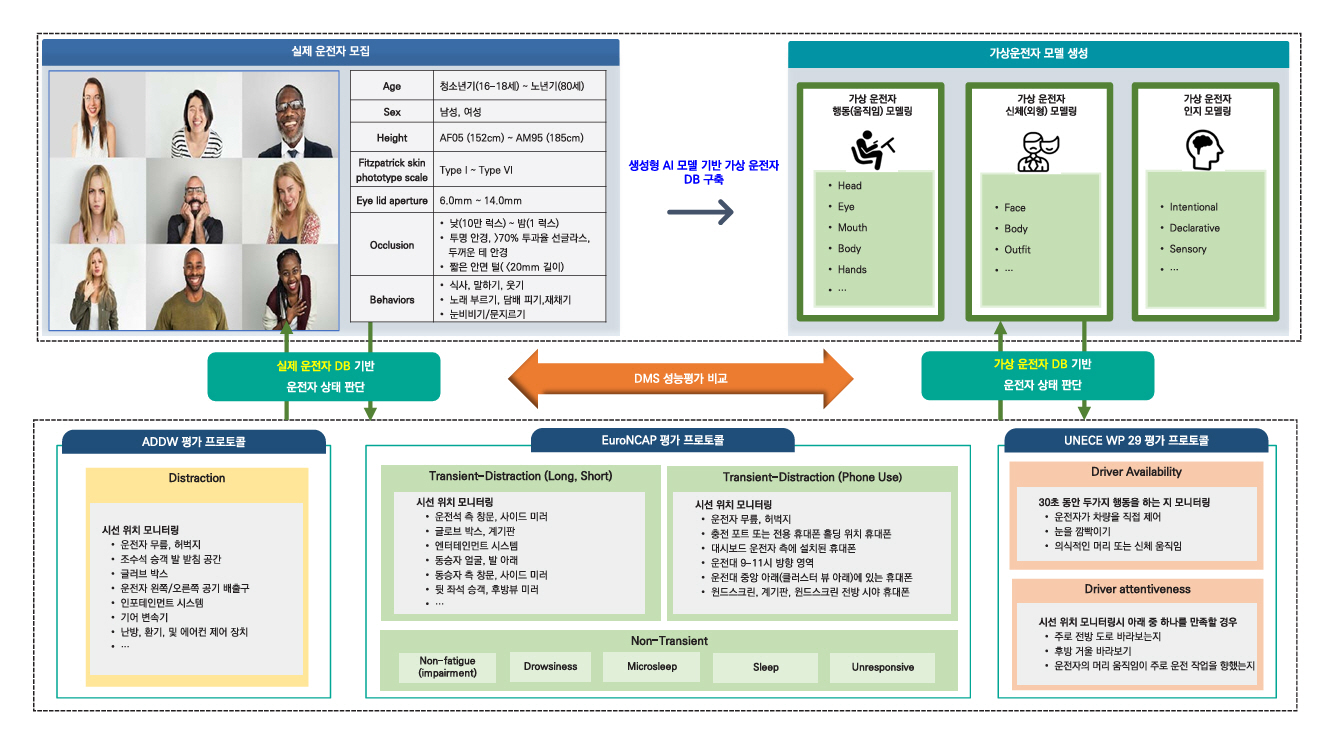
Euro NCAP Assessment Protocol은 DMS 성능 평가를 위해 성별, 나이, 지위, 피부색, 눈동자 색, 동공 크기, 안경/선글라스 변경 등을 고려한 다양한 운전자 평가군을 모집하는 것을 권장하고 있다. 향후에는 그림 2에 제시된 바와 같이, 실제 운전자를 모집하여 DMS를 평가할 뿐만 아니라 생성형 AI 기술을 활용하여 가상 운전자 모델을 통한 DMS 평가 기술에 대해 연구할 예정이다. 이를 위해 실제 운전자를 모집하여 다양한 행동 시나리오를 도출하고, 이를 기반으로 운전자 DB를 구축해야 한다. 이후 생성형 AI 모델을 사용하여 가상 운전자 모델을 생성하고, 이 모델을 이용해 DMS 성능을 가상 환경에서 평가함으로써 실제 운전 환경에서의 DMS 성능이 일치하는지를 분석할 예정이다[13,14]. 또한, 가상 운전자 모델을 이용한 DMS 평가가 실제 운전 환경에서의 DMS 성능과 일치하는지를 분석하여 DMS 시험 기간과 비용 단축을 유도하고 DMS 기술 생태계의 선순환을 이끄는 데 이바지할 예정이다.
용어해설
KSS(Karolinska Sleepiness Scale) 운전자의 주관적인 졸음 상태를 평가하기 위한 척도이며 9단계(1: 매우 깨어 있음~9: 거의 잠듦)로 구성
UNECE(United Nations Economic Commission for Europe) 유엔 유럽 경제 위원회
Euro NCAP(European New Car Assessment Programme) 유럽에서의 신차 평가 프로그램
ADDW(Advanced Driver Distraction Warning System) 첨단 운전자 주의분산 경고 시스템
DMS(Driver Monitoring System) 운전자 상태 모니터링 시스템
Owl Type Movement 운전자가 전방 주시에서 시선을 다른 곳으로 이동하는데, 주로 머리를 회전시키고 눈을 움직여 시선을 옮기는 동작
Lizard Type Movement 운전자가 전방 주시를 유지한 채 머리와 얼굴은 그대로 두고, 눈동자만 움직여 다른 작업이나 위치에 시선을 두는 동작
SAE International, "Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (SAE J3016_202104)," 2021. 4. 30.
European Parliament, "Road fatality statistics in the EU (infographic)," 2019. 4. 10. https://www.europarl.europa.eu/topics/en/article/20190410STO36615/road-fatality-statistics-in-the-eu-infographic
World Health Organization, "Global status report on road safety 2018." https://www.who.int/publications/i/item/9789241565684
European Union, "ANNEX I, PART 1: Technical requirements for the advanced driver distraction warning (ADDW) systems," in Commission Delegated Regulation (EU) 2023/2590, Official Journal of the European Union, 2023. 7. 13. https://eurlex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX%3A32023R2590
European Union, "ANNEX I, PART 2: Test procedures for spot-check testing of ADDW systems by type approval authorities and technical services," in Commission Delegated Regulation (EU) 2023/2590, Official Journal of the European Union, 2023. 7. 13. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX%3A32023R2590
Euro NCAP, "European New Car Assessment Programme, Assessment Protocol - Safety Assist, Safe Driving version 10.1," 2022. 7.
United Nations, "Regulation No. 157: Uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems," 2021. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:42021X0389
그림 1
Euro NCAP 비일시적 유형에 따른 차량 반응 형태: (a) Non-Fatigue 상태, (b) 졸음 상태, (c) 마이크로슬립 상태, (d) 수면 상태, (e) 무반응 상태(수면 이후 판단), (f) 무반응 상태(장시간 주의분산 이후 판단)
출처 Reproduced from Euro NCAP, “Safe Driving Driver Engagement – Protocol version 1.0,” 2025. 3.
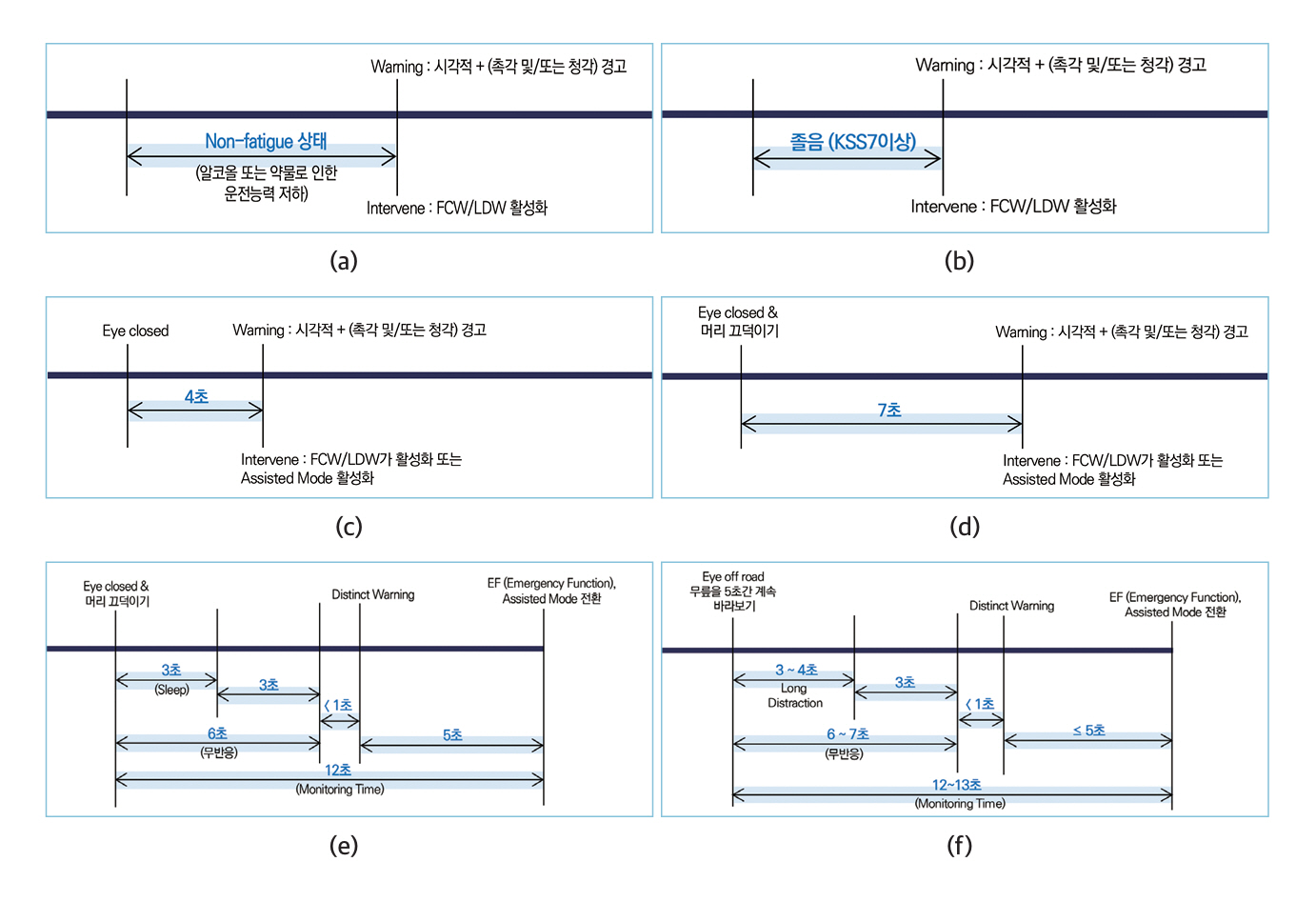
그림 2
실제 운전자 DB와 가상 운전자 모델을 활용한 DMS 성능 평가 비교 예시
출처 Reprinted with permission from 김현숙 외, “자율주행차 운전자 모니터링 시스템 평가 방법에 대한 연구,” 한국자동차공학회 추계학술대회 및 전시회, 2024. 11. pp. 823–824.
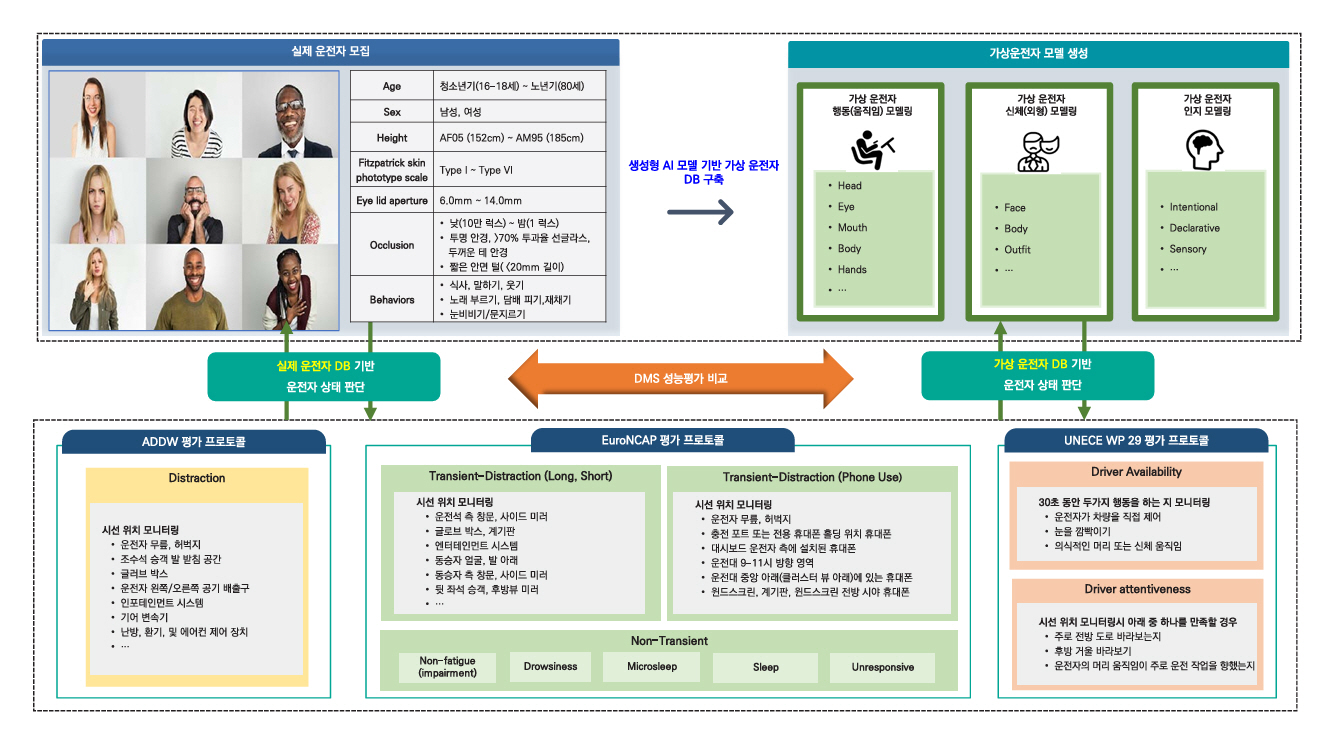
표 1 ADDW 시스템의 시선 고정 지점
출처 Reproduced from European Union, “ANNEX I, PART 2: Test procedures for spot-check testing of ADDW systems by type approval authorities and technical services,” in Commission Delegated Regulation (EU) 2023/2590, Official Journal of the European Union, 2023. 7. 13. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX%3A32023R2590
표 2 ADDW 시스템의 주행 속도 조건별 운전자 주의분산 평가 기준
| 구분 | 속도 20~35km/h | 속도 50~65km/h |
|---|---|---|
| 경고 조건 | 6.5초 이내 경고(0.5초 버퍼 포함) | 4초 이내 경고(0.5초 버퍼 포함) |
| 판정 기준 | 지점당 최대 2회 시도 가능, 두 번 모두 실패 시 불합격 | 지점당 최대 2회 시도 가능, 두 번 모두 실패 시 불합격 |
출처 Reproduced from European Union, “ANNEX I, PART 2: Test procedures for spot-check testing of ADDW systems by type approval authorities and technical services,” in Commission Delegated Regulation (EU) 2023/2590, Official Journal of the European Union, 2023. 7. 13. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX%3A32023R2590
표 3 Euro NCAP 시스템의 운전자 주의분산 평가용 시선 고정 지점
출처 Reproduced from Euro NCAP, “Safe Driving Driver Engagement – Protocol version 1.0,” 2025. 3, pp. 13-14.
표 5 Euro NCAP 운전자 주의분산 테스트
출처 Reproduced from Euro NCAP, “Driver Monitoring Test Procedure - Safe Driving version 1.0,” 2025. 3, pp. 6-7.
표 6 Euro NCAP 휴대전화 사용 테스트 조건
| 유형 | 시험 방법 | 제한 조건 |
|---|---|---|
| Owl | 운전자가 머리를 돌려 휴대전화를 보고 다시 도로를 바라봄. 30초 중 10초 이상 휴대전화를 보면 주의분산으로 간주하며, 도로로 2초 이상 시선을 복귀하면 Reset하고 다시 측정 | 시선 이동: 0.48초 안에 |
| Lizard | 운전자는 몸과 머리를 고정한 상태에서 눈만 움직여 휴대전화를 바라봄 | 시선 이동: 0.16초 안에 |
출처 Reproduced from Euro NCAP, “Driver Status Monitoring Spot Testing Guidance version 1.0,” 2022. 7, pp. 7–8.
표 4 Euro NCAP 시스템의 휴대전화 사용 상태 평가용 시선 고정 지점
출처 Reproduced from Euro NCAP, “Safe Driving Driver Engagement – Protocol version 1.0,” 2025. 3, p. 15.
표 7 Euro NCAP 비일시적 상태 테스트
출처 Reproduced from Euro NCAP, “Safe Driving Driver Engagement – Protocol version 1.0,” 2025. 3, pp. 13, 16.
표 8 UNECE 시스템의 운전자 상태 평가 기준
| 유형 | 실험 조건 |
|---|---|
| 가용성 | 30초 동안 운전자가 최소 두 가지 이상의 가용성 기준(예: 직접 차량 조작, 눈 깜박임, 의식적인 머리/몸 움직임)을 충족하는지 평가 |
| 주의력 | 다음 기준 중 하나를 만족하면 운전자가 주의를 기울인 것으로 간주함 |
| (a) 시선이 도로를 향함 | |
| (b) 시선이 룸미러에 집중됨 | |
| (c) 머리 움직임이 운전에 맞게 이루어짐 |
출처 Reproduced from United Nations, “Regulation No. 157: Uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems,” 2021, p. 13. https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:42021X0389
- Sign Up
- 전자통신동향분석 이메일 전자저널 구독을 원하시는 경우 정확한 이메일 주소를 입력하시기 바랍니다.